JP6018961B2 - めっき装置およびめっき方法 - Google Patents
めっき装置およびめっき方法 Download PDFInfo
- Publication number
- JP6018961B2 JP6018961B2 JP2013063800A JP2013063800A JP6018961B2 JP 6018961 B2 JP6018961 B2 JP 6018961B2 JP 2013063800 A JP2013063800 A JP 2013063800A JP 2013063800 A JP2013063800 A JP 2013063800A JP 6018961 B2 JP6018961 B2 JP 6018961B2
- Authority
- JP
- Japan
- Prior art keywords
- substrate
- substrate holder
- suction
- suction nozzle
- suction mechanism
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
- 238000007747 plating Methods 0.000 title claims description 78
- 238000000034 method Methods 0.000 title claims description 24
- 239000000758 substrate Substances 0.000 claims description 363
- 238000012545 processing Methods 0.000 claims description 136
- 230000007246 mechanism Effects 0.000 claims description 133
- 239000007788 liquid Substances 0.000 claims description 109
- 238000007789 sealing Methods 0.000 claims description 26
- 238000011084 recovery Methods 0.000 description 19
- 230000002093 peripheral effect Effects 0.000 description 13
- 238000010586 diagram Methods 0.000 description 12
- XLYOFNOQVPJJNP-UHFFFAOYSA-N water Substances O XLYOFNOQVPJJNP-UHFFFAOYSA-N 0.000 description 10
- 238000003825 pressing Methods 0.000 description 8
- 238000005406 washing Methods 0.000 description 8
- 230000008569 process Effects 0.000 description 7
- 238000011282 treatment Methods 0.000 description 7
- 238000009713 electroplating Methods 0.000 description 6
- 238000012546 transfer Methods 0.000 description 6
- 238000013459 approach Methods 0.000 description 4
- 239000004020 conductor Substances 0.000 description 4
- 230000032258 transport Effects 0.000 description 4
- 238000011109 contamination Methods 0.000 description 3
- PXHVJJICTQNCMI-UHFFFAOYSA-N Nickel Chemical compound [Ni] PXHVJJICTQNCMI-UHFFFAOYSA-N 0.000 description 2
- BZHJMEDXRYGGRV-UHFFFAOYSA-N Vinyl chloride Chemical compound ClC=C BZHJMEDXRYGGRV-UHFFFAOYSA-N 0.000 description 2
- 230000002411 adverse Effects 0.000 description 2
- 238000007664 blowing Methods 0.000 description 2
- 238000007772 electroless plating Methods 0.000 description 2
- 230000005484 gravity Effects 0.000 description 2
- 239000000463 material Substances 0.000 description 2
- 230000004048 modification Effects 0.000 description 2
- 238000012986 modification Methods 0.000 description 2
- 230000000630 rising effect Effects 0.000 description 2
- 239000004065 semiconductor Substances 0.000 description 2
- 125000006850 spacer group Chemical group 0.000 description 2
- RYGMFSIKBFXOCR-UHFFFAOYSA-N Copper Chemical compound [Cu] RYGMFSIKBFXOCR-UHFFFAOYSA-N 0.000 description 1
- RTAQQCXQSZGOHL-UHFFFAOYSA-N Titanium Chemical compound [Ti] RTAQQCXQSZGOHL-UHFFFAOYSA-N 0.000 description 1
- 239000002253 acid Substances 0.000 description 1
- 150000007513 acids Chemical class 0.000 description 1
- 230000009471 action Effects 0.000 description 1
- 230000001174 ascending effect Effects 0.000 description 1
- 238000004140 cleaning Methods 0.000 description 1
- 229910052802 copper Inorganic materials 0.000 description 1
- 239000010949 copper Substances 0.000 description 1
- 238000005260 corrosion Methods 0.000 description 1
- 230000007797 corrosion Effects 0.000 description 1
- 230000007423 decrease Effects 0.000 description 1
- 230000003028 elevating effect Effects 0.000 description 1
- PCHJSUWPFVWCPO-UHFFFAOYSA-N gold Chemical compound [Au] PCHJSUWPFVWCPO-UHFFFAOYSA-N 0.000 description 1
- 229910052737 gold Inorganic materials 0.000 description 1
- 239000010931 gold Substances 0.000 description 1
- 229910052759 nickel Inorganic materials 0.000 description 1
- 239000004810 polytetrafluoroethylene Substances 0.000 description 1
- 229920001343 polytetrafluoroethylene Polymers 0.000 description 1
- 238000007781 pre-processing Methods 0.000 description 1
- 238000002203 pretreatment Methods 0.000 description 1
- 238000007639 printing Methods 0.000 description 1
- 229910000679 solder Inorganic materials 0.000 description 1
- 239000007921 spray Substances 0.000 description 1
- 238000003756 stirring Methods 0.000 description 1
- 239000010936 titanium Substances 0.000 description 1
- 229910052719 titanium Inorganic materials 0.000 description 1
- 238000011144 upstream manufacturing Methods 0.000 description 1
- 238000007740 vapor deposition Methods 0.000 description 1
Images


















Landscapes
- Electroplating Methods And Accessories (AREA)
Description
本発明の好ましい態様は、前記吸引機構は、前記シール部材および前記基板上に残留する処理液を吸引する第1の吸引機構と、前記基板の表面上に残留する処理液を吸引する第2の吸引機構から構成され、前記X軸アクチュエータは、前記第1の吸引機構を前記基板ホルダに保持された前記基板に近接および離間する方向に移動させる第1のX軸アクチュエータと、前記第2の吸引機構を前記基板ホルダに保持された前記基板に近接および離間する方向に移動させる第2のX軸アクチュエータから構成されることを特徴とする。
本発明の好ましい態様は、前記Y軸アクチュエータおよび前記Z軸アクチュエータは、予め設定された経路に沿って前記第1の吸引機構を移動させることができる電動アクチュエータから構成されることを特徴とする。
本発明の好ましい態様は、前記第1の吸引機構は、前記シール部材の形状に沿って配列された複数の吸引ノズルを備えることを特徴とする。
本発明の好ましい態様は、前記第1の吸引機構は、前記シール部材の形状に沿ったスリットを有する吸引ノズルを備えることを特徴とする。
本発明の好ましい態様は、前記基板ホルダを水平方向に搬送している間、前記シール部材および前記基板上に残留する前記処理液を前記吸引機構により吸引することを特徴とする。
3 制御部
4 アライナ
6 スピン・リンス・ドライヤ(SRD)
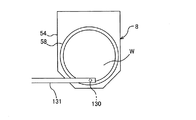
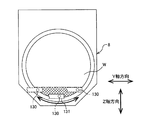
8 基板ホルダ
20 テーブル
24 基板ホルダ開閉機構
26 基板ホルダ起倒機構
30 ストッカ
32 前水洗槽
34 めっき槽
36 リンス槽
38 ブロー槽
54 第1保持部材
56 ヒンジ
58 第2保持部材
62 シールホルダ
64 押えリング
66 基板側シール部材
68 ホルダ側シール部材
92 ハンドレバー
100 トランスポータ
101 リフタ
102 固定ベース
103 グリッパ
104 アーム
105 フック
106 押圧機構
107 押圧部材
109 エアシリンダ
109a ピストンロッド
110 処理槽
112 第1の吸引機構
116 第2の吸引機構
120 処理液回収機構
124 移動機構
130 第1の吸引ノズル
131 第1の吸引管
136 第2の吸引ノズル
137 第2の吸引管
140 第1のX軸アクチュエータ
141 連結部材
142 第2のX軸アクチュエータ
143 連結部材
144 Y軸アクチュエータ
146 Z軸アクチュエータ
150 真空ライン
154 回収タンク
160 排液管
161 処理液回収管
Claims (11)
- 処理液を溜める処理槽と、
シール部材を基板に押し付けた状態で前記基板を保持する基板ホルダと、
前記基板を保持した前記基板ホルダを前記処理槽内の前記処理液に浸漬させ、前記基板ホルダを前記処理槽から引き上げ、さらに前記基板ホルダを搬送するトランスポータと、
前記基板ホルダに保持された前記基板上に残留する前記処理液を吸引する吸引機構と、
前記吸引機構を前記基板ホルダに対して相対的に移動させる移動機構とを備え、
前記吸引機構は前記移動機構に取り付けられ、前記移動機構は前記トランスポータに取り付けられており、
前記トランスポータは、前記基板ホルダを水平方向に搬送している間、前記吸引機構および前記移動機構を前記基板ホルダと一体に水平方向に移動させることを特徴とするめっき装置。 - 前記移動機構は、前記吸引機構を前記基板ホルダに保持された前記基板に近接および離間する方向に移動させるX軸アクチュエータを備えることを特徴とする請求項1に記載のめっき装置。
- 前記吸引機構は、
前記シール部材および前記基板上に残留する処理液を吸引する第1の吸引機構と、
前記基板の表面上に残留する処理液を吸引する第2の吸引機構から構成され、
前記X軸アクチュエータは、
前記第1の吸引機構を前記基板ホルダに保持された前記基板に近接および離間する方向に移動させる第1のX軸アクチュエータと、
前記第2の吸引機構を前記基板ホルダに保持された前記基板に近接および離間する方向に移動させる第2のX軸アクチュエータから構成されることを特徴とする請求項2に記載のめっき装置。 - 前記移動機構は、
前記吸引機構を前記基板ホルダに保持された前記基板と平行に、かつ水平方向に移動させるY軸アクチュエータと、
前記吸引機構を鉛直方向に移動させるZ軸アクチュエータとをさらに備えることを特徴とする請求項3に記載のめっき装置。 - 前記Y軸アクチュエータおよび前記Z軸アクチュエータは、予め設定された経路に沿って前記第1の吸引機構を移動させることができる電動アクチュエータから構成されることを特徴とする請求項4に記載のめっき装置。
- 前記第1の吸引機構は、単一の吸引ノズルを備えることを特徴とする請求項3に記載のめっき装置。
- 前記第1の吸引機構は、前記シール部材の形状に沿って配列された複数の吸引ノズルを備えることを特徴とする請求項3に記載のめっき装置。
- 前記第1の吸引機構は、前記シール部材の形状に沿ったスリットを有する吸引ノズルを備えることを特徴とする請求項3に記載のめっき装置。
- シール部材を基板に押し付けた状態で基板ホルダにより基板を保持し、
前記基板を保持した前記基板ホルダを処理槽内の処理液に浸漬させ、
前記基板ホルダを前記処理槽から引き上げ、
前記基板ホルダを前記基板とともに水平方向に搬送し、
前記基板ホルダを水平方向に搬送している間、前記基板上に残留する前記処理液を吸引機構により吸引することを特徴とするめっき方法。 - 前記基板ホルダを前記処理槽から引き上げている間、前記基板上に残留する前記処理液を前記吸引機構により吸引することを特徴とする請求項9に記載のめっき方法。
- 前記基板ホルダを水平方向に搬送している間、前記シール部材および前記基板上に残留する前記処理液を前記吸引機構により吸引することを特徴とする請求項9に記載のめっき方法。
Priority Applications (6)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2013063800A JP6018961B2 (ja) | 2013-03-26 | 2013-03-26 | めっき装置およびめっき方法 |
| US14/223,972 US9388504B2 (en) | 2013-03-26 | 2014-03-24 | Plating apparatus and plating method |
| TW103110989A TWI613322B (zh) | 2013-03-26 | 2014-03-25 | 鍍覆裝置及鍍覆方法 |
| TW106145064A TWI657165B (zh) | 2013-03-26 | 2014-03-25 | 鍍覆裝置 |
| US15/179,835 US10294576B2 (en) | 2013-03-26 | 2016-06-10 | Plating apparatus |
| US16/380,843 US10577706B2 (en) | 2013-03-26 | 2019-04-10 | Plating apparatus |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2013063800A JP6018961B2 (ja) | 2013-03-26 | 2013-03-26 | めっき装置およびめっき方法 |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2014189806A JP2014189806A (ja) | 2014-10-06 |
| JP2014189806A5 JP2014189806A5 (ja) | 2015-12-03 |
| JP6018961B2 true JP6018961B2 (ja) | 2016-11-02 |
Family
ID=51836384
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2013063800A Active JP6018961B2 (ja) | 2013-03-26 | 2013-03-26 | めっき装置およびめっき方法 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP6018961B2 (ja) |
Families Citing this family (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP6746185B2 (ja) * | 2016-02-01 | 2020-08-26 | アスカコーポレーション株式会社 | 半導体ウェハめっき用治具 |
| JP6951269B2 (ja) * | 2018-01-29 | 2021-10-20 | 株式会社荏原製作所 | 基板処理装置、基板処理装置の制御装置、基板処理装置の制御方法、プログラムを格納した記憶媒体 |
| JP7059172B2 (ja) * | 2018-12-21 | 2022-04-25 | 株式会社荏原製作所 | 基板ホルダのシールから液体を除去するための方法 |
| PT3758049T (pt) * | 2019-06-26 | 2022-03-21 | Atotech Deutschland Gmbh & Co Kg | Dispositivo e método para mover um objeto para uma estação de processamento, sistema de transporte e aparelho de processamento |
Family Cites Families (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2911882B1 (ja) * | 1998-06-23 | 1999-06-23 | 日本エレクトロプレイテイング・エンジニヤース株式会社 | カップ式めっき装置 |
| US6660139B1 (en) * | 1999-11-08 | 2003-12-09 | Ebara Corporation | Plating apparatus and method |
| JP3284496B2 (ja) * | 2000-08-09 | 2002-05-20 | 株式会社荏原製作所 | めっき装置及びめっき液除去方法 |
| JP2003247098A (ja) * | 2002-02-21 | 2003-09-05 | Ebara Corp | めっき装置 |
| JP2005068450A (ja) * | 2003-08-26 | 2005-03-17 | Noge Denki Kogyo:Kk | 長尺材の連続めっき加工における減圧式洗浄方法及び装置 |
| JP2008255374A (ja) * | 2007-03-30 | 2008-10-23 | Kayaba Ind Co Ltd | 表面処理装置および表面処理方法 |
| JP5785480B2 (ja) * | 2011-11-16 | 2015-09-30 | 株式会社荏原製作所 | 無電解めっき装置及び無電解めっき方法 |
-
2013
- 2013-03-26 JP JP2013063800A patent/JP6018961B2/ja active Active
Also Published As
| Publication number | Publication date |
|---|---|
| JP2014189806A (ja) | 2014-10-06 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| TWI613322B (zh) | 鍍覆裝置及鍍覆方法 | |
| JP6383450B2 (ja) | めっき装置 | |
| US10077504B2 (en) | Plating apparatus | |
| US9506162B2 (en) | Electrochemical deposition method | |
| JP7067863B2 (ja) | 基板を処理するための方法および装置 | |
| JP4124327B2 (ja) | 基板ホルダ及びめっき装置 | |
| US20150090584A1 (en) | Plating apparatus and cleaning device used in the plating apparatus | |
| JP6018961B2 (ja) | めっき装置およびめっき方法 | |
| US20160319456A1 (en) | Electrochemical deposition method | |
| KR102565317B1 (ko) | 기판 세정 방법 | |
| JP2004052059A (ja) | 基板ホルダ及びめっき装置 | |
| JP6204832B2 (ja) | めっき装置およびめっき方法 | |
| JP2004043936A (ja) | 基板ホルダ及びめっき装置 | |
| JP2015233038A (ja) | 基板ホルダ用の基板着脱部及びこれを備えた湿式基板処理装置 | |
| JP2002363797A (ja) | 電気接点及びその製造方法、並びにめっき装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20151019 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20151019 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20160829 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20160906 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20161003 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 6018961 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |