JP6136494B2 - 情報処理方法、装置及びプログラム - Google Patents
情報処理方法、装置及びプログラム Download PDFInfo
- Publication number
- JP6136494B2 JP6136494B2 JP2013082605A JP2013082605A JP6136494B2 JP 6136494 B2 JP6136494 B2 JP 6136494B2 JP 2013082605 A JP2013082605 A JP 2013082605A JP 2013082605 A JP2013082605 A JP 2013082605A JP 6136494 B2 JP6136494 B2 JP 6136494B2
- Authority
- JP
- Japan
- Prior art keywords
- vector
- function
- value
- state deviation
- control input
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images












Landscapes
- Feedback Control In General (AREA)
- Electrical Control Of Air Or Fuel Supplied To Internal-Combustion Engine (AREA)
- Combined Controls Of Internal Combustion Engines (AREA)
Description
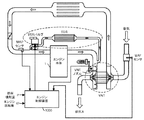
図1にディーゼルエンジンの吸気システムを示す。ディーゼルエンジンの吸気制御系は、吸気圧制御系と新気量制御系を含む。吸気圧制御系は、排気中の微粒子物質(PM:Particulate Matter)を低減するために、可変ノズルターボVNTのノズル径を制御して吸気圧を吸気圧目標値に追従するようにコントロールしている。一方、新気量制御系は、排気中の窒素酸化物(NOx)を低減するために、排気をシリンダ内に再循環させる排気循環器EGRのバルブ開度を制御して新気量を新気量目標値に追従するようにコントロールしている。

b=xmafbmaf+xmapbmap+bconst (27)
d(xbase maf(k))=(1 0)Bu(k−1) (101)と置く。
ディーゼルエンジンは、EGRバルブとVNTノズルを操作することでMAFとMAPを最適に制御することで、最適な燃焼状態を保ち、有害物質(例えばNOx、PM)の発生を抑制する。
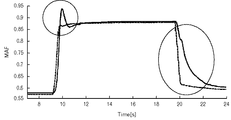
すなわち、上りの状態の時は上限の設定が難しく、下りの時は目標値を上回る状態が続くことが多いため、現在の状態が制約を満たさない場合がある。
(b)運転状態は運転手に依存するため,状態制約を切り替えて制御することが難しい。
(c)外乱やノイズの影響で状態制約を超えてしまう可能性があり、最適解を求めることができなくなることがある。
一般にMAFとMAPの追従性にはトレードオフの関係があるため、MAFの追従性を上げるためにMAPは悪化するという現象が発生する。そこで、以下のような制御を行うと効果的である。
(B)MAFはある程度目標値に近いがMAPが目標値から大きく離れている場合、MAFにペナルティ関数を加えて得られる効果よりMAPの悪化が大きくなることが多いので、ペナルティ関数を加えない。
(C)MAF及びMAPともに目標値から離れている場合には、MAF重視であってもMAPもある程度追従していなければNOx及びPMは減らないし、MAF及びMAPともに大きく変化させようとする場合、入力のバルブが全開もしくは全閉になることが多く、ペナルティ関数を入れたとしても入力制約の影響で効果が出ないことが多い。従って、計算量の観点もあり、ペナルティ関数を加えない。
(a)モデル予測制御の評価関数とラグランジュ乗数を含み且つ前記制御対象の状態方程式に関する第1の関数との和を含む第2の関数を前記ラグランジュ乗数について偏微分することで得られ且つ前記制御対象の状態偏差及び前記制御対象に対する線形化制御入力を変数として含む第1の一次式群と、(b)前記第2の関数を前記制御対象の状態偏差について偏微分することで得られ且つ前記制御対象の状態偏差及び前記ラグランジュ乗数を変数として含む第2の一次式群と、(c)前記第2の関数を前記制御対象の線形化制御入力について偏微分することで得られ且つ前記ラグランジュ乗数及び前記制御対象の状態偏差を変数として含む第3の一次式群とを格納するデータ格納部から前記第1の一次式群を読み出して、前記状態偏差の現在値を除き前記状態偏差の変数を消し込むように順次代入を行って、前記第1の一次式群を、前記状態偏差の現在値と前記線形化制御入力とを変数として含む第4の一次式群に変形し、
前記データ格納部から前記第2の一次式群を読み出して、前記ラグランジュ乗数の変数を消し込むように順次代入を行って、前記第2の一次式群を、前記状態偏差を変数として含む第5の一次式群に変形し、
前記データ格納部から前記第3の一次式群を読み出して、前記第4の一次式群及び前記第5の一次式群を代入することで、前記第3の一次式群を、前記状態偏差の現在値と前記線形化制御入力とを変数として含む第6の一次式群に変形し、
前記第6の一次式群を、第1の係数行列と前記線形化制御入力についてのベクトルとの積が、前記状態偏差の現在値の関数ベクトルと等式で表されるように変形し、
前記モデル予測制御の制御対象についての制約条件に対応するペナルティ関数を前記状態偏差について1階偏微分した第1の微分関数及び2階偏微分した第2の微分関数を生成し、
前記第4の一次式群から前記線形化制御入力についての係数を抽出し、前記ペナルティ関数について予め定められている第2の係数行列及び係数ベクトルを算出する
処理を、コンピュータに実行させるためのプログラム。
前記ペナルティ関数が、前記状態偏差が第1の値以上第2の値以下で0となり、前記状態偏差が前記第1の値より小さい場合及び前記第2の値より大きい場合前記状態偏差の値に応じて指数関数的に増加する関数である
付記1記載のプログラム。
前記ペナルティ関数が、前記状態偏差が第1の値以上第2の値以下で0となり、前記状態偏差が前記第1の値より小さい場合に前記状態偏差の値に応じて指数関数的に増加する第1の関数と、前記第2の値より大きい場合前記状態偏差の値に応じて指数関数的に増加する第2の関数とで表され、
前記第1及び第2の微分関数を、前記第1の関数及び前記第2の関数の各々について生成する
付記1記載のプログラム。
モデル予測制御の制御対象についての状態偏差の現在値についての関数ベクトルと、制御期間内における前記制御対象に対する線形化制御入力のベクトルとの積が前記関数ベクトルと等しくなるように予め算出されている第1の係数行列と、前記モデル予測制御の制御対象における状態制約に対応するペナルティ関数について予め算出されている第2の係数行列及び係数ベクトルと、前記ペナルティ関数を前記状態偏差について1階偏微分した第1の式及び2階偏微分した第2の式とを格納するデータ格納部から前記第1の式及び第2の式を読み出して、前記状態偏差の現在値から得られる基点の値を代入することで、第1の値及び第2の値を算出し、
前記データ格納部から前記第1の係数行列及び前記第2の係数行列を読み出して、前記第2の値と前記第2の係数行列との積と前記第1の係数行列との和である第1の行列を算出し、
前記データ格納部から前記関数ベクトルを読み出して、前記関数ベクトルに前記状態偏差の現在値を代入することで得られる第1のベクトルと、前記第1の値と前記第2の値との差に前記線形化制御入力の1単位時間前の値から得られる第3の値を乗じた結果と前記係数ベクトルとの積との和である第2のベクトルを算出し、
前記第1の行列の逆行列と前記第2のベクトルとの積により、前記線形化制御入力のベクトルを生成し、
前記線形化制御入力のベクトルの要素のうち最初の時刻のための線形化制御入力を抽出する
処理をプロセッサに実行させるためのプログラム。
前記状態偏差の現在値が所定範囲内であるか判断する処理をさらに含み、
前記状態偏差の現在値が前記所定範囲内であれば、前記第1の値及び第2の値を算出する処理と、前記第1の行列を算出する処理と、前記第2のベクトルを算出する処理と、前記線形化制御入力のベクトルを生成する処理と、前記線形化制御入力を抽出する処理とを実行する
付記4記載のプログラム。
前記データ格納部が、
前記状態偏差の現在値の値域に応じた前記第1の式及び第2の式を格納しており、
前記第1の値及び前記第2の値を算出する処理が、
前記状態偏差の現在値が属する値域を特定し、当該特定された値域に応じた前記第1の式及び前記第2の式を読み出す処理
を含む付記4又は5記載のプログラム。
前記状態偏差の現在値が前記所定範囲外であれば、
前記データ格納部から前記関数ベクトル及び前記第1の係数行列を読み出して、前記関数ベクトルに前記状態偏差の現在値を代入することで得られる第1のベクトルと、前記第1の係数行列の逆行列との積により、前記線形化制御入力の第2のベクトルを生成し、
前記線形化制御入力の第2のベクトルの要素のうち最初の時刻のための線形化制御入力を抽出する
処理をさらに含む付記3乃至5のいずれか1つ記載のプログラム。
(a)モデル予測制御の評価関数とラグランジュ乗数を含み且つ前記制御対象の状態方程式に関する第1の関数との和を含む第2の関数を前記ラグランジュ乗数について偏微分することで得られ且つ前記制御対象の状態偏差及び前記制御対象に対する線形化制御入力を変数として含む第1の一次式群と、(b)前記第2の関数を前記制御対象の状態偏差について偏微分することで得られ且つ前記制御対象の状態偏差及び前記ラグランジュ乗数を変数として含む第2の一次式群と、(c)前記第2の関数を前記制御対象の線形化制御入力について偏微分することで得られ且つ前記ラグランジュ乗数及び前記制御対象の状態偏差を変数として含む第3の一次式群とを格納するデータ格納部から前記第1の一次式群を読み出して、前記状態偏差の現在値を除き前記状態偏差の変数を消し込むように順次代入を行って、前記第1の一次式群を、前記状態偏差の現在値と前記線形化制御入力とを変数として含む第4の一次式群に変形し、
前記データ格納部から前記第2の一次式群を読み出して、前記ラグランジュ乗数の変数を消し込むように順次代入を行って、前記第2の一次式群を、前記状態偏差を変数として含む第5の一次式群に変形し、
前記データ格納部から前記第3の一次式群を読み出して、前記第4の一次式群及び前記第5の一次式群を代入することで、前記第3の一次式群を、前記状態偏差の現在値と前記線形化制御入力とを変数として含む第6の一次式群に変形し、
前記第6の一次式群を、第1の係数行列と前記線形化制御入力についてのベクトルとの積が、前記状態偏差の現在値の関数ベクトルと等式で表されるように変形し、
前記モデル予測制御の制御対象についての制約条件に対応するペナルティ関数を前記状態偏差について1階偏微分した第1の微分関数及び2階偏微分した第2の微分関数を生成し、
前記第4の一次式群から前記線形化制御入力についての係数を抽出し、前記ペナルティ関数について予め定められている第2の係数行列及び係数ベクトルを算出する
処理を含み、コンピュータにより実行されるオフライン処理方法。
モデル予測制御の制御対象についての状態偏差の現在値についての関数ベクトルと、制御期間内における前記制御対象に対する線形化制御入力のベクトルとの積が前記関数ベクトルと等しくなるように予め算出されている第1の係数行列と、前記モデル予測制御の制御対象における状態制約に対応するペナルティ関数について予め算出されている第2の係数行列及び係数ベクトルと、前記ペナルティ関数を前記状態偏差について1階偏微分した第1の式及び2階偏微分した第2の式とを格納するデータ格納部から前記第1の式及び第2の式を読み出して、前記状態偏差の現在値から得られる基点の値を代入することで、第1の値及び第2の値を算出し、
前記データ格納部から前記第1の係数行列及び前記第2の係数行列を読み出して、前記第2の値と前記第2の係数行列との積と前記第1の係数行列との和である第1の行列を算出し、
前記データ格納部から前記関数ベクトルを読み出して、前記関数ベクトルに前記状態偏差の現在値を代入することで得られる第1のベクトルと、前記第1の値と前記第2の値との差に前記線形化制御入力の1単位時間前の値から得られる第3の値を乗じた結果と前記係数ベクトルとの積との和である第2のベクトルを算出し、
前記第1の行列の逆行列と前記第2のベクトルとの積により、前記線形化制御入力のベクトルを生成し、
前記線形化制御入力のベクトルの要素のうち最初の時刻のための線形化制御入力を抽出する
処理を含み、プロセッサにより実行される制御方法。
(a)モデル予測制御の評価関数とラグランジュ乗数を含み且つ前記制御対象の状態方程式に関する第1の関数との和を含む第2の関数を前記ラグランジュ乗数について偏微分することで得られ且つ前記制御対象の状態偏差及び前記制御対象に対する線形化制御入力を変数として含む第1の一次式群と、(b)前記第2の関数を前記制御対象の状態偏差について偏微分することで得られ且つ前記制御対象の状態偏差及び前記ラグランジュ乗数を変数として含む第2の一次式群と、(c)前記第2の関数を前記制御対象の線形化制御入力について偏微分することで得られ且つ前記ラグランジュ乗数及び前記制御対象の状態偏差を変数として含む第3の一次式群とを格納するデータ格納部から前記第1の一次式群を読み出して、前記状態偏差の現在値を除き前記状態偏差の変数を消し込むように順次代入を行って、前記第1の一次式群を、前記状態偏差の現在値と前記線形化制御入力とを変数として含む第4の一次式群に変形する手段と、
前記データ格納部から前記第2の一次式群を読み出して、前記ラグランジュ乗数の変数を消し込むように順次代入を行って、前記第2の一次式群を、前記状態偏差を変数として含む第5の一次式群に変形する手段と、
前記データ格納部から前記第3の一次式群を読み出して、前記第4の一次式群及び前記第5の一次式群を代入することで、前記第3の一次式群を、前記状態偏差の現在値と前記線形化制御入力とを変数として含む第6の一次式群に変形する手段と、
前記第6の一次式群を、第1の係数行列と前記線形化制御入力についてのベクトルとの積が、前記状態偏差の現在値の関数ベクトルと等式で表されるように変形する手段と、
前記モデル予測制御の制御対象についての制約条件に対応するペナルティ関数を前記状態偏差について1階偏微分した第1の微分関数及び2階偏微分した第2の微分関数を生成する手段と、
前記第4の一次式群から前記線形化制御入力についての係数を抽出し、前記ペナルティ関数について予め定められている第2の係数行列及び係数ベクトルを算出する手段と、
を有するオフライン処理装置。
モデル予測制御の制御対象についての状態偏差の現在値についての関数ベクトルと、制御期間内における前記制御対象に対する線形化制御入力のベクトルとの積が前記関数ベクトルと等しくなるように予め算出されている第1の係数行列と、前記モデル予測制御の制御対象における状態制約に対応するペナルティ関数について予め算出されている第2の係数行列及び係数ベクトルと、前記ペナルティ関数を前記状態偏差について1階偏微分した第1の式及び2階偏微分した第2の式とを格納するデータ格納部から前記第1の式及び第2の式を読み出して、前記状態偏差の現在値から得られる基点の値を代入することで、第1の値及び第2の値を算出する第1の算出部と、
前記データ格納部から前記第1の係数行列及び前記第2の係数行列を読み出して、前記第2の値と前記第2の係数行列との積と前記第1の係数行列との和である第1の行列を算出し、前記データ格納部から前記関数ベクトルを読み出して、前記関数ベクトルに前記状態偏差の現在値を代入することで得られる第1のベクトルと、前記第1の値と前記第2の値との差に前記線形化制御入力の1単位時間前の値から得られる第3の値を乗じた結果と前記係数ベクトルとの積との和である第2のベクトルを算出する第2の算出部と、
前記第1の行列の逆行列と前記第2のベクトルとの積により、前記線形化制御入力のベクトルを生成する生成部と、
前記線形化制御入力のベクトルの要素のうち最初の時刻のための線形化制御入力を出力する出力部と、
を有する制御装置。
102 入力データ格納部
103 第1変形処理部
104 第1データ格納部
105 第2変形処理部
106 第2データ格納部
107 第3変形処理部
108 第3データ格納部
109 第1行列生成部
110 第4データ格納部
111 第2行列生成部
112 微分処理部
Claims (11)
- (a)モデル予測制御の評価関数とラグランジュ乗数を含み且つ制御対象の状態方程式に関する第1の関数との和を含む第2の関数を前記ラグランジュ乗数について偏微分することで得られ且つ前記制御対象の状態偏差及び前記制御対象に対する線形化制御入力を変数として含む第1の一次式群と、(b)前記第2の関数を前記制御対象の状態偏差について偏微分することで得られ且つ前記制御対象の状態偏差及び前記ラグランジュ乗数を変数として含む第2の一次式群と、(c)前記第2の関数を前記制御対象の線形化制御入力について偏微分することで得られ且つ前記ラグランジュ乗数及び前記制御対象の状態偏差を変数として含む第3の一次式群とを格納するデータ格納部から前記第1の一次式群を読み出して、前記状態偏差の現在値を除き前記状態偏差の変数を消し込むように順次代入を行って、前記第1の一次式群を、前記状態偏差の現在値と前記線形化制御入力とを変数として含む第4の一次式群に変形し、
前記データ格納部から前記第2の一次式群を読み出して、前記ラグランジュ乗数の変数を消し込むように順次代入を行って、前記第2の一次式群を、前記状態偏差を変数として含む、前記ラグランジュ乗数についての第5の一次式群に変形し、
前記データ格納部から前記第3の一次式群を読み出して、前記第4の一次式群及び前記第5の一次式群を用いて、前記第3の一次式群を、前記状態偏差の現在値と前記線形化制御入力とを変数として含む第6の一次式群に変形し、
前記第6の一次式群を、第1の係数行列と前記線形化制御入力についてのベクトルとの積が、前記状態偏差の現在値の関数ベクトルと等式で表されるように変形し、
前記モデル予測制御の制御対象における状態制約に対応するペナルティ関数を前記状態偏差について1階偏微分した第1の微分関数及び2階偏微分した第2の微分関数を生成し、
前記第4の一次式群から前記線形化制御入力についての係数を抽出し、前記ペナルティ関数について予め定められている第2の係数行列及び係数ベクトルを算出する
処理を、コンピュータに実行させるためのプログラム。 - 前記ペナルティ関数が、前記状態偏差が第1の値以上第2の値以下で0となり、前記状態偏差が前記第1の値より小さい場合及び前記第2の値より大きい場合前記状態偏差の値に応じて指数関数的に増加する関数である
請求項1記載のプログラム。 - 前記ペナルティ関数が、前記状態偏差が第1の値以上第2の値以下で0となり、前記状態偏差が前記第1の値より小さい場合に前記状態偏差の値に応じて指数関数的に増加する第1の関数と、前記第2の値より大きい場合前記状態偏差の値に応じて指数関数的に増加する第2の関数とで表され、
前記第1及び第2の微分関数を、前記第1の関数及び前記第2の関数の各々について生成する
請求項1記載のプログラム。 - モデル予測制御の制御対象についての状態偏差の現在値についての関数ベクトルと、制御期間内における前記制御対象に対する線形化制御入力のベクトルとの積が前記関数ベクトルと等しくなるように予め算出されている第1の係数行列と、前記モデル予測制御の制御対象における状態制約に対応するペナルティ関数について予め算出されている第2の係数行列及び係数ベクトルと、前記ペナルティ関数を前記状態偏差について1階偏微分した第1の式及び2階偏微分した第2の式とを格納するデータ格納部から前記第1の式及び第2の式を読み出して、前記状態偏差の現在値から得られる基点の値を代入することで、第1の値及び第2の値を算出し、
前記データ格納部から前記第1の係数行列及び前記第2の係数行列を読み出して、前記第2の値と前記第2の係数行列との積と前記第1の係数行列との和である第1の行列を算出し、
前記データ格納部から前記関数ベクトルを読み出して、前記関数ベクトルに前記状態偏差の現在値を代入することで得られる第1のベクトルと、前記第1の値と前記第2の値との差に前記線形化制御入力の1単位時間前の値から得られる第3の値を乗じた結果と前記係数ベクトルとの積との差である第2のベクトルを算出し、
前記第1の行列の逆行列と前記第2のベクトルとの積により、前記線形化制御入力のベクトルを生成し、
前記線形化制御入力のベクトルの要素のうち最初の時刻のための線形化制御入力を抽出する
処理をプロセッサに実行させるためのプログラム。 - 前記状態偏差の現在値が所定範囲内であるか判断する処理をさらに含み、
前記状態偏差の現在値が前記所定範囲内であれば、前記第1の値及び第2の値を算出する処理と、前記第1の行列を算出する処理と、前記第2のベクトルを算出する処理と、前記線形化制御入力のベクトルを生成する処理と、前記線形化制御入力を抽出する処理とを実行する
請求項4記載のプログラム。 - 前記データ格納部が、
前記状態偏差の現在値の値域に応じた前記第1の式及び第2の式を格納しており、
前記第1の値及び前記第2の値を算出する処理が、
前記状態偏差の現在値が属する値域を特定し、当該特定された値域に応じた前記第1の式及び前記第2の式を読み出す処理
を含む請求項4又は5記載のプログラム。 - 前記状態偏差の現在値が前記所定範囲外であれば、
前記データ格納部から前記関数ベクトル及び前記第1の係数行列を読み出して、前記関数ベクトルに前記状態偏差の現在値を代入することで得られる第1のベクトルと、前記第1の係数行列の逆行列との積により、前記線形化制御入力の第2のベクトルを生成し、
前記線形化制御入力の第2のベクトルの要素のうち最初の時刻のための線形化制御入力を抽出する
処理をさらに含む請求項4乃至6のいずれか1つ記載のプログラム。 - (a)モデル予測制御の評価関数とラグランジュ乗数を含み且つ制御対象の状態方程式に関する第1の関数との和を含む第2の関数を前記ラグランジュ乗数について偏微分することで得られ且つ前記制御対象の状態偏差及び前記制御対象に対する線形化制御入力を変数として含む第1の一次式群と、(b)前記第2の関数を前記制御対象の状態偏差について偏微分することで得られ且つ前記制御対象の状態偏差及び前記ラグランジュ乗数を変数として含む第2の一次式群と、(c)前記第2の関数を前記制御対象の線形化制御入力について偏微分することで得られ且つ前記ラグランジュ乗数及び前記制御対象の状態偏差を変数として含む第3の一次式群とを格納するデータ格納部から前記第1の一次式群を読み出して、前記状態偏差の現在値を除き前記状態偏差の変数を消し込むように順次代入を行って、前記第1の一次式群を、前記状態偏差の現在値と前記線形化制御入力とを変数として含む第4の一次式群に変形し、
前記データ格納部から前記第2の一次式群を読み出して、前記ラグランジュ乗数の変数を消し込むように順次代入を行って、前記第2の一次式群を、前記状態偏差を変数として含む、前記ラグランジュ乗数についての第5の一次式群に変形し、
前記データ格納部から前記第3の一次式群を読み出して、前記第4の一次式群及び前記第5の一次式群を用いて、前記第3の一次式群を、前記状態偏差の現在値と前記線形化制御入力とを変数として含む第6の一次式群に変形し、
前記第6の一次式群を、第1の係数行列と前記線形化制御入力についてのベクトルとの積が、前記状態偏差の現在値の関数ベクトルと等式で表されるように変形し、
前記モデル予測制御の制御対象における状態制約に対応するペナルティ関数を前記状態偏差について1階偏微分した第1の微分関数及び2階偏微分した第2の微分関数を生成し、
前記第4の一次式群から前記線形化制御入力についての係数を抽出し、前記ペナルティ関数について予め定められている第2の係数行列及び係数ベクトルを算出する
処理を含み、コンピュータにより実行されるオフライン処理方法。 - モデル予測制御の制御対象についての状態偏差の現在値についての関数ベクトルと、制御期間内における前記制御対象に対する線形化制御入力のベクトルとの積が前記関数ベクトルと等しくなるように予め算出されている第1の係数行列と、前記モデル予測制御の制御対象における状態制約に対応するペナルティ関数について予め算出されている第2の係数行列及び係数ベクトルと、前記ペナルティ関数を前記状態偏差について1階偏微分した第1の式及び2階偏微分した第2の式とを格納するデータ格納部から前記第1の式及び第2の式を読み出して、前記状態偏差の現在値から得られる基点の値を代入することで、第1の値及び第2の値を算出し、
前記データ格納部から前記第1の係数行列及び前記第2の係数行列を読み出して、前記第2の値と前記第2の係数行列との積と前記第1の係数行列との和である第1の行列を算出し、
前記データ格納部から前記関数ベクトルを読み出して、前記関数ベクトルに前記状態偏差の現在値を代入することで得られる第1のベクトルと、前記第1の値と前記第2の値との差に前記線形化制御入力の1単位時間前の値から得られる第3の値を乗じた結果と前記係数ベクトルとの積との差である第2のベクトルを算出し、
前記第1の行列の逆行列と前記第2のベクトルとの積により、前記線形化制御入力のベクトルを生成し、
前記線形化制御入力のベクトルの要素のうち最初の時刻のための線形化制御入力を抽出する
処理を含み、プロセッサにより実行される制御方法。 - (a)モデル予測制御の評価関数とラグランジュ乗数を含み且つ制御対象の状態方程式に関する第1の関数との和を含む第2の関数を前記ラグランジュ乗数について偏微分することで得られ且つ前記制御対象の状態偏差及び前記制御対象に対する線形化制御入力を変数として含む第1の一次式群と、(b)前記第2の関数を前記制御対象の状態偏差について偏微分することで得られ且つ前記制御対象の状態偏差及び前記ラグランジュ乗数を変数として含む第2の一次式群と、(c)前記第2の関数を前記制御対象の線形化制御入力について偏微分することで得られ且つ前記ラグランジュ乗数及び前記制御対象の状態偏差を変数として含む第3の一次式群とを格納するデータ格納部から前記第1の一次式群を読み出して、前記状態偏差の現在値を除き前記状態偏差の変数を消し込むように順次代入を行って、前記第1の一次式群を、前記状態偏差の現在値と前記線形化制御入力とを変数として含む第4の一次式群に変形する手段と、
前記データ格納部から前記第2の一次式群を読み出して、前記ラグランジュ乗数の変数を消し込むように順次代入を行って、前記第2の一次式群を、前記状態偏差を変数として含む、前記ラグランジュ乗数についての第5の一次式群に変形する手段と、
前記データ格納部から前記第3の一次式群を読み出して、前記第4の一次式群及び前記第5の一次式群を用いて、前記第3の一次式群を、前記状態偏差の現在値と前記線形化制御入力とを変数として含む第6の一次式群に変形する手段と、
前記第6の一次式群を、第1の係数行列と前記線形化制御入力についてのベクトルとの積が、前記状態偏差の現在値の関数ベクトルと等式で表されるように変形する手段と、
前記モデル予測制御の制御対象における状態制約に対応するペナルティ関数を前記状態偏差について1階偏微分した第1の微分関数及び2階偏微分した第2の微分関数を生成する手段と、
前記第4の一次式群から前記線形化制御入力についての係数を抽出し、前記ペナルティ関数について予め定められている第2の係数行列及び係数ベクトルを算出する手段と、
を有するオフライン処理装置。 - モデル予測制御の制御対象についての状態偏差の現在値についての関数ベクトルと、制御期間内における前記制御対象に対する線形化制御入力のベクトルとの積が前記関数ベクトルと等しくなるように予め算出されている第1の係数行列と、前記モデル予測制御の制御対象における状態制約に対応するペナルティ関数について予め算出されている第2の係数行列及び係数ベクトルと、前記ペナルティ関数を前記状態偏差について1階偏微分した第1の式及び2階偏微分した第2の式とを格納するデータ格納部から前記第1の式及び第2の式を読み出して、前記状態偏差の現在値から得られる基点の値を代入することで、第1の値及び第2の値を算出する第1の算出部と、
前記データ格納部から前記第1の係数行列及び前記第2の係数行列を読み出して、前記第2の値と前記第2の係数行列との積と前記第1の係数行列との和である第1の行列を算出し、前記データ格納部から前記関数ベクトルを読み出して、前記関数ベクトルに前記状態偏差の現在値を代入することで得られる第1のベクトルと、前記第1の値と前記第2の値との差に前記線形化制御入力の1単位時間前の値から得られる第3の値を乗じた結果と前記係数ベクトルとの積との差である第2のベクトルを算出する第2の算出部と、
前記第1の行列の逆行列と前記第2のベクトルとの積により、前記線形化制御入力のベクトルを生成する生成部と、
前記線形化制御入力のベクトルの要素のうち最初の時刻のための線形化制御入力を出力する出力部と、
を有する制御装置。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2013082605A JP6136494B2 (ja) | 2013-04-11 | 2013-04-11 | 情報処理方法、装置及びプログラム |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2013082605A JP6136494B2 (ja) | 2013-04-11 | 2013-04-11 | 情報処理方法、装置及びプログラム |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2014206802A JP2014206802A (ja) | 2014-10-30 |
| JP6136494B2 true JP6136494B2 (ja) | 2017-05-31 |
Family
ID=52120322
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2013082605A Active JP6136494B2 (ja) | 2013-04-11 | 2013-04-11 | 情報処理方法、装置及びプログラム |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP6136494B2 (ja) |
Families Citing this family (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP6260214B2 (ja) * | 2013-11-12 | 2018-01-17 | 富士通株式会社 | 情報処理方法、装置及びプログラム |
| ES2637006B1 (es) * | 2016-04-07 | 2018-06-21 | Lander BERISTAIN URIZARBARRENA | Dispositivo para la gestión de combustible en motores diesel de gestión electrónica |
Family Cites Families (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH0929057A (ja) * | 1995-07-19 | 1997-02-04 | Toshiba Corp | モデル予測制御装置およびその装置を用いたガス精製プラント |
| JP2001067103A (ja) * | 1999-08-30 | 2001-03-16 | Hitachi Ltd | プロセス制御方法および装置 |
| JP2006072700A (ja) * | 2004-09-02 | 2006-03-16 | Fujitsu Ten Ltd | モデル予測制御装置及びモデル予測制御方法 |
| JP5834759B2 (ja) * | 2011-02-28 | 2015-12-24 | 富士通株式会社 | 行列生成プログラム、方法及び装置、並びにプラント制御プログラム、方法及び装置 |
-
2013
- 2013-04-11 JP JP2013082605A patent/JP6136494B2/ja active Active
Also Published As
| Publication number | Publication date |
|---|---|
| JP2014206802A (ja) | 2014-10-30 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6416781B2 (ja) | 内燃機関空気経路制御のためのレートベースモデル予測制御方法 | |
| JP5834759B2 (ja) | 行列生成プログラム、方法及び装置、並びにプラント制御プログラム、方法及び装置 | |
| JP6386698B2 (ja) | 多変数制御装置 | |
| US9765621B2 (en) | Switch gain scheduled explicit model predictive control of diesel engines | |
| García-Nieto et al. | Nonlinear predictive control based on local model networks for air management in diesel engines | |
| JP6553580B2 (ja) | 内燃機関の空気経路制御のための離散時間レートベースモデル予測制御方法 | |
| US9989001B2 (en) | Discrete time rate-based model predictive control method for internal combustion engine air path control | |
| DeCastro | Rate-based model predictive control of turbofan engine clearance | |
| Harder et al. | A real-time nonlinear MPC scheme with emission constraints for heavy-duty diesel engines | |
| Sankar et al. | Model predictive controller with average emissions constraints for diesel airpath | |
| El Hadef et al. | Explicit nonlinear model predictive control of the air path of a turbocharged spark-ignited engine | |
| Liao-McPherson et al. | A cascaded economic model predictive control strategy for a diesel engine using a non-uniform prediction horizon discretization | |
| JP6136494B2 (ja) | 情報処理方法、装置及びプログラム | |
| Ferreau et al. | Fast nonlinear model predictive control of gasoline engines | |
| Larsen et al. | Coordinated passivation designs | |
| Ortner et al. | Nonlinear model predictive control of a diesel engine airpath | |
| Izci et al. | Feedforward-Compensated PI Controller Design for Air–Fuel Ratio System Control Using Enhanced Weighted Mean of Vectors Algorithm | |
| JP6260214B2 (ja) | 情報処理方法、装置及びプログラム | |
| Asprion et al. | Efficient solution of the diesel-engine optimal control problem by time-domain decomposition | |
| Šantin et al. | Combined gradient and Newton projection quadratic programming solver for MPC | |
| Larguech et al. | Adaptive sliding mode control for a class of nonlinear mimo systems: Application to a turbocharged diesel engine | |
| Zhou et al. | A softly switched multiple model predictive control of a turbocharged diesel engine | |
| Rayasam et al. | Robust Switching MIMO Control of Turbocharged Lean-Burn Natural Gas Engines | |
| JP5903925B2 (ja) | 情報処理方法、装置及びプログラム | |
| Umeda et al. | A fast model predictive control algorithm for diesel engines |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20160113 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20161116 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20161122 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20161226 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20170404 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20170417 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 6136494 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |