JP6041133B2 - 画像処理装置、画像処理方法、画像処理プログラムおよびチップ回路 - Google Patents
画像処理装置、画像処理方法、画像処理プログラムおよびチップ回路 Download PDFInfo
- Publication number
- JP6041133B2 JP6041133B2 JP2012255986A JP2012255986A JP6041133B2 JP 6041133 B2 JP6041133 B2 JP 6041133B2 JP 2012255986 A JP2012255986 A JP 2012255986A JP 2012255986 A JP2012255986 A JP 2012255986A JP 6041133 B2 JP6041133 B2 JP 6041133B2
- Authority
- JP
- Japan
- Prior art keywords
- pixel
- image
- image processing
- processing apparatus
- random number
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images









Classifications
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T5/00—Image enhancement or restoration
- G06T5/70—Denoising; Smoothing
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T5/00—Image enhancement or restoration
- G06T5/50—Image enhancement or restoration using two or more images, e.g. averaging or subtraction
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T2207/00—Indexing scheme for image analysis or image enhancement
- G06T2207/10—Image acquisition modality
- G06T2207/10024—Color image
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T2207/00—Indexing scheme for image analysis or image enhancement
- G06T2207/20—Special algorithmic details
- G06T2207/20004—Adaptive image processing
- G06T2207/20012—Locally adaptive
Landscapes
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Engineering & Computer Science (AREA)
- Theoretical Computer Science (AREA)
- Image Processing (AREA)
- Facsimile Image Signal Circuits (AREA)
Description
以下、図1〜図4を用いて、実施の形態1を説明する。
図1は、実施の形態1に係る画像処理装置の構成を示すブロック図である。画像処理装置10は、第1の算出部11と、第2の算出部12と、積和演算部13と、係数総和部14と、除算部15と、出力部16とを備える。

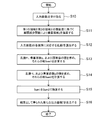
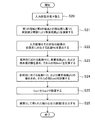
以上のように構成された画像処理装置10について、その動作を説明する。
以上のように、本実施の形態では、着目画素20を含む第1の領域24と、参照画素21を含む第2の領域25との類似度に基づく単調減少関数を用いて、着目画素20と参照画素21との乗算係数gが算出される。参照画素21は、入力画像Iに含まれる画素のうち、乱数f1が割り当てられた画素である。つまり、複数の参照画素21は、入力画像Iにおいてランダムに存在する。
実施の形態1では、入力画像Iをモノクロ画像として説明したが、画像処理装置10は、カラーフィルタアレイ(以下、CFAと表記する。)を介して得られるCFA画像に対して、直接ノイズ平準化処理を行ってもよい。以下、入力画像IをCFA画像とした場合について説明する。
次に、画像処理装置10にカラー画像を入力する場合について説明する。カラー画像は、例えば、R,G,B、あるいはY,Cb,Crといった複数のチャネルを含んでいる。本変形例では、Y,Cb,Crのチャネルを含むカラー画像への適用例を説明する。
変形例2では、カラー画像を構成する各チャネルに応じて、乱数の期待値や参照画素の設定範囲を変更する場合について説明したが、1つの画像内における着目画素と参照画素との類似度に基づいて、乱数の期待値や参照画素の設定範囲を変更してもよい。
上述した画像処理装置10は、カラー画像やモノクロ画像など、単一の画像に対してノイズ平準化処理を行うものとして説明したが、時間的に連続して撮像された複数の画像に対してノイズ平準化処理を行ってもよい。つまり、画像処理装置10は、動画像に対しても適用することができる。
変形例4では、複数の画像を用いて1つの画像に含まれるノイズを除去する場合について説明したが、複数の画像のそれぞれに対してノイズ平準化処理を行ってもよい。
上述した実施の形態1および各変形例では、2値乱数を用いる場合について説明したが、3値以上の多値乱数を用いてもよい。
以上のように、本出願において開示する技術の例示として、実施の形態1および変形例1〜6を説明した。しかしながら、本開示における技術は、これに限定されず、適宜、変更、置き換え、付加、省略などを行った実施の形態にも適用可能である。また、上記実施の形態1および変形例1〜6で説明した各構成要素を組み合わせて、新たな実施の形態とすることも可能である。
11 第1の算出部
12 第2の算出部
13 積和演算部
14 係数総和部
15 除算部
20 着目画素
21 参照画素
24 第1の領域
25 第2の領域
f 乱数
g 乗算係数
I 入力画像
I’ 出力画像
Claims (14)
- 入力画像に対してノイズ平準化処理を行う画像処理装置であって、
前記入力画像の着目画素に関して、ランダムに定められた各参照画素について、当該着目画素を含む第1の領域と当該参照画素を含む第2の領域との類似度を算出し、この類似度が高くなるにつれて値が大きくなる乗算係数を、前記各参照画素についてそれぞれ算出する第1の算出部と、
前記各参照画素に割り当てられた乱数を算出する第2の算出部と、
前記各参照画素について、当該参照画素の画素値に、当該参照画素についての前記乗算係数と、当該参照画素に割り当てられた乱数とを乗算して、第1乗算結果をそれぞれ求め、前記各参照画素についてそれぞれ求めた前記第1乗算結果の総和を演算する積和演算部と、
前記各参照画素について、当該参照画素についての前記乗算係数に、当該参照画素に割り当てられた乱数を乗算して、第2乗算結果をそれぞれ求め、前記各参照画素についてそれぞれ求めた前記第2乗算結果の総和を演算する係数総和部と、
前記積和演算部の演算結果を前記係数総和部の演算結果で除算し、当該除算結果を、前記着目画素の画素値として出力する除算部とを備えている
ことを特徴とする画像処理装置。 - 請求項1の画像処理装置において、
前記入力画像は、カラーフィルタを介して当該画像処理装置に入力されるものであり、
前記着目画素と前記各参照画素とは同色の画素である
ことを特徴とする画像処理装置。 - 請求項2の画像処理装置において、
前記各参照画素は、前記着目画素から偶数列あるいは偶数行離れた位置に存在する
ことを特徴とする画像処理装置。 - 請求項1の画像処理装置において、
前記入力画像は、輝度画像および色差画像を含むカラー画像であり、
前記第2の算出部は、前記輝度画像と前記色差画像とで、前記乱数の期待値を変更することを特徴とする画像処理装置。 - 請求項1の画像処理装置において、
前記入力画像は、輝度画像および色差画像を含むカラー画像であり、
前記色差画像において前記各参照画素が定められた画素の範囲は、前記輝度画像よりも広い
ことを特徴とする画像処理装置。 - 請求項1の画像処理装置において、
前記第1の算出部は、前記着目画素と前記各参照画素との類似度を判定するものであり、
前記第2の算出部は、前記第1の算出部による類似度の判定結果に応じて前記乱数の期待値を変更する
ことを特徴とする画像処理装置。 - 請求項1の画像処理装置において、
前記第1の算出部は、前記着目画素と前記各参照画素との類似度を判定するものであり、
前記類似度が低い参照画素が多くなるにつれて、前記入力画像において前記各参照画素が定められた画素の範囲が広くなる
ことを特徴とする画像処理装置。 - 請求項1の画像処理装置において、
前記入力画像は、当該画像処理装置に複数入力されるものであり、
前記着目画素は、前記複数入力される入力画像のいずれかに設定され、
前記各参照画素は、前記着目画素が設定される入力画像および当該入力画像の前および後の少なくとも一方の入力画像に設定される
ことを特徴とする画像処理装置。 - 請求項8の画像処理装置において、
前記着目画素および前記各参照画素は、前記複数入力される入力画像のそれぞれに設定されるものであり、
前記各参照画素は、前記着目画素が前記複数入力される入力画像のそれぞれにおける同一の画素である場合、前記複数入力される入力画像において、それぞれ異なる画素である
ことを特徴とする画像処理装置。 - 請求項1の画像処理装置において、
前記乱数は、1あるいは0の値をとる2値乱数である
ことを特徴とする画像処理装置。 - 請求項1の画像処理装置において、
前記乱数は、多値乱数である
ことを特徴とする画像処理装置。 - 入力画像に対してノイズ平準化処理を行う画像処理方法であって、
前記入力画像の着目画素に関して、ランダムに定められた各参照画素について、当該着目画素を含む第1の領域と当該参照画素を含む第2の領域との類似度を算出する類似度算出ステップと、
前記類似度が高くなるにつれて値が大きくなる乗算係数を、前記各参照画素についてそれぞれ算出する第1の算出ステップと、
前記各参照画素に割り当てられた乱数を算出する第2の算出ステップと、
前記各参照画素について、当該参照画素の画素値に、当該参照画素についての前記乗算係数と、当該参照画素に割り当てられた乱数とを乗算して、第1乗算結果をそれぞれ求め、前記各参照画素についてそれぞれ求めた前記第1乗算結果の総和を演算する積和演算ステップと、
前記各参照画素について、当該参照画素についての前記乗算係数に、当該参照画素に割り当てられた乱数を乗算して、第2乗算結果をそれぞれ求め、前記各参照画素についてそれぞれ求めた前記第2乗算結果の総和を演算する係数総和ステップと、
前記積和演算ステップの演算結果を前記係数総和ステップの演算結果で除算し、当該除算結果を、前記着目画素の画素値として算出する除算ステップとを備えている
ことを特徴とする画像処理方法。 - コンピュータに、入力画像に対してノイズ平準化処理を行わせるための画像処理プログラムであって、
前記入力画像の着目画素に関して、ランダムに定められた各参照画素について、当該着目画素を含む第1の領域と当該参照画素を含む第2の領域との類似度を算出する類似度算出機能、
前記類似度が高くなるにつれて値が大きくなる乗算係数を、前記各参照画素についてそれぞれ算出する第1の算出機能、
前記各参照画素に割り当てられた乱数を算出する第2の算出機能、
前記各参照画素について、当該参照画素の画素値に、当該参照画素についての前記乗算係数と、当該参照画素に割り当てられた乱数とを乗算して、第1乗算結果をそれぞれ求め、前記各参照画素についてそれぞれ求めた前記第1乗算結果の総和を演算する積和演算機能、
前記各参照画素について、当該参照画素についての前記乗算係数に、当該参照画素に割り当てられた乱数を乗算して、第2乗算結果をそれぞれ求め、前記各参照画素についてそれぞれ求めた前記第2乗算結果の総和を演算する係数総和機能、および
前記積和演算機能による演算結果を前記係数総和機能による演算結果で除算し、当該除算結果を、前記着目画素の画素値として算出する除算機能、をコンピュータに実行させる
ことを特徴とする画像処理プログラム。 - 請求項13の画像処理プログラムが組み込まれている
ことを特徴とするチップ回路。
Priority Applications (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2012255986A JP6041133B2 (ja) | 2012-06-08 | 2012-11-22 | 画像処理装置、画像処理方法、画像処理プログラムおよびチップ回路 |
| US13/759,596 US8908965B2 (en) | 2012-06-08 | 2013-02-05 | Image processor, image processing method, image processing program, and chip circuit |
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2012130577 | 2012-06-08 | ||
| JP2012130577 | 2012-06-08 | ||
| JP2012255986A JP6041133B2 (ja) | 2012-06-08 | 2012-11-22 | 画像処理装置、画像処理方法、画像処理プログラムおよびチップ回路 |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2014014064A JP2014014064A (ja) | 2014-01-23 |
| JP2014014064A5 JP2014014064A5 (ja) | 2015-04-23 |
| JP6041133B2 true JP6041133B2 (ja) | 2016-12-07 |
Family
ID=49715368
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2012255986A Active JP6041133B2 (ja) | 2012-06-08 | 2012-11-22 | 画像処理装置、画像処理方法、画像処理プログラムおよびチップ回路 |
Country Status (2)
| Country | Link |
|---|---|
| US (1) | US8908965B2 (ja) |
| JP (1) | JP6041133B2 (ja) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP3455582B2 (ja) | 1994-05-17 | 2003-10-14 | 株式会社イシダ | 計量装置 |
Families Citing this family (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2013047727A (ja) * | 2011-08-29 | 2013-03-07 | Sony Corp | 情報処理装置、情報処理方法、プログラム、及び記録媒体 |
| JP6253331B2 (ja) * | 2012-10-25 | 2017-12-27 | キヤノン株式会社 | 画像処理装置及び画像処理方法 |
| JP6071419B2 (ja) * | 2012-10-25 | 2017-02-01 | キヤノン株式会社 | 画像処理装置及び画像処理方法 |
| JP6332951B2 (ja) * | 2013-11-29 | 2018-05-30 | キヤノン株式会社 | 画像処理装置および画像処理方法、およびプログラム |
| US10380447B1 (en) * | 2014-11-26 | 2019-08-13 | Google Llc | Providing regions of interest in an image |
Family Cites Families (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| EP0496573B1 (en) * | 1991-01-24 | 1995-12-20 | Matsushita Electric Industrial Co., Ltd. | Pixel defect removing circuit for solid-state image pickup device |
| FR2737034A1 (fr) | 1995-07-21 | 1997-01-24 | Philips Electronique Lab | Procede de traitement spatial d'une image numerique pour la reduction du bruit, et dispositif mettant en oeuvre ce procede |
| US6151420A (en) * | 1995-12-15 | 2000-11-21 | Polaroid Corporation | Minimizing blocking artifacts in a filtered image |
| US6108455A (en) * | 1998-05-29 | 2000-08-22 | Stmicroelectronics, Inc. | Non-linear image filter for filtering noise |
| JP3862613B2 (ja) * | 2002-06-05 | 2006-12-27 | キヤノン株式会社 | 画像処理装置及び画像処理方法並びにコンピュータプログラム |
| JP3862621B2 (ja) * | 2002-06-28 | 2006-12-27 | キヤノン株式会社 | 画像処理装置、画像処理方法、及びそのプログラム |
| JP5012315B2 (ja) * | 2007-08-20 | 2012-08-29 | セイコーエプソン株式会社 | 画像処理装置 |
-
2012
- 2012-11-22 JP JP2012255986A patent/JP6041133B2/ja active Active
-
2013
- 2013-02-05 US US13/759,596 patent/US8908965B2/en active Active
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP3455582B2 (ja) | 1994-05-17 | 2003-10-14 | 株式会社イシダ | 計量装置 |
Also Published As
| Publication number | Publication date |
|---|---|
| JP2014014064A (ja) | 2014-01-23 |
| US8908965B2 (en) | 2014-12-09 |
| US20130329999A1 (en) | 2013-12-12 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6012375B2 (ja) | 画素補間処理装置、撮像装置、プログラムおよび集積回路 | |
| JP6041133B2 (ja) | 画像処理装置、画像処理方法、画像処理プログラムおよびチップ回路 | |
| TWI573464B (zh) | An image processing apparatus, an image processing method, an image processing program, and a recording medium | |
| JP5983373B2 (ja) | 画像処理装置、情報処理方法及びプログラム | |
| US8238685B2 (en) | Image noise reduction method and image processing apparatus using the same | |
| JP4861667B2 (ja) | 画像処理装置及び画像処理方法 | |
| KR101257946B1 (ko) | 영상의 색수차를 제거하는 장치 및 그 방법 | |
| JP5917048B2 (ja) | 画像処理装置、画像処理方法およびプログラム | |
| JP2013055623A (ja) | 画像処理装置、および画像処理方法、情報記録媒体、並びにプログラム | |
| JP2008160740A (ja) | 画像処理装置 | |
| JP2005167974A (ja) | 画像処理方法及び画像処理装置、画像処理プログラム並びに半導体装置 | |
| JP2015062270A (ja) | 画像処理装置 | |
| KR101699318B1 (ko) | 화상처리장치 및 그 제어방법 | |
| US10848726B2 (en) | Color-shift calibration method and device | |
| JP5103580B2 (ja) | 画像処理装置およびデジタルカメラ | |
| JP2009194721A (ja) | 画像信号処理装置、画像信号処理方法、及び撮像装置 | |
| JP2009200635A (ja) | 画像処理装置及びその方法並びにプログラム | |
| JP5981824B2 (ja) | 画素補間処理装置、撮像装置、プログラムおよび集積回路 | |
| JP5484015B2 (ja) | 撮像装置、撮像方法、及びプログラム | |
| JP2007028040A (ja) | 画像処理装置 | |
| JP7299398B1 (ja) | 画像処理装置および画像処理方法 | |
| JP4889391B2 (ja) | 画像処理装置および画像処理方法 | |
| JP2007028041A (ja) | 画像処理装置 | |
| JP6569751B2 (ja) | 画像処理装置、カメラおよび画像処理プログラム | |
| JP6299104B2 (ja) | 画像処理装置、カメラおよび画像処理プログラム |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A711 | Notification of change in applicant |
Free format text: JAPANESE INTERMEDIATE CODE: A711 Effective date: 20141006 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20150304 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20150304 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20160229 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20160405 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20160520 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20161018 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20161026 |
|
| R151 | Written notification of patent or utility model registration |
Ref document number: 6041133 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R151 |