JP5963783B2 - Canバスモジュールおよび自動速度検出を有するマイクロコントローラ - Google Patents
Canバスモジュールおよび自動速度検出を有するマイクロコントローラ Download PDFInfo
- Publication number
- JP5963783B2 JP5963783B2 JP2013557739A JP2013557739A JP5963783B2 JP 5963783 B2 JP5963783 B2 JP 5963783B2 JP 2013557739 A JP2013557739 A JP 2013557739A JP 2013557739 A JP2013557739 A JP 2013557739A JP 5963783 B2 JP5963783 B2 JP 5963783B2
- Authority
- JP
- Japan
- Prior art keywords
- microcontroller
- frequency
- area network
- module
- controller area
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
- 238000001514 detection method Methods 0.000 title description 7
- 238000000034 method Methods 0.000 claims description 51
- 230000000630 rising effect Effects 0.000 claims description 8
- 238000012545 processing Methods 0.000 claims description 5
- 230000008878 coupling Effects 0.000 claims description 4
- 238000010168 coupling process Methods 0.000 claims description 4
- 238000005859 coupling reaction Methods 0.000 claims description 4
- 230000005540 biological transmission Effects 0.000 description 5
- 230000006870 function Effects 0.000 description 5
- 238000004891 communication Methods 0.000 description 4
- 238000010586 diagram Methods 0.000 description 4
- 230000008569 process Effects 0.000 description 3
- 238000011156 evaluation Methods 0.000 description 2
- 230000001360 synchronised effect Effects 0.000 description 2
- 239000000446 fuel Substances 0.000 description 1
- 238000005259 measurement Methods 0.000 description 1
- 230000007246 mechanism Effects 0.000 description 1
- 238000012986 modification Methods 0.000 description 1
- 230000004048 modification Effects 0.000 description 1
- 230000008450 motivation Effects 0.000 description 1
- 230000002093 peripheral effect Effects 0.000 description 1
- 230000002265 prevention Effects 0.000 description 1
- 238000012360 testing method Methods 0.000 description 1
Images


Classifications
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04L—TRANSMISSION OF DIGITAL INFORMATION, e.g. TELEGRAPHIC COMMUNICATION
- H04L25/00—Baseband systems
- H04L25/02—Details ; arrangements for supplying electrical power along data transmission lines
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04L—TRANSMISSION OF DIGITAL INFORMATION, e.g. TELEGRAPHIC COMMUNICATION
- H04L25/00—Baseband systems
- H04L25/02—Details ; arrangements for supplying electrical power along data transmission lines
- H04L25/0262—Arrangements for detecting the data rate of an incoming signal
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04L—TRANSMISSION OF DIGITAL INFORMATION, e.g. TELEGRAPHIC COMMUNICATION
- H04L9/00—Cryptographic mechanisms or cryptographic arrangements for secret or secure communications; Network security protocols
- H04L9/40—Network security protocols
Landscapes
- Engineering & Computer Science (AREA)
- Computer Networks & Wireless Communication (AREA)
- Signal Processing (AREA)
- Computer Security & Cryptography (AREA)
- Power Engineering (AREA)
- Debugging And Monitoring (AREA)
- Information Transfer Systems (AREA)
- Synchronisation In Digital Transmission Systems (AREA)
- Small-Scale Networks (AREA)
Description
本発明は、コントローラエリアネットワーク(CAN)モジュールを有するマイクロコントローラに関する。
コントローラエリアネットワーク(CAN)は、高レベルのセキュリティによって、分散型リアルタイム制御を効率的にサポートするシリアル通信プロトコルである。CANの用途は、高速デジタル通信ネットワークから低コスト多重配線まで及ぶ。CANは、リアルタイム用途のための高信頼性シリアルデータ通信バスである。CANは、1秒あたり最大1メガビットのデータレートで動作し、優れたエラー検出および閉じ込め性能を有し、元来は、自動車内において使用するために開発された。CANの背後にある動機は、自動車用電子機器、エンジン制御ユニット、センサ、横滑り防止システム等の相互運用性を改善する一方、配線用ハーネス重量および複雑性を低減させることによって、自動車をより信頼性があり、安全、かつ燃料効率的にするというものであった。CANの出現以来、産業オートメーションおよび自動車/トラック用途において、CANプロトコルが、広く普及している。騒音環境におけるCANバスのロバスト性ならびに故障状態の検出およびそこからの回復能力は、CANを産業制御機器、医療機器、試験機器、モバイルおよびポータブル機械、器具等と併用するために好適なものにしている。
本願明細書は、例えば、以下の項目も提供する。
(項目1)
マイクロコントローラの中のコントローラエリアネットワーク(CAN)モジュールを初期化するための方法であって、
該方法は、
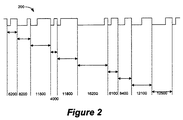
−CAN信号の複数の立ち下がりエッジまたは立ち上がりエッジの間の期間を測定することと、
−該期間をソートすることと、
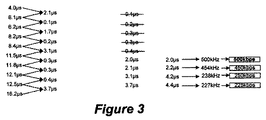
−該ソートされた期間のうちの隣接する期間の間の差値を決定することと、
−該差値をソートすることと、
−該ソートされた差値から第1の差値を選択し、該第1の差値から第1の周波数を決定することと、
−該選択された周波数を使用して、該CANモジュールを初期化することと、
−CAN信号フレームを受信することと、
−エラーが生じたか否かを決定することと、
−エラーが生じた場合、有効CAN周波数が見つけられるまで、次の周波数を選択し、該CANモジュールを初期化することを繰り返すことと
を含む、方法。
(項目2)
外部CANラインを前記マイクロコントローラの捕捉モジュールの入力と連結することをさらに含み、それにより、前記期間を測定する、項目1に記載の方法。
(項目3)
CAN信号を前記マイクロコントローラの捕捉モジュールの入力に内部的にフィードすることをさらに含み、それにより、前記期間を測定する、項目1に記載の方法。
(項目4)
前記差値をソートするステップの後に、
無効周波数をもたらす差値を破棄するステップをさらに含む、項目1に記載の方法。
(項目5)
タイマおよび捕捉ユニットを使用して、前記期間を測定する、項目1に記載の方法。
(項目6)
CAN信号の立ち下がりエッジの間の10の期間が測定される、項目3に記載の方法。
(項目7)
有効周波数が見つけられない場合、前記方法が繰り返される、項目1に記載の方法。
(項目8)
前記差値から周波数を決定するステップは、ルックアップテーブルを使用して行われる、項目1に記載の方法。
(項目9)
前記差値から周波数を決定するステップは、丸めまたは切り捨てを使用して周波数を計算する、項目1に記載の方法。
(項目10)
前記マイクロコントローラは、前記方法を行うようにプログラムされる、項目1に記載の方法。
(項目11)
前記マイクロコントローラは、前記方法を行う状態機械を備える、項目1に記載の方法。
(項目12)
マイクロコントローラであって、
該マイクロコントローラは、
中央処理ユニット(CPU)と、
コントローラエリアネットワーク(CAN)モジュールと、
タイマと、
該タイマと連結された捕捉モジュールと、
を備え、
該マイクロコントローラは、
−CAN信号の複数の立ち下がりエッジまたは立ち上がりエッジの間の期間を測定することと、
−該期間をソートすることと、
−該ソートされた期間についての隣接する期間の間の差を決定することと、
−第1の差を選択し、該第1の差から第1の周波数を決定することと、
−該選択された周波数を使用して、該CANモジュールを初期化することと、
−CAN信号フレームを受信することと、
−エラーが生じたか否かを決定することと、
−エラーが生じた場合、有効CAN周波数が見つけられるまで、次の周波数を選択し、該CANモジュールを初期化することを繰り返すことと
によって、CAN周波数を自動的に検出するように構成される、マイクロコントローラ。
(項目13)
前記マイクロコントローラは、無効周波数をもたらす差値を破棄するようにさら構成される、項目12に記載のマイクロコントローラ。
(項目14)
前記捕捉モジュールは、エッジ検出器を備え、該エッジ検出器は、前記タイマを捕捉レジスタと連結するドライバを制御する、項目12に記載のマイクロコントローラ。
(項目15)
制御可能ドライバを備え、該制御可能ドライバは、前記CANバスモジュールの入力と前記捕捉モジュールの入力との間に連結される、項目12に記載のマイクロコントローラ。
(項目16)
前記マイクロコントローラは、ルックアップテーブルを使用することによって、前記差値から周波数を決定するように構成される、項目12に記載のマイクロコントローラ。
(項目17)
前記マイクロコントローラは、丸めまたは切り捨てを使用して、前記差値から周波数を決定するように構成される、項目12に記載のマイクロコントローラ。
(項目18)
前記マイクロコントローラは、前記CAN周波数を決定するように、ソフトウェアによってプログラムされる、項目12に記載のマイクロコントローラ。
(項目19)
前記CAN周波数を決定するための状態機械を備える、項目12に記載のマイクロコントローラ。
(項目20)
前記状態機械を制御するための特殊機能レジスタを備える、項目19に記載のマイクロコントローラ。
Claims (15)
- マイクロコントローラの中のコントローラエリアネットワークモジュールを初期化するための方法であって、
該方法は、
−コントローラエリアネットワーク信号の連続的な立ち下がりエッジまたは連続的な立ち上がりエッジの間の時間を測定することを含み、
−該測定された時間をソートすることにより、第1のソートされたリストを提供することと、
−該ソートされたリストのうちの隣接する測定された時間の間の差値を決定することと、
−該差値をソートすることにより、第2のソートされたリストを提供することと、
−該第2のソートされたリストから第1の差値を選択し、該第1の差値から第1のビットレート周波数を決定することと、
−該選択されたビットレート周波数を使用して、該コントローラエリアネットワークモジュールを初期化することと、
−コントローラエリアネットワーク信号フレームを受信することと、
−エラーが生じたか否かを決定することと、
−エラーが生じた場合、有効コントローラエリアネットワーク周波数が見つけられるまで、次の周波数を選択し、該コントローラエリアネットワークモジュールを初期化することを繰り返すことと
によって特徴付けられる、方法。 - 外部コントローラエリアネットワークラインを前記マイクロコントローラの捕捉モジュールの入力と連結することにより、前記時間を測定することをさらに含む、請求項1に記載の方法。
- コントローラエリアネットワーク信号を前記マイクロコントローラの捕捉モジュールの入力に内部的にフィードすることにより、前記時間を測定することをさらに含む、請求項1に記載の方法。
- 前記差値をソートするステップの後に、
無効周波数をもたらす差値を破棄するステップをさらに含む、請求項1に記載の方法。 - タイマおよび捕捉ユニットは、前記時間を測定するために使用される、請求項1に記載の方法。
- コントローラエリアネットワーク信号の連続的な立ち下がりエッジまたは連続的な立ち上がりエッジの間の所定の数、特に10の時間が、測定される、請求項3に記載の方法。
- 有効周波数が見つけられない場合、前記方法が繰り返される、請求項1に記載の方法。
- 前記差値から周波数を決定するステップは、ルックアップテーブルを使用して行われる、請求項1に記載の方法。
- 前記差値から周波数を決定するステップは、丸めまたは切り捨てを使用して周波数を計算する、請求項1に記載の方法。
- 前記マイクロコントローラは、前記方法を行うようにプログラムされる、請求項1に記載の方法。
- 前記マイクロコントローラは、前記方法を行う状態機械を備える、請求項1に記載の方法。
- マイクロコントローラであって、
該マイクロコントローラは、
中央処理ユニットと、
コントローラエリアネットワークモジュールと、
タイマと、
該タイマと連結された捕捉モジュールと
を備え、
該マイクロコントローラは、請求項1〜11のいずれか一項に記載の方法を行うことによって、コントローラエリアネットワーク周波数を自動的に検出するように構成されている、マイクロコントローラ。 - 前記捕捉モジュールは、エッジ検出器を備え、該エッジ検出器は、前記タイマを捕捉レジスタと連結するドライバを制御する、請求項12に記載のマイクロコントローラ。
- 制御可能ドライバを備え、該制御可能ドライバは、コントローラエリアネットワークバスモジュールの入力と前記捕捉モジュールの入力との間に連結されている、請求項12に記載のマイクロコントローラ。
- 前記状態機械を制御するための特殊機能レジスタを備える、請求項12に記載のマイクロコントローラ。
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| US13/041,535 | 2011-03-07 | ||
| US13/041,535 US9338035B2 (en) | 2011-03-07 | 2011-03-07 | Microcontroller with can bus module and auto speed detect |
| PCT/US2012/026010 WO2012121881A1 (en) | 2011-03-07 | 2012-02-22 | Microcontroller with can bus module and auto speed detect |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2014511068A JP2014511068A (ja) | 2014-05-01 |
| JP2014511068A5 JP2014511068A5 (ja) | 2015-04-09 |
| JP5963783B2 true JP5963783B2 (ja) | 2016-08-03 |
Family
ID=45771950
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2013557739A Active JP5963783B2 (ja) | 2011-03-07 | 2012-02-22 | Canバスモジュールおよび自動速度検出を有するマイクロコントローラ |
Country Status (7)
| Country | Link |
|---|---|
| US (1) | US9338035B2 (ja) |
| EP (1) | EP2684323B1 (ja) |
| JP (1) | JP5963783B2 (ja) |
| KR (1) | KR101884925B1 (ja) |
| CN (1) | CN103416035B (ja) |
| TW (1) | TWI537742B (ja) |
| WO (1) | WO2012121881A1 (ja) |
Cited By (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US10656025B2 (en) | 2015-06-10 | 2020-05-19 | Ekos Corporation | Ultrasound catheter |
| US10926074B2 (en) | 2001-12-03 | 2021-02-23 | Ekos Corporation | Catheter with multiple ultrasound radiating members |
| US11672553B2 (en) | 2007-06-22 | 2023-06-13 | Ekos Corporation | Method and apparatus for treatment of intracranial hemorrhages |
| US11925367B2 (en) | 2007-01-08 | 2024-03-12 | Ekos Corporation | Power parameters for ultrasonic catheter |
Families Citing this family (9)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR20150128647A (ko) * | 2013-03-12 | 2015-11-18 | 마이크로칩 테크놀로지 인코포레이티드 | 클럭 복구를 위한 방법 및 장치 |
| TWI485407B (zh) * | 2013-07-05 | 2015-05-21 | Univ China Sci & Tech | Error Detection Method and System of CAN - BUS Communication Format for Embedded Oscilloscope |
| DE102016214279A1 (de) * | 2016-08-02 | 2018-02-08 | Robert Bosch Gmbh | Verfahren und Vorrichtung zum Betreiben eines Bussystems |
| US10615996B2 (en) * | 2018-03-14 | 2020-04-07 | Nxp B.V. | Apparatuses and methods for switching communication modes of a transceiver circuit |
| IT201800003980A1 (it) | 2018-03-26 | 2019-09-26 | Stmicroelectronics Application Gmbh | Procedimento di comunicazione, sistema, dispositivi, segnale e veicolo corrispondenti |
| US10892911B2 (en) * | 2018-08-28 | 2021-01-12 | Texas Instruments Incorporated | Controller area network receiver |
| WO2020142200A1 (en) * | 2019-01-02 | 2020-07-09 | Exxonmobil Research And Engineering Company | Multi-vehicle data logging device |
| EP3691197B1 (en) * | 2019-01-31 | 2021-12-29 | Nxp B.V. | Bus device and method for operating a bus device |
| IT202100005354A1 (it) | 2021-03-08 | 2022-09-08 | Stmicroelectronics Application Gmbh | Circuito microcontrollore, dispositivo, sistema e procedimento di funzionamento corrispondenti |
Family Cites Families (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH0357349A (ja) * | 1989-07-26 | 1991-03-12 | Fujitsu Ltd | 回線速度検出方式 |
| US5371766A (en) | 1992-11-20 | 1994-12-06 | International Business Machines Corporation | Clock extraction and data regeneration logic for multiple speed data communications systems |
| SE525273C2 (sv) | 2002-01-07 | 2005-01-18 | Kvaser Consultant Ab | Distribuerat styr- och övervakningssystem |
| SE533636C2 (sv) * | 2004-10-25 | 2010-11-16 | Xinshu Man L L C | Anordning vid bussförbindelse i CAN-system |
| TWI340882B (en) * | 2007-04-09 | 2011-04-21 | Novatek Microelectronics Corp | Real time clock integrated circuit and apparatus thereof |
| JP5064161B2 (ja) * | 2007-09-20 | 2012-10-31 | 株式会社オートネットワーク技術研究所 | 電子制御ユニット |
-
2011
- 2011-03-07 US US13/041,535 patent/US9338035B2/en active Active
-
2012
- 2012-02-21 TW TW101105695A patent/TWI537742B/zh active
- 2012-02-22 KR KR1020137025628A patent/KR101884925B1/ko active IP Right Grant
- 2012-02-22 WO PCT/US2012/026010 patent/WO2012121881A1/en active Application Filing
- 2012-02-22 CN CN201280012061.9A patent/CN103416035B/zh active Active
- 2012-02-22 JP JP2013557739A patent/JP5963783B2/ja active Active
- 2012-02-22 EP EP12706416.0A patent/EP2684323B1/en active Active
Cited By (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US10926074B2 (en) | 2001-12-03 | 2021-02-23 | Ekos Corporation | Catheter with multiple ultrasound radiating members |
| US11925367B2 (en) | 2007-01-08 | 2024-03-12 | Ekos Corporation | Power parameters for ultrasonic catheter |
| US11672553B2 (en) | 2007-06-22 | 2023-06-13 | Ekos Corporation | Method and apparatus for treatment of intracranial hemorrhages |
| US10656025B2 (en) | 2015-06-10 | 2020-05-19 | Ekos Corporation | Ultrasound catheter |
| US11740138B2 (en) | 2015-06-10 | 2023-08-29 | Ekos Corporation | Ultrasound catheter |
Also Published As
| Publication number | Publication date |
|---|---|
| JP2014511068A (ja) | 2014-05-01 |
| CN103416035B (zh) | 2016-04-06 |
| EP2684323B1 (en) | 2016-09-14 |
| KR101884925B1 (ko) | 2018-08-03 |
| TWI537742B (zh) | 2016-06-11 |
| EP2684323A1 (en) | 2014-01-15 |
| US9338035B2 (en) | 2016-05-10 |
| CN103416035A (zh) | 2013-11-27 |
| US20120233341A1 (en) | 2012-09-13 |
| TW201241637A (en) | 2012-10-16 |
| KR20140014202A (ko) | 2014-02-05 |
| WO2012121881A1 (en) | 2012-09-13 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5963783B2 (ja) | Canバスモジュールおよび自動速度検出を有するマイクロコントローラ | |
| KR100694034B1 (ko) | 데이터 전송률 자동 검출장치 | |
| JP6469365B2 (ja) | 汎用インタフェースを提供する方法、及び、汎用インタフェースを有するマイクロコントローラ | |
| US10742675B2 (en) | Fraudulent message detection device, electronic control apparatus equipped with fraudulent message detection device, fraudulent message detection method, and fraudulent message detection program | |
| CN110011870B (zh) | 用于对多主访问总线进行测量和信号分析的节点和方法 | |
| JP2007324679A (ja) | シリアル通信用ボーレートジェネレータ | |
| US9917705B2 (en) | Device and measuring method for ascertaining the internal delay time of a can bus connection unit | |
| US11665020B2 (en) | Detecting collisions on a network | |
| CN110535739B (zh) | 用于can总线网络的从节点 | |
| CN113544997B (zh) | 用于低频异步数据捕集的采样点识别 | |
| CN102355395B (zh) | 一种火灾报警系统总线通讯协议 | |
| CN112118083A (zh) | 一种单线半双工的通信方法、通信装置及设备 | |
| CN113886316A (zh) | 数据通信方法及相关装置、设备、系统和存储介质 | |
| JP5892890B2 (ja) | 通信制御装置 | |
| JP2008236217A (ja) | FlexRayネットワーク接続方法、FlexRayネットワーク及びFlexRayネットワーク用電子制御ユニット | |
| CN114301991B (zh) | 通信方法、设备、系统及计算机可读存储介质 | |
| CN113890838A (zh) | 一种基于icmp协议的网络连通性能判断方法 | |
| US10938507B2 (en) | Communication apparatus | |
| JP4031064B2 (ja) | リピータ装置 | |
| US11558219B2 (en) | Relay device | |
| EP3139545A1 (en) | Communication interface apparatus | |
| CN110209624A (zh) | 串行总线的数据传输方法和系统 | |
| JP2014075634A (ja) | 通信システム、通信速度自動検出装置、通信装置および通信速度設定方法 | |
| JP2018085583A (ja) | 通信装置、通信システム及び通信方法 | |
| JP2002135287A (ja) | 帯域制限回路、通信装置、通信ネットワークシステム、及び帯域制限方法 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20150220 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20150220 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20151105 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20151113 |
|
| A601 | Written request for extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A601 Effective date: 20160212 |
|
| A601 | Written request for extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A601 Effective date: 20160311 |
|
| A601 | Written request for extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A601 Effective date: 20160412 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20160510 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20160607 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20160628 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 5963783 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |