〔発明が解決しようとする課題〕
しかし、上述の操舵力検出装置や操舵力計においては、操縦者はステアリング装置に取り付けられた測定用の装置を介して操舵操作しなければならないため、実際の運転時に手とステアリングホイールとの間に作用する力を正確に測定することができない。また、上述の操舵力検出装置や操舵力計によっては、ステアリングホイールの周方向以外の方向の作用力を測定することはできないという問題がある。
特に、操舵力検出装置においては、操縦者はリム部ではなくリム部よりも大きいグリップを把持しなければならならず、また、操舵角が大きくなってもグリップを把持した状態を維持しなければならないため、大舵角の操舵操作時の作用力を測定することができないという問題がある。また、操舵力計においては、ステアリングホイールの軸部の上端に操舵力計を剛固に取り付ける必要があり、ステアリングホイールを傷つけてしまうため、操舵力を測定した後に、ステアリングホイールを交換しなければならないという問題がある。
本発明は、操作者が手により把持して操作するステアリングホイールと操作者の手との間に作用する力を測定する従来の装置における上述の如き問題に鑑みてなされたものである。そして、本発明の主要な課題は、操作者が実際にステアリングホイールを手により把持して操作する状況にできるだけ近い測定状況を確保し、ステアリングホイールと操作者の手との間に作用する力を複数の方向について正確に測定することである。
〔課題を解決するための手段および発明の効果〕
上述の主要な課題は、本発明によれば、操作者が手により把持して操作するステアリングホイールと操作者の手との間に作用する力を測定する作用力測定装置であって、操作者の複数の指に装着される複数の装着部材と、操作者が手によりステアリングホイールを把持するとステアリングホイールと指の第一関節との間に位置するよう対応する装着部材に固定された複数の力センサとを有する力検出装置と、前記力センサにより検出された力に基づいて作用力を演算する演算制御装置とを備え、前記力センサは、操作者の指がステアリングホイールに押圧力を与える方向および該方向に垂直な他の一つの方向の少なくとも二つの方向について力を検出し、前記演算制御装置は、前記少なくとも二つの方向の力に基づいて作用力を演算することを特徴とする作用力測定装置(請求項1の構成)によって達成される。
上記の構成によれば、測定用の装置をステアリングホイールに取り付ける必要がなく、操作者はステアリングホイールに取り付けられた装置を介することなくステアリングホイールを操作することができる。よって、実際の操作状況にできるだけ近い測定状況を確保し、ステアリングホイールと操作者の手との間に作用する力を正確に測定することができる。
また、上記の構成によれば、操作者の指がステアリングホイールに押圧力を与える方向および該方向に垂直な他の一つの方向の少なくとも二つの方向について力センサにより力が検出され、少なくとも二つの方向の力に基づいて演算制御装置により作用力が演算される。操作者がステアリングホイールを手により把持して操作する際にステアリングホイールと手との間に作用する力を少なくとも二つの方向について測定することができる。特に、操作者が指によってステアリングホイールを把持して操作する場合には、操作者の指はステアリングホイールに押圧力を与える。従って、操作者がステアリングホイールを操作する際にステアリングホイールを把握する力を測定することができる。
また、上記の構成によれば、操作者が手によりステアリングホイールを把持していれば、力センサはステアリングホイールと指の第一関節との間に位置する。よって、操作者が手によりステアリングホイールを把持してステアリングホイールを操作する際に、指の第一関節及びその近傍にてステアリングホイールに与えられる力が力センサにより効率的に検出されるので、ステアリングホイールと手との間に作用する力を確実に測定することができる。また、ステアリングホイールの操作範囲が大きく、操作の過程で手によるステアリングホイールの把持位置が変化するような場合にも、作用力を確実に測定することができる。
更に、上記の構成によれば、測定用の装置をステアリングホイールに取り付けたり取り外したりする必要がない。よって、測定用の装置の取り付けや取り外しに起因してステアリングホイールを損傷することはなく、また、測定用の装置を取り付けるためにステアリングホイールを部分的に分解することも不要であり、作用力を能率的に測定することができる。
また、本発明によれば、上記の構成において、前記他の一つの方向は、指の長手方向を横切る方向であるよう構成される(請求項2の構成)。
上記の構成によれば、操作者の指がステアリングホイールに押圧力を与える方向、および該方向に垂直で指の長手方向を横切る方向の少なくとも二つの方向について力を検出し、それらの力に基づいて少なくとも二つの方向について作用力を求めることができる。
また、操作者がステアリングホイールを把持して操作する場合には、親指以外の四本の指を整列させて親指と四本の指との間にステアリングホイールを挟んで把持する。よって、整列する四本の指の長手方向を横切る方向へステアリングホイールを移動させる操作が行われる場合には、その操作によりステアリングホイールと手との間に作用する力を測定することができる。また、他の一つの方向が指の長手方向に垂直でなければ、整列する四本の指の長手方向へステアリングホイールを移動させる操作が行われる場合にも、その操作によりステアリングホイールと手との間に作用する力を測定することができる。
また、本発明によれば、上記の構成において、前記他の一つの方向は、指の長手方向を垂直に横切る方向であるよう構成される(請求項3の構成)。
上記の構成によれば、他の一つの方向は、操作者の指がステアリングホイールに押圧力を与える方向に垂直で指の長手方向にも垂直な方向である。よって、整列する四本の指の長手方向へステアリングホイールを移動させる操作が行われる場合には、他の一つの方向と操作の方向とが一致するので、その操作によりステアリングホイールと手との間に作用する力を正確に測定することができ、また作用力の演算も容易である。
また、本発明によれば、上記の構成において、ステアリングホイールは、回転軸線のまわりに回転操作されるものであり、前記演算制御装置は、前記少なくとも二つの方向の力に基づいて回転操作の周方向の作用力および前記回転軸線に沿う方向の作用力を演算するよう構成される(請求項4の構成)。
上記の構成によれば、例えば車両のステアリングホイールの如く、回転軸線のまわりに回転操作されるステアリングホイールについて、回転操作の周方向の作用力および回転軸線に沿う方向の作用力を測定することができる。
また、本発明によれば、上記の構成において、前記装着部材は、前記力センサが指の第一関節に対し予め設定された位置に位置するよう、指の第一関節に対し前記装着部材および前記力センサを位置決めする位置決め手段を有するよう構成される(請求項5の構成)。
上記の構成によれば、力センサが指の第一関節に対し予め設定された位置に位置するよう、位置決め手段により指の第一関節に対し装着部材および力センサが位置決めされる。よって、装着部材に位置決め手段が設けられていない場合に比して、指の第一関節に対する力センサの位置決めを容易にかつ正確に行うことができ、これにより作用力の測定を容易にかつ正確に行うことができる。
また、本発明によれば、上記の構成において、前記装着部材の指から押圧力を受ける部分は、力センサに対応する部位が他の部位よりも指の側へ高い「へ」の字形に屈曲した断面形状を有し、該断面形状は前記位置決め手段として機能するよう構成される(請求項6の構成)。
上記の構成によれば、装着部材の指から押圧力を受ける部分は、力センサに対応する部位が他の部位よりも指の側へ高い「へ」の字形に屈曲した断面形状を有し、該断面形状が位置決め手段として機能する。よって、「へ」の字形に屈曲した断面形状が設けられていない場合に比して、指の第一関節に対する力センサの位置決めを容易にかつ正確に行うことができる。
また本発明によれば、上記の構成において、前記装着部材は、前記装着部材が指に対し相対的に回転することを抑制する回転抑制手段を有するよう構成される(請求項7の構成)。
上記の構成によれば、装着部材が指に対し相対的に回転することが回転抑制手段によって抑制される。よって、装着部材に回転抑制手段が設けられていない場合に比して、装着部材が指に対し相対的に回転して力センサが本来あるべき位置より変位すること、およびこれに起因して作用力の測定精度が低下する虞れを低減することができる。
また、本発明によれば、上記の構成において、前記複数の指は、両手の全ての指であるよう構成される(請求項8の構成)。
上記の構成によれば、両手の全ての指がステアリングホイールに与える力を検出することができるので、複数の指が両手の全ての指の一部である場合に比して、ステアリングホイールと操作者の手との間に作用する力を正確に測定することができる。
また、本発明によれば、請求項1乃至8の何れか一つに記載の作用力測定装置を使用して、操作者が手により把持して操作するステアリングホイールと操作者の手との間に作用する力を測定する作用力測定方法であって、前記力検出装置を操作者の少なくとも一つの指に装着し、前記力検出装置により検出される少なくとも二つの方向の力に基づいて前記演算制御装置により作用力を演算させることを特徴とする作用力測定方法(請求項9の構成)によって達成される。
上記の構成によれば、本発明による作用力測定装置の特徴を有効に利用して、ステアリングホイールと操作者の手との間に作用する力を測定することができる。即ち、実際の操作状況にできるだけ近い測定状況を確保し、少なくとも二つの方向について作用力を正確に測定することができる。
また、操作範囲が大きく、操作の過程で手によるステアリングホイールの把持位置が変化するような場合にも、作用力を確実に測定することができる。また、測定用の装置の取り付けや取り外しに起因してステアリングホイールを損傷することはなく、また、測定用の装置を取り付けるためにステアリングホイールを部分的に分解することも不要であるので、作用力を能率的に測定することができる。
また、本発明によれば、上記の構成において、前記ステアリングホイールは、移動体を運転するために操作されるステアリングホイールであり、前記演算制御装置により前記移動体の移動パラメータと同期して作用力を記録するよう構成される(請求項10の構成)。
上記の構成によれば、移動体を運転するために操作されるステアリングホイールと操作者の手との間に作用する力を測定すると共に、その測定した値を移動体の移動パラメータと同期した値として記録することができる。
〔課題解決手段の好ましい態様〕
本発明の一つの好ましい態様によれば、上記の構成において、力センサは、操作者の指がステアリングホイールに押圧力を与える方向、該方向に垂直な他の方向、および該他の方向に垂直な更に他の方向の三つの方向について力を検出するよう構成される。
本発明の他の一つの好ましい態様によれば、上記の構成において、力センサは、ピエゾ抵抗型または静電容量型の薄板状の3軸力センサである。
本発明の他の一つの好ましい態様によれば、上記の構成において、ステアリングホイールは、車両において回転軸線のまわりに回転操作されるステアリングホイールである。
本発明の他の一つの好ましい態様によれば、上記の構成において、隣接する指の装着部材が互いに平面部にて当接することにより回転抑制手段の機能が達成されるよう構成される。
本発明の他の一つの好ましい態様によれば、上記の構成において、ステアリングホイールは移動体としての車両を運転するために操作されるステアリングホイールであり、移動パラメータは少なくとも操舵に関連するパラメータを含んでいるよう構成される。
本発明の他の一つの好ましい態様によれば、上記の構成において、力検出装置が指に取り付けられた後であって、操作者が手によりステアリングホイールを把持して操作する前の段階において、力センサの出力が示す力が0以外である場合には、その値にて力センサの出力を補正する初期化が行われるよう構成される。
以下に添付の図を参照しつつ、本発明を幾つかの好ましい実施形態について詳細に説明する。
[第一の実施形態]
図1は、指サック型の力検出装置を有し、車両のステアリングホイールにおける作用力を測定するよう構成された本発明による作用力測定装置の第一の実施形態を示す概略構成図である。
図1に於いて、10は作用力測定装置を全体的に示している。作用力測定装置10は、人の指の数である10個の力検出装置11〜20と、それぞれワイヤハーネス31〜40によって力検出装置11〜20と接続された演算制御装置50とを含んでいる。力検出装置11〜15は、図1には示されていない操作者の右手の親指、人差指、中指、薬指、小指に装着され、力検出装置16〜20は、操作者の左手の親指、人差指、中指、薬指、小指に装着される。
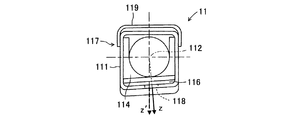
図2ないし図4は、第一の実施形態の右手の人差指用の力検出装置12のそれぞれ平面図、中央縦断面図、背面図である。
これらの図に於いて、121はアルミニウム合金の如き軽金属またはプラスチックの如き比較的硬質の樹脂にて形成されたケーシングを示している。ケーシング121は、軸線122に沿って延在する中空の実質的に矩形断面の筒状をなし、指先側の端部にて閉じられている。ケーシング121の掌側の面部121Aは、人差指の第一関節(遠位指節間関節)の位置123より指先側へ向かうにつれて軸線122より離れる方向へ傾斜し、また、位置123より指先側とは反対の側へ向かうにつれて軸線122より離れる方向へ傾斜している。
ケーシング121内には、指嵌合部材124が配置され、ケーシングの内面に接着等の手段により固定されている。指嵌合部材124は、低硬度ウレタン、ゴムスポンジの如き低剛性の弾性材にて形成されている。指嵌合部材124は、軸線122に沿って延在する空洞部125を有し、空洞部125は、人差指の第一関節のよりも先の領域の形状に対応する形状を有している。空洞部125は、人差指を周囲より僅かに押圧する状態で人差指を受け入れるよう、人差指の第一関節のよりも指先側の領域の大きさよりも僅かに小さく設定されている。
面部121Aと指嵌合部材124との間にてケーシング121内には、力伝達部材126が配置され、ケーシングの内面に接着等の手段により固定されている。力伝達部材126は、ケーシング121を構成する材料よりも高い弾性を有するが指嵌合部材124を構成する材料よりも高い剛性を有する材料、例えば、天然ゴムの如き高剛性の弾性材にて形成されている。
以上の説明より解る如く、力検出装置11は指嵌合部材124の空洞部125に操作者の人差指が挿入されることによりに人差指に装着される。従って、ケーシング121、指嵌合部材124および力伝達部材126等は、互いに共働して操作者の人差指に装着される装着部材127を構成している。
人差指の第一関節の位置123にて面部121Aの外面の幅方向中央には、例えば矩形の薄板状をなす3軸力センサ128が接着等の手段により固定されている。3軸力センサ128は、例えばピエゾ抵抗型や静電容量型の3軸力センサであることが好ましいが、x軸、y軸およびz軸の直交3軸に沿う方向の力を検出することができる任意のセンサであってよい。図示の実施形態に於いては、z軸は、軸線122に垂直で人差指より離れる方向、即ち人差指がステアリングホイールに対し及ぼす押圧力の方向に整合している。また、x軸は、図2の平面図で見て軸線122に垂直で親指より離れる方向に整合し、y軸は、軸線122に平行で人差指の指先の方向に整合している。
図3に示されている如く、3軸力センサ128の指先側の端部にはワイヤハーネス32が接続されており、ワイヤハーネス32はケーシング121の指先側を迂回して掌とは反対の側へ延在している。ケーシング121には実質的にコの字形の断面形状を有するワイヤハーネス保持板129が固定されており、ワイヤハーネス32はケーシング121と保持板129との間を経て人差指の付け根の側へ延在している。
詳細には図示されていないが、力検出装置13〜15は、力検出装置12と同様に構成されており、それぞれ操作者の右手の中指、薬指、小指に装着される装着部材137〜157と、3軸力センサ138〜158とを含んでいる。装着部材137〜157は、それぞれケーシング121、指嵌合部材124および力伝達部材126と同様のケーシング、指嵌合部材および力伝達部材を含んでいる。3軸力センサ138〜158のx軸、y軸およびz軸の方向は、右手の中指、薬指、小指に対し3軸力センサ128と同様の方向に設定されている。
図5ないし図7は、第一の実施形態の右手の親指用の力検出装置11のそれぞれ平面図、中央縦断面図、背面図である。
図5ないし図7と図2ないし図4との比較より解る如く、力検出装置11も力検出装置12〜15と同様に構成されており、操作者の右手の親指に装着される装着部材117と、3軸力センサ118とを含んでいる。装着部材117は、それぞれケーシング121、指嵌合部材124および力伝達部材126と同様のケーシング111、指嵌合部材114および力伝達部材116を含んでいる。しかし、3軸力センサ118のz軸は、他の指と同一の方向z′に対し右手の親指の中心軸の周りに僅かに人差指側にシフトした方向に設定されている。また、図5に示されている如く、3軸力センサ118のx軸は、z軸に沿って見て装着部材117の軸線112に垂直で人差指より離れる方向に整合し、y軸は、軸線112に平行で親指の付け根へ向かう方向に整合している。
図6に示されている如く、3軸力センサ118の指先側の端部にはワイヤハーネス31が接続されており、ワイヤハーネス31はケーシング111の指先側を迂回して掌とは反対の側へ延在している。ケーシング111には実質的にコの字形の断面形状を有するワイヤハーネス保持板119が固定されており、ワイヤハーネス31はケーシング111と保持板119との間を経て親指の付け根の側へ延在している。
詳細には図示されていないが、力検出装置16〜20は、それぞれ力検出装置11〜15と同様に構成されており、それぞれ操作者の左手の親指、人差指、中指、薬指、小指に装着される装着部材167〜207と、3軸力センサ168〜208とを含んでいる。装着部材167〜207は、それぞれケーシング121、指嵌合部材124および力伝達部材126と同様のケーシング、指嵌合部材および力伝達部材を含んでいる。また、装着部材167〜207は、各部品の形状がそれぞれ装着部材117〜157の部品の形状とは左右対称である点を除き、それぞれ装着部材117〜157と同様に構成されている。各指に対する3軸力センサ168〜208のx軸、y軸およびz軸の方向は、それぞれ3軸力センサ118〜158のx軸、y軸およびz軸の方向と同様の方向に設定されている。
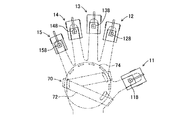
図8および図9に示されている如く、力検出装置11〜20が対応する指から抜け出すことを防止する保持装置70が設けられていることが好ましい。保持装置70は、例えばベルト72によって手の甲に取り付けられる保持板74と、保持板と各力検出装置のケーシングとの間に接続されたゴムバンドの如き弾性材76−1〜76−5とを含んでいる。なお、左手用の弾性材76−1〜76−10の図示は省略されている。
特に、親指以外の指の第二関節(近位指節間関節)と指の付け根の関節(中手指節関節)との間の部分に僅かに締め付けるよう装着されるリング78−2〜78−5が設けられ、各弾性材が対応するリングを経て延在していてよい。また、これらの指の3軸力センサに接続されたワイヤハーネスは、対応するリングを経て保持板へ延在していることが好ましい。なお、左手用のリング78−7〜78−10の図示は省略されている。
以上の説明より解る如く、各装着部材のケーシングおよび力伝達部材の実質的に「へ」の字形に屈曲した形状は、保持装置70の弾性材と共働して力検出装置を対応する指に対し適正な位置に位置決めし維持するための位置決め手段として機能する。この場合、位置決めは、3軸力センサの中心が対応する指の長手方向について第一関節の位置に位置し、対応する指の周方向について対応する指の中心線とステアリングホイールの中心軸線とを結ぶ線上に位置するよう、行われる。
また、各装着部材のケーシングおよび力伝達部材の実質的に「へ」の字形に屈曲した形状は、保持装置70の弾性材と共働して力検出装置が指のまわりに回転することを抑制する回転抑制手段として機能する。また、装着部材のケーシングは断面矩形をなし、操作者がステアリングホイールを操舵操作する際に、親指以外の四本の指のケーシングは側面の平面にて互いに当接するので、ケーシングの矩形の断面形状も力検出装置が指のまわりに回転することを抑制する回転抑制手段として機能する。
保持装置70の保持板74には、各3軸力センサよりの信号に対し増幅の如き必要な処理を行う電子回路80が設けられていてよい。なお、図1においては、この電子回路が力検出装置11〜20と演算制御装置50との間に設けられた増幅回路80として図示されている。
演算制御装置50は、制御部52、演算部54、記憶部56、表示部58を含み、スイッチ60が作業者によってオンに切り替えられることにより動作を開始する。なお、制御部52および演算部54は、例えば、各種のデータを計測し保存するデータロガー装置62の一部であってよく、記憶部56及び表示部58は、例えば、パーソナルコンピュータ64の一部であってよい。
データロガー装置62の制御部52には、力検出装置11〜20の3軸力センサ118〜208により検出され増幅回路80により増幅されたx軸、y軸およびz軸の力を示す信号がそれぞれワイヤハーネス31〜40を経て入力される。また、制御部52には、図には示されていない車両に搭載された各種のセンサにより検出された車両の走行に関するパラメータを示す信号が図には示されていないCANの如き伝送バスを経て入力される。
図示の実施形態においては、車両の走行に関するパラメータは、操舵角センサ84および操舵トルクセンサ86によりそれぞれ検出された操舵角θおよび操舵トルクTsを含んでいる。また、車速センサ88、前後加速度センサ90、横加速度センサ92によりそれぞれ検出された車速V、車両の前後加速度Gx、車両の横加速度Gyを含んでいる。なお、上記センサは必須ではなく、上記センサの何れかが省略されてもよい。また、車両の走行に関するパラメータとして、上記以外のパラメータ、例えば、図には示されていない車両の制動装置及び駆動装置に設けられた圧力センサおよびアクセル開度センサによりそれぞれ検出されたマスタシリンダ圧力およびアクセル開度等が含まれていてもよい。
力検出装置11〜20の3軸力センサにより検出されるx軸、y軸およびz軸の力をそれぞれ下記の表1の通りとする。なお、図1においては、iをx、yおよびzとして、力検出装置11〜20の3軸力センサにより検出されるx軸、y軸およびz軸の力がそれぞれFi1〜Fi10にて示されている。
図10に示されている如く、人が右手100及び左手102により被操作物であるステアリングホイール104を把握すると、各指はステアリングホイール104の円環部(リム部)104Aの一部を取り囲むよう延在する。従って、力検出装置11〜20の3軸力センサ118〜208のz軸の方向は、指及び円環部104Aを互いに接触する円筒とみなすと、3軸力センサの中心を通り二つの円筒の法線の方向である。また、3軸力センサ118〜208のx軸の方向は、ステアリングホイール104の回転軸線106を中心とする円環部104Aの周方向、即ち、各指と円環部104Aとの間にて回転軸線106の周りに作用する摩擦力の方向である。
<操舵力(保舵力)>
3軸力センサ118〜208により検出されるx軸方向の力Fx1〜Fx10に対する補正係数をそれぞれKx1〜Kx10とし、ステアリングホイール104を回転軸線106の周りに時計まわり方向へ回転させる力を正とする。左右の手100及び102によりステアリングホイール104を回転させる操舵力(ステアリングホイールの回転を阻止する保舵力)Fxr、Fxlは、それぞれ下記の式(1)及び(2)により表され、それらの総和Fxrlは下記の式(3)により表される。
Fxr=Kx1Fx1+Kx2Fx2+Kx3Fx3+Kx4Fx4+Kx5Fx5 …(1)
Fxl=Kx6Fx6+Kx7Fx7+Kx8Fx8+Kx9Fx9+Kx10Fx10 …(2)
Fxrl=Fxr−Fxl
=Kx1Fx1+Kx2Fx2+Kx3Fx3+Kx4Fx4+Kx5Fx5
(−Kx6Fx6+Kx7Fx7+Kx8Fx8+Kx9Fx9+Kx10Fx10) …(3)
なお、補正係数Kx1〜Kx10は、3軸力センサ118〜208のx軸の方向と回転軸線106を中心とする円環部104Aの周方向との間のずれ等を補償するための係数である。また、補正係数Kx1〜Kx10は、上記方向のずれの角度に基づいて設定されてもよく、また、実験的に求められてもよい。
<操舵トルク(保舵トルク)>
また、ステアリングホイール104の回転軸線106と3軸力センサ118および168との半径方向の距離をR1とし、ステアリングホイール104の回転軸線106と3軸力センサ128〜158および178〜208との半径方向の距離をR2とする。左右の手100及び102による操舵トルク(保舵トルク)Txr、Txlは、それぞれ下記の式(4)及び(5)により表され、それらの総和Txrlは下記の式(6)により表される。
Txr=Kx1Fx1R1+(Kx2Fx2+Kx3Fx3+Kx4Fx4+Kx5Fx5)R2 …(4)
Txl=Kx6Fx6R1+(Kx7Fx7+Kx8Fx8+Kx9Fx9+Kx10Fx10)R2 …(5)
Txrl=Fxr−Fxl
=Kx1Fx1R1+(Kx2Fx2+Kx3Fx3+Kx4Fx4+Kx5Fx5)R2
−{Kx6Fx6R1+(Kx7Fx7+Kx8Fx8+Kx9Fx9+Kx10Fx10)R2}
…(6)
また、ステアリングホイール104の回転軸線106と円環部104Aの断面中心との半径方向の距離をRとすると、左右両方の手100及び102による操舵トルク(保舵トルク)Txrlは、概略値として下記の式(7)により表される。
Txrl=(Fxr−Fxl)R
={Kx1Fx1R1+Kx2Fx2+Kx3Fx3+Kx4Fx4+Kx5Fx5
−(Kx6Fx6R1+Kx7Fx7+Kx8Fx8+Kx9Fx9+Kx10Fx10)}R
…(7)
<回転軸線に沿う力>
また、図11および図12は、それぞれ右手100および左手102がステアリングホイール104を把握した状態を、円環部104Aの軸線108に垂直な断面(ステアリングホイールの径方向の断面)にて示している。なお、図11において、力Fx25F、Fy25、Fz25は、それぞれ力Fx2〜Fx5の和、力Fy2〜Fy5の和、力Fz2〜Fz5の和を示している。また、図12において、力Fx710、Fy710、Fz710は、それぞれ力Fx7〜Fx10の和、Fy7〜Fy10の和、力Fz7〜Fz10の和を示している。
図11の断面で見て、力Fy1およびFy25が車両の前後方向に対しなす角度をそれぞれα1およびα25とする。また、図12の断面で見て、力Fy6およびFy710が車両の前後方向に対しなす角度をそれぞれα6およびα710とする。
右手100の親指が回転軸線106に沿ってステアリングホイール104の円環部104Aを運転者の側へ及ぼす力Fa1は、図11において下向きの力であるので、下記の式(8)により表される。
Fa1=Fy1・cosα1−Fz1・sinα1 …(8)
同様に、右手100の親指以外の4本の指が回転軸線106に沿ってステアリングホイール104の円環部104Aを運転者の側へ及ぼす力Fa25は、下記の式(9)により表される。
Fa25=−Fy25・cosα25+Fz25・sinα25 …(9)
よって、右手100が回転軸線106に沿ってステアリングホイール104の円環部104Aを運転者の側へ及ぼす力Farは、下記の式(10)により表される。
Far=Fa1+Fa25
=Fy1・cosα1−Fz1・sinα1−Fy25・cosα25+Fz25・sinα25 …(10)
また、左手102の親指が回転軸線106に沿ってステアリングホイール104の円環部104Aを運転者の側へ及ぼす力Fa6は、図12において下向きの力であるので、下記の式(11)により表される。
Fa6=Fy6・cosα6−Fz6・sinα6 …(11)
同様に、左手102の親指以外の4本の指が回転軸線106に沿ってステアリングホイール104の円環部104Aを運転者の側へ及ぼす力Fa710は、下記の式(12)により表される。
Fa710=−Fy710・cosα710+Fz710・sinα710 …(12)
よって、右手100が回転軸線106に沿ってステアリングホイール104の円環部104Aを運転者の側へ及ぼす力Falは、下記の式(13)により表される。
Fal=Fa6+Fa710
=Fy6・cosα6−Fz6・sinα6−Fy710・cosα710+Fz710・sinα710
…(14)
従って、左右の手100および102が回転軸線106に沿ってステアリングホイール104の円環部104Aを運転者の側へ及ぼす力Faは、下記の式(15)により表される。なお、力Fy25およびFy710は、それぞれ下記の式(16)および(17)により表され、力Fz25およびFz710は、それぞれ下記の式(18)および(19)により表される。
Fa=Far+Fal
=Fy1・cosα1−Fz1・sinα1−Fy25・cosα25+Fz25・sinα25
+Fy6・cosα6−Fz6・sinα6−Fy710・cosα710+Fz710・sinα710
…(15)
Fy25=Fy2+Fy3+Fy4+Fy5 …(16)
Fy710=Fy7+Fy8+Fy9+Fy10 …(17)
Fz25=Fz2+Fz3+Fz4+Fz5 …(18)
Fz710=Fz7+Fz8+Fz9+Fz10 …(19)
なお、力Faがステアリングホイール104の円環部104Aに対し回転軸線に沿って作用しても、これに対抗する力が車体よりステアリング系を介して作用し、円環部104Aは移動しない。よって、力Faが大きくなると、ステアリング系において発生しステアリングホイール104の回転を阻害する摩擦力が大きくなる。
<前後力>
図13に示されている如く、水平方向に対する回転軸線106の傾斜角をβとすると、回転軸線106に沿う力Faがステアリングホイール104の円環部104Aを車両の後方へ及ぼす力Faxは、下記の式(20)により表される。
Fax=Fa・cosβ …(20)
また、図10に示されている如く、右手100の中心100Aおよび左手102の中心102Aと回転軸線106とを結ぶ直線110Rおよび110Lが回転軸線106を通る鉛直面106Cとなす角度をそれぞれγrおよびγlとする。右手100のx軸方向の力Fx1およびFx25がステアリングホイール104の円環部104Aを車両の後方へ及ぼす力Fxrは、下記の式(21)により表される。
Fxr=Fx1・sinγr・sinβ+Fx25・sinγr・sinβ
=(Fx1+Fx25)sinγr・sinβ …(21)
同様に、左手102のx軸方向の力Fx6およびFx710がステアリングホイール104の円環部104Aを車両の後方へ及ぼす力Fxlは、下記の式(22)により表される。
Fxl=Fx6・sinγl・sinβ+Fx710・sinγl・sinβ
=(Fx6+Fx710)sinγl・sinβ …(22)
従って、左右の手100および102がステアリングホイール104の円環部104Aを車両の後方へ及ぼす力Fhxは、下記の式(23)により表される。
Fhx=Fax+Fxr+Fxl
=Fa・cosβ+(Fx1+Fx25)・sinγr・sinβ
+(Fx6+Fx710)・sinγl・sinβ …(23)
<左右力>
右手100の親指がステアリングホイール104の円環部104Aをステアリングホイールの径方向の右方へ及ぼす力Fhy1は、図11において右向きの力であるので、下記の式(24)により表される。
Fhy1=Fy1・sinα1+Fz1・cosα1 …(24)
同様に、右手100の親指以外の4本の指がステアリングホイール104の円環部104Aをステアリングホイールの径方向の右方へ及ぼす力Fhy25は、下記の式(25)により表される。
Fhy25=−Fy25・sinα25−Fz25・cosα25 …(25)
よって、右手100がステアリングホイール104の円環部104Aをステアリングホイールの径方向の右方へ及ぼす力Fhyrは、下記の式(26)により表される。
Fhyr=Fhy1+Fhy25
=Fy1・sinα1+Fz1・cosα1−Fy25・sinα25−Fz25・cosα25 …(26)
また、左手102の親指がステアリングホイール104の円環部104Aをステアリングホイールの径方向の右方へ及ぼす力Fhy6は、図12において右向きの力であるので、下記の式(27)により表される。
Fhy6=−Fy6・sinα6−Fz6・cosα6 …(27)
同様に、左手102の親指以外の4本の指が線ステアリングホイール104の円環部104Aをステアリングホイールの径方向の右方へ及ぼす力Fhy710は、下記の式(28)により表される。
Fhy710=Fy710・sinα710+Fz710・cosα710 …(28)
よって、右手100がステアリングホイール104の円環部104Aをステアリングホイールの径方向の右方へ及ぼす力Fhylは、下記の式(29)により表される。
Fhyl=Fhy6+Fhy710
=−Fy6・sinα6−Fz6・cosα6+Fy710・sinα710+Fz710・cosα710
…(29)
従って、左右の手100および102がステアリングホイール104の円環部104Aを右方向へ及ぼす力Fhyは、下記の式(30)により表される。
Fhy=Fhyr・cosγr+Fhyl・cosγl
=(Fy1・sinα1+Fz1・cosα1−Fy25・sinα25−Fz25・cosα25)cosγr
+(−Fy6・sinα6−Fz6・cosα6+Fy710・sinα710+Fz710・cosα710)
・cosγl …(30)
なお、回転軸線106に沿う力Faの場合と同様に、力Fhyがステアリングホイール104の円環部104Aに対し横方向へ作用しても、これに対抗する力が車体よりステアリング系を介して作用し、円環部104Aは移動しない。よって、力Fhyが大きくなると、ステアリング系において発生しステアリングホイール104の回転を阻害する摩擦力が大きくなる。
<演算制御装置の動作>
スイッチ60が作業者によってオンに切り替えられると、データロガー装置62の制御部52は、力検出装置11〜20および操舵角センサ84等のセンサより予め設定された順序にて信号を取り込む。演算部54は、上記各式に従って操舵力(保舵力)Fxrlまたは操舵トルク(保舵トルク)Txrl、回転軸線に沿う力Faまたは前後力Fhx、左右力Fhyを演算する。
また、パーソナルコンピュータ64の記憶部56は、予め設定された時間毎に演算部54により演算された値を、これらの値と同期して操舵角センサ84等のセンサにより検出された値と共に記憶する。表示部58は、例えば図14に示されている如く、演算部54により演算された値および操舵角センサ84等のセンサにより検出された値をグラフとして表示する。
<力測定の手順>
上述の如く構成された作用力測定装置10を用いて行われる車両のステアリングホイールにおける作用力の測定は、以下の手順にて実行され、これにより本発明による作用力測定方法の第一の実施形態が実行される。
まず、図には示されていない車両を運転する操作者が車両に搭乗する。リング78−2〜78−5および78−7〜78−10が、操作者の親指以外の指の第二関節と指の付け根の関節(中手指節関節)との間の部分に僅かに締め付けるよう装着される。また、力検出装置11〜20が左右の手の対応する10本の指に装着され、保持板74がベルト72によって手の甲に取り付けられる。そして、必要に応じて弾性材76−1〜76−10の付勢力が調節される。
次いで、演算制御装置50のスイッチ60が作業者によってオンに切り替えられ、その時の各3軸力センサの検出値が求められる。もし検出値が0でないならば、その値を補正値として各3軸力センサの検出値が0になるようセンサの出力が補正されることにより、各3軸力センサの初期化が行われる。以上の手順により作用力測定の準備が完了する。なお、上記3軸力センサの初期化は省略されてもよい。
操作者は車両のエンジンを始動し、左右の手によりステアリングホイールを所定の位置にて把握した状態で車両の走行を開始する。操作者は測定項目に則して車両を加減速させながら操舵操作を行う。その間に、各3軸力センサにより検出された力に基づいて演算制御装置50により上述の如く種々の作用力が演算され、種々のセンサにより検出された値と共に記録される。測定項目についての必要な運転操作が終了すると、作業者によってスイッチ60がオフに切り替えられ、作用力の測定が終了する。なお、力の測定は、車両が静止した状態にて行われてもよく、また、車両が走行試験台に載せられた状態にて行われてもよい。
[第二の実施形態]
図15は、指輪型の力検出装置を有し、車両のステアリングホイールにおける作用力を測定するよう構成された本発明による作用力測定装置の第二の実施形態を示す概略構成図である。
図15と図1との比較より解る如く、この実施形態の作用力測定装置110は、第一の実施形態の作用力測定装置10の指サック型の力検出装置11〜20が、指輪型の力検出装置211〜220に置き換えられている点を除き、作用力測定装置10と同一である。
図16ないし図18は、第二の実施形態の右手の人差指用の力検出装置212のそれぞれ平面図、中央縦断面図、背面図である。
これらの図に於いて、221はプラスチックの如き比較的硬質の樹脂にて形成されたケーシングを示している。ケーシング221は、軸線222Dに沿って延在する中空の実質的に矩形断面の筒状をなす先端側部分221Dと、軸線222Dと交差する軸線222Pに沿って延在する中空の実質的に矩形断面の筒状をなす付け根側部分221Pとを有している。先端側部分221Dは指先側の端部においても開いている。ケーシング221の掌側の面部221Aは、人差指の第一関節の位置223より指先側へ向かうにつれて軸線222Pより離れる方向へ傾斜し、また、位置223より指先側とは反対の側へ向かうにつれて軸線222Dより離れる方向へ傾斜している。
先端側部分221Dおよび付け根側部分221Pは、面部221A以外の部分においては互いに分離されている。換言すれば、先端側部分221Dおよび付け根側部分221Pは、第一関節の位置223の領域において面部221Aにより互いに接続されている。また、先端側部分221Dおよび付け根側部分221Pは、第一関節の位置223の両側の領域における面部221Aの弾性変形により、軸線222Dおよび222Pの交差角が変化するよう、互いに他に対し変位し得るようになっている。
先端側部分221Dは、下端にて面部221Aと一体をなす二つの側面部221DLおよび221DRと、一方の側縁にて側面部221DLの上端と一体をなす天井面部221DTとを有している。天井面部221DTの上面にはドーム形のワイヤハーネスガイド221DGが設けられており、天井面部221DTの他方の側縁にはフック221DFが設けられている。側面部221DRの上端近傍には、フック221DFが係合することにより天井面部221DTの他方の側縁が側面部221DRの上端に係合した状態に維持するための突起221DEが設けられている。
図19に示されている如く、フック221DFが突起221DEに係合していない自由状態においては、二つの側面部221DLおよび221DRは面部221Aより離れるにつれて互いの間隔が増大するよう延在する。従って、自由状態においては、天井面部221DTの他方の側縁は、側面部221DRの上端より離れた状態になり、先端側部分221Dの断面形状は、閉じた矩形ではなく、開いた矩形である。
なお、図示の実施形態においては、天井面部221DTの他方の側縁は、フック221DFおよび突起221DEにより側面部221DRの上端に固定されるようになっているが、マジックテープ(登録商標)の如き他の固定構造により固定されてもよい。また、天井面部221DTが側面部221DLおよび221DRの上端の間に渡設されたゴムバンドの如き弾性材に置換されてもよい。
先端側部分221D内には、指嵌合部材224Dが配置され、先端側部分221Dの側面部221DLおよび221DRの内面に接着等の手段により固定されている。指嵌合部材224Dも、低硬度ウレタン、ゴムスポンジの如き低剛性の弾性材にて形成されている。指嵌合部材224Dは、軸線222Dに沿って延在し上縁部にて開いた空洞部225Dを有し、空洞部225Dは、人差指の第一関節のよりも先の領域の形状に実質的に対応する形状を有している。空洞部225Dは、先端側部分221Dが閉じた矩形の断面形状にあるときには、人差指の第一関節のよりも先の領域の大きさよりも僅かに小さくなり、人差指を周囲より僅かに押圧する状態で人差指を受け入れるよう、設定されている。
付け根側部分221Pも先端側部分221Dと同様に構成されている。即ち、付け根側部分221Pは、それぞれ側面部221DL、221DRおよび天井面部221DTに対応する側面部221PL、221PRおよび天井面部221PTを有している。また、付け根側部分221Pは、フック221DFおよび突起221DEに対応するフック221PFおよび突起221PE有している。更に、付け根側部分221Pは、指嵌合部材224Dに対応する指嵌合部材224P有している。
面部221Aの内面には、面部221Aの全長にわたり延在する力伝達部材226が接着等の手段により固定されている。よって、力伝達部材226は、面部221Aと指嵌合部材224Dとの間にて先端側部分221D内に延在すると共に、面部221Aと指嵌合部材224Pとの間にて先端側部分221P内に延在している。力伝達部材126は、ケーシング221を構成する材料よりも弾性が高いが指嵌合部材224D、224Pを構成する材料よりも剛性が高い材料、例えば、天然ゴムの如き高剛性の弾性材にて形成されている。
以上の説明より解る如く、力検出装置211は指嵌合部材224D、224Pの空洞部225D、225Pに操作者の人差指が挿入され、フック221DF、221PFがそれぞれ突起221DE、221PEに係合せしめられることによりに人差指に装着される。従って、ケーシング221、指嵌合部材224D、224Pおよび力伝達部材226等は、互いに共働して操作者の人差指に装着される装着部材227を構成している。
人差指の第一関節の位置223にて面部221Aの外面の幅方向中央には、第一の実施形態の3軸力センサ128と同様の3軸力センサ228が接着等の手段により固定されている。3軸力センサ228のx軸、y軸およびz軸の方向は、第一の実施形態の3軸力センサ128のx軸、y軸およびz軸の方向と同一に設定されている。
3軸力センサ228の指先側の端部にはワイヤハーネス232が接続されており、ワイヤハーネス232はケーシング221の先端側部分221Dの側部を迂回して掌とは反対の側へ延在している。また、ワイヤハーネス232は、先端側部分221Dおよび付け根側部分221Pの天井面部221DTおよび221PTに設けられたワイヤハーネスガイド221DGおよび221PGに挿通されている。
詳細には図示されていないが、力検出装置213〜215は、力検出装置212と同様に構成されており、それぞれ操作者の右手の中指、薬指、小指に装着される装着部材237〜257と、3軸力センサ238〜258とを含んでいる。また、力検出装置217〜220は、それぞれ力検出装置212〜215と同様に構成されており、それぞれ操作者の左手の人差指、中指、薬指、小指に装着される装着部材277〜307と、3軸力センサ268〜308とを含んでいる。
また、右手および左手の親指用の力検出装置211および216は、力検出装置212と同様に構成されており、それぞれ操作者の右手および左手の親指に装着される装着部材217および267と、3軸力センサ218および268とを含んでいる。3軸力センサ218および268のx軸、y軸およびz軸の方向は、第一の実施形態の3軸力センサ118および168のx軸、y軸およびz軸の方向と同一に設定されている。ただし、第一の実施形態の場合と同様に、3軸力センサ118および268のz軸は、他の指と同一の方向z′に対し親指の中心軸の周りに僅かに人差指側にシフトした方向に設定されている。また、3軸力センサ218および268のx軸は、z軸に沿って見て人差指より離れる方向に整合し、y軸は、親指の付け根へ向かう方向に整合している。
なお、第二の実施形態においては、第一の実施形態における保持装置70は設けられていないが、第一の実施形態における保持装置70と同様に力検出装置211〜220が対応する指から抜け出すことを防止する保持装置が設けられてもよい。また、保持装置が例えば親指の如く一部の指についてのみ設けられてもよい。
力検出装置211〜220は、第一の実施形態の力検出装置11〜20と同様にx軸、y軸およびz軸の力を検出する。また、演算制御装置50は、第一の実施形態の場合と同様に、制御部52、演算部54、記憶部56、表示部58を含み、力検出装置211〜220の検出結果に基づいて操舵力等を演算し、種々のセンサにより検出された値と共に記録する。
よって、第二の実施形態においては、力検出装置211〜220が左右の手の対応する10本の指に装着される点を除き、第一の実施形態の場合と同様の要領にて車両のステアリングホイールにおける作用力の測定が行われる。なお、力検出装置の装着は、装着部材217〜307のケーシングのフックが突起より外れた状態で付け根側部分および先端側部分に指が挿入され、3軸力センサが指に対し適正な位置に位置決めされた状態にてフックが突起に係合せしめられることにより行われる。
以上の説明より解る如く、第一および第二の実施形態によれば、被操作物としてのステアリングホイールに測定用の装置を取り付ける必要がなく、操作者はステアリングホイールに取り付けられた装置を介することなくステアリングホイールを操作することができる。よって、実際の操作状況にできるだけ近い測定状況を確保し、ステアリングホイールと操作者の手との間に作用する力を正確に測定することができる。
また、第一および第二の実施形態によれば、操作者の指がステアリングホイールに押圧力を与える方向および該方向に垂直で互いに垂直な二つの方向の三つの方向について力センサにより力が検出され、それらの力に基づいて作用力が演算される。これにより、操作者が車両を運転する際にステアリングホイールと手との間に作用する力として、操舵力(保舵力)、操舵トルク(保舵トルク)、ステアリングホイールの回転軸線に沿う力、前後力、左右力を測定することができる。
また、第一および第二の実施形態によれば、操作者が手によりステアリングホイールを把持していれば、力センサはステアリングホイールと指の第一関節との間に位置する。よって、ステアリングホイールの操作範囲が大きく、操作の過程でステアリングホイールの持ち替えが行われるような場合にも、必要な作用力を確実に測定することができる。
また、第一および第二の実施形態によれば、測定用の装置をステアリングホイールに取り付けたり取り外したりする必要がない。よって、測定用の装置の取り付けや取り外しに起因してステアリングホイールを損傷することはない。また、測定用の装置を取り付けるためにステアリングホイールを部分的に分解することも不要であるので、作用力を能率的に測定することができる。
特に、第一の実施形態によれば、力検出装置は指サック型であり、力検出装置が指から抜け出すことを防止する保持装置70が設けられている。従って、力センサを指に対し予め設定された位置に容易に位置決めすることができると共に、測定中に力センサが指の延在方向へ指に対し相対的に変位する虞れを低減することができる。
また、第二の実施形態によれば、力検出装置は指輪型であり、ケーシング221は、先端側部分221Dと付け根側部分221Pとを有し、これらの部分は第一関節の位置223の両側の領域における弾性変形により互いに他に対し変位可能である。従って、第一関節の屈曲の程度を比較的自由に変化させることができ、測定に際し力検出装置により操作者の指に与えられる拘束の度合を低くすることができる。
[第三の実施形態]
図20は、指サック型の力検出装置を有し、機械装置の揺動操縦捍における作用力を測定するよう構成された本発明による作用力測定装置の第三の実施形態を示す概略構成図である。
図20と図1との比較より解る如く、この実施形態の作用力測定装置310は、第一の実施形態の作用力測定装置10の指サック型の力検出装置16〜20が省略されている点を除き、作用力測定装置10と同一である。即ち、作用力測定装置310は、操作者が右手で機械装置400の被操作物である揺動操縦捍402を把握して支点404の周りに前後左右に揺動操作する際の作用力を測定するよう構成されている。
図20には示されていないが、操作者が左手で揺動操縦捍402を揺動操作する場合には、第一の実施形態の作用力測定装置10の力検出装置11〜15が省略される。また、揺動操縦捍402を揺動操作する際の作用力は、第二の実施形態の作用力測定装置210の指輪型の力検出装置211〜215または216〜220を使用して測定されてもよい。更に、機械装置400の揺動操縦捍402は、身体障害者用の車両の操縦捍、建設土木用の重機の操縦捍、各種産業機械の操縦捍の如く、揺動操作される任意の操縦捍であってよい。
なお、この実施形態の演算制御装置50の制御部52へ入力される運転パラメータは、機械装置400の運転に関するパラメータである。機械装置400が身体障害者用の車両の操縦捍である場合には、運転パラメータは第一および第二の実施形態の車両の走行パラメータと同様であってよい。また、機械装置400が建設土木用の重機や各種産業機械である場合には、運転パラメータは可動部材の速度、可動部材を駆動するための油圧の如きアクチュエータのパラメータなどであってよい。
また、この第三の実施形態における作用力の測定は、力検出装置11〜15が操作者の右手の指に装着され、その状態にて揺動操縦捍402が支点404の周りに前後左右に揺動操作されることにより行われる。そして、演算制御装置50は、第一の実施形態の場合と同様に、力検出装置211〜215の検出結果に基づいて前後力および左右力を演算し、演算結果を必要に応じて種々のセンサにより検出された値と共に記録する。なお、力検出装置16〜20である場合や、指輪型の力検出装置211〜215または216〜220である場合にも、作用力の測定の要領は同一である。
<前後力>
前後力、即ち、揺動操縦捍402を前後方向に揺動操作する力は、第一の実施形態の回転軸線に沿う力と等価である。換言すれば、図11を揺動操縦捍402の軸線に垂直な断面とみなし、円環部104Aおよび軸線108をそれぞれ揺動操縦捍402およびその軸線406とみなすことができる。
よって、右手の親指が軸線406に垂直に揺動操縦捍402を手前側へ及ぼす力Fjx1は、上記式(8)に対応する下記の式(31)により表される。
Fjx1=Fy1・cosα1−Fz1・sinα1 …(31)
同様に、右手の親指以外の4本の指が軸線406に垂直に揺動操縦捍402を手前側へ及ぼす力Fjx25は、上記式(9)に対応する下記の式(32)により表される。
Fjx25=−Fy25・cosα25+Fz25・sinα25 …(32)
従って、右手が軸線406に垂直に揺動操縦捍402を前後方向へ及ぼす力Fjxは、手前側への方向を正として、上記式(10)に対応する下記の式(33)により表される。
Fjx=Fjx1+Fjx25
=Fy1・cosα1−Fz1・sinα1+Fy25・cosα25+Fz25・sinα25 …(33)
<左右力>
右手の親指が軸線406に垂直に揺動操縦捍402を右方向へ及ぼす力Fjy1は、上記式(24)に対応する下記の式(34)により表される。
Fjy1=Fy1・sinα1+Fz1・cosα1 …(34)
同様に、右手の親指以外の4本の指が軸線406に垂直に揺動操縦捍402を右方向へ及ぼす力Fjy25は、上記式(25)に対応する下記の式(35)により表される。
Fjy25=−Fy25・sinα25−Fz25・cosα25 …(35)
よって、右手が軸線406に垂直に揺動操縦捍402を左右方向へ及ぼす力Fjyは、右方向を正として、上記式(26)に対応する下記の式(36)により表される。
Fjy=Fjy1+Fjy25
=Fy1・sinα1+Fz1・cosα1−Fy25・sinα25−Fz25・cosα25 …(36)
<揺動トルク>
揺動操縦捍402の支点404から力FjxおよびFjyの作用点406までの半径をRjとすると、前後方向の揺動トルクTjxおよび左右方向の揺動トルクTjyは、それぞれ下記の式(37)および(38)により表される。
Tjx=Fjx・Rj
=(Fy1・cosα1−Fz1・sinα1−Fy25・cosα25+Fz25・sinα25)Rj
…(37)
Tjy=Fjy・Rj
=(Fy1・sinα1+Fz1・cosα1−Fy25・sinα25−Fz25・cosα25)Rj
…(38)
なお、前後方向の揺動トルクTjxおよび左右方向の揺動トルクTjyは、それぞれ下記の式(39)および(40)に従って正確に演算されてもよい。下記の式(39)および(40)におけるRj11〜Rj15は、揺動操縦捍402の支点404から力検出装置211〜215の3軸力センサの中心までの半径である。
Tjx=(Fy1・cosα1−Fz1・sinα1)Rj11
+(−Fy2・cosα25+Fz2・sinα25)Rj12
+(−Fy3・cosα25+Fz3・sinα25)Rj13
+(−Fy4・cosα25+Fz4・sinα25)Rj14
+(−Fy5・cosα25+Fz5・sinα25)Rj15
…(39)
Tjy=(Fy1・cosα1+Fz1・cosα1)Rj11
−(Fy2・sinα25+Fz2・cosα25)Rj12
−(Fy3・sinα25+Fz3・cosα25)Rj13
−(Fy4・sinα25+Fz4・cosα25)Rj14
−(Fy5・sinα25+Fz5・cosα25)Rj15
…(40)
この第三の実施形態によれば、第一の実施形態の指サック型の力検出装置の構造を有効に利用して、被操作物が支点の周りに前後左右に揺動操作される揺動操縦捍について、前後方向および左右の作用力を測定することができる。そしてこの場合にも、実際の操作状況にできるだけ近い測定状況を確保することができるので、作用力を正確に測定し、操作者が覚える違和感を低減することができる。
また、揺動操縦捍に測定用の装置を取り付けたり取り外したりする必要がないので、測定用の装置の取り付けや取り外しに起因して被操作物を損傷することはない。また、測定用の装置を取り付けるために被操作物を部分的に分解することも不要であるので、作用力を能率的に測定することができる。
なお、第三の実施形態の修正例として、指サック型の力検出装置が第二の実施形態の指輪型の力検出装置に置き換えられることにより、第二の実施形態の作用力測定装置の構成が揺動操縦捍の作用力の測定に適用されてもよい。
以上の説明より解る如く、上述の各実施形態によれば、ケーシングおよび力伝達部材の実質的に「へ」の字形に屈曲した形状などによる位置決め手段により、力センサが指に対し予め設定された位置に位置するよう、指に対し装着部材および力センサが位置決めされる。よって、装着部材などに位置決め手段が設けられていない場合に比して、指に対する力センサの位置決めを容易にかつ正確に行うことができ、これにより作用力の測定を容易にかつ正確に行うことができる。
また、手によりステアリングホイールなどの被操作部材を把持する場合には、指の関節は曲げられた状態になる。上述の各実施形態によれば、ケーシングおよび力伝達部材は実質的に「へ」の字形に屈曲した形状を有する。よって、このことによっても作用力の測定が行われない現実の操舵状況に近い測定状況を確保し、被操作部材と操作者の手との間に作用する力を測定する際に操作者が覚える違和感を低減することができる。
また、上述の各実施形態によれば、ケーシングおよび力伝達部材の実質的に「へ」の字形に屈曲した形状やケーシングの矩形の断面形状などによる回転抑制手段により、装着部材が指に対し相対的に回転することが抑制される。よって、装着部材などに回転抑制手段が設けられていない場合に比して、装着部材が指に対し相対的に回転して力センサが本来あるべき位置より変位すること、およびこれに起因して作用力の測定精度が低下する虞れを効果的に低減することができる。
また、上述の各実施形態によれば、力センサは、ピエゾ抵抗型や静電容量型の3軸力センサの如き矩形の薄板状をなす3軸力センサである。よって、力センサが例えば単軸力センサが直交3軸方向に組み立てられた構造のものである場合に比して、力センサを薄く小型することができ、このことによっても測定状況を現実の操舵状況に近くすることができる。
更に、上述の各実施形態によれば、3軸力センサのx軸の方向は指の長手方向に垂直な方向であり、y軸の方向は指の長手方向に沿う方向である。よって、3軸力センサのx軸およびy軸の方向が指の長手方向およびそれに垂直な方向に対し傾斜している場合に比して、指の長手方向に垂直な方向の作用力を容易にかつ正確に測定することができ、また演算制御装置の演算負荷を低減することができる。
以上においては、本発明を特定の実施形態について詳細に説明したが、本発明は上述の実施形態に限定されるものではなく、本発明の範囲内にて他の種々の実施形態が可能であることは当業者にとって明らかであろう。
例えば、上述の各実施形態においては、3軸力センサのx軸の方向は指の長手方向に垂直な方向であり、y軸の方向は指の長手方向に沿う方向である。しかし、y軸およびx軸がそれぞれ指の長手方向およびそれに垂直な方向に対し傾斜していてもよい。
例えば、図21は、3軸力センサ410がそれぞれ指の延在方向および該方向に垂直な方向、即ち実施形態のy軸およびx軸の方向に対し角度ω傾斜したy′軸およびx′軸を有する場合を示している。3軸力センサ410により検出されるx′軸方向およびy′軸方向の力をそれぞれFx′およびFy′とすると、x軸方向およびy軸方向の力FxおよびFyをそれぞれ下記の式(41)および(42)により求めることができる。よって、y軸およびx軸がそれぞれ指の長手方向およびそれに垂直な方向に対し傾斜していてもよい。
Fx=Fx′・cosω+Fy′・sinω …(41)
Fy=−Fx′・sinω+Fy′・cosω …(42)
また、上述の各実施形態においては、3軸力センサのz軸の方向は、指及び被操作部材の断面形状を互いに接触する円筒とみなすと、3軸力センサの中心を通り二つの円筒の法線の方向である。しかし、y軸およびx軸の傾斜の場合と同様に、z軸の方向が法線の方向に対し傾斜していても三つの軸の方向の力に基づいて法線方向の力を求めることができる。よって、3軸力センサのz軸の方向は法線の方向に対し傾斜していてもよい。
また、力センサがz軸に垂直で指の延在方向に対し傾斜した軸を有していれば、実施形態のy軸の方向およびx軸の方向の両方の力を検出することができる。例えば、力センサがx′軸を有するがy′軸を有しない場合には、x軸方向およびy軸方向の力FxおよびFyをそれぞれ下記の式(43)および(44)により求めることができる。よって、3軸力センサが直交2軸の力を検出するセンサに置き換えられてもよい。また、3軸力センサが6軸力センサに置き換えられてもよい。
Fx=Fx′・cosω …(43)
Fy=−Fx′・sinω …(44)
また、上述の各実施形態においては、3軸力センサは被操作部材に直接当接するようになっているが、被操作部材に対する3軸力センサの摩擦係数が被操作部材に対する指の摩擦係数に近い値になるよう、例えば樹脂などにて力センサの表面がコーティングされてもよい。
また、上述の第一の実施形態においては、x軸方向の力Fx1〜Fx10がそれらに対しそれぞれ補正係数Kx1〜Kx10が乗算されることによって補正されるようになっている。しかし、y軸方向の力およびz軸方向の力もそれらに補正係数Kx1〜Kx10と同様の補正係数が乗算されることによって補正されるよう修正されてもよい。
また、上述の各実施形態においては、作用力は移動体としての車両のステアリングホイールなどの被操作部材を基準にした方向について測定されるようになっている。しかし、移動体はモータボートや小型漁船の如き船舶であってもよい。また、車両や船舶の如き移動体は移動時に姿勢変化するので、例えば何れかの力検出装置のジャイロセンサが組み込まれることにより、絶対空間の方向を基準に作用力が測定されるよう修正されてもよい。
また、上述の各実施形態においては、力検出装置は5本の指の全てに装着される。しかし、力検出装置は5本の指の全てに装着される必要はなく、少なくとも一つの指に装着されればよい。また、力センサが第一の関節の内側の位置に位置決めされるようになっているが、他の位置に位置決めされてもよく、一つの指に複数の力センサが使用されてもよい。
また、上述の各実施形態においては、操作者の各手と被操作部材との間に作用する力が測定されるようになっている。しかし、これらの力に加えて、両手が被操作部材を介して互いに打ち消し合うように作用する力が、例えば無駄な力や疲労をきたす力として測定されるよう修正されてもよい。