JP5932485B2 - ノイズリダクション装置及びノイズリダクション方法 - Google Patents
ノイズリダクション装置及びノイズリダクション方法 Download PDFInfo
- Publication number
- JP5932485B2 JP5932485B2 JP2012120138A JP2012120138A JP5932485B2 JP 5932485 B2 JP5932485 B2 JP 5932485B2 JP 2012120138 A JP2012120138 A JP 2012120138A JP 2012120138 A JP2012120138 A JP 2012120138A JP 5932485 B2 JP5932485 B2 JP 5932485B2
- Authority
- JP
- Japan
- Prior art keywords
- noise
- characteristic
- filter
- video signal
- visual
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images









Classifications
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N5/00—Details of television systems
- H04N5/14—Picture signal circuitry for video frequency region
- H04N5/21—Circuitry for suppressing or minimising disturbance, e.g. moiré or halo
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N17/00—Diagnosis, testing or measuring for television systems or their details
- H04N17/002—Diagnosis, testing or measuring for television systems or their details for television cameras
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N23/00—Cameras or camera modules comprising electronic image sensors; Control thereof
- H04N23/80—Camera processing pipelines; Components thereof
Description
前記入力映像信号と、前記ノイズ特性取得手段により取得された時間的なノイズ特性と、視覚の時間応答特性とに基づいて、前記入力映像信号に対する時間方向のノイズリダクションに用いるフィルタを生成するフィルタ設計手段と、
前記入力映像信号に対し、前記フィルタ設計手段により生成されたフィルタを用いて時間方向のノイズリダクション処理を行うフィルタ処理手段とを有し、
前記ノイズ特性取得手段は、露光することなく撮影することにより取得される映像信号から前記時間的なノイズ特性を取得するか、予め取得された複数の時間的なノイズ特性から、撮影条件に応じたノイズ特性を取得する。
前記視覚特性反映手段による出力に基づいてウィナーフィルタを生成する生成手段と、
生成された前記ウィナーフィルタで前記映像信号をフィルタ処理するフィルタ処理手段と
を備える。
本実施形態は、ノイズの時間特性及び視覚の時間周波数応答に基づき、時間方向ノイズリダクション処理のフィルタを設計する。具体的には、撮像機器のノイズの時間特性を取得し、時間視覚特性を乗算したノイズ特性と、ノイズのない理想的な映像の推定値とからウィナーフィルタを設計する。ノイズの時間特性は撮影時の条件に応じて一般に異なるため、撮影時のノイズ及び映像特性に応じた適応的なフィルタをノイズリダクションに適用できる。また、本発明では、フィルタ設計の際に視覚の時間応答特性を考慮するため、映像を人間の目で見た際にノイズリダクション効果があがるようにフィルタが設計される。
A/D変換部102は、被写体の光量をデジタル値に変換する。信号処理部103は、変換したデジタル値にデモザイキング処理、ホワイトバランス処理、ガンマ処理などを行う。その後、ノイズリダクション処理部105では、映像信号中のノイズ除去を行い、デジタル映像信号を生成する。D/A変換部104は、デジタル映像信号に対しアナログ変換を行う。エンコーダ部106は、デジタル映像信号をMpegなどのファイルフォーマットに変換する処理を行う。メディアインターフェース107は、パーソナルコンピュータ(PC)やその他メディア(例えば、ハードディスク、メモリーカード、CFカード、SDカード、USBメモリ)につなぐためのインターフェースである。CPU108は、各構成の処理全てに関わり、ROM109やRAM110に格納された命令を順に読み込み、解釈し、その結果に従って処理を実行する。また、ROM109とRAM110は、その処理に必要なプログラム、データ、作業領域などをCPU108に提供する。撮像系制御部111は、フォーカスを合わせる、シャッターを開く、絞りを調節するなどの、CPU108から指示された撮像系の制御を行う。操作部112は、ボタンやモードダイヤルなどが該当し、これらを介して入力されたユーザ指示を受け取る。キャラクタージェネレーション部113は、文字やグラフィックなどのコードの入力に対応した画像データを生成する。表示部114としては、一般的には液晶ディスプレイが広く用いられており、キャラクタージェネレーション部113やD/A変換部104から受け取った撮影画像や文字画像の表示を行う。また、表示部114はタッチスクリーン機能を有していても良く、その場合は、ユーザ指示を操作部111の入力として扱うことも可能である。なお、装置の構成要素は上記以外にも存在するが、本発明の主眼ではないので、説明を省略する。全部の実施形態で処理の対象となる映像信号はA/D変換部102によりディジタル化されたディジタル映像信号であり、これを映像信号と呼ぶ。この映像信号はディジタル信号であり、メモリ等にディジタルデータとして保存することができる。以下では映像信号やノイズ信号の保存などと記載する場合、それら信号の元となるディジタルデータが保存される。
図2は、図1のノイズリダクション処理部105の構成を示した概略構成図である。以下では、各処理部の概略について述べる。ノイズ特性取得部201では、撮像されたディジタル映像信号(撮影映像信号と呼ぶ)Vにのるノイズ信号の時間周波数特性(単に特性あるいは時間特性とも呼ぶ)Nを取得する。ノイズ特性Nは、ノイズの時間周波数特性を示す信号(ノイズ特性信号)である。ここで、撮影映像信号Vとは、ノイズリダクションを適用する対象となる映像信号であり、撮像機器により撮影された映像信号である。撮影映像信号Vはノイズを含んだ映像信号である。本実施形態では、ノイズ信号の特性として、映像信号そのものを取得するので本実施形態ではノイズ特性とはノイズのみを含む映像信号である。なお本発明はこれに限定されない。映像信号以外の特性を用いてフィルタを設計する場合は、実施形態4に記述する。映像特性取得部202では、撮影映像信号V及び取得されたノイズ信号の時間特性Nとから、ノイズレスの理想的な映像信号Sを推定する。ここで取得したいのは撮影した映像信号の時間周波数特性を示す映像特性信号であり、その信号として理想的な映像信号Sが推定される。次に、視覚特性反映部203では、取得されたノイズ特性N及び映像信号Sに対して視覚の時間周波数応答特性(時間視覚特性あるいは時間周波数視覚特性ともいう)をかけ、視覚対応映像信号Svtf及び視覚対応ノイズ特性Nvtfを得る。フィルタ設計部204では、視覚特性を考慮した映像信号Svtf及びノイズ特性Nvtfを入力とし、ノイズリダクションフィルタaを設計する。フィルタ処理部205では、撮影映像信号Vに対して、フィルタ設計部203にて設計されたフィルタaを適用し、撮影映像信号のノイズを低減する。
以下では、ノイズ特性取得部201の動作について詳細に述べる。ノイズリダクション処理部105の入力映像信号にのっているノイズは、その撮影条件、撮像センサの温度、前段の画像処理回路などに応じて、その時間特性が変化することが知られている。そのため、ノイズ特性取得部201では、撮影条件に応じて異なるノイズの時間特性を撮像センサから取得する。具体的には、カメラの撮影パラメータを撮影時の条件に設定したのち、レンズカバーを閉じた状態で露光せずに一定時間撮影を行う。ノイズ特性の取得は、たとえば操作者がレンズカバーを閉じてから操作部112によりノイズ特性の取得指示与えることをトリガとして開始される。そして、たとえばあらかじめ定めた時間にわたり映像信号がノイズ特性としてノイズ特性取得部201に入力される。以上の操作により撮影された映像には被写体が含まれないから、その映像信号はノイズ信号のみでありそこからノイズ特性のみを取得できる。以下では、このノイズ取得操作により得られたノイズ映像信号をN(x,y,t)と表記する。ここでx,yはたとえばフレーム中における画素の位置を示し、tは時間経過例えばフレーム番号を示すものと考えてもよい。ノイズの時間特性(時間周波数特性)とは、フレーム中の各画素位置に現れるノイズあるいはその平均値の周波数特性であるということもできる。
映像特性取得部202は、撮影映像信号V及び取得されたノイズ信号の時間特性Nとから、映像信号の特性を示す信号としてノイズレスの理想的な映像信号Sを推定する。ここで、撮影映像信号Vとは、フィルタ処理部205でフィルタ処理される映像信号である。本実施形態では、スペクトルサブトラクション法により映像信号Sを推定するが、本発明はこれに制限されない。
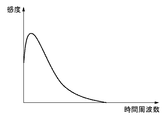
視覚特性反映部203では、ノイズ特性取得部201で取得されたノイズ特性N(x,y,t)及び、映像特性取得部202で取得された映像信号S(x,y,t)に対して、視覚の時間周波数応答特性をかける。ここで、視覚の時間周波数応答特性は図4のような応答をしており、例えば以下の式により表現される。
フィルタ設計部204では、視覚特性反映部203で得られたノイズ特性Nvtf及び映像信号Svtfを用いて、フィルタを設計する。具体的には、映像信号Svtfにノイズ特性Nvtfが加算された映像信号wに対して、映像信号wと映像信号Svtfとの二乗誤差が最小になるようなフィルタaを設計する。具体的なフィルタの算出方法を以下に説明する。
Ra = p
a = R-1p
と表わされる。ここでrの意味は、理想的な映像信号Svtfにノイズ信号Nvtfを加えて得た映像信号wに含まれる2つのフレーム間で対応する画素値の積のフレームにおける平均値である。行列RはN個のフレームを対象として、すべてのiとjとの組み合わせで決まるrの行列である。またpの意味は、映像信号wと理想的な映像信号Svtfとにそれぞれ含まれるフレーム間で対応する画素値の積のフレームにおける平均値である。行列pはN個のフレームを対象として、着目フレームの映像信号Svtfと、それよりiフレーム前の映像信号wとの組み合わせで決まるpの行列である。上述したようにSvtf,Nvtfは撮影した映像信号から得ることができるから、フィルタaもそれら信号から得ることができる。
実施形態1では、ノイズ特性を取得するために、撮像機器のレンズカバーを閉じた状態で撮影するという方法をとっており、撮影ごとにノイズ特性を取得するという工程が必要となっていた。これに対して本実施形態では、フィルタ設計の際に、予め取得しておいたノイズ特性を利用する。本実施形態では、ノイズ特性に影響の大きいISO感度に応じてあらかじめノイズの特性を幾通りか取得しておき、それを用いてウィナーフィルタを設計する。本実施形態では、撮影ごとにノイズ特性を撮影する工程が省略でき、スムーズに撮影を行えるという利点がある。以下では、実施形態1との差分に関して説明する。
以下では、ノイズ特性取得部201の動作について詳細に述べる。図7は、ノイズ特性取得部201の構成を示す模式図である。まず、撮影パラメータ取得部701では、撮影時のISO感度を取得する。次に、ノイズ特性データ選択部702では、撮影パラメータ取得部701で取得されたISO感度に対応するノイズ特性データN(x,y,t)を取得する。ノイズ特性データ選択部702の具体的な処理は、例えば、図8に示すようなノイズ特性テーブルを参照し、取得した撮影パラメータに関連付けられたノイズ特性データを取得してもよい。例えばISO感度800のノイズ特性データを取得する場合、図8のテーブルを参照し、ISO感度800に関連付けられたノイズ特性データが格納されているアドレス0xccccccを取得し、当該アドレスへアクセスすればよい。
実施形態1では、ノイズのない理想的な映像信号Sを、入力映像信号Vとノイズ特性Nとから推定していた。そのため、実施形態1では映像信号Sに対する推定誤差が不可避であり、映像によっては十分なノイズリダクション効果が得られない場合があった。そこで本実施形態では、ノイズのない理想的な映像信号Sを、事前に撮影されたリファレンス映像とし、ウィナーフィルタを設計する。ここで、リファレンス映像とは、ノイズが極力少ない映像のことである。例えば、明るい環境光のもとで低感度撮影された映像などがそれにあたる。本実施形態では、映像の特性に影響の大きいフレームレート及びシャッタースピードに応じてリファレンス映像をあらかじめ取得しておく。以下では、実施形態1からの差分に関して説明する。
映像特性取得部202では、ノイズレスのリファレンス映像SをROM109から取得する。図9は、映像特性取得部202の構成を表す模式図である。まず、撮影パラメータ取得部901では、撮影時のフレームレート及びシャッタースピードを取得する。次に、リファレンス映像取得部902では、前記取得されたフレームレート及びシャッタースピードに応じたリファレンス映像信号を、ROM109から取得する。その際は、フレームレート及びシャッタースピードの値と、リファレンス映像のアドレスが対応した参照テーブルを用いてデータを取得してもよい。こうして得られたリファレンス映像信号が実施形態1の理想的な映像信号Sとして用いられ、ノイズ特性取得部201で得られたノイズ特性N、あらかじめ与えられたヒトの視覚の時間周波数応答特性VTFと併せて、実施形態1の手順でノイズフィルタが生成される。また、保存するノイズ特性にVTFを適用してNvtfを計算したうえでパラメータ値と関連付けテーブルに保存しておいてもよい。こうすることで、実施形態1の数式3の下段の計算を、理想的な映像信号の保存時に実行するため、フィルタ生成時に行う必要がなくなり、所要時間の短縮化に貢献する。またパラメータとしてフレームレート及びシャッタースピードを用いる場合、撮像装置のこれらパラメータが固定されているなら理想的な映像信号Sも対応するひとつだけを保持すればよく、フィルタ生成のためにはその信号Sを用いる。
以上の実施形態では、ノイズの特性と映像の特性を用いて、ウィナーフィルタによりノイズリダクションに用いるフィルタを設計していた。しかしながら、前記方法では、フィルタの設計処理に多大な演算量がかかるという課題があった。そこで本実施形態では、予め設計され保存されたフィルタから、好適なノイズリダクションフィルタを選択する。具体的には、フィルタ設計に用いた映像特性及びノイズ特性と、撮影時の映像特性及びノイズ特性に関して、視覚特性を考慮した類似度を算出し、最も類似度が高いフィルタを選択する。ここで、ノイズリダクションのフィルタ候補は、予め前記実施形態と同様の方法で取得されていてもよいし、人手により設定されたフィルタでもよい。
以下では、ノイズ特性取得部201の動作について詳細に述べる。ノイズ特性取得部201ではまず、撮影条件に応じて異なるノイズの時間特性を撮像センサから取得する。具体的には、カメラの撮影パラメータを撮影時の条件に設定したのち、露光せずに一定時間撮影を行う。さらに、得られたノイズ映像N(x,y,t)を時間方向にフーリエ変換し、空間方向に平均化することでノイズ特性を得る。具体的には、以下の式でノイズ特性Np(f)が得られる。
映像特性取得部202では、撮影映像信号V及び前記取得されたノイズ信号の時間特性Nとから、ノイズレスの理想的な映像Sの時間周波数パワースペクトルの平均値を推定する。本実施形態では、スペクトルサブトラクション法により、理想的な映像信号Sの周波数パワースペクトルを推定する。映像信号Sの平均周波数パワースペクトルSp(f)は、具体的には以下の式で取得される。
以下では、視覚特性反映部203の動作について述べる。本実施形態では、周波数空間領域で視覚特性をかけることで、ノイズ特性Npv及び映像特性Spvに対して視覚特性を反映する。
以下では、フィルタ設計部204の構成について述べる。図10は、フィルタ設計部204の構成を示す模式図である。ここで、フィルタ候補の総数をMとし、それぞれF1、F2...FMと表す。フィルタ設計情報取得部1001では、各フィルタの設計に用いた映像特性に視覚特性を反映させたSf1, Sf2...SfMと、ノイズ特性に視覚特性を反映させたNf1, Nf2...NfMとをROM109から取得する。以下では、フィルタFmに対応する映像特性に視覚特性を反映させたデータをSfm、ノイズ特性に視覚特性を反映させたデータをNfm(m=1,2...M)として表記する。Sfm及びNfmは、数式12のSpv及びNpvと同様の方法で、フィルタFmの生成のために取得されたデータである。ノイズ特性類似度算出部1002では、取得したNf1, Nf2...NfMと、ノイズ特性取得部201にて取得したNpvとの類似度をそれぞれ計算する。また、映像特性類似度算出部1003では、前記取得したSf1, Sf2...SfMと、映像特性取得部202により取得されたSpvとの類似度を計算する。さらに、フィルタ選択部1004では、前記2つの類似度から、最適なフィルタを選択する。以下では、ノイズ特性類似度算出部1002、映像特性類似度算出部1003、フィルタ選択部1004の動作について詳細に述べる。なおSfmは、たとえばパラメータや撮影対象を変えて撮影して得た理想的な映像信号である。たとえば被写体の動きの緩やかな映像や、被写体の動きの速い映像など、動きベクトルの異なる複数の映像信号を取り混ぜて用いることが望ましい。またNfmは、たとえば撮影環境に応じて選択できるように、異なる環境(例えば温度)などにおいて、実施形態1の方法で撮影して得ることができる。これら信号を用いて、実施形態1の手順であらかじめフィルタを生成しておく。
以下では、ノイズ特性類似度算出部1002の動作について述べる。ノイズ特性類似度算出部1002では、フィルタm設計時のノイズ特性に視覚特性を反映させたデータNfm (m=1,2...M)と、撮影時のノイズ特性に視覚特性を反映させたデータNpvとの差の絶対値を類似度として算出する。具体的には、NfmとNpvとの類似度DNmは、
以下では、映像特性類似度算出部1003の動作について述べる。映像特性類似度算出部1003では、フィルタm設計時の映像特性に視覚特性を反映させたデータSfm (m=1,2...M)と、撮影時の映像特性に視覚特性を反映させたデータSpvとの差の絶対値を類似度として算出する。具体的には、映像特性Sfmと映像特性Spvとの類似度DSmは、
フィルタ選択部1004では、ノイズ特性類似度算出部1002で得た、ノイズ特性の視覚特性を考慮した類似度DNm(m=1,2...M)と、映像特性類似度算出部1003で得た、映像特性の視覚特性を考慮した類似度DSm(m=1,2...M)とを用いて、フィルタごとにスコアを計算する。そして、そのスコアが最良のフィルタを選択する。本実施形態では、DSmとDNmとの和により各フィルタのスコアを計算し、そのスコアが最小となるものを最適フィルタとして出力する。具体的には、最適なフィルタFnを与えるフィルタ番号nは、DSmとDNmとの和が最小となるようなmの値であり、以下の式により選択される。
また、本発明は、以下の処理を実行することによっても実現される。即ち、上述した実施形態の機能を実現するソフトウェア(プログラム)を、ネットワーク又は各種記憶媒体を介してシステム或いは装置に供給し、そのシステム或いは装置のコンピュータ(またはCPUやMPU等)がプログラムを読み出して実行する処理である。
Claims (9)
- 入力映像信号の時間的なノイズ特性を取得するノイズ特性取得手段と、
前記入力映像信号と、前記ノイズ特性取得手段により取得された時間的なノイズ特性と、視覚の時間応答特性とに基づいて、前記入力映像信号に対する時間方向のノイズリダクションに用いるフィルタを生成するフィルタ設計手段と、
前記入力映像信号に対し、前記フィルタ設計手段により生成されたフィルタを用いて時間方向のノイズリダクション処理を行うフィルタ処理手段と
を有し、
前記ノイズ特性取得手段は、露光することなく撮影することにより取得される映像信号から前記時間的なノイズ特性を取得するか、予め取得された複数の時間的なノイズ特性から、撮影条件に応じたノイズ特性を取得することを特徴とするノイズリダクション装置。 - 前記時間的なノイズ特性に応じたノイズ信号を前記入力映像信号から差し引くか、ノイズが少ない状態で取得し、保存された映像信号を取得するかによってノイズレス映像信号を取得する映像特性取得手段をさらに有し、
前記フィルタ設計手段は、前記ノイズレス映像信号と前記視覚の時間応答特性とに基づいて特定される第1信号と、前記入力映像信号と前記視覚の時間応答特性とに基づいて特定される第2信号とを用いて前記フィルタを設計する
ことを特徴とする請求項1に記載のノイズリダクション装置。 - 前記フィルタ設計手段は、前記時間的なノイズ特性と前記入力映像信号から特定される時間的な映像特性とのそれぞれに対して前記視覚の時間応答特性のたたみ込み演算もしくは乗算を行うことで、視覚特性が反映されたノイズ特性及び映像特性を取得し、当該視覚特性が反映されたノイズ特性及び映像特性を用いて前記フィルタを生成することを特徴とする請求項1または2に記載のノイズリダクション装置。
- 前記フィルタ設計手段は、前記視覚の時間応答特性が反映されたノイズ特性及び前記視覚の時間応答特性が反映された入力映像信号を用いてウィナーフィルタを生成し、
前記フィルタ処理手段は、前記フィルタ設計手段により生成された該ウィナーフィルタをノイズリダクションに用いるフィルタとすることを特徴とする請求項1乃至3のいずれか一項に記載のノイズリダクション装置。 - 前記フィルタ設計手段は、予め生成された複数のフィルタを、前記複数のフィルタそれぞれを生成する際に基とした、前記視覚の時間応答特性が反映されたノイズ特性及び前記視覚の時間応答特性が反映された映像特性と関連付けて保存し、前記入力映像信号の前記視覚の時間応答特性が反映された映像特性及びノイズ特性との類似度が高い前記ノイズ特性及び映像特性に関連付けられたフィルタをノイズリダクションに用いるフィルタとして選択することを特徴とする請求項1乃至3のいずれか一項に記載のノイズリダクション装置。
- ノイズ信号の時間周波数特性と撮影した映像信号の時間周波数特性とにそれぞれ視覚の時間周波数特性を反映させたノイズ信号及び映像信号、またはノイズ信号及び映像信号それぞれの時間周波数特性を出力する視覚特性反映手段と、
前記視覚特性反映手段による出力に基づいてウィナーフィルタを生成する生成手段と、
生成された前記ウィナーフィルタで前記映像信号をフィルタ処理するフィルタ処理手段と
を備えることを特徴とするノイズリダクション装置。 - 入力映像信号の時間的なノイズ特性を取得するノイズ特性取得工程と、
前記入力映像信号と、前記ノイズ特性取得工程により取得された時間的なノイズ特性と、視覚の時間応答特性とに基づいて、前記入力映像信号に対する時間方向のノイズリダクションに用いるフィルタを生成するフィルタ設計工程と、
前記入力映像信号に対し、前記フィルタ設計工程により生成されたフィルタを用いて時間方向のノイズリダクション処理を行うフィルタ処理工程と
を有し、
前記ノイズ特性取得工程では、露光することなく撮影することにより取得される映像信号から前記時間的なノイズ特性を取得するか、予め取得された複数の時間的なノイズ特性から、撮影条件に応じたノイズ特性を取得することを特徴とするノイズリダクション方法。 - ノイズ信号の時間周波数特性と撮影した映像信号の時間周波数特性とにそれぞれ視覚の時間周波数特性を反映させたノイズ信号及び映像信号、またはノイズ信号及び映像信号それぞれの時間周波数特性を出力する視覚特性反映工程と、
前記視覚特性反映工程による出力に基づいてウィナーフィルタを生成する生成工程と、
生成された前記ウィナーフィルタで前記映像信号をフィルタ処理するフィルタ処理工程と
を有することを特徴とするノイズリダクション方法。 - 請求項1乃至6のいずれか一項に記載のノイズリダクション装置の各手段としてコンピューターを機能させるためのプログラム。
Priority Applications (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2012120138A JP5932485B2 (ja) | 2012-05-25 | 2012-05-25 | ノイズリダクション装置及びノイズリダクション方法 |
| US13/870,221 US9307123B2 (en) | 2012-05-25 | 2013-04-25 | Noise reduction apparatus and noise reduction method |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2012120138A JP5932485B2 (ja) | 2012-05-25 | 2012-05-25 | ノイズリダクション装置及びノイズリダクション方法 |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2013247525A JP2013247525A (ja) | 2013-12-09 |
| JP2013247525A5 JP2013247525A5 (ja) | 2015-07-09 |
| JP5932485B2 true JP5932485B2 (ja) | 2016-06-08 |
Family
ID=49621322
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2012120138A Active JP5932485B2 (ja) | 2012-05-25 | 2012-05-25 | ノイズリダクション装置及びノイズリダクション方法 |
Country Status (2)
| Country | Link |
|---|---|
| US (1) | US9307123B2 (ja) |
| JP (1) | JP5932485B2 (ja) |
Families Citing this family (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP6465563B2 (ja) * | 2014-05-14 | 2019-02-06 | キヤノン株式会社 | 画像処理装置、画像処理方法およびプログラム |
| TWI536319B (zh) * | 2014-06-24 | 2016-06-01 | 瑞昱半導體股份有限公司 | 去雜訊方法以及影像系統 |
| JP6462281B2 (ja) * | 2014-09-08 | 2019-01-30 | 日本放送協会 | フリッカー低減装置 |
| US10812854B2 (en) * | 2015-05-19 | 2020-10-20 | Sony Corporation | Image processing device, image processing method, reception device, and transmission device |
| US20170078573A1 (en) * | 2015-11-27 | 2017-03-16 | Mediatek Inc. | Adaptive Power Saving For Multi-Frame Processing |
| US11216923B2 (en) * | 2018-05-23 | 2022-01-04 | Samsung Electronics Co., Ltd. | Apparatus and method for successive multi-frame image denoising |
| CN110418198B (zh) * | 2019-06-30 | 2021-05-18 | 联想(北京)有限公司 | 一种视频信息处理方法、电子设备及存储介质 |
| CN111507916B (zh) * | 2020-04-15 | 2023-04-28 | 南京富尔登科技发展有限公司 | 一种流水线上物品对象稳定图像获取方法 |
Family Cites Families (9)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH01248893A (ja) * | 1988-03-30 | 1989-10-04 | Toshiba Corp | 雑音除去装置 |
| US6907143B2 (en) * | 2001-05-16 | 2005-06-14 | Tektronix, Inc. | Adaptive spatio-temporal filter for human vision system models |
| JP2003333370A (ja) | 2002-05-10 | 2003-11-21 | Matsushita Electric Ind Co Ltd | 信号処理装置 |
| US7295616B2 (en) * | 2003-11-17 | 2007-11-13 | Eastman Kodak Company | Method and system for video filtering with joint motion and noise estimation |
| US7295103B2 (en) * | 2004-12-22 | 2007-11-13 | The Goodyear Tire & Rubber Company | Integrated sensor system and method for a farm tire |
| US8195001B2 (en) * | 2008-04-09 | 2012-06-05 | Intel Corporation | In-loop adaptive wiener filter for video coding and decoding |
| US8149336B2 (en) * | 2008-05-07 | 2012-04-03 | Honeywell International Inc. | Method for digital noise reduction in low light video |
| JP5202277B2 (ja) | 2008-12-18 | 2013-06-05 | キヤノン株式会社 | 撮像装置 |
| JP6082304B2 (ja) * | 2012-04-17 | 2017-02-15 | キヤノン株式会社 | 画像処理装置及びその処理方法 |
-
2012
- 2012-05-25 JP JP2012120138A patent/JP5932485B2/ja active Active
-
2013
- 2013-04-25 US US13/870,221 patent/US9307123B2/en active Active
Also Published As
| Publication number | Publication date |
|---|---|
| US20130314603A1 (en) | 2013-11-28 |
| US9307123B2 (en) | 2016-04-05 |
| JP2013247525A (ja) | 2013-12-09 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5932485B2 (ja) | ノイズリダクション装置及びノイズリダクション方法 | |
| WO2007114220A1 (ja) | 画像処理装置、および画像処理方法、並びにコンピュータ・プログラム | |
| JP2011135563A (ja) | 撮像装置および画像処理方法 | |
| JP2013242658A (ja) | 画像処理装置、撮像装置、画像処理方法、および画像処理プログラム | |
| JP2014021928A (ja) | 画像処理装置、画像処理方法およびプログラム | |
| JP2013125181A (ja) | 投影装置 | |
| JP6261205B2 (ja) | 画像処理装置 | |
| JP4479845B2 (ja) | 画像補正装置、画像補正方法、画像補正プログラム | |
| WO2019124289A1 (ja) | 装置、制御方法および記憶媒体 | |
| JP6800806B2 (ja) | 画像処理装置、画像処理方法およびプログラム | |
| JP2009055595A (ja) | 画素補間回路、およびプログラム | |
| JP5654860B2 (ja) | 画像処理装置及びその制御方法、プログラム | |
| JP2023100811A (ja) | 画像処理装置 | |
| US8600070B2 (en) | Signal processing apparatus and imaging apparatus | |
| JP2019016893A (ja) | 画像処理装置およびその制御方法及びプログラム | |
| JP2015177528A (ja) | 画像処理装置、画像処理方法、及びプログラム | |
| JP7183015B2 (ja) | 画像処理装置、画像処理方法、及びプログラム | |
| JP6904838B2 (ja) | 画像処理装置、その制御方法およびプログラム | |
| JP2012085205A (ja) | 画像処理装置、撮像装置、画像処理方法および画像処理プログラム | |
| JP6202989B2 (ja) | 画像処理装置、画像処理方法およびプログラム | |
| JP7214407B2 (ja) | 画像処理装置、画像処理方法、及びプログラム | |
| US8406558B2 (en) | Imaging apparatus, image processing apparatus, and image processing method | |
| JP2015088914A (ja) | 画像処理装置、画像処理方法およびプログラム | |
| JP2015097357A (ja) | 画像処理装置 | |
| JP6929185B2 (ja) | 画像処理装置及び画像処理方法、プログラム、記憶媒体 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20150522 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20150522 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20151225 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20160125 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20160316 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20160404 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20160428 |
|
| R151 | Written notification of patent or utility model registration |
Ref document number: 5932485 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R151 |