JP6207429B2 - 連続紙プリンタにおける皺の検出 - Google Patents
連続紙プリンタにおける皺の検出 Download PDFInfo
- Publication number
- JP6207429B2 JP6207429B2 JP2014043472A JP2014043472A JP6207429B2 JP 6207429 B2 JP6207429 B2 JP 6207429B2 JP 2014043472 A JP2014043472 A JP 2014043472A JP 2014043472 A JP2014043472 A JP 2014043472A JP 6207429 B2 JP6207429 B2 JP 6207429B2
- Authority
- JP
- Japan
- Prior art keywords
- web
- media web
- media
- distance
- ink
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
- 230000037303 wrinkles Effects 0.000 title description 39
- 238000001514 detection method Methods 0.000 title description 2
- 238000000034 method Methods 0.000 claims description 49
- 230000008569 process Effects 0.000 claims description 27
- 230000004044 response Effects 0.000 claims description 6
- 230000003213 activating effect Effects 0.000 claims 1
- 238000003825 pressing Methods 0.000 claims 1
- 239000000976 ink Substances 0.000 description 106
- 230000008859 change Effects 0.000 description 9
- 239000007787 solid Substances 0.000 description 9
- 238000010586 diagram Methods 0.000 description 8
- 230000003287 optical effect Effects 0.000 description 7
- 239000012071 phase Substances 0.000 description 7
- 230000006870 function Effects 0.000 description 6
- 239000007788 liquid Substances 0.000 description 5
- 230000007480 spreading Effects 0.000 description 5
- 230000015572 biosynthetic process Effects 0.000 description 4
- 238000002844 melting Methods 0.000 description 4
- 230000008018 melting Effects 0.000 description 4
- 238000010304 firing Methods 0.000 description 3
- 238000010438 heat treatment Methods 0.000 description 3
- 239000000463 material Substances 0.000 description 3
- 230000009471 action Effects 0.000 description 2
- 230000007547 defect Effects 0.000 description 2
- 239000000839 emulsion Substances 0.000 description 2
- 238000012423 maintenance Methods 0.000 description 2
- 238000012015 optical character recognition Methods 0.000 description 2
- 239000008188 pellet Substances 0.000 description 2
- 239000000758 substrate Substances 0.000 description 2
- 230000037373 wrinkle formation Effects 0.000 description 2
- 240000000254 Agrostemma githago Species 0.000 description 1
- 235000009899 Agrostemma githago Nutrition 0.000 description 1
- 230000005355 Hall effect Effects 0.000 description 1
- 230000002776 aggregation Effects 0.000 description 1
- 238000004220 aggregation Methods 0.000 description 1
- 229920013822 aminosilicone Polymers 0.000 description 1
- 239000003795 chemical substances by application Substances 0.000 description 1
- 238000004140 cleaning Methods 0.000 description 1
- 230000000694 effects Effects 0.000 description 1
- 239000008187 granular material Substances 0.000 description 1
- 230000007246 mechanism Effects 0.000 description 1
- 230000000737 periodic effect Effects 0.000 description 1
- 239000007790 solid phase Substances 0.000 description 1
- 239000002904 solvent Substances 0.000 description 1
- 239000000725 suspension Substances 0.000 description 1
- 230000007704 transition Effects 0.000 description 1
- 239000002699 waste material Substances 0.000 description 1
- XLYOFNOQVPJJNP-UHFFFAOYSA-N water Substances O XLYOFNOQVPJJNP-UHFFFAOYSA-N 0.000 description 1
Images







Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B41—PRINTING; LINING MACHINES; TYPEWRITERS; STAMPS
- B41F—PRINTING MACHINES OR PRESSES
- B41F33/00—Indicating, counting, warning, control or safety devices
- B41F33/0036—Devices for scanning or checking the printed matter for quality control
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B41—PRINTING; LINING MACHINES; TYPEWRITERS; STAMPS
- B41F—PRINTING MACHINES OR PRESSES
- B41F21/00—Devices for conveying sheets through printing apparatus or machines
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B41—PRINTING; LINING MACHINES; TYPEWRITERS; STAMPS
- B41F—PRINTING MACHINES OR PRESSES
- B41F13/00—Common details of rotary presses or machines
- B41F13/02—Conveying or guiding webs through presses or machines
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B41—PRINTING; LINING MACHINES; TYPEWRITERS; STAMPS
- B41J—TYPEWRITERS; SELECTIVE PRINTING MECHANISMS, i.e. MECHANISMS PRINTING OTHERWISE THAN FROM A FORME; CORRECTION OF TYPOGRAPHICAL ERRORS
- B41J11/00—Devices or arrangements of selective printing mechanisms, e.g. ink-jet printers or thermal printers, for supporting or handling copy material in sheet or web form
- B41J11/0095—Detecting means for copy material, e.g. for detecting or sensing presence of copy material or its leading or trailing end
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B41—PRINTING; LINING MACHINES; TYPEWRITERS; STAMPS
- B41J—TYPEWRITERS; SELECTIVE PRINTING MECHANISMS, i.e. MECHANISMS PRINTING OTHERWISE THAN FROM A FORME; CORRECTION OF TYPOGRAPHICAL ERRORS
- B41J15/00—Devices or arrangements of selective printing mechanisms, e.g. ink-jet printers or thermal printers, specially adapted for supporting or handling copy material in continuous form, e.g. webs
- B41J15/04—Supporting, feeding, or guiding devices; Mountings for web rolls or spindles
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01N—INVESTIGATING OR ANALYSING MATERIALS BY DETERMINING THEIR CHEMICAL OR PHYSICAL PROPERTIES
- G01N21/00—Investigating or analysing materials by the use of optical means, i.e. using sub-millimetre waves, infrared, visible or ultraviolet light
- G01N21/84—Systems specially adapted for particular applications
- G01N21/88—Investigating the presence of flaws or contamination
- G01N21/89—Investigating the presence of flaws or contamination in moving material, e.g. running paper or textiles
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B41—PRINTING; LINING MACHINES; TYPEWRITERS; STAMPS
- B41J—TYPEWRITERS; SELECTIVE PRINTING MECHANISMS, i.e. MECHANISMS PRINTING OTHERWISE THAN FROM A FORME; CORRECTION OF TYPOGRAPHICAL ERRORS
- B41J2203/00—Embodiments of or processes related to the control of the printing process
- B41J2203/01—Inspecting a printed medium or a medium to be printed using a sensing device
- B41J2203/011—Inspecting the shape or condition, e.g. wrinkled or warped, of a medium to be printed before printing on it
Landscapes
- Engineering & Computer Science (AREA)
- Mechanical Engineering (AREA)
- Textile Engineering (AREA)
- Physics & Mathematics (AREA)
- Health & Medical Sciences (AREA)
- Life Sciences & Earth Sciences (AREA)
- Chemical & Material Sciences (AREA)
- Analytical Chemistry (AREA)
- Biochemistry (AREA)
- General Health & Medical Sciences (AREA)
- General Physics & Mathematics (AREA)
- Immunology (AREA)
- Pathology (AREA)
- Quality & Reliability (AREA)
- Ink Jet (AREA)
- Controlling Sheets Or Webs (AREA)
- Registering, Tensioning, Guiding Webs, And Rollers Therefor (AREA)
- Accessory Devices And Overall Control Thereof (AREA)
Description
Claims (3)
- ウェブ印刷システムであって、
媒体ウェブを前記ウェブ印刷システム内でプロセス方向へ動かすように構成される媒体輸送システムと、
前記媒体ウェブの幅に渡ってプロセス横断方向に延びる複数のインクジェットを有する少なくとも1つのプリントヘッドと、を備え、前記プロセス横断方向は、前記媒体ウェブの平面内で前記プロセス方向に対して垂直であり、前記プリントヘッドは、前記媒体ウェブが前記プロセス方向に移動するにつれて前記複数のインクジェットから前記媒体ウェブ上へインク滴を噴出するように構成され、
前記ウェブ印刷システムはさらに、
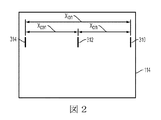
前記媒体ウェブ上にマーキングされた第1のポジション、前記媒体ウェブ上にマーキングされたセンタポジション、および前記媒体ウェブ上にマーキングされた第2のポジションを検出するように配置された複数の密着イメージセンサと、
前記媒体輸送システム、前記少なくとも1つのプリントヘッド、および前記複数の密着イメージセンサへ機能的に接続されるコントローラと、を備え、
前記コントローラは、
前記ウェブ印刷システム内で前記媒体ウェブを移動させるべく前記媒体輸送システムを作動し、
前記媒体ウェブが前記ウェブ印刷システム内で前記プロセス方向に移動するにつれて前記媒体ウェブ上へインクを噴出して前記第1のポジション、前記センタポジション、および前記第2のポジションを前記媒体ウェブ上にマーキングすべく、前記少なくとも1つのプリントヘッドを作動するように構成され、前記媒体ウェブ上にマーキングされた前記第1のポジションと前記媒体ウェブ上にマーキングされた前記第2のポジションとは、前記媒体ウェブ上にマーキングされた前記センタポジションから前記プロセス横断方向に等しく離隔され、
前記コントローラはさらに、
前記媒体ウェブ上にマーキングされた前記第1のポジション、前記媒体ウェブ上にマーキングされた前記センタポジション、および前記媒体ウェブ上にマーキングされた前記第2のポジションに対応する画像データを生成すべく前記複数の密着イメージセンサを作動し、
前記センタポジションに対応する画像データおよび前記第1のポジションに対応する画像データを参照して、前記プロセス横断方向における前記媒体ウェブ上での第1の距離を識別し、
前記センタポジションに対応する画像データおよび前記第2のポジションに対応する画像データを参照して、前記プロセス横断方向における前記媒体ウェブ上での第2の距離を識別するように構成され、前記第1のポジションに対応する画像データと前記第2のポジションに対応する画像データとは異なるものであり、
前記コントローラはさらに、
前記第1の距離と第1の予め決められた距離との間の第1の差、および前記第2の距離と第2の予め決められた距離との間の第2の差を測定し、
前記第1の距離が前記第1の予め決められた距離より短いことに応答して、前記媒体ウェブにおける皺の位置を前記センタポジションの内側として識別し、かつ、前記第2の距離が前記第2の予め決められた距離より短いことに応答して、前記皺の位置を前記センタポジションの外側として識別するように構成され、
前記ウェブ印刷システムは、さらに、スプレッダローラと、前記スプレッダローラと共にニップを形成する加圧ローラとを備え、前記ニップは、前記媒体ウェブが前記ニップを通過するにつれて前記媒体ウェブに圧力を加えるように構成され、
前記コントローラは、さらに、前記媒体ウェブ内の前記皺の前記識別された位置に応答して、オペレータを促して前記スプレッダローラに対する前記加圧ローラの負荷を調整させるように構成される、
ウェブ印刷システム。 - 前記複数の密着イメージセンサは、さらに、
前記媒体ウェブ上にマーキングされた前記第1のポジションを検出するように位置合わせされる第1のセンサと、
前記媒体ウェブ上にマーキングされた前記センタポジションを検出するように位置合わせされる第2のセンサと、
前記媒体ウェブ上にマーキングされた前記第2のポジションを検出するように位置合わせされる第3のセンサとを備える、請求項1に記載のウェブ印刷システム - 前記コントローラは、さらに、
本ウェブ印刷システム内で前記媒体ウェブが移動するにつれて、前記媒体ウェブ上の前記第1のポジション、前記媒体ウェブ上の前記センタポジション、および前記媒体ウェブ上の前記第2のポジションを前記媒体ウェブの文書間エリア上にマーキングすべく前記少なくとも1つのプリントヘッドを作動するように構成される、請求項1に記載のウェブ印刷システム。
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| US13/852,096 | 2013-03-28 | ||
| US13/852,096 US9027477B2 (en) | 2013-03-28 | 2013-03-28 | Wrinkle detection in continuous feed printers |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2014193772A JP2014193772A (ja) | 2014-10-09 |
| JP2014193772A5 JP2014193772A5 (ja) | 2017-05-25 |
| JP6207429B2 true JP6207429B2 (ja) | 2017-10-04 |
Family
ID=51520014
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2014043472A Expired - Fee Related JP6207429B2 (ja) | 2013-03-28 | 2014-03-06 | 連続紙プリンタにおける皺の検出 |
Country Status (4)
| Country | Link |
|---|---|
| US (1) | US9027477B2 (ja) |
| JP (1) | JP6207429B2 (ja) |
| CN (1) | CN104070837B (ja) |
| DE (1) | DE102014204704A1 (ja) |
Families Citing this family (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US20150328880A1 (en) * | 2014-05-19 | 2015-11-19 | Matthias Hermann Regelsberger | Drive gears providing improved registration in printing cylinder systems |
| JP6345635B2 (ja) * | 2015-09-03 | 2018-06-20 | 富士フイルム株式会社 | インクジェット記録装置 |
| CN105600577B (zh) * | 2015-12-24 | 2018-05-11 | 长园和鹰智能科技有限公司 | 自动铺布机及其自动理布装置 |
| WO2020162881A1 (en) | 2019-02-05 | 2020-08-13 | Hewlett-Packard Development Company, L.P. | Tension adjustments in printers to prevent slipping |
| CN115243903B (zh) * | 2020-03-12 | 2024-05-31 | 克里奥瓦克公司 | 用于处理柔性幅材的系统和方法 |
| US12409668B2 (en) | 2020-03-12 | 2025-09-09 | Cryovac, Llc | Systems and methods for printing a flexible web and printing compositions |
| DE102023205295A1 (de) * | 2023-06-06 | 2024-12-12 | Bhs Corrugated Maschinen- Und Anlagenbau Gmbh | Anlage mit einem Digitaldrucker und Verfahren zum Bedrucken einer Papierbahn |
Family Cites Families (15)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| DE2700004A1 (de) | 1977-01-03 | 1978-07-06 | Sick Optik Elektronik Erwin | Elektro-optische faltenueberwachungsvorrichtung |
| DE3136705C1 (de) * | 1981-09-16 | 1982-10-28 | M.A.N.- Roland Druckmaschinen AG, 6050 Offenbach | Verfahren zur Herstellung passgenauer Drucke in Druckmaschinen |
| GB8610304D0 (en) | 1986-04-28 | 1986-06-04 | Sira Ltd | Optical apparatus |
| US5949550A (en) | 1997-08-21 | 1999-09-07 | Consolidated Papers, Inc. | Method and apparatus for detecting defects in a moving web |
| US5992973A (en) * | 1998-10-20 | 1999-11-30 | Eastman Kodak Company | Ink jet printing registered color images |
| JP2003063691A (ja) * | 2001-08-29 | 2003-03-05 | Canon Inc | 画像形成装置 |
| JP2006084580A (ja) * | 2004-09-14 | 2006-03-30 | Fuji Xerox Co Ltd | 画像形成装置 |
| US7828423B2 (en) * | 2007-07-05 | 2010-11-09 | Xerox Corporation | Ink-jet printer using phase-change ink printing on a continuous web |
| JP4539753B2 (ja) | 2008-04-10 | 2010-09-08 | トヨタ自動車株式会社 | ウェブ搬送装置及びウェブ搬送制御方法 |
| DE102008043767A1 (de) | 2008-11-14 | 2010-06-02 | Koenig & Bauer Aktiengesellschaft | Druckmaschine und Verfahren zur Handhabung einer durch die Druckmaschine geführten Bahn |
| US8075086B2 (en) * | 2009-07-31 | 2011-12-13 | Xerox Corporation | Paper skew detection system |
| US8376516B2 (en) * | 2010-04-06 | 2013-02-19 | Xerox Corporation | System and method for operating a web printing system to compensate for dimensional changes in the web |
| US8328315B2 (en) * | 2010-04-16 | 2012-12-11 | Xerox Corporation | System and method for switching registration control modes in a continuous feed printer |
| JP5599239B2 (ja) * | 2010-06-28 | 2014-10-01 | 富士フイルム株式会社 | インクジェット印刷装置及びその印刷方法 |
| JP2012096852A (ja) * | 2010-10-29 | 2012-05-24 | Konica Minolta Business Technologies Inc | 用紙搬送装置及び画像形成装置 |
-
2013
- 2013-03-28 US US13/852,096 patent/US9027477B2/en active Active
-
2014
- 2014-03-06 JP JP2014043472A patent/JP6207429B2/ja not_active Expired - Fee Related
- 2014-03-12 CN CN201410090481.XA patent/CN104070837B/zh not_active Expired - Fee Related
- 2014-03-13 DE DE102014204704.8A patent/DE102014204704A1/de not_active Withdrawn
Also Published As
| Publication number | Publication date |
|---|---|
| CN104070837A (zh) | 2014-10-01 |
| DE102014204704A1 (de) | 2014-10-02 |
| CN104070837B (zh) | 2017-04-12 |
| JP2014193772A (ja) | 2014-10-09 |
| US20140290519A1 (en) | 2014-10-02 |
| US9027477B2 (en) | 2015-05-12 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6207429B2 (ja) | 連続紙プリンタにおける皺の検出 | |
| US9676202B2 (en) | System and method for detecting defects in an inkjet printer | |
| US8303071B2 (en) | System and method for controlling registration in a continuous feed tandem printer | |
| US8376497B2 (en) | Control system to minimize inadvertent ink jetting | |
| US8231196B2 (en) | Continuous feed duplex printer | |
| US8350879B2 (en) | Non-contact heating of solid ink prints after ink fixing | |
| KR101589766B1 (ko) | 연속 웨브 프린터를 위한 실시간 블리드 스루 검출 | |
| US8939536B2 (en) | Method and system for aligning printheads that eject clear ink in an inkjet printer | |
| US8757746B2 (en) | Printhead positioning for web gap adjustment | |
| US8251476B2 (en) | Ink drop position correction in the process direction based on ink drop position history | |
| EP3450185B1 (en) | Defect detection for print media | |
| US8814305B2 (en) | System and method for full-bleed and near full-bleed printing | |
| US9682573B2 (en) | Printer having edge control apparatus for web media | |
| US8985725B2 (en) | Method and apparatus for alignment of a low contrast ink printhead in an inkjet printer | |
| US20140085368A1 (en) | System and Method for First and Second Side Process Registration in a Single Print Zone Duplex Web Printer | |
| JP6034745B2 (ja) | インクジェットプリンタにおいてフルカラー合成画像を印刷するためのシステムおよび方法 | |
| JP2011126131A (ja) | 画像形成装置及び画像形成方法 | |
| US8641163B2 (en) | Temperature leveling roller and pressure nip assembly | |
| US10464342B1 (en) | Method for printing viewable transparent ink | |
| JP7155945B2 (ja) | 記録媒体加熱装置、液体吐出装置 | |
| US8764149B1 (en) | System and method for process direction registration of inkjets in a printer operating with a high speed image receiving surface | |
| JP7040182B2 (ja) | 液滴吐出装置、搬送制御装置、搬送制御方法、搬送制御プログラム | |
| US9132626B2 (en) | System and method for measuring cross-talk in inkjet printheads |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20170306 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20170306 |
|
| A871 | Explanation of circumstances concerning accelerated examination |
Free format text: JAPANESE INTERMEDIATE CODE: A871 Effective date: 20170403 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20170405 |
|
| A975 | Report on accelerated examination |
Free format text: JAPANESE INTERMEDIATE CODE: A971005 Effective date: 20170427 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20170516 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20170814 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20170829 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20170905 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 6207429 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| LAPS | Cancellation because of no payment of annual fees |