JP6186863B2 - 測距装置及びプログラム - Google Patents
測距装置及びプログラム Download PDFInfo
- Publication number
- JP6186863B2 JP6186863B2 JP2013097863A JP2013097863A JP6186863B2 JP 6186863 B2 JP6186863 B2 JP 6186863B2 JP 2013097863 A JP2013097863 A JP 2013097863A JP 2013097863 A JP2013097863 A JP 2013097863A JP 6186863 B2 JP6186863 B2 JP 6186863B2
- Authority
- JP
- Japan
- Prior art keywords
- angle
- scanning mirror
- light
- distance
- light receiving
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images





Description
前記光源からの光線を反射することにより外部に出射し、前記光線の出射方向が変化するように角度が制御される第1走査ミラーと、
受光素子と、
外部から入射する光線を前記受光素子に向けて反射し、外部の複数方向から入射する光線のうち、前記受光素子に受光される方向の光線が変化するように角度が制御される第2走査ミラーと、
前記受光素子の受光出力に基づいて、外部に存在する測定対象物までの距離を算出する距離測定部と、
前記測定対象物までの距離に関する距離情報と、前記光線の出射時の前記第1走査ミラーの角度に関する角度情報とに基づいて、前記第2走査ミラーの角度を制御する制御装置とを含み、
前記距離情報は、前記距離測定部の算出結果に基づいて生成される、測距装置が提供される。
β1=(θ1−α1)/2 式(1)
ここで、α1は、光源202の設置角度、即ち、基準線L1に対する光源202からの光線の角度である。角度α1は、基準線L1の光源202側を0度として反時計方向を正方向として増加する角度とする。また、出射方向θ1は、基準線L1の光源202とは逆側を0度として時計方向を正方向として増加する角度とする。尚、図2(A)において、ラインC1は、第1走査ミラー204の回転中心O1を通る、第1走査ミラー204の表面(反射面)に対する法線を表す。尚、式(1)は、光源202からの光線とラインC1との間の角度(90−α1−β1)が、第1走査ミラー204で反射する光線70AとラインC1との間の角度(90−θ1+β1)に等しいことに基づく。
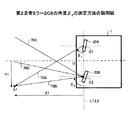
β2=(θ2−α2)/2 式(2)
ここで、α2は、受光素子206の設置角度、即ち、基準線L2に対する受光素子206への光線の角度である。角度α2は、基準線L2の受光素子206側を0度として反時計方向を正方向として増加する角度とする。また、出射方向θ2は、基準線L2の受光素子206とは逆側を0度として時計方向を正方向として増加する角度とする。尚、図2(B)において、ラインC2は、第2走査ミラー208の回転中心O2を通る、第2走査ミラー208の表面(反射面)に対する法線を表す。尚、式(2)は、受光素子206に向かって反射する光線とラインC2との間の角度(90−α2−β2)が、角度(90−θ2+β2)に等しいことに基づく。この角度(90−θ2+β2)は、第2走査ミラー208に入射する光線70B(受光素子206に向かって反射することになる光線)とラインC2との間の角度である。
tan(θ2)=X1/(Y1-L) 式(3)
tan(θ1)=X1/(Y1+L) 式(4)
式(3)及び式(4)から、以下の式(5)が導かれる。
θ2=arctan(X1/(X1cot(θ1)-2L) 式(5)
よって、上述の式(2)から、第2走査ミラー208の角度β2は、以下の式(6)に基づいて決定されてよい。
β2={arctan(X1/(X1cot(θ1)-2L)-α2}/2 式(6)
(付記1)
光源と、
前記光源からの光線を反射することにより外部に出射し、前記光線の出射方向が変化するように角度が制御される第1走査ミラーと、
受光素子と、
外部から入射する光線を前記受光素子に向けて反射し、外部の複数方向から入射する光線のうち、前記受光素子に受光される方向の光線が変化するように角度が制御される第2走査ミラーと、
前記受光素子の受光出力に基づいて、外部に存在する測定対象物までの距離を算出する距離測定部と、
前記測定対象物までの距離に関する距離情報と、前記光線の出射時の前記第1走査ミラーの角度に関する角度情報とに基づいて、前記第2走査ミラーの角度を制御する制御装置とを含む、測距装置。
(付記2)
前記距離情報は、前記距離測定部の算出結果に基づいて生成される、付記1に記載の測距装置。
(付記3)
前記制御装置は、前記受光素子の設置角度をα2とし、前記測定対象物までの距離をX1とし、前記第1走査ミラーの角度をβ1とし、前記第1走査ミラーの回転中心と第2走査ミラーの回転中心間の距離を2Lとしたとき、β2={arctan(X1/(X1cot(θ1)-2L)-α2}/2なる関係式に基づいて、前記第2走査ミラーの角度β2を決定する、付記1又は2に記載の測距装置。
(付記4)
前記制御装置は、前記測定対象物までの距離が所定閾値よりも小さいと判定した場合に、前記測定対象物までの距離に関する情報と、前記第1走査ミラーの角度に関する情報とに基づいて、前記第2走査ミラーの角度を制御し、前記測定対象物までの距離が所定閾値よりも大きいと判定した場合に、前記測定対象物までの距離に関する情報、及び、前記第1走査ミラーの角度に関する情報のうち、前記第1走査ミラーの角度に関する情報のみに基づいて、前記第2走査ミラーの角度を制御する、付記1〜3のうちのいずれか1項に記載の測距装置。
(付記5)
前記光源は、レーザ光源である、付記1〜4のうちのいずれか1項に記載の測距装置。
(付記6)
光源からの光線を反射して外部に出射する第1走査ミラーの角度を設定し、
光源から光線を出射し、
前記光線の出射時の前記第1走査ミラーの角度に関する角度情報と、外部に存在する測定対象物までの距離に関する距離情報とを取得し、
外部から入射する光線を受光素子に向けて反射する第2走査ミラーの角度を、前記取得した角度情報及び距離情報に基づいて算出し、
前記算出した第2走査ミラーの角度となるように、第2走査ミラーの角度を変更し、
前記角度が変更された前記第2走査ミラーにより反射された光線を、受光素子を用いて受光し、
前記受光素子の受光出力に基づいて前記測定対象物までの距離を算出することを含む、測距方法。
(付記7)
光線の出射方向が変化するように角度が制御される第1走査ミラーにおける光線の出射時の角度に関する角度情報を取得し、
外部に存在する測定対象物までの距離に関する距離情報を取得し、
外部から入射する光線を受光素子に向けて反射し、外部の複数方向から入射する光線のうち、前記受光素子に受光される方向の光線が変化するように角度が制御される第2走査ミラーにおける角度を、前記取得した角度情報及び距離情報に基づいて算出し、
前記算出した第2走査ミラーの角度となるように、第2走査ミラーの角度を変更する制御信号を生成する、
処理をコンピューターに実行させるプログラム。
(付記8)
光源からの光線を反射して外部に出射する第1走査ミラーの角度を設定し、
光源から光線を出射し、
前記光線の出射時の前記第1走査ミラーの角度に関する角度情報と、外部に存在する測定対象物までの距離に関する距離情報とを取得し、
外部から入射する光線を受光素子に向けて反射する第2走査ミラーの角度を、前記取得した角度情報及び距離情報に基づいて算出し、
前記算出した第2走査ミラーの角度となるように、第2走査ミラーの角度を変更し、
前記角度が変更された前記第2走査ミラーにより反射された光線を、受光素子を用いて受光し、
前記受光素子の受光出力に基づいて、前記測定対象物までの距離を算出する、
処理をコンピューターに実行させるプログラム。
100 処理装置
102 レーザ駆動回路
104 第1走査ミラーコントローラ
106 受光出力アンプ
108 第2走査ミラーコントローラ
110 飛行時間測定回路
112 測定制御回路
200 光学装置
202 光源
204 第1走査ミラー
206 受光素子
208 第2走査ミラー
210 集光レンズ
212 波長選択フィルタ
Claims (3)
- 光源と、
前記光源からの光線を反射することにより外部に出射し、前記光線の出射方向が変化するように角度が制御される第1走査ミラーと、
受光素子と、
外部から入射する光線を前記受光素子に向けて反射し、外部の複数方向から入射する光線のうち、前記受光素子に受光される方向の光線が変化するように角度が制御される第2走査ミラーと、
前記受光素子の受光出力に基づいて、外部に存在する測定対象物までの距離を算出する距離測定部と、
前記測定対象物までの距離に関する距離情報と、前記光線の出射時の前記第1走査ミラーの角度に関する角度情報とに基づいて、前記第2走査ミラーの角度を制御する制御装置とを含み、
前記距離情報は、前記距離測定部の算出結果に基づいて生成される、測距装置。 - 前記制御装置は、前記受光素子の設置角度をα2とし、前記測定対象物までの距離をX1とし、前記第1走査ミラーの角度をβ1とし、前記第1走査ミラーの回転中心と前記第2走査ミラーの回転中心間の距離を2Lとしたとき、β2={arctan(X1/(X1cot(θ1)-2L)-α2}/2なる関係式に基づいて、前記第2走査ミラーの角度β2を決定する、請求項1に記載の測距装置。
- 光線の出射方向が変化するように角度が制御される第1走査ミラーにおける光線の出射時の角度に関する角度情報を取得し、
受光素子の受光出力に基づいて、外部に存在する測定対象物までの距離を算出し、
前記距離の算出結果に基づいて生成される前記測定対象物までの距離に関する距離情報を取得し、
外部から入射する光線を前記受光素子に向けて反射し、外部の複数方向から入射する光線のうち、前記受光素子に受光される方向の光線が変化するように角度が制御される第2走査ミラーにおける角度を、前記取得した角度情報及び距離情報に基づいて算出し、
前記算出した第2走査ミラーの角度となるように、第2走査ミラーの角度を変更する制御信号を生成する、
処理をコンピューターに実行させるプログラム。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2013097863A JP6186863B2 (ja) | 2013-05-07 | 2013-05-07 | 測距装置及びプログラム |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2013097863A JP6186863B2 (ja) | 2013-05-07 | 2013-05-07 | 測距装置及びプログラム |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2014219250A JP2014219250A (ja) | 2014-11-20 |
| JP6186863B2 true JP6186863B2 (ja) | 2017-08-30 |
Family
ID=51937846
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2013097863A Active JP6186863B2 (ja) | 2013-05-07 | 2013-05-07 | 測距装置及びプログラム |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP6186863B2 (ja) |
Families Citing this family (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US10976413B2 (en) | 2017-02-14 | 2021-04-13 | Baidu Usa Llc | LIDAR system with synchronized MEMS mirrors |
| JP2019039847A (ja) | 2017-08-28 | 2019-03-14 | オムロンオートモーティブエレクトロニクス株式会社 | 対象物検出装置 |
| JP2019138675A (ja) | 2018-02-07 | 2019-08-22 | オムロンオートモーティブエレクトロニクス株式会社 | 対象物検出装置 |
| JP7148249B2 (ja) * | 2018-03-13 | 2022-10-05 | パイオニア株式会社 | 測距装置 |
| JP2020003329A (ja) * | 2018-06-28 | 2020-01-09 | パイオニア株式会社 | 光学装置、測距装置及び測距方法 |
Family Cites Families (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH02210287A (ja) * | 1989-02-10 | 1990-08-21 | Opt:Kk | 測距装置 |
| JPH088469Y2 (ja) * | 1989-12-26 | 1996-03-06 | 株式会社日本アレフ | 物体検出装置 |
| JPH07270535A (ja) * | 1994-03-31 | 1995-10-20 | Omron Corp | 光電センサ,レーザ測距装置およびレーザ測距装置を搭載した車両 |
| JP3169074B2 (ja) * | 1998-09-25 | 2001-05-21 | 日本電気株式会社 | レーザレーダ装置 |
| JP5293686B2 (ja) * | 2010-06-16 | 2013-09-18 | パルステック工業株式会社 | 3次元形状測定装置 |
-
2013
- 2013-05-07 JP JP2013097863A patent/JP6186863B2/ja active Active
Also Published As
| Publication number | Publication date |
|---|---|
| JP2014219250A (ja) | 2014-11-20 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US10371817B2 (en) | Object detecting apparatus | |
| JP6111617B2 (ja) | レーザレーダ装置 | |
| KR101521356B1 (ko) | 거리 측정 장치, 거리 측정 방법 및 컴퓨터 판독 가능한 기억 매체 | |
| US9891432B2 (en) | Object detection device and sensing apparatus | |
| US20160209499A1 (en) | Object detection device, sensing device, movable body device, and object detection method | |
| CN110691983A (zh) | 具有结构光及集成照明和检测的基于lidar的3-d成像 | |
| WO2019163673A1 (ja) | 光測距装置 | |
| JP6186863B2 (ja) | 測距装置及びプログラム | |
| US9981604B2 (en) | Object detector and sensing apparatus | |
| US11408982B2 (en) | Electromagnetic wave detection apparatus, program, and electromagnetic wave detection system | |
| US11686819B2 (en) | Dynamic beam splitter for direct time of flight distance measurements | |
| US11754678B2 (en) | Electromagnetic wave detection apparatus, program, and electromagnetic wave detection system | |
| US20230065210A1 (en) | Optical distance measuring device | |
| JP2018021776A (ja) | 視差演算システム、移動体及びプログラム | |
| US11573301B2 (en) | Electromagnetic wave detection apparatus, program, and electromagnetic wave detection system | |
| US20200292667A1 (en) | Object detector | |
| US11194021B2 (en) | Electromagnetic wave detection apparatus, program, and electromagnetic wave detection system comprising a controller to update related information associating an emission direction and two elements defining two points on a path of electromagnetic waves | |
| JP2017173258A (ja) | 距離測定装置、距離測定方法及びプログラム | |
| WO2020085089A1 (ja) | 電磁波検出装置 | |
| US20230161040A1 (en) | Electromagnetic wave detection apparatus and range finder | |
| JP2023101803A (ja) | 走査装置及び測距装置 | |
| JP2023116245A (ja) | 測定装置 | |
| JP2021181886A (ja) | 光学測距装置 | |
| CN115720619A (zh) | 测定装置 | |
| JP2019002847A (ja) | 電磁波検出装置および情報取得システム |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20160226 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20161213 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20170126 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20170704 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20170717 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 6186863 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |