JP6200421B2 - 運転支援システム及び運転支援方法 - Google Patents
運転支援システム及び運転支援方法 Download PDFInfo
- Publication number
- JP6200421B2 JP6200421B2 JP2014525822A JP2014525822A JP6200421B2 JP 6200421 B2 JP6200421 B2 JP 6200421B2 JP 2014525822 A JP2014525822 A JP 2014525822A JP 2014525822 A JP2014525822 A JP 2014525822A JP 6200421 B2 JP6200421 B2 JP 6200421B2
- Authority
- JP
- Japan
- Prior art keywords
- information
- driving
- vehicle
- time series
- pattern
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
- 238000000034 method Methods 0.000 title claims description 55
- 238000004891 communication Methods 0.000 claims description 45
- 238000012545 processing Methods 0.000 claims description 33
- 230000007704 transition Effects 0.000 claims description 21
- 230000007613 environmental effect Effects 0.000 claims description 8
- 230000008569 process Effects 0.000 description 26
- 230000008859 change Effects 0.000 description 15
- 238000010586 diagram Methods 0.000 description 13
- 230000006399 behavior Effects 0.000 description 8
- 238000003384 imaging method Methods 0.000 description 8
- 238000004364 calculation method Methods 0.000 description 6
- 230000001133 acceleration Effects 0.000 description 5
- 238000001514 detection method Methods 0.000 description 5
- 230000006870 function Effects 0.000 description 5
- 239000000284 extract Substances 0.000 description 4
- 230000008921 facial expression Effects 0.000 description 3
- 230000000007 visual effect Effects 0.000 description 3
- 208000032140 Sleepiness Diseases 0.000 description 2
- 206010041349 Somnolence Diseases 0.000 description 2
- 230000036772 blood pressure Effects 0.000 description 2
- 238000000605 extraction Methods 0.000 description 2
- 238000012423 maintenance Methods 0.000 description 2
- 238000010295 mobile communication Methods 0.000 description 2
- 230000003183 myoelectrical effect Effects 0.000 description 2
- 238000000059 patterning Methods 0.000 description 2
- 230000037321 sleepiness Effects 0.000 description 2
- 238000013179 statistical model Methods 0.000 description 2
- 230000002123 temporal effect Effects 0.000 description 2
- 238000012935 Averaging Methods 0.000 description 1
- 101001093748 Homo sapiens Phosphatidylinositol N-acetylglucosaminyltransferase subunit P Proteins 0.000 description 1
- 238000013459 approach Methods 0.000 description 1
- 230000037007 arousal Effects 0.000 description 1
- 238000013528 artificial neural network Methods 0.000 description 1
- 230000036760 body temperature Effects 0.000 description 1
- 230000007177 brain activity Effects 0.000 description 1
- 230000003727 cerebral blood flow Effects 0.000 description 1
- 238000013461 design Methods 0.000 description 1
- 230000002068 genetic effect Effects 0.000 description 1
- 230000007794 irritation Effects 0.000 description 1
- 238000010801 machine learning Methods 0.000 description 1
- 239000011159 matrix material Substances 0.000 description 1
- 238000005259 measurement Methods 0.000 description 1
- 238000012986 modification Methods 0.000 description 1
- 230000004048 modification Effects 0.000 description 1
- 238000012544 monitoring process Methods 0.000 description 1
- 230000000877 morphologic effect Effects 0.000 description 1
- 230000003287 optical effect Effects 0.000 description 1
- 230000002093 peripheral effect Effects 0.000 description 1
- 230000029058 respiratory gaseous exchange Effects 0.000 description 1
- 230000011218 segmentation Effects 0.000 description 1
- 238000001228 spectrum Methods 0.000 description 1
- 230000035900 sweating Effects 0.000 description 1
- 230000008685 targeting Effects 0.000 description 1
- 230000009466 transformation Effects 0.000 description 1
Images















Classifications
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01C—MEASURING DISTANCES, LEVELS OR BEARINGS; SURVEYING; NAVIGATION; GYROSCOPIC INSTRUMENTS; PHOTOGRAMMETRY OR VIDEOGRAMMETRY
- G01C21/00—Navigation; Navigational instruments not provided for in groups G01C1/00 - G01C19/00
- G01C21/38—Electronic maps specially adapted for navigation; Updating thereof
- G01C21/3804—Creation or updating of map data
- G01C21/3833—Creation or updating of map data characterised by the source of data
- G01C21/3848—Data obtained from both position sensors and additional sensors
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01C—MEASURING DISTANCES, LEVELS OR BEARINGS; SURVEYING; NAVIGATION; GYROSCOPIC INSTRUMENTS; PHOTOGRAMMETRY OR VIDEOGRAMMETRY
- G01C21/00—Navigation; Navigational instruments not provided for in groups G01C1/00 - G01C19/00
- G01C21/26—Navigation; Navigational instruments not provided for in groups G01C1/00 - G01C19/00 specially adapted for navigation in a road network
- G01C21/34—Route searching; Route guidance
- G01C21/36—Input/output arrangements for on-board computers
- G01C21/3626—Details of the output of route guidance instructions
- G01C21/3635—Guidance using 3D or perspective road maps
- G01C21/3638—Guidance using 3D or perspective road maps including 3D objects and buildings
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01C—MEASURING DISTANCES, LEVELS OR BEARINGS; SURVEYING; NAVIGATION; GYROSCOPIC INSTRUMENTS; PHOTOGRAMMETRY OR VIDEOGRAMMETRY
- G01C21/00—Navigation; Navigational instruments not provided for in groups G01C1/00 - G01C19/00
- G01C21/38—Electronic maps specially adapted for navigation; Updating thereof
- G01C21/3804—Creation or updating of map data
- G01C21/3833—Creation or updating of map data characterised by the source of data
- G01C21/3841—Data obtained from two or more sources, e.g. probe vehicles
-
- G—PHYSICS
- G08—SIGNALLING
- G08G—TRAFFIC CONTROL SYSTEMS
- G08G1/00—Traffic control systems for road vehicles
- G08G1/16—Anti-collision systems
- G08G1/166—Anti-collision systems for active traffic, e.g. moving vehicles, pedestrians, bikes
-
- G—PHYSICS
- G09—EDUCATION; CRYPTOGRAPHY; DISPLAY; ADVERTISING; SEALS
- G09B—EDUCATIONAL OR DEMONSTRATION APPLIANCES; APPLIANCES FOR TEACHING, OR COMMUNICATING WITH, THE BLIND, DEAF OR MUTE; MODELS; PLANETARIA; GLOBES; MAPS; DIAGRAMS
- G09B29/00—Maps; Plans; Charts; Diagrams, e.g. route diagram
- G09B29/10—Map spot or coordinate position indicators; Map reading aids
- G09B29/106—Map spot or coordinate position indicators; Map reading aids using electronic means
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W50/00—Details of control systems for road vehicle drive control not related to the control of a particular sub-unit, e.g. process diagnostic or vehicle driver interfaces
- B60W2050/0062—Adapting control system settings
- B60W2050/0075—Automatic parameter input, automatic initialising or calibrating means
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2540/00—Input parameters relating to occupants
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2556/00—Input parameters relating to data
- B60W2556/10—Historical data
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2556/00—Input parameters relating to data
- B60W2556/45—External transmission of data to or from the vehicle
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2556/00—Input parameters relating to data
- B60W2556/45—External transmission of data to or from the vehicle
- B60W2556/50—External transmission of data to or from the vehicle of positioning data, e.g. GPS [Global Positioning System] data
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2556/00—Input parameters relating to data
- B60W2556/45—External transmission of data to or from the vehicle
- B60W2556/55—External transmission of data to or from the vehicle using telemetry
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2556/00—Input parameters relating to data
- B60W2556/45—External transmission of data to or from the vehicle
- B60W2556/65—Data transmitted between vehicles
-
- G—PHYSICS
- G08—SIGNALLING
- G08G—TRAFFIC CONTROL SYSTEMS
- G08G1/00—Traffic control systems for road vehicles
- G08G1/01—Detecting movement of traffic to be counted or controlled
- G08G1/0104—Measuring and analyzing of parameters relative to traffic conditions
- G08G1/0108—Measuring and analyzing of parameters relative to traffic conditions based on the source of data
- G08G1/0112—Measuring and analyzing of parameters relative to traffic conditions based on the source of data from the vehicle, e.g. floating car data [FCD]
-
- G—PHYSICS
- G08—SIGNALLING
- G08G—TRAFFIC CONTROL SYSTEMS
- G08G1/00—Traffic control systems for road vehicles
- G08G1/01—Detecting movement of traffic to be counted or controlled
- G08G1/0104—Measuring and analyzing of parameters relative to traffic conditions
- G08G1/0125—Traffic data processing
- G08G1/0129—Traffic data processing for creating historical data or processing based on historical data
Landscapes
- Engineering & Computer Science (AREA)
- Remote Sensing (AREA)
- Radar, Positioning & Navigation (AREA)
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Automation & Control Theory (AREA)
- Theoretical Computer Science (AREA)
- Educational Technology (AREA)
- Educational Administration (AREA)
- Business, Economics & Management (AREA)
- Mathematical Physics (AREA)
- Traffic Control Systems (AREA)
- Instructional Devices (AREA)
- Navigation (AREA)
Description
本発明の第1実施形態として示す運転支援システムは、例えば図1に示すように構成されている。図1に示すように、この運転支援システムは、運転情報取得部1、車両位置情報取得部2、統計情報生成部3、地図情報生成部4、地図情報参照部5、運転支援部6、及び、地図情報記憶部7を含む。
つぎに、第2実施形態に係る運転支援システムについて説明する。なお、上述の第1実施形態と同様の部分については同一符号を付することによりその詳細な説明を省略する。

つぎに、第3実施形態に係る運転支援システムについて説明する。なお、上述の実施形態と同様の部分については同一符号を付することによりその詳細な説明を省略する。
つぎに、第4実施形態に係る運転支援システムについて説明する。なお、上述の実施形態と同様の部分については同一符号を付することによりその詳細な説明を省略する。
2 車両位置情報取得部
3 統計情報生成部
4 地図情報生成部
5 地図情報参照部
6 運転支援部
7 地図情報記憶部
8 属性付与部
11 運転者状態情報取得部
12 車両周囲情報取得部
13 車両情報取得部
41 統合パターン生成部
71 地図情報更新部
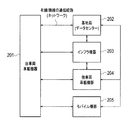
201 自車両車載機器
201a 通信部
201b 一時記憶部
202 基地局
202a 通信部
203 インフラ機器
204 他車両車載機器
205 モバイル機器
Claims (5)
- 運転者の操作量及び車両挙動、運転者の状態、車両周囲の環境情報の何れかを運転情報として取得する運転情報取得手段と、
車両の位置情報を取得する車両位置情報取得手段と、
前記運転情報を時系列パターンとして統計処理して、統計情報を生成する統計情報生成手段と、
時間的に前の運転情報のパターンから時間的に後の運転情報のパターンへの遷移確率を算出し、前記遷移確率と前記統計情報を、前記運転情報を取得した時の車両の位置情報と関連付ける情報関連づけ手段と、
前記車両位置情報取得手段によって取得された位置情報と前記遷移確率に基づいて、前記統計情報を参照して読み出す情報参照手段と、
前記情報参照手段によって読み出された統計情報に基づき、運転支援を行う運転支援手段と、
車両外の通信装置と情報を授受する通信手段とを有し、
前記運転情報取得手段は、前記通信手段により取得された情報を運転情報として利用するために、前記通信手段により取得された情報を運転情報として前記統計情報生成手段に供給し、
前記統計情報生成手段は、地図上の区間に関わりなく前記運転情報の時系列パターンを算出し、
前記統計情報生成手段により算出された時系列パターンが、予め設定された複数の時系列パターンのうち何れの時系列パターンに相当するかを判別するパターン判別手段を有し、
前記情報関連づけ手段は、前記パターン判別手段により判別された時系列パターンと前記運転情報とを関連付けることを特徴とする運転支援システム。 - 前記運転情報取得手段は、運転者の操作量及び車両挙動、運転者の状態、車両周囲の環境情報のうち複数の情報を取得し、
前記運転情報取得手段により取得された各運転情報を用いて算出される各時系列パターンを、同じ環境で取得された時系列パターンとして関連付ける統合パターン生成手段を有すること
を特徴とする請求項1に記載の運転支援システム。 - 前記統計情報生成手段は、地図上の区間ごとに前記運転情報を分割し、区間ごとに分割された運転情報を用いて区間ごとの時系列パターンを算出することを特徴とする請求項1又は請求項2に記載の運転支援システム。
- 前記運転情報取得手段により取得された運転情報に、当該運転情報に属性を付与する属性付与手段を有し、
前記統計情報生成手段は、前記属性付与手段により付与された属性ごとに、前記運転情報を時系列パターンとして統計処理を行うこと
を特徴とする請求項1乃至請求項3の何れか1項に記載の運転支援システム。 - 運転者の操作量及び車両挙動、運転者の状態、車両周囲の環境情報の何れかを運転情報として取得すると共に、車両の位置情報を取得し、
前記運転情報を時系列パターンとして統計処理して、統計情報を生成し、
時間的に前の運転情報のパターンから時間的に後の運転情報のパターンへの遷移確率を算出し、前記遷移確率と前記統計情報を、前記運転情報を取得した時の車両の位置情報と関連付け、
前記取得された車両の位置情報と前記遷移確率に基づいて、前記統計情報を参照して読み出し、
前記読み出された統計情報に基づき、運転支援を行い、
車両外の通信装置と情報を授受する通信手段により取得された情報を運転情報として利用するために、前記通信手段により取得された情報を運転情報として供給して前記統計情報を生成し、
地図上の区間に関わりなく前記運転情報の時系列パターンを算出し、
前記算出された時系列パターンが、予め設定された複数の時系列パターンのうち何れの時系列パターンに相当するかを判別し、
前記判別された時系列パターンと前記運転情報とを関連付けること
を特徴とする運転支援方法。
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2012158314 | 2012-07-17 | ||
| JP2012158314 | 2012-07-17 | ||
| PCT/JP2013/069294 WO2014013985A1 (ja) | 2012-07-17 | 2013-07-16 | 運転支援システム及び運転支援方法 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JPWO2014013985A1 JPWO2014013985A1 (ja) | 2016-06-30 |
| JP6200421B2 true JP6200421B2 (ja) | 2017-09-20 |
Family
ID=49948811
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2014525822A Active JP6200421B2 (ja) | 2012-07-17 | 2013-07-16 | 運転支援システム及び運転支援方法 |
Country Status (8)
| Country | Link |
|---|---|
| US (1) | US10161754B2 (ja) |
| EP (1) | EP2876620B1 (ja) |
| JP (1) | JP6200421B2 (ja) |
| CN (1) | CN104508719B (ja) |
| BR (1) | BR112015000983A2 (ja) |
| MX (1) | MX2015000832A (ja) |
| RU (1) | RU2015105174A (ja) |
| WO (1) | WO2014013985A1 (ja) |
Families Citing this family (98)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2014157359A1 (ja) * | 2013-03-28 | 2014-10-02 | 本田技研工業株式会社 | マップ生成システム、マップ生成装置、マップ生成方法およびプログラム |
| JP6433268B2 (ja) | 2014-03-31 | 2018-12-05 | 国立大学法人 東京大学 | 検査システムおよび検査方法 |
| JP6316068B2 (ja) * | 2014-03-31 | 2018-04-25 | 国立大学法人 東京大学 | 検査システムおよび検査方法 |
| EP3149723B1 (en) * | 2014-05-26 | 2023-07-05 | Telefonaktiebolaget LM Ericsson (publ) | Methods and network nodes for notifying vehicle drivers about their driving |
| JP6307356B2 (ja) * | 2014-06-06 | 2018-04-04 | 株式会社デンソー | 運転コンテキスト情報生成装置 |
| US9321461B1 (en) * | 2014-08-29 | 2016-04-26 | Google Inc. | Change detection using curve alignment |
| US9731713B2 (en) * | 2014-09-10 | 2017-08-15 | Volkswagen Ag | Modifying autonomous vehicle driving by recognizing vehicle characteristics |
| DE112015004218B4 (de) * | 2014-09-16 | 2019-05-23 | Honda Motor Co., Ltd. | Fahrassistenzvorrichtung |
| JP6432948B2 (ja) * | 2014-09-30 | 2018-12-05 | エイディシーテクノロジー株式会社 | 自動運転制御装置 |
| JP6464992B2 (ja) * | 2014-11-14 | 2019-02-06 | 株式会社デンソー | 運転データ収集システム |
| JP6358051B2 (ja) * | 2014-11-14 | 2018-07-18 | 株式会社デンソー | 遷移予測データ生成装置および遷移予測装置 |
| CN105810013A (zh) * | 2014-12-30 | 2016-07-27 | 中国移动通信集团公司 | 一种基于车群风险的车辆防撞控制方法和装置 |
| CN104820424B (zh) * | 2015-05-15 | 2017-12-01 | 山东省计算中心(国家超级计算济南中心) | 基于北斗导航的电动汽车自动驾驶系统及其控制方法 |
| CN104952123A (zh) * | 2015-05-27 | 2015-09-30 | 关晓芙 | 安装在车辆中的车载设备及相关设备与方法 |
| JP6439591B2 (ja) | 2015-05-31 | 2018-12-19 | 株式会社デンソー | 走行制御装置、走行制御方法 |
| JP5945999B1 (ja) * | 2015-07-31 | 2016-07-05 | パナソニックIpマネジメント株式会社 | 運転支援装置、運転支援システム、運転支援方法、運転支援プログラム及び自動運転車両 |
| CN105059288B (zh) * | 2015-08-11 | 2017-10-20 | 奇瑞汽车股份有限公司 | 一种车道保持控制系统及方法 |
| JP6915542B2 (ja) * | 2015-09-30 | 2021-08-04 | 日本電気株式会社 | 情報処理装置、通知システム、情報送信方法及びプログラム |
| DE102016205436A1 (de) * | 2015-11-25 | 2017-06-01 | Volkswagen Aktiengesellschaft | Verfahren und System zum Erstellen einer digitalen Karte |
| DE102016205434A1 (de) * | 2015-11-25 | 2017-06-01 | Volkswagen Aktiengesellschaft | Verfahren und System zum Erstellen einer spurgenauen Belegungskarte für Fahrspuren |
| US11663508B1 (en) * | 2015-12-15 | 2023-05-30 | Lytx, Inc. | Environmental condition-based risk level |
| US10165171B2 (en) | 2016-01-22 | 2018-12-25 | Coban Technologies, Inc. | Systems, apparatuses, and methods for controlling audiovisual apparatuses |
| DE102017101343A1 (de) * | 2016-01-26 | 2017-07-27 | GM Global Technology Operations LLC | Systeme und verfahren zur fahrzeugsystemsteuerung auf grundlage physiologischer merkmale |
| CN105691230A (zh) * | 2016-03-06 | 2016-06-22 | 王保亮 | 全自动导航式无人驾驶电动汽车 |
| CN105629977A (zh) * | 2016-03-06 | 2016-06-01 | 王保亮 | 一种全自动导航式无人驾驶电动汽车的使用方法 |
| CN107200022B (zh) * | 2016-03-15 | 2019-11-12 | 奥迪股份公司 | 驾驶辅助系统和方法 |
| KR20170109275A (ko) * | 2016-03-21 | 2017-09-29 | 현대자동차주식회사 | 차량 및 그 제어 방법 |
| JP6214796B1 (ja) * | 2016-03-30 | 2017-10-18 | 三菱電機株式会社 | 走行計画生成装置、走行計画生成方法及び走行計画生成プログラム |
| JP6790417B2 (ja) * | 2016-03-31 | 2020-11-25 | ソニー株式会社 | 情報処理装置及び情報処理サーバ |
| JP6745334B2 (ja) | 2016-04-08 | 2020-08-26 | 本田技研工業株式会社 | 車両制御システム、車両制御方法、および車両制御プログラム |
| WO2017179151A1 (ja) * | 2016-04-13 | 2017-10-19 | 本田技研工業株式会社 | 車両制御システム、車両制御方法、および車両制御プログラム |
| JP6439735B2 (ja) | 2016-04-14 | 2018-12-19 | トヨタ自動車株式会社 | 運転支援用装置 |
| JP6493282B2 (ja) | 2016-04-14 | 2019-04-03 | トヨタ自動車株式会社 | サーバー及び情報提供装置 |
| US11169537B2 (en) | 2016-04-15 | 2021-11-09 | Honda Motor Co., Ltd. | Providing driving support in response to changes in driving environment |
| US10789840B2 (en) * | 2016-05-09 | 2020-09-29 | Coban Technologies, Inc. | Systems, apparatuses and methods for detecting driving behavior and triggering actions based on detected driving behavior |
| US10152858B2 (en) | 2016-05-09 | 2018-12-11 | Coban Technologies, Inc. | Systems, apparatuses and methods for triggering actions based on data capture and characterization |
| US10370102B2 (en) | 2016-05-09 | 2019-08-06 | Coban Technologies, Inc. | Systems, apparatuses and methods for unmanned aerial vehicle |
| US11222438B2 (en) * | 2016-05-27 | 2022-01-11 | Kabushiki Kaisha Toshiba | Information processing apparatus, vehicle, and information processing method for presence probability of object |
| US11132611B2 (en) * | 2016-05-27 | 2021-09-28 | Kabushiki Kaisha Toshiba | Information processing apparatus and information processing method for determining presence probability of object |
| WO2017208529A1 (ja) * | 2016-06-02 | 2017-12-07 | オムロン株式会社 | 運転者状態推定装置、運転者状態推定システム、運転者状態推定方法、運転者状態推定プログラム、対象者状態推定装置、対象者状態推定方法、対象者状態推定プログラム、および記録媒体 |
| CN106080590B (zh) * | 2016-06-12 | 2018-04-03 | 百度在线网络技术(北京)有限公司 | 车辆控制方法和装置以及决策模型的获取方法和装置 |
| US10007854B2 (en) * | 2016-07-07 | 2018-06-26 | Ants Technology (Hk) Limited | Computer vision based driver assistance devices, systems, methods and associated computer executable code |
| DE102016214257A1 (de) * | 2016-08-02 | 2018-02-08 | Continental Teves Ag & Co. Ohg | Verfahren zum Bereitstellen einer Karte in einem Fahrzeug |
| CN106326873B (zh) * | 2016-08-29 | 2019-04-16 | 吉林大学 | Cacc驾驶员肢体肌电信号表征的操纵意图预测方法 |
| US9739627B1 (en) | 2016-10-18 | 2017-08-22 | Allstate Insurance Company | Road frustration index risk mapping and mitigation |
| US10830605B1 (en) | 2016-10-18 | 2020-11-10 | Allstate Insurance Company | Personalized driving risk modeling and estimation system and methods |
| CN106611481B (zh) * | 2016-11-02 | 2018-12-25 | 纳智源科技(唐山)有限责任公司 | 疲劳驾驶监控装置及可穿戴设备 |
| CN113114966B (zh) * | 2016-11-18 | 2024-04-26 | Jvc建伍株式会社 | 记录装置、记录方法、再现方法以及存储介质 |
| US20190347512A1 (en) * | 2017-01-02 | 2019-11-14 | Visteon Global Technologies, Inc. | Employing vehicular sensor information for retrieval of data |
| US10380886B2 (en) | 2017-05-17 | 2019-08-13 | Cavh Llc | Connected automated vehicle highway systems and methods |
| EP3348964A1 (de) | 2017-01-13 | 2018-07-18 | Carrosserie Hess AG | Verfahren zur vorhersage zukünftiger fahrbedingungen für ein fahrzeug |
| DE102017100671A1 (de) * | 2017-01-16 | 2018-07-19 | Voith Patent Gmbh | Verfahren zur Optimierung einer Schaltstrategie |
| JP6528797B2 (ja) * | 2017-03-30 | 2019-06-12 | トヨタ自動車株式会社 | 車載ミリ波通信装置および通信方法 |
| JP7016351B2 (ja) * | 2017-03-31 | 2022-02-14 | 本田技研工業株式会社 | 車載装置、情報管理サーバ、情報管理システム、および方法 |
| JP6686959B2 (ja) * | 2017-04-11 | 2020-04-22 | 株式会社デンソー | 車両用報知装置 |
| US10692365B2 (en) | 2017-06-20 | 2020-06-23 | Cavh Llc | Intelligent road infrastructure system (IRIS): systems and methods |
| US12008893B2 (en) | 2017-05-17 | 2024-06-11 | Cavh Llc | Autonomous vehicle (AV) control system with roadside unit (RSU) network |
| JP2018203214A (ja) * | 2017-06-09 | 2018-12-27 | アイシン精機株式会社 | 駐車支援装置、駐車支援方法、運転支援装置、および運転支援方法 |
| JP6817685B2 (ja) * | 2017-07-07 | 2021-01-20 | Kddi株式会社 | 運転車両信号から個人特性を特定しやすい道路区間を推定する推定装置、プログラム及び方法 |
| WO2019008755A1 (ja) * | 2017-07-07 | 2019-01-10 | マクセル株式会社 | 情報処理システム及びそれに用いる情報処理システムインフラ及び情報処理方法 |
| JP6309146B1 (ja) * | 2017-07-26 | 2018-04-11 | 学校法人五島育英会 | 移動体データ処理装置、方法及びコンピュータプログラム |
| JP7013722B2 (ja) * | 2017-08-22 | 2022-02-01 | 株式会社デンソー | 運転支援装置 |
| CN107704870B (zh) * | 2017-09-07 | 2021-04-20 | 武汉大学 | 基于ble指纹定位与imu动作识别融合的可靠人车临近感知装置与方法 |
| JP6928722B2 (ja) * | 2017-10-24 | 2021-09-01 | ニッサン ノース アメリカ,インク | 車両動作のための位置特定の決定 |
| EP3495220B1 (en) * | 2017-12-11 | 2024-04-03 | Volvo Car Corporation | Path prediction for a vehicle |
| CN109993966A (zh) * | 2018-01-02 | 2019-07-09 | 中国移动通信有限公司研究院 | 一种构建用户画像的方法及装置 |
| EP3750145A4 (en) * | 2018-02-06 | 2022-02-16 | Cavh Llc | INTELLIGENT ROAD INFRASTRUCTURE SYSTEM (IRIS): SYSTEMS AND PROCEDURES |
| CN108600938B (zh) * | 2018-03-29 | 2020-09-22 | 南京邮电大学 | 一种车联网中感知服务节点智能选择方法 |
| DE102018205199B4 (de) * | 2018-04-06 | 2021-03-18 | Volkswagen Aktiengesellschaft | Ermittlung und Verwendung von Haltepunkten für Kraftfahrzeuge |
| CA3096472A1 (en) | 2018-05-09 | 2019-11-14 | Cavh Llc | Systems and methods for driving intelligence allocation between vehicles and highways |
| US11842642B2 (en) | 2018-06-20 | 2023-12-12 | Cavh Llc | Connected automated vehicle highway systems and methods related to heavy vehicles |
| CN110634324A (zh) * | 2018-06-22 | 2019-12-31 | 上海擎感智能科技有限公司 | 一种基于车载终端的礼让行人的提醒方法、系统及车载终端 |
| US12057011B2 (en) | 2018-06-28 | 2024-08-06 | Cavh Llc | Cloud-based technology for connected and automated vehicle highway systems |
| WO2020014227A1 (en) | 2018-07-10 | 2020-01-16 | Cavh Llc | Route-specific services for connected automated vehicle highway systems |
| WO2020014224A1 (en) | 2018-07-10 | 2020-01-16 | Cavh Llc | Fixed-route service system for cavh systems |
| KR102677702B1 (ko) * | 2018-09-11 | 2024-06-25 | 현대자동차주식회사 | 차량 및 그 제어방법 |
| CN112703541B (zh) * | 2018-09-17 | 2022-09-20 | 日产自动车株式会社 | 车辆行为预测方法以及车辆行为预测装置 |
| AT521724A1 (de) | 2018-09-24 | 2020-04-15 | Avl List Gmbh | Verfahren und Vorrichtung zur Analyse eines Sensordatenstroms sowie Verfahren zum Führen eines Fahrzeugs |
| JP7147448B2 (ja) * | 2018-10-10 | 2022-10-05 | トヨタ自動車株式会社 | 地図情報システム |
| CN109376682A (zh) * | 2018-11-06 | 2019-02-22 | 东莞市凯木金电子科技有限公司 | 一种智能摄像头及疲劳状态识别方法 |
| CN109540162B (zh) * | 2018-11-12 | 2021-12-21 | 北京四维图新科技股份有限公司 | Adas地图数据的处理方法、获取方法、装置及车载设备 |
| CN111413957B (zh) | 2018-12-18 | 2021-11-02 | 北京航迹科技有限公司 | 用于确定自动驾驶中的驾驶动作的系统和方法 |
| DE102019203739A1 (de) * | 2018-12-20 | 2020-06-25 | Continental Automotive Gmbh | Datenspeicher, Recheneinheit und Verfahren zum Ausführen einer Funktion eines Fahrzeuges |
| JP7238393B2 (ja) * | 2018-12-25 | 2023-03-14 | 株式会社デンソー | 地図データ生成装置、地図データ生成システム、地図データ生成プログラム及び記憶媒体 |
| CN109774492B (zh) * | 2018-12-29 | 2021-06-22 | 江苏大学 | 一种基于未来驱动功率需求的纯电动汽车整车功率分配方法 |
| CN109808705B (zh) * | 2019-01-23 | 2021-11-02 | 青岛慧拓智能机器有限公司 | 一种用于远程遥控驾驶控制的系统 |
| JP2020144332A (ja) * | 2019-03-08 | 2020-09-10 | トヨタ自動車株式会社 | 仮想現実システムおよび仮想現実方法 |
| WO2020188691A1 (ja) * | 2019-03-18 | 2020-09-24 | 三菱電機株式会社 | 車載機器及び通信方法 |
| TWI715958B (zh) * | 2019-04-08 | 2021-01-11 | 國立交通大學 | 評估駕駛者之疲勞分數的方法 |
| KR20200135630A (ko) * | 2019-05-23 | 2020-12-03 | 현대자동차주식회사 | 자율 주행 차량의 제어장치 및 그 방법 |
| JP7269103B2 (ja) * | 2019-06-05 | 2023-05-08 | 日立Astemo株式会社 | 電子制御装置、制御方法、自動運転システム |
| US11142214B2 (en) | 2019-08-06 | 2021-10-12 | Bendix Commercial Vehicle Systems Llc | System, controller and method for maintaining an advanced driver assistance system as active |
| CN110689642B (zh) * | 2019-09-18 | 2020-10-09 | 山东大学 | 基于车载obd数据及概率统计的异常驾驶判别方法及系统 |
| CN112309117A (zh) * | 2020-10-30 | 2021-02-02 | 上海炬宏信息技术有限公司 | 一种基于密度聚类的交通事件融合系统和方法 |
| US11718314B1 (en) * | 2022-03-11 | 2023-08-08 | Aptiv Technologies Limited | Pedestrian alert system |
| GB2618341B (en) * | 2022-05-03 | 2024-09-04 | Oxa Autonomy Ltd | Controlling an autonomous vehicle |
| CN115346362B (zh) * | 2022-06-10 | 2024-04-09 | 斑马网络技术有限公司 | 行车数据处理方法、装置、电子设备及存储介质 |
| CN116486606B (zh) * | 2023-03-07 | 2023-11-24 | 智能网联汽车(山东)协同创新研究院有限公司 | 一种智能网联车载终端中央控制系统 |
Family Cites Families (14)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP3769938B2 (ja) | 1998-03-10 | 2006-04-26 | 日産自動車株式会社 | レーンキープシステム |
| EP1380813B1 (en) | 2001-08-06 | 2012-05-02 | Panasonic Corporation | Information providing method and information providing device |
| JP4027838B2 (ja) | 2003-05-08 | 2007-12-26 | 独立行政法人科学技術振興機構 | 隠れマルコフモデルによる運動データの認識・生成方法、それを用いた運動制御方法及びそのシステム |
| JP2005196567A (ja) | 2004-01-08 | 2005-07-21 | Nissan Motor Co Ltd | 顔向き検出装置 |
| US7715961B1 (en) * | 2004-04-28 | 2010-05-11 | Agnik, Llc | Onboard driver, vehicle and fleet data mining |
| US7783417B2 (en) * | 2007-03-09 | 2010-08-24 | Mitac International Corporation | Methods and apparatus for determining a route having an estimated minimum fuel usage for a vehicle |
| JP4569837B2 (ja) | 2007-03-30 | 2010-10-27 | アイシン・エィ・ダブリュ株式会社 | 地物情報収集装置及び地物情報収集方法 |
| JP4427759B2 (ja) * | 2007-06-29 | 2010-03-10 | アイシン・エィ・ダブリュ株式会社 | 車両挙動学習装置及び車両挙動学習プログラム |
| WO2009098071A1 (de) * | 2008-02-08 | 2009-08-13 | FKFS Forschungsinstitut für Kraftfahrwesen und Fahrzeugmotoren Stuttgart | Vorrichtung und verfahren zur bereitstellung von informationen über fahrsituationen |
| CA2749685A1 (en) * | 2008-11-13 | 2010-05-20 | Aser Rich Limited | System and method for improved vehicle safety through enhanced situation awareness of a driver of a vehicle |
| JP5691145B2 (ja) * | 2009-08-10 | 2015-04-01 | ソニー株式会社 | 車両経路判定方法およびナビゲーション装置 |
| JP2011134207A (ja) * | 2009-12-25 | 2011-07-07 | Konica Minolta Holdings Inc | 運転記録装置および地図作成システム |
| DE102010048263A1 (de) | 2010-10-12 | 2011-05-19 | Daimler Ag | Verfahren und Vorrichtung zum Unterstützen eines Fahrers eines Fahrzeugs |
| CN201910918U (zh) * | 2010-12-30 | 2011-07-27 | 上海博泰悦臻电子设备制造有限公司 | 业务系统及车载终端 |
-
2013
- 2013-07-16 JP JP2014525822A patent/JP6200421B2/ja active Active
- 2013-07-16 BR BR112015000983A patent/BR112015000983A2/pt not_active IP Right Cessation
- 2013-07-16 RU RU2015105174A patent/RU2015105174A/ru not_active Application Discontinuation
- 2013-07-16 WO PCT/JP2013/069294 patent/WO2014013985A1/ja active Application Filing
- 2013-07-16 US US14/415,162 patent/US10161754B2/en active Active
- 2013-07-16 EP EP13819767.8A patent/EP2876620B1/en active Active
- 2013-07-16 CN CN201380037746.3A patent/CN104508719B/zh active Active
- 2013-07-16 MX MX2015000832A patent/MX2015000832A/es not_active Application Discontinuation
Also Published As
| Publication number | Publication date |
|---|---|
| RU2015105174A (ru) | 2016-09-10 |
| CN104508719A (zh) | 2015-04-08 |
| BR112015000983A2 (pt) | 2017-06-27 |
| US20150211868A1 (en) | 2015-07-30 |
| JPWO2014013985A1 (ja) | 2016-06-30 |
| EP2876620A1 (en) | 2015-05-27 |
| MX2015000832A (es) | 2015-04-08 |
| EP2876620B1 (en) | 2019-08-14 |
| CN104508719B (zh) | 2018-02-23 |
| US10161754B2 (en) | 2018-12-25 |
| WO2014013985A1 (ja) | 2014-01-23 |
| EP2876620A4 (en) | 2016-03-23 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6200421B2 (ja) | 運転支援システム及び運転支援方法 | |
| US11640174B2 (en) | Smart vehicle | |
| US10816993B1 (en) | Smart vehicle | |
| US10928830B1 (en) | Smart vehicle | |
| US11990036B2 (en) | Driver behavior monitoring | |
| US11380193B2 (en) | Method and system for vehicular-related communications | |
| US20200151479A1 (en) | Method and apparatus for providing driver information via audio and video metadata extraction | |
| US10769456B2 (en) | Systems and methods for near-crash determination | |
| Bila et al. | Vehicles of the future: A survey of research on safety issues | |
| US20240290201A1 (en) | Driver behavior monitoring | |
| US20150178572A1 (en) | Road surface condition classification method and system | |
| JP4900967B2 (ja) | 運転支援装置及び運転支援方法 | |
| JP4093026B2 (ja) | 道路環境情報通知装置、車載報知装置、情報センタ内装置、及び道路環境情報通知プログラム | |
| US20230048304A1 (en) | Environmentally aware prediction of human behaviors | |
| US20230134342A1 (en) | System and/or method for vehicle trip classification | |
| US20230303122A1 (en) | Vehicle of interest detection by autonomous vehicles based on amber alerts | |
| JP2023171455A (ja) | 経路予測装置、それを備えた車載装置、経路予測システム、経路予測方法、及びコンピュータプログラム | |
| CN117197834A (zh) | 基于图像的行人的速度估计 | |
| CN117416344A (zh) | 自主驾驶系统中校车的状态估计 | |
| US20240317254A1 (en) | Smart vehicle | |
| JP6704568B1 (ja) | 情報処理システム、情報処理装置、端末装置、サーバ装置、プログラム、又は方法 | |
| Rodemerk | Potential of Driving Style Adaptation for a Maneuver Prediction System at Urban Intersections |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20160323 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20160719 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20160901 |
|
| A02 | Decision of refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A02 Effective date: 20170307 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20170424 |
|
| A911 | Transfer to examiner for re-examination before appeal (zenchi) |
Free format text: JAPANESE INTERMEDIATE CODE: A911 Effective date: 20170502 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20170801 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20170825 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 6200421 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |