JP6204569B2 - 相互に協働するように構成されたホルダ装置を含む容器処理設備 - Google Patents
相互に協働するように構成されたホルダ装置を含む容器処理設備 Download PDFInfo
- Publication number
- JP6204569B2 JP6204569B2 JP2016509353A JP2016509353A JP6204569B2 JP 6204569 B2 JP6204569 B2 JP 6204569B2 JP 2016509353 A JP2016509353 A JP 2016509353A JP 2016509353 A JP2016509353 A JP 2016509353A JP 6204569 B2 JP6204569 B2 JP 6204569B2
- Authority
- JP
- Japan
- Prior art keywords
- jaw
- platform
- holder device
- movable jaw
- container
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images
















Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B65—CONVEYING; PACKING; STORING; HANDLING THIN OR FILAMENTARY MATERIAL
- B65G—TRANSPORT OR STORAGE DEVICES, e.g. CONVEYORS FOR LOADING OR TIPPING, SHOP CONVEYOR SYSTEMS OR PNEUMATIC TUBE CONVEYORS
- B65G47/00—Article or material-handling devices associated with conveyors; Methods employing such devices
- B65G47/52—Devices for transferring articles or materials between conveyors i.e. discharging or feeding devices
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B65—CONVEYING; PACKING; STORING; HANDLING THIN OR FILAMENTARY MATERIAL
- B65G—TRANSPORT OR STORAGE DEVICES, e.g. CONVEYORS FOR LOADING OR TIPPING, SHOP CONVEYOR SYSTEMS OR PNEUMATIC TUBE CONVEYORS
- B65G47/00—Article or material-handling devices associated with conveyors; Methods employing such devices
- B65G47/74—Feeding, transfer, or discharging devices of particular kinds or types
- B65G47/84—Star-shaped wheels or devices having endless travelling belts or chains, the wheels or devices being equipped with article-engaging elements
- B65G47/846—Star-shaped wheels or wheels equipped with article-engaging elements
- B65G47/847—Star-shaped wheels or wheels equipped with article-engaging elements the article-engaging elements being grippers
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B67—OPENING, CLOSING OR CLEANING BOTTLES, JARS OR SIMILAR CONTAINERS; LIQUID HANDLING
- B67C—CLEANING, FILLING WITH LIQUIDS OR SEMILIQUIDS, OR EMPTYING, OF BOTTLES, JARS, CANS, CASKS, BARRELS, OR SIMILAR CONTAINERS, NOT OTHERWISE PROVIDED FOR; FUNNELS
- B67C7/00—Concurrent cleaning, filling, and closing of bottles; Processes or devices for at least two of these operations
- B67C7/0006—Conveying; Synchronising
- B67C7/004—Conveying; Synchronising the containers travelling along a circular path
- B67C7/0046—Infeed and outfeed devices
- B67C7/0053—Infeed and outfeed devices using grippers
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B65—CONVEYING; PACKING; STORING; HANDLING THIN OR FILAMENTARY MATERIAL
- B65G—TRANSPORT OR STORAGE DEVICES, e.g. CONVEYORS FOR LOADING OR TIPPING, SHOP CONVEYOR SYSTEMS OR PNEUMATIC TUBE CONVEYORS
- B65G2201/00—Indexing codes relating to handling devices, e.g. conveyors, characterised by the type of product or load being conveyed or handled
- B65G2201/02—Articles
- B65G2201/0235—Containers
- B65G2201/0244—Bottles
Description
このような設備は、複数の回転式プラットフォームを装着されており、これらのプラットフォームには容器ホルダ装置が装着されていて、これらのプラットフォームを互いに隣接して配置することにより、対応設備を通る容器のための移動経路を画定する。
対応プラットフォームの運動中に容器を保持するために、容器のボディ又は周縁を保持するようにそれぞれのホルダ装置が配置されている。
ホルダ装置の開放は通常、可動顎部に固定されたホイールによって制御される。このホイールは対応プラットフォームに固定されたカムと協働する。
さらに、容器処理設備、具体的には食品の包装のために使用される設備を定期的に清浄化することが必要である。
にもかかわらず、汚れや他の不純物がカム及びホイール上に蓄積する傾向がある。残念ながら、これらの部分は洗浄するのが難しい。
なぜならば、具体的にはホルダ装置が対応プラットフォームの底部に締め付けられると、これらの部分にアクセスするのが難しいからである。
にもかかわらず、洗浄回路は、ホルダ装置及び連携するプラットフォームのホイール−カムシステムを洗浄するためには、特殊な前記ホイール−カムシステムを対象とする数多くのノズルを使用しないと効果がない。
この欠点は、処理設備が、衛生基準が特に厳しい農業食品業界で使用される場合には特に不都合である。
具体的には、ペグと駆動フィンガとの協働により、駆動フィンガを備えた可動顎部が閉位置から開位置へ動かされるように、ペグと駆動フィンガとが配置されている。
具体的には、可動顎部の自由端が駆動フィンガを形成する。
具体的には、ペグが、これが配置されている不動顎部から鉛直方向に延びている。
具体的には、各ホルダ装置が対応プラットフォームの底面に締め付けられており、底面とは反対側のプラットフォームの上面が、対応ホルダ装置に向かって下向きに傾斜している。
添付の図面が参照される。
設備は複数の隣接する回転式プラットフォーム、具体的には例えば2つの移送スター(transfer stars)(入口の第1プラットフォーム101、及び出口の第5プラットフォーム105)と、滅菌カルーセル(第2プラットフォーム102)と、充填カルーセル(第3プラットフォーム103)と、閉鎖カルーセル(第4プラットフォーム104)とを有している。
第2、第3、及び第4プラットフォーム102,103及び104にはそれぞれ滅菌装置、充填装置、及び閉鎖装置(図示せず)が載置されている。
設備は、容器を設備内に挿入するための導入装置106を有している。この導入装置は容器を第1プラットフォーム101へ運ぶ。
さらに設備は容器を取り出す装置107を有している。この装置は第5プラットフォーム105によって運ばれた容器を引き取り、これらを設備から取り去る。
例えば装置106及び107は搬送スクリュ、運動ベルト型コンベヤ、又は他のタイプの装置である。
これらのホルダ装置は、容器の周縁を直接クランプすることにより、又は周縁を覆うクロージャ部材をクランプすることにより、容器が周縁100で保持されるのを可能にする。
各ホルダ装置は対応プラットフォームの底面に締め付けられていることが好ましい。
各プラットフォームの上面、すなわちそのプラットフォームの底面とは反対側の面は、対応ホルダ装置に向かって下向きに傾斜している。
次いで冷却流体はプラットフォームのエッジを超えてそれぞれのホルダ装置上へ必然的にあふれ出る。
こうして実質的にプラットフォームの上面全体及びホルダ装置の大部分が清浄化流体と接触する。
このように、プラットフォームのそれぞれの真ん中に流体を噴霧するだけで設備の大部分を極めて簡単に清浄化又は滅菌することができる。
各ホルダ装置は不動顎部10を含んでいる。不動顎部はこの例では対応するプラットフォームと一体的に形成されている。
閉位置においては、不動顎部10及び可動顎部11は、容器の周縁100の断面よりも小さな貫通区分を画定するので、装置の顎部間に容器が存在すると、これらの顎部は容器の周縁100をクランプする。
容器を解放するための開位置においては、可動顎部11の自由端は不動顎部10の自由端から離れることにより、周縁の断面よりも大きい貫通区分を画定する。
不動顎部10及び可動顎部11は両方とも縦長(oblong)形状である。
従って、可動顎部11は周縁100に横方向の力を加えて、不動顎部の長手方向に対して垂直方向に延びる力を加えることはないので、周縁100がホルダ装置内により良好に保持されることを保証し得る。
従って、板ばねは単独で、可動ブレードが定置ブレードに対して動くのを可能にし、そして可動ブレードを閉位置へ戻す。本発明のホルダ装置はこのように2つの部分を含み、ひいては簡単且つ迅速に清浄化することができる。
また、第1当接部13及び顎部の自由端の後方に向かってオフセットされた第2回転中心の周りを可動顎部11が旋回することによって、可動顎部11が中間位置から開位置(図6b,7b,8b,及び9b)へ動くように板ばね16は配置されている。
板ばね16はさらに大きく変形してこの運動を可能にする。
すなわち可動顎部11が開位置にあるときに、板ばね16は弾性変形だけを蒙る。第2当接部14は、開位置を超えて可動顎部11を開くための合力が板ばね16に対して接線方向に延びるように配置されている。
このことは、例えばメンテナンス作業中に作業者がホルダ装置を手であまりにも大きく開こうとすることによって、板ばね16を塑性変形させることがないことを保証する。
従って、板ばね16の曲げ軸線が、第1回転中心の周りで旋回する可動顎部11の回転軸線と、第2回転中心の周りで旋回する可動顎部11の回転軸線とに対して平行になるように、板ばねは配置されている。
板ばね16の配置様式により、板ばね16が、不動顎部10及び可動顎部11と同じ平面内に延びる板ばねと比較してこの流れを極めて僅かにしか妨げないことを保証することができる。
このことは、流体が清浄化流体又は滅菌流体であって、板ばねの両主面を処理するのに役立つことができる場合に、特に有利である。
板ばね16はまた、従来技術のホルダ装置において使用される種類の摩擦ガイドピンを省くことができる。このような摩擦ガイドピンは通常、清浄化が難しい。
加えて、第2プラットフォーム102のホルダ装置の顎部と第3プラットフォーム103のホルダ装置の顎部とが、協働手段を備えている。この協働手段は、動作中に、顎部の協働だけで、第2プラットフォーム102から第3プラットフォーム103へ容器を移すことを目的として協働するのを可能にする。
さらに、第1プラットフォーム103のホルダ装置の顎部と第4プラットフォーム104のホルダ装置の顎部とが、協働手段を備えている。この協働手段は、動作中に、顎部の協働だけで、第3プラットフォーム103から第4プラットフォーム104へ容器を移すことを目的として協働するのを可能にする。
最後に、第4プラットフォーム104のホルダ装置の顎部と第5プラットフォーム105のホルダ装置の顎部とが、協働手段を備えている。この協働手段は、動作中に、顎部の協働だけで、第4プラットフォーム104から第5プラットフォーム105へ容器を移すことを目的として協働するのを可能にする。
変形例Dの協働手段は駆動フィンガ21を含む。この駆動フィンガは、前記のそれぞれの装置の可動顎部11に配置されている。
自由端は、駆動フィンガ21が、周縁の周りに延びる部分21.1と、部分21.1から離れる方向に延びて部分21.1と協働することによりV字形を形成する部分21.2とを有するように成形されている。
変形例Bのホルダ装置は、符号22を付けられた駆動フィンガの形状において、変形例Dのホルダ装置とは異なっている。
この駆動フィンガにおいて部分22.1及び22.2は、変形例Dのホルダ装置の駆動フィンガ21の部分21.1及び21.2によって形成されたV字形よりも若干深く、大きく広がるV字形状を形成している。
より正確に述べるならば、部分22.2は部分21.2よりも遠く離隔していて、より長い。
変形例Aのホルダ装置の協働手段はペグ30を有している。ペグ30は、前記のそれぞれの装置の不動顎部10に配置されている。
変形例Cのホルダ装置は、符号32を付けられた突起の配置において、変形例Aのホルダ装置とは異なっている。
この突起は、符号33を付けられたペグを担持している。
具体的にはこの例では、変形例Cの突起32は、不動顎部10の円形の切欠きから連続して延びているので、ペグ33と、変形例Cのホルダ装置が締め付けられているプラットフォーム104との間隔は、ペグ30と変形例Aのホルダ装置を担持するプラットフォーム102との間隔よりも大きい。
加えて、変形例Cの突起32はより長いので、ペグ33は自由端の他の部分から、変形例Aよりも大きく離れている。
容器を導入装置によって第1プラットフォーム101内に装填する。
導入装置は、容器の周縁100を第1プラットフォーム101の変形例Dのホルダ装置のうちの1つの中に押し込む。
次いで、変形例Dのホルダ装置は容器をクランプすることによって、第1プラットフォーム101の周りで容器を保持する。
より正確に述べるならば、第2プラットフォーム102の変形例Aのホルダ装置の可動顎部11の自由端と、変形例Dのホルダ装置の不動顎部10との重なり合い、変形例Aのホルダ装置の可動顎部11は容器の周縁によって、経路に沿って動く容器の作用下で閉位置から開位置へ動かされる。
変形例Aのホルダ装置の板ばね16は次いで、変形例Aのホルダ装置の可動顎部11を閉位置へ戻すので、第1プラットフォームと第2プラットフォームとの接点(図2)で、変形例A及び変形例D双方のホルダ装置が容器上にクランプされ、ひいてはこれらホルダ装置のそれぞれが容器を保持することができる。
変形例A及び変形例Dのホルダ装置が接点から離れるに従って、ペグ30が駆動フィンガ21の部分21.2に圧力を加えることにより、変形例Dのホルダ装置の可動顎部11をその閉位置からその開位置へ動かす。
変形例Aのホルダ装置はこうして容器を変形例Dのホルダ装置から解放する。
すなわち、次いで変形例Aのホルダ装置だけが容器上にクランプされ、この容器は第2プラットフォーム102の周りを動くことによって設備内のその経路を進み続けることができる。
第3プラットフォーム103のこの変形例Bのホルダ装置の不動顎部10の自由端と、変形例Aのホルダ装置の可動顎部11とが重なり合い、そして変形例Bのホルダ装置の可動顎部11は容器の周縁によって、経路に沿って動く容器の作用下で閉位置から開位置へ動かされる。
変形例Bのホルダ装置の板ばね16は次いで、変形例Bのホルダ装置の可動顎部11を閉位置へもたらすので、第2プラットフォームと第3プラットフォームとの接点(図3)で、変形例A及び変形例B双方のホルダ装置が容器上にクランプされ、ひいてはこれらホルダ装置のそれぞれが容器を保持することができる。
変形例Aのホルダ装置のペグ30は変形例Bのホルダ装置の駆動フィンガ22の部分22.1と接触する。
変形例A及び変形例Bのホルダ装置が接点から離れるに従って、ペグ30が駆動フィンガ22の部分22.1に圧力を加えるので、ペグ30は変形例Bのホルダ装置の可動顎部11をその閉位置に保持するのに対して、変形例Aのホルダ装置の可動顎部11は周縁によって、第3プラットフォーム103の周りの経路に沿って動く容器の作用下で閉位置から開位置へ動かされる。
こうして変形例Bのホルダ装置だけが容器上にクランプされ、この容器は第3プラットフォーム103の周りを動くことによって設備内のその経路に追従し続けることができる。
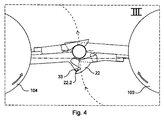
変形例Cのホルダ装置の板ばね16は次いで、変形例Cのホルダ装置の可動顎部11を閉位置へもたらすので、第3プラットフォーム103と第4プラットフォーム104との接点(図4)で、変形例B及び変形例C双方のホルダ装置が容器上にクランプされる。
変形例B及び変形例Cのホルダ装置が接点から離れるに従って、変形例Cのペグ33が駆動フィンガ22の部分22.2に圧力を加えるので、ペグ33は変形例Bのホルダ装置の可動顎部11をその閉位置から開位置へ動かす。
結果として、変形例Cのホルダ装置だけが容器上にクランプされ、この容器は第4プラットフォーム104の周りを動くことによって設備内のその経路に追従し続けることができる。
変形例Dのホルダ装置の板ばね16は次いで、変形例Dのホルダ装置の可動顎部を閉位置へもたらすので、第4プラットフォーム104と第5プラットフォーム105との接点(図5)で、変形例C及び変形例D双方のホルダ装置が容器上にクランプされる。
ペグ33が駆動フィンガ21の部分21.2に圧力を加えることにより、変形例Dのホルダ装置の可動顎部11を閉位置に保持する。
変形例Cのホルダ装置の可動顎部11は周縁によって、運動する容器の作用下で閉位置から開位置へ動かされる。
こうして変形例Dのホルダ装置だけが容器上にクランプされ、取り外し装置によって取り外される前に、この容器は第5プラットフォーム105の周りを動くことによって設備内のその経路に追従し続けることができる。
具体的には、各ペグが、上流側のプラットフォームのホルダ装置の可動顎部11を開くのを可能にし、そして、下流側のプラットフォームのホルダ装置の可動顎部11を閉じたままにするのを可能にする。したがって、ホルダ装置の各変形例は、ホルダ装置の2つの他の変形例と協働するように構成されている。
さらに、可動顎部11を対応プラットフォームに結合する必要がなく、これにより、可動顎部11の構造、及び不動顎部10の構造を大幅に単純化する。
この例における可動顎部11及び不動顎部10はこのようにほぼ平面状の形状である。さらに、可動顎部11は長さが比較的短く、これにより板ばね16による安定化及び案内を簡単にする。
「比較的短い」という用語は、可動顎部11の長さが不動顎部10の長さの2分の1〜3分の1であることを意味するために使用される。
さらに、ホルダ装置は容器の周縁を介する以外の形で容器を保持するのに役立つことができ、例えば容器はそれらのボディで保持されてもよい。
例えば設備は変形例Aのホルダ装置及び変形例Bのホルダ装置だけを使用する唯2つのプラットフォームを有することもできる。
図10〜13が示す変形例において、協働手段は、上記のペグ−フィンガ配列に代わる突起−フィンガ配列を含んでいる。
変形例Fのホルダ装置の協働手段は、可動顎部211の一方の端部に結合されたフィンガ221を含む。これによりフィンガ221は、可動顎部211が延びる平面に対して平行な平面内に延びる。
変形例Gのホルダ装置の協働手段は平面突起232を含んでいる。平面突起232は不動顎部210の自由端によって直接に形成されている。
変形例Hのホルダ装置の協働手段は、可動顎部211の一方の端部に結合されたフィンガ221を含む。これによりフィンガ221は、可動顎部211が延びる平面に対して平行な平面内に延びる。
ホルダ装置の閉鎖は、板ばね以外の弾性エレメント、例えば圧縮ばね又はねじりばねによって制御されてよい。
他の用途における1つの変形例では、ホルダ装置はプラスチック材料から形成された部分を含むこともできる。
Claims (12)
- 容器を処理する設備であって、前記設備が少なくとも:
第1顎部対を含む少なくとも第1ホルダ装置を有する第1プラットフォーム(101,102,103,104,105)と;
第2顎部対を含む少なくとも第2ホルダ装置を有する第2プラットフォーム(101,102,103,104,105)と、を含み、
各顎部対が、
不動顎部(10,210)と、
容器を保持するための閉位置と前記容器を解放するための開位置との間で運動可能な可動顎部(11,211)と、
前記可動顎部を前記閉位置に向かって推進するように配置された弾性エレメント(16,216)と、を含み、
前記設備は、
2つの顎部対が協働手段(21,22,30,33,221,232,240)を備えることにより、前記顎部対が動作中に、前記顎部対間の協働によって1つのプラットフォームから別のプラットフォームへ容器を移すのを可能にし、
前記顎部対のうちの一方が、他方の顎部対の可動顎部の、対応する不動顎部に対する運動に作用し得るように、前記協働手段が構成されている、
ことを特徴とする容器を処理する設備。 - 前記協働手段が、
前記顎部対のうちの一方の顎部対の不動顎部(10)上に配置されたペグ(30,33)と、
他方の顎部対の可動顎部(11)上に配置された駆動フィンガ(21,22)と、
を含み、
前記ペグが、前記プラットフォーム間の接点の近くで前記駆動フィンガと接触するようになっている、
ことを特徴とする請求項1に記載の設備。 - 前記ペグと前記駆動フィンガとの協働により、前記駆動フィンガを備えた前記可動顎部が閉位置から開位置へ動かされるように、前記ペグ(30,33)と前記駆動フィンガ(21,22)とが配置されている、
ことを特徴とする請求項2に記載の設備。 - 前記ペグと前記駆動フィンガとの協働により、前記駆動フィンガを備えた前記可動顎部が閉位置でブロックされるように、前記ペグ(30,33)と前記駆動フィンガ(21,22)とが配置されている、
ことを特徴とする請求項2に記載の設備。 - 前記可動顎部(11)の自由端が前記駆動フィンガ(21,22)を形成する、ことを特徴とする請求項2に記載の設備。
- 前記ペグ(30,33)が前記不動顎部(10)の自由端に配置されている、ことを特徴とする請求項2に記載の設備。
- 前記ペグ(30,33)が、これが配置されている前記不動顎部(10)から鉛直方向に延びている、ことを特徴とする請求項2に記載の設備。
- 前記協働手段が、
前記顎部対のうちの一方の顎部対の不動顎部(210)上に配置された平面突起(232,240)と、
他方の顎部対の可動顎部(11)上に配置された駆動フィンガ(221)と、
を含み、
前記突起が、前記プラットフォーム間の接点の近くで前記駆動フィンガと接触するようになっている、
ことを特徴とする請求項1に記載の設備。 - 前記突起と前記駆動フィンガとの協働により、前記駆動フィンガを備えた前記可動顎部が閉位置から開位置へ動かされるように、前記突起(232,240)と前記駆動フィンガ(221)とが配置されている、
ことを特徴とする請求項8に記載の設備。 - 前記不動顎部が前記対応プラットフォームと一体的に形成されている、ことを特徴とする請求項1に記載の設備。
- 各ホルダ装置が前記対応プラットフォームの底面に締め付けられており、
前記底面とは反対側の前記プラットフォームの上面が、前記対応ホルダ装置に向かって下向きに傾斜している、
ことを特徴とする請求項1に記載の設備。 - 前記弾性エレメント(16)が、前記不動顎部(10)に固定された1つの端部と、前記可動顎部を担持するために前記可動顎部(11)に固定された別の端部とを有する板ばねである、
ことを特徴とする請求項1に記載の設備。
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| FR1353750 | 2013-04-24 | ||
| FR1353750A FR3004981B1 (fr) | 2013-04-24 | 2013-04-24 | Installation de traitement de recipients comprenant des dispositifs de maintien configures pour cooperer ensemble |
| PCT/EP2014/056237 WO2014173620A1 (fr) | 2013-04-24 | 2014-03-27 | Installation de traitement de recipients comprenant des dispositifs de maintien configures pour cooperer ensemble |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2016516648A JP2016516648A (ja) | 2016-06-09 |
| JP6204569B2 true JP6204569B2 (ja) | 2017-09-27 |
Family
ID=49322464
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2016509353A Active JP6204569B2 (ja) | 2013-04-24 | 2014-03-27 | 相互に協働するように構成されたホルダ装置を含む容器処理設備 |
Country Status (6)
| Country | Link |
|---|---|
| US (1) | US9371192B2 (ja) |
| EP (1) | EP2989032B1 (ja) |
| JP (1) | JP6204569B2 (ja) |
| BR (1) | BR112015024430B1 (ja) |
| FR (1) | FR3004981B1 (ja) |
| WO (1) | WO2014173620A1 (ja) |
Families Citing this family (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| FR3004982B1 (fr) * | 2013-04-24 | 2015-05-01 | Serac Group | Dispositif de maintien d'un recipient comprenant une lame ressort et installation de traitement de recipients comprenant un tel dispositif |
| FR3023278B1 (fr) * | 2014-07-02 | 2016-08-12 | Serac Group | Installation de transport de recipients |
| DE102015106103B4 (de) | 2015-04-21 | 2018-01-18 | Khs Gmbh | Behältergreifer sowie Transportvorrichtung zum Transportieren von Behältern |
| DE102016106378A1 (de) * | 2016-04-07 | 2017-10-12 | Krones Ag | Vorrichtung zum Behandeln von Behältern sowie Getränkeabfüllanlage |
| FR3083731A1 (fr) * | 2018-07-11 | 2020-01-17 | Sidel Participations | Dispositif de transfert de corps creux equipe d'un outil de nettoyage |
Family Cites Families (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| FR2824542B3 (fr) * | 2001-05-09 | 2003-06-13 | Rosebud Consulting Ltd | Pince de prehension de recipients et procede de transport correspondant |
| DE10146118A1 (de) * | 2001-09-19 | 2003-04-03 | Khs Masch & Anlagenbau Ag | Transportvorrichtung |
| PT1939117E (pt) * | 2006-12-29 | 2009-11-06 | Sidel Holdings & Technology Sa | Aparelho para transportar recipientes com secção transversal não circular |
| JP5208645B2 (ja) * | 2008-09-26 | 2013-06-12 | 三菱重工食品包装機械株式会社 | 円形断面容器の搬送方法および装置 |
| FR2945800A1 (fr) * | 2009-05-20 | 2010-11-26 | Serac Group | Procede de transport de recipients par support partiel de ceux-ci et installation mettant en oeuvre ce procede |
-
2013
- 2013-04-24 FR FR1353750A patent/FR3004981B1/fr active Active
-
2014
- 2014-03-27 BR BR112015024430-0A patent/BR112015024430B1/pt active IP Right Grant
- 2014-03-27 WO PCT/EP2014/056237 patent/WO2014173620A1/fr active Application Filing
- 2014-03-27 JP JP2016509353A patent/JP6204569B2/ja active Active
- 2014-03-27 EP EP14714980.1A patent/EP2989032B1/fr active Active
- 2014-04-24 US US14/261,145 patent/US9371192B2/en active Active
Also Published As
| Publication number | Publication date |
|---|---|
| EP2989032A1 (fr) | 2016-03-02 |
| FR3004981A1 (fr) | 2014-10-31 |
| FR3004981B1 (fr) | 2015-05-01 |
| US9371192B2 (en) | 2016-06-21 |
| JP2016516648A (ja) | 2016-06-09 |
| BR112015024430A2 (pt) | 2017-07-18 |
| US20140318079A1 (en) | 2014-10-30 |
| BR112015024430B1 (pt) | 2021-07-20 |
| EP2989032B1 (fr) | 2017-05-03 |
| WO2014173620A1 (fr) | 2014-10-30 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6204569B2 (ja) | 相互に協働するように構成されたホルダ装置を含む容器処理設備 | |
| JP6367919B2 (ja) | 容器を保持するための装置及びこのような装置を具備する容器を処理するための設備 | |
| KR101453809B1 (ko) | 그리퍼 | |
| TWI429579B (zh) | 從一旋轉機器連續的移動可撓性容器至一輸送帶的設備及方法 | |
| CA2060653C (en) | Gripper clamp and machine for treating objects, particularly bottles equipped therewith | |
| JP3746820B2 (ja) | 容器洗浄機 | |
| JP2012504532A (ja) | 容器を位置決めするための方法及び装置、並びに様々な断面を有する容器を取り扱うためのプラント | |
| US9193538B2 (en) | Gripping arm for a gripper device | |
| US20110109110A1 (en) | Resilient clamp for holding a container by the neck | |
| IT1394320B1 (it) | Macchina per trattare contenitori, in particolare in un impianto di imbottigliamento di prodotti alimentari | |
| EP2825323B1 (en) | Container rinsing system and method of its assembling | |
| JP2016517833A5 (ja) | ||
| JP6893884B2 (ja) | パウチを移動させるためのシステムおよび方法 | |
| JP2005511444A (ja) | 指向された気体供給を有するハウジングを備えた充填デバイス | |
| US20110182710A1 (en) | Device for swiveling a bottle which is conveyed in a gripper | |
| JP6904362B2 (ja) | 1つ以上の洗浄機のために容器の供給/回収を行う組立体 | |
| RU2408510C2 (ru) | Устройство для обработки эластичных рукавных элементов, в частности пакетов | |
| CN112009983A (zh) | 用于将盖定位在容器上的定位装置 | |
| JP2009120289A (ja) | 食品容器供給装置 | |
| JP3432796B2 (ja) | 基板スピン装置 | |
| JP2010285197A (ja) | 電子線照射型キャップ殺菌装置 | |
| NL2015323B1 (en) | A crate washing device having lateral guiding means and a method. | |
| AU2003236215A1 (en) | Surface-cleaning machine | |
| CN111153371A (zh) | 翻转机构及翻转方法 | |
| JP2002533921A (ja) | 基板を処理するための装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20160927 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20161004 |
|
| A601 | Written request for extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A601 Effective date: 20161227 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20170801 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20170831 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 6204569 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |