JP6082441B2 - 機械的に支援される係合を有する電気コネクタ - Google Patents
機械的に支援される係合を有する電気コネクタ Download PDFInfo
- Publication number
- JP6082441B2 JP6082441B2 JP2015160043A JP2015160043A JP6082441B2 JP 6082441 B2 JP6082441 B2 JP 6082441B2 JP 2015160043 A JP2015160043 A JP 2015160043A JP 2015160043 A JP2015160043 A JP 2015160043A JP 6082441 B2 JP6082441 B2 JP 6082441B2
- Authority
- JP
- Japan
- Prior art keywords
- electrical connector
- lever
- inclined portion
- sliding body
- connector
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
- 230000013011 mating Effects 0.000 claims description 28
- 238000010586 diagram Methods 0.000 description 5
- 230000008859 change Effects 0.000 description 4
- 230000008901 benefit Effects 0.000 description 2
- 238000003780 insertion Methods 0.000 description 2
- 230000037431 insertion Effects 0.000 description 2
- 239000000463 material Substances 0.000 description 2
- 101710139800 Divalent metal cation transporter MntH Proteins 0.000 description 1
- 230000002411 adverse Effects 0.000 description 1
- 230000000694 effects Effects 0.000 description 1
- 230000005611 electricity Effects 0.000 description 1
- 238000012886 linear function Methods 0.000 description 1
- 239000000314 lubricant Substances 0.000 description 1
- 238000005461 lubrication Methods 0.000 description 1
- 230000009467 reduction Effects 0.000 description 1
- 230000007704 transition Effects 0.000 description 1
Images









Classifications
-
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01R—ELECTRICALLY-CONDUCTIVE CONNECTIONS; STRUCTURAL ASSOCIATIONS OF A PLURALITY OF MUTUALLY-INSULATED ELECTRICAL CONNECTING ELEMENTS; COUPLING DEVICES; CURRENT COLLECTORS
- H01R13/00—Details of coupling devices of the kinds covered by groups H01R12/70 or H01R24/00 - H01R33/00
- H01R13/62—Means for facilitating engagement or disengagement of coupling parts or for holding them in engagement
- H01R13/629—Additional means for facilitating engagement or disengagement of coupling parts, e.g. aligning or guiding means, levers, gas pressure electrical locking indicators, manufacturing tolerances
- H01R13/62933—Comprising exclusively pivoting lever
-
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01R—ELECTRICALLY-CONDUCTIVE CONNECTIONS; STRUCTURAL ASSOCIATIONS OF A PLURALITY OF MUTUALLY-INSULATED ELECTRICAL CONNECTING ELEMENTS; COUPLING DEVICES; CURRENT COLLECTORS
- H01R13/00—Details of coupling devices of the kinds covered by groups H01R12/70 or H01R24/00 - H01R33/00
- H01R13/62—Means for facilitating engagement or disengagement of coupling parts or for holding them in engagement
- H01R13/629—Additional means for facilitating engagement or disengagement of coupling parts, e.g. aligning or guiding means, levers, gas pressure electrical locking indicators, manufacturing tolerances
- H01R13/62977—Pivoting levers actuating linearly camming means
-
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01R—ELECTRICALLY-CONDUCTIVE CONNECTIONS; STRUCTURAL ASSOCIATIONS OF A PLURALITY OF MUTUALLY-INSULATED ELECTRICAL CONNECTING ELEMENTS; COUPLING DEVICES; CURRENT COLLECTORS
- H01R13/00—Details of coupling devices of the kinds covered by groups H01R12/70 or H01R24/00 - H01R33/00
- H01R13/62—Means for facilitating engagement or disengagement of coupling parts or for holding them in engagement
- H01R13/629—Additional means for facilitating engagement or disengagement of coupling parts, e.g. aligning or guiding means, levers, gas pressure electrical locking indicators, manufacturing tolerances
- H01R13/62905—Additional means for facilitating engagement or disengagement of coupling parts, e.g. aligning or guiding means, levers, gas pressure electrical locking indicators, manufacturing tolerances comprising a camming member
- H01R13/62922—Pair of camming plates
-
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01R—ELECTRICALLY-CONDUCTIVE CONNECTIONS; STRUCTURAL ASSOCIATIONS OF A PLURALITY OF MUTUALLY-INSULATED ELECTRICAL CONNECTING ELEMENTS; COUPLING DEVICES; CURRENT COLLECTORS
- H01R13/00—Details of coupling devices of the kinds covered by groups H01R12/70 or H01R24/00 - H01R33/00
- H01R13/62—Means for facilitating engagement or disengagement of coupling parts or for holding them in engagement
- H01R13/629—Additional means for facilitating engagement or disengagement of coupling parts, e.g. aligning or guiding means, levers, gas pressure electrical locking indicators, manufacturing tolerances
- H01R13/62933—Comprising exclusively pivoting lever
- H01R13/62938—Pivoting lever comprising own camming means
Landscapes
- Details Of Connecting Devices For Male And Female Coupling (AREA)
- Connector Housings Or Holding Contact Members (AREA)
Description
Fengage=FTMSLT+Fother

法線力Nr=Frcosθ
傾斜部36を滑り落ちるFrの成分Frx’=Frsinθ
柱状部30と傾斜部36との間の摩擦fr=Nrμrである。
傾斜部36と柱状部30との間の摩擦係数μrは、選択される材料に依存する。μrが既知でなければ、0.27の控えめな値が使用されてもよい。
fp=FSPμp
に起因して、力fpを生成する。摺動体23の動きは、摺動体23の底部と筺体との間の摩擦力fsによって対抗されることになる。摩擦係数μs(筺体と摺動体23との間の摩擦係数)およびμp(柱状部30と摺動体23との間の摩擦係数)は、選択される材料の関数である。μsおよびμpが既知でなければ、0.27の控えめな値が使用されてもよい。fsは以下の通りである。
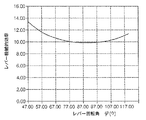
φiからφ=90°までは、レバー16は、摺動体23に上向きの力を印加する
φ=90°からφfまでは、レバー16は、摺動体23に下向きの力を印加する
および傾斜角42(θ)の両方の関数である。
RSP−旋回柱状部と摺動柱状部30との間の距離
R2−操作者接触点と旋回柱状部との間の距離
nr−摺動体1つ当たりの傾斜部の数
ur−傾斜部36と摺動柱状部30との間の摩擦係数
us−摺動体23と筺体の空洞24との間の摩擦係数
up−摺動体23を押すレバー柱状部と摺動体23の切欠き26との間の摩擦係数
lramp−傾斜部の長さ
hramp−傾斜部の高さ
θ−比較可能な線形傾斜角
φi−レバー初期位置20の角度
φf−レバー最終位置22の角度
ΣFt(y)−機械的に支援される電気コネクタ12がy軸に沿って係合する場合の、種類別の端子の数、種類別の係合力、および、y軸に沿った端子の位置に基づく端子の総係合力。
ΣFo(y)−y軸に沿ったこれらの要素の位置に基づくシールおよび/またはグロメットの総係合力。
傾斜部36の構成は、下記のこれらのステップに従うことによって最適化されてもよい。
1.係合力をyの関数として記述するための式を展開する。
(a)Fengage=f(y)=ΣFt(y)LtMs+ΣFo(y)
2.以下のように最適化すべき1つ以上の定数を有する傾斜部36の幾何学的形状を記述するための式を展開する。
(b)y=f(x)であり、その結果、傾斜部36の勾配は、
3.以下のように、xとレバーの角度φとの間の関係を記述するための式を展開する。
(d)x=f(φ)
4.摺動体23A,23Bを押す柱状部に作用する力を分析すると、
(e)FSP=f(θ)
が得られる。θと
(f)FSP=f(x)
が得られる。
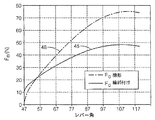
5.レバー16に作用する力を分析すると、
(g)F0=f(φ)
が得られる。
6.(f)を(g)に代入して、Foを簡略化する。
7.例えば、ステップa)からh)での次の例で示されるようにnを調整することによって、最小のF0MAXを
φiからφfまで最適化するために反復手法を使用する。
a)Fengage=my+b、ただしb=0、
b)
c)
h)
12…電気コネクタ
14…相手側コネクタ
16…レバー
20…第1の位置
22…第2の位置
23…摺動体
28…スロット
30…柱状部
36…傾斜部
36…部分
38…スロット開口部
38…スロット開口
42…傾斜角
Claims (4)
- 電気コネクタ(12)であって、
前記電気コネクタ(12)に移動可能に結合されるレバー(16)であって、第1の位置(20)から第2の位置(22)まで移動可能であるレバー(16)と、
前記電気コネクタ(12)に摺動可能に結合される摺動体(23)であって、前記レバー(16)が前記第1の位置(20)から前記第2の位置(22)まで回転運動することによって前記摺動体(23)を横方向に移動させるように前記レバー(16)に結合される摺動体(23)と
を備え、
前記摺動体(23)は、スロット開口部(38)とスロット端部(40)との間に一定ではない半径を有する傾斜部(36)を有するスロット(28)を形成し、
前記傾斜部(36)は、前記レバー(16)が前記第1の位置(20)から前記第2の位置(22)まで移動されるときに、前記電気コネクタ(12)および相手側コネクタ(14)を共に押圧するのに有効な態様で、前記相手側コネクタ(14)の柱状部(30)と係合するように構成され、
前記傾斜部(36)は、前記傾斜部(36)の勾配が前記傾斜部(36)の長さに沿って一定ではないように湾曲しており、
前記傾斜部(36)の前記勾配は、前記電気コネクタ(12)を前記相手側コネクタ(14)に接続するときに、前記レバー(16)を前記第1の位置(20)から前記第2の位置(22)まで進めるために加えられる力(44)のピーク値を低減するように構成された
電気コネクタ。 - 請求項1に記載の電気コネクタ(12)であって、
前記傾斜部(36)の前記勾配は、数式dy/dx=nx n−1にしたがって変えられ、
前記xは、前記摺動体(23)の長手方向として規定され、
前記yは、前記長手方向に直行する方向として規定される
電気コネクタ。 - 請求項1に記載の電気コネクタ(12)であって、
前記傾斜部(36)の前記勾配は、前記電気コネクタ(12)および前記相手側コネクタ(14)が共に押圧されるときに、前記電気コネクタ(12)および前記相手側コネクタ(14)によって生じる係合力(34)に従って変えられる
電気コネクタ。 - 請求項3に記載の電気コネクタ(12)であって、
前記傾斜部(36)の前記勾配は、前記摺動体(23)を移動させるための前記レバー(16)の機械的効率に従ってさらに変えられる
電気コネクタ(12)。
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| US14/470,016 US9368910B2 (en) | 2014-08-27 | 2014-08-27 | Electrical connector with mechanically assisted engagement |
| US14/470,016 | 2014-08-27 |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2016048678A JP2016048678A (ja) | 2016-04-07 |
| JP2016048678A5 JP2016048678A5 (ja) | 2016-09-29 |
| JP6082441B2 true JP6082441B2 (ja) | 2017-02-15 |
Family
ID=53773352
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2015160043A Active JP6082441B2 (ja) | 2014-08-27 | 2015-08-14 | 機械的に支援される係合を有する電気コネクタ |
Country Status (6)
| Country | Link |
|---|---|
| US (1) | US9368910B2 (ja) |
| EP (1) | EP2991168A1 (ja) |
| JP (1) | JP6082441B2 (ja) |
| KR (1) | KR20160025469A (ja) |
| CN (1) | CN105375194B (ja) |
| BR (1) | BR102015017594A2 (ja) |
Families Citing this family (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| DE202014010345U1 (de) * | 2014-05-06 | 2015-07-14 | Phoenix Contact Gmbh & Co. Kg | Anschlussleiste für ein Elektronikgerät |
| JP6222588B1 (ja) * | 2016-10-14 | 2017-11-01 | 住友電装株式会社 | レバー式コネクタ |
| CN118693568A (zh) * | 2024-08-27 | 2024-09-24 | 海的电子科技(苏州)有限公司 | 电力连接器组件和显示屏的老化测试系统 |
Family Cites Families (22)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH08227757A (ja) * | 1991-06-26 | 1996-09-03 | Yazaki Corp | 操作レバーを利用した低挿入力コネクタ |
| GB9500374D0 (en) * | 1995-01-10 | 1995-03-01 | Amp Gmbh | Electrical connector having a mating slide with customized camming slot |
| JP3701683B2 (ja) * | 1995-04-12 | 2005-10-05 | ザ ウィタカー コーポレーション | モジュール型電気接続ユニット |
| JP3317622B2 (ja) * | 1996-02-07 | 2002-08-26 | 矢崎総業株式会社 | 低挿入力コネクタ |
| US5715135A (en) | 1996-08-12 | 1998-02-03 | General Motors Corporation | Electrical distribution center with two-piece insulation assembly |
| US5788529A (en) | 1997-06-09 | 1998-08-04 | General Motors Corporation | Top down electrical distribution center assembly |
| JP3345566B2 (ja) | 1997-07-01 | 2002-11-18 | 矢崎総業株式会社 | レバー嵌合式コネクタ |
| JP3321039B2 (ja) | 1997-08-18 | 2002-09-03 | 矢崎総業株式会社 | レバー嵌合式コネクタ |
| JP3438633B2 (ja) * | 1999-02-19 | 2003-08-18 | 矢崎総業株式会社 | 低嵌合力コネクタ |
| EP1100160B1 (en) * | 1999-11-10 | 2007-03-21 | Molex Incorporated | Electrical connector assembly with improved camming system |
| US6305957B1 (en) | 2000-02-24 | 2001-10-23 | Delphi Technologies, Inc. | Electrical connector assembly |
| DE20013281U1 (de) * | 2000-08-02 | 2001-12-13 | Robert Bosch Gmbh, 70469 Stuttgart | Kabelbaumstecker mit einem Verriegelungsschieber und einer Vorverrastung |
| JP2003331983A (ja) * | 2002-05-14 | 2003-11-21 | Sumitomo Wiring Syst Ltd | レバー式コネクタ |
| US6739889B1 (en) | 2003-05-30 | 2004-05-25 | Delphi Technologies, Inc. | Electrical distribution center assembly |
| US6824406B1 (en) * | 2003-06-26 | 2004-11-30 | Delphi Technologies, Inc. | Electrical connector assembly |
| US6971894B2 (en) * | 2004-03-31 | 2005-12-06 | Jst Corporation | Dual action mechanical assisted connector |
| US7094081B1 (en) | 2005-03-24 | 2006-08-22 | Delphi Technologies, Inc. | Electrical connector assembly |
| JP4678333B2 (ja) | 2005-09-29 | 2011-04-27 | 住友電装株式会社 | レバー式コネクタ |
| JP4382134B2 (ja) * | 2008-03-28 | 2009-12-09 | タイコエレクトロニクスアンプ株式会社 | レバー式コネクタ |
| US9118145B2 (en) | 2012-06-18 | 2015-08-25 | Tyco Electronics Corporation | Latch assemblies for connector systems |
| WO2014046877A1 (en) | 2012-09-18 | 2014-03-27 | Delphi Technologies, Inc. | Electrical distribution center |
| JP5846105B2 (ja) * | 2012-11-13 | 2016-01-20 | 住友電装株式会社 | レバー式コネクタ |
-
2014
- 2014-08-27 US US14/470,016 patent/US9368910B2/en active Active
-
2015
- 2015-06-30 CN CN201510373055.1A patent/CN105375194B/zh active Active
- 2015-07-23 BR BR102015017594A patent/BR102015017594A2/pt not_active Application Discontinuation
- 2015-08-03 EP EP15179541.6A patent/EP2991168A1/en not_active Withdrawn
- 2015-08-14 JP JP2015160043A patent/JP6082441B2/ja active Active
- 2015-08-24 KR KR1020150118585A patent/KR20160025469A/ko not_active Application Discontinuation
Also Published As
| Publication number | Publication date |
|---|---|
| CN105375194A (zh) | 2016-03-02 |
| KR20160025469A (ko) | 2016-03-08 |
| US9368910B2 (en) | 2016-06-14 |
| CN105375194B (zh) | 2017-06-23 |
| BR102015017594A2 (pt) | 2016-03-01 |
| JP2016048678A (ja) | 2016-04-07 |
| US20160064856A1 (en) | 2016-03-03 |
| EP2991168A1 (en) | 2016-03-02 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6082441B2 (ja) | 機械的に支援される係合を有する電気コネクタ | |
| JP6361174B2 (ja) | プローブピン、および、これを用いた電子デバイス | |
| JP3202701U (ja) | 軌道型電気接続端子の導電配線構成 | |
| KR102249177B1 (ko) | 클램핑력이 향상된 전기 단자 | |
| CN106134012B (zh) | 一种电连接器组件 | |
| CN105281062B (zh) | 电连接装置和多极电插头连接器 | |
| US9337571B2 (en) | Sealing member and sealing structure | |
| JP6969643B2 (ja) | 端子モジュール、端子モジュールユニット、及びコネクタ | |
| CN106486791A (zh) | 用于在凸片触头和高电流导体之间建立电连接的装置 | |
| KR101208447B1 (ko) | 접속단자 | |
| US20180123276A1 (en) | Flat Contact Socket With A Cantilever | |
| US10090608B2 (en) | Electrical connection system having a terminal with contact ridges | |
| US9437971B2 (en) | Connector with a locking and unlocking mechanism | |
| CN104145382B (zh) | 杆式连接器 | |
| JP2017010755A (ja) | 雄型コネクタ及び雌型コネクタ並びにこれらのコネクタからなる電気コネクタ | |
| JP2017507457A (ja) | ループ状ばね部分を備えるコンタクト要素 | |
| US20150059131A1 (en) | Fixing Structure for Rope | |
| KR101309543B1 (ko) | 전기 커넥터 | |
| CN114498132A (zh) | 连接端子 | |
| US20080124973A1 (en) | Low friction cable assembly latch | |
| CN106104935A (zh) | 插入式的连接件 | |
| US10530095B2 (en) | Re-wireable electrical connector | |
| JP5321920B2 (ja) | コネクタ | |
| GB2580376A (en) | Electrical Connector | |
| US11502451B1 (en) | Quick release device for releasing an electrical modular connector from an electrical jack |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20160810 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20160810 |
|
| A871 | Explanation of circumstances concerning accelerated examination |
Free format text: JAPANESE INTERMEDIATE CODE: A871 Effective date: 20160810 |
|
| A975 | Report on accelerated examination |
Free format text: JAPANESE INTERMEDIATE CODE: A971005 Effective date: 20161013 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20161017 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20161124 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20161222 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20170120 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 6082441 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| S111 | Request for change of ownership or part of ownership |
Free format text: JAPANESE INTERMEDIATE CODE: R313113 |
|
| S533 | Written request for registration of change of name |
Free format text: JAPANESE INTERMEDIATE CODE: R313533 |
|
| R350 | Written notification of registration of transfer |
Free format text: JAPANESE INTERMEDIATE CODE: R350 |
|
| RD02 | Notification of acceptance of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: R3D02 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |