JP5915489B2 - 反射屈折型レンズ系および撮像装置 - Google Patents
反射屈折型レンズ系および撮像装置 Download PDFInfo
- Publication number
- JP5915489B2 JP5915489B2 JP2012221778A JP2012221778A JP5915489B2 JP 5915489 B2 JP5915489 B2 JP 5915489B2 JP 2012221778 A JP2012221778 A JP 2012221778A JP 2012221778 A JP2012221778 A JP 2012221778A JP 5915489 B2 JP5915489 B2 JP 5915489B2
- Authority
- JP
- Japan
- Prior art keywords
- lens
- catadioptric
- lens group
- concave
- convex
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
- 238000003384 imaging method Methods 0.000 title claims description 38
- 230000003287 optical effect Effects 0.000 claims description 51
- 230000014509 gene expression Effects 0.000 claims description 37
- 230000005499 meniscus Effects 0.000 claims description 18
- 230000005540 biological transmission Effects 0.000 claims description 7
- 230000002093 peripheral effect Effects 0.000 claims description 6
- 230000006641 stabilisation Effects 0.000 claims description 3
- 238000011105 stabilization Methods 0.000 claims description 3
- 230000004075 alteration Effects 0.000 description 100
- 238000010586 diagram Methods 0.000 description 35
- 201000009310 astigmatism Diseases 0.000 description 24
- 238000012545 processing Methods 0.000 description 19
- 238000000034 method Methods 0.000 description 14
- 230000007246 mechanism Effects 0.000 description 10
- 102220492401 Ribulose-phosphate 3-epimerase_L12A_mutation Human genes 0.000 description 9
- 230000000694 effects Effects 0.000 description 4
- 238000005516 engineering process Methods 0.000 description 4
- 238000006243 chemical reaction Methods 0.000 description 3
- 238000004904 shortening Methods 0.000 description 3
- 230000009471 action Effects 0.000 description 2
- 230000006835 compression Effects 0.000 description 2
- 238000007906 compression Methods 0.000 description 2
- 238000001514 detection method Methods 0.000 description 2
- 239000000463 material Substances 0.000 description 2
- 230000011514 reflex Effects 0.000 description 2
- 239000004065 semiconductor Substances 0.000 description 2
- 230000008901 benefit Effects 0.000 description 1
- 230000008859 change Effects 0.000 description 1
- 230000000295 complement effect Effects 0.000 description 1
- 238000012937 correction Methods 0.000 description 1
- 230000006837 decompression Effects 0.000 description 1
- 238000013461 design Methods 0.000 description 1
- 230000006866 deterioration Effects 0.000 description 1
- 238000002955 isolation Methods 0.000 description 1
- 239000004973 liquid crystal related substance Substances 0.000 description 1
- 238000004519 manufacturing process Methods 0.000 description 1
- 229910044991 metal oxide Inorganic materials 0.000 description 1
- 150000004706 metal oxides Chemical class 0.000 description 1
- 239000000203 mixture Substances 0.000 description 1
- 238000012986 modification Methods 0.000 description 1
- 230000004048 modification Effects 0.000 description 1
- 238000005457 optimization Methods 0.000 description 1
- 230000004044 response Effects 0.000 description 1
- 239000005394 sealing glass Substances 0.000 description 1
Images


















Classifications
-
- G—PHYSICS
- G02—OPTICS
- G02B—OPTICAL ELEMENTS, SYSTEMS OR APPARATUS
- G02B17/00—Systems with reflecting surfaces, with or without refracting elements
- G02B17/08—Catadioptric systems
- G02B17/0804—Catadioptric systems using two curved mirrors
-
- G—PHYSICS
- G02—OPTICS
- G02B—OPTICAL ELEMENTS, SYSTEMS OR APPARATUS
- G02B17/00—Systems with reflecting surfaces, with or without refracting elements
- G02B17/08—Catadioptric systems
- G02B17/0804—Catadioptric systems using two curved mirrors
- G02B17/0808—Catadioptric systems using two curved mirrors on-axis systems with at least one of the mirrors having a central aperture
-
- G—PHYSICS
- G02—OPTICS
- G02B—OPTICAL ELEMENTS, SYSTEMS OR APPARATUS
- G02B17/00—Systems with reflecting surfaces, with or without refracting elements
- G02B17/08—Catadioptric systems
Landscapes
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Optics & Photonics (AREA)
- Lenses (AREA)
- Adjustment Of Camera Lenses (AREA)
Description
1.レンズの基本構成
2.作用・効果
3.撮像装置への適用例
4.レンズの数値実施例
5.その他の実施の形態
図1は、本開示の一実施の形態に係る反射屈折型レンズ系の第1の構成例を示している。この構成例は、後述の数値実施例1のレンズ構成に対応している。同様にして、後述の数値実施例2ないし4のレンズ構成に対応する第2ないし第4の構成例を、図2ないし図4に示す。これらの図1等において、符号Simgは像面、Z1は光軸を示す。
以下、本実施の形態に係る反射屈折型レンズ系の構成を、適宜図1等に示した構成例に対応付けて説明するが、本開示による技術は、図示した構成例に限定されるものではない。
次に、本実施の形態に係る反射屈折型レンズ系の作用および効果を説明する。
本実施の形態に係る反射屈折型レンズ系は、以下の条件式を少なくとも1つ、好ましくは2つ以上の条件式を組み合わせて満足するように各レンズ群の構成の最適化を図ることで、より良好な性能を得ることができる。
ただし、
f2:第2レンズ群GR2の焦点距離
f:無限遠合焦状態における全系の焦点距離
とする。
なお、より高い光学性能を得るために、条件式(1)の数値範囲は以下の条件式(1)’の通り、設定することが好ましい。
0.05<f2/f<0.3 ……(1)’
ただし、
f3:第3レンズ群GR3の焦点距離
とする。
なお、より高い光学性能を得るために、条件式(2)の数値範囲は以下の条件式(2)’の通り、設定することが好ましい。
−1.5<f3/f<0 ……(2)’
ただし、
r1:凹面鏡L12Aが形成されたレンズの物体側の曲率半径
r2:凹面鏡L12Aが形成されたレンズの像側の曲率半径
とする。
なお、より高い光学性能を得るために、条件式(3)の数値範囲は以下の条件式(3)’の通り、設定することが好ましい。
4.0<(r2+r1)/(r2−r1)<9.5 ……(3)’
ただし、
r3:凸面鏡L13が形成されたレンズの物体側の曲率半径
r4:凸面鏡L13が形成されたレンズの像側の曲率半径
とする。
なお、より高い光学性能を得るために、条件式(4)の数値範囲は以下の条件式(4)’の通り、設定することが好ましい。
2.0<(r3+r4)/(r3−r4)<7.0 ……(4)’
図19は、本実施の形態に係る反射屈折型レンズ系を適用した撮像装置100の一構成例を示している。この撮像装置100は、例えばデジタルスチルカメラであり、カメラブロック10と、カメラ信号処理部20と、画像処理部30と、LCD(Liquid Crystal Display)40と、R/W(リーダ/ライタ)50と、CPU(Central Processing Unit)60と、入力部70と、レンズ駆動制御部80とを備えている。
撮影の待機状態では、CPU60による制御の下で、カメラブロック10において撮影された画像信号が、カメラ信号処理部20を介してLCD40に出力され、カメラスルー画像として表示される。また、例えば入力部70からのフォーカシングのための指示入力信号が入力されると、CPU60がレンズ駆動制御部80に制御信号を出力し、レンズ駆動制御部80の制御に基づいてレンズ系11の所定のレンズが移動する。
次に、本実施の形態に係る反射屈折型レンズ系の具体的な数値実施例について説明する。
なお、以下の各表や説明において示した記号の意味等については、下記に示す通りである。「面No」は、光が入射する方向から順次増加するようにして符号を付したi番目の面の番号を示している。「Ri」は、i番目の面の近軸の曲率半径の値(mm)を示す。「Di」はi番目の面とi+1番目の面との間の光軸上の間隔の値(mm)を示す。「Ni」はi番目の面を有する光学要素の材質のd線(波長587.6nm)における屈折率の値を示す。「νi」はi番目の面を有する光学要素の材質のd線におけるアッベ数の値を示す。「Ri」の値が「Infinity」となっている部分は平面、または絞り面(開口絞りSt)を示す。「面No」において「STO」と記した面は開口絞りStであることを示す。
x=cY2/[1+{1−(1+K)c2Y2}1/2]+ΣAi・Yi
以下の各数値実施例に係る反射屈折型レンズ系はいずれも、上記したレンズの基本構成および、望ましい条件を満足した構成となっている。各数値実施例に係る反射屈折型レンズ系はいずれも、光が入射する方向から順に、凹面鏡L12Aと凸面鏡L13とを含み正の屈折力を有する第1レンズ群GR1と、正の屈折力を有する第2レンズ群GR2と、負の屈折力を有する第3レンズ群GR3とを備えている。
[表1]〜[表3]は、図1に示した第1の構成例に係る反射屈折型レンズ系1に対応する具体的な数値実施例を示している。特に[表1]にはその基本的なレンズデータを示し、[表2]には非球面に関するデータを示す。[表3]にはその他のデータを示す。

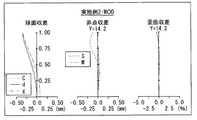
[表4]〜[表6]は、図2に示した第2の構成例に係る反射屈折型レンズ系2に対応する具体的な数値実施例を示している。特に[表4]にはその基本的なレンズデータを示し、[表5]には非球面に関するデータを示す。[表6]にはその他のデータを示す。
[表7]〜[表9]は、図3に示した第3の構成例に係る反射屈折型レンズ系3に対応する具体的な数値実施例を示している。特に[表7]にはその基本的なレンズデータを示し、[表8]には非球面に関するデータを示す。[表9]にはその他のデータを示す。
[表10]〜[表12]は、図4に示した第4の構成例に係る反射屈折型レンズ系4に対応する具体的な数値実施例を示している。特に[表10]にはその基本的なレンズデータを示し、[表11]には非球面に関するデータを示す。[表12]にはその他のデータを示す。
[表13]には、上述の各条件式に関する値を、各数値実施例についてまとめたものを示す。[表13]から分かるように、各条件式について、各数値実施例の値がその数値範囲内となっている。
本開示による技術は、上記実施の形態および実施例の説明に限定されず種々の変形実施が可能である。
例えば、上記各数値実施例において示した各部の形状および数値は、いずれも本技術を実施するための具体化のほんの一例に過ぎず、これらによって本技術の技術的範囲が限定的に解釈されることがあってはならないものである。
[1]
光が入射する方向から順に、
凹面鏡と凸面鏡とを含み正の屈折力を有する第1レンズ群と、
正の屈折力を有する第2レンズ群と、
負の屈折力を有する第3レンズ群と
を備えた反射屈折型レンズ系。
[2]
前記第2レンズ群は、前記凹面鏡よりも像側に配置されている
上記[1]に記載の反射屈折型レンズ系。
[3]
前記第2レンズ群を光軸に平行な方向に移動させることにより、近距離物体に対する合焦を行う
上記[1]または[2]に記載の反射屈折型レンズ系。
[4]
前記第3レンズ群は最も物体側に凹レンズを有し、前記凹レンズを光軸に垂直な方向に移動させることにより防振を行う
上記[1]ないし[3]のいずれか1つに記載の反射屈折型レンズ系。
[5]
以下の条件式を満足する
上記[1]ないし[4]のいずれか1つに記載の反射屈折型レンズ系。
0<f2/f<0.4 ……(1)
ただし、
f2:前記第2レンズ群の焦点距離
f:無限遠合焦状態における全系の焦点距離
とする。
[6]
以下の条件式を満足する
上記[1]ないし[5]のいずれか1つに記載の反射屈折型レンズ系。
−2.0<f3/f<0 ……(2)
ただし、
f3:前記第3レンズ群の焦点距離
とする。
[7]
以下の条件式を満足する
上記[1]ないし[6]のいずれか1つに記載の反射屈折型レンズ系。
2.0<(r2+r1)/(r2−r1)<10 ……(3)
ただし、
r1:前記凹面鏡が形成されたレンズの物体側の曲率半径
r2:前記凹面鏡が形成されたレンズの像側の曲率半径
とする。
[8]
以下の条件式を満足する
上記[1]ないし[7]のいずれか1つに記載の反射屈折型レンズ系。
0<(r3+r4)/(r3−r4)<8.0 ……(4)
ただし、
r3:前記凸面鏡が形成されたレンズの物体側の曲率半径
r4:前記凸面鏡が形成されたレンズの像側の曲率半径
とする。
[9]
実質的に屈折力を有さないレンズをさらに備えた
上記[1]ないし[8]のいずれか1つに記載の反射屈折型レンズ系。
[10]
反射屈折型レンズ系と、前記反射屈折型レンズ系によって形成された光学像に応じた撮像信号を出力する撮像素子とを含み、
前記反射屈折型レンズ系は、
光が入射する方向から順に、
凹面鏡と凸面鏡とを含み正の屈折力を有する第1レンズ群と、
正の屈折力を有する第2レンズ群と、
負の屈折力を有する第3レンズ群と
を備えた撮像装置。
[11]
前記反射屈折型レンズ系は、実質的に屈折力を有さないレンズをさらに備える
上記[10]に記載の撮像装置。
Claims (10)
- 光が入射する方向から順に、
正の屈折力を有する第1レンズ群と、
正の屈折力を有する第2レンズ群と、
負の屈折力を有する第3レンズ群と
からなり、
前記第2レンズ群を光軸に平行な方向に移動させることにより、近距離物体に対する合焦を行うようになされ、
前記第1レンズ群は、
物体側より順に、凸レンズと、凸面鏡と、物体側に凹面を向けたメニスカス形状のレンズと、凹レンズとからなり、
前記凸面鏡は、像側に凸面を向けたメニスカス形状のレンズの物体側の面を反射面とすることにより形成され、
前記物体側に凹面を向けたメニスカス形状のレンズは、周辺部の像側の面を反射面とすることにより形成された凹面鏡と、中央部に形成された透過屈折型のレンズ部とを含み、
前記第1レンズ群に入射した光線が、前記凸レンズ、前記凹面鏡、前記凸面鏡、前記透過屈折型のレンズ部、前記凹レンズの順に進行するように構成されている
反射屈折型レンズ系。 - 前記第2レンズ群は、前記凹面鏡よりも像側に配置されている
請求項1に記載の反射屈折型レンズ系。 - 前記第3レンズ群は最も物体側に凹レンズを有し、前記凹レンズを光軸に垂直な方向に移動させることにより防振を行う
請求項1または2に記載の反射屈折型レンズ系。 - 以下の条件式を満足する
請求項1ないし3のいずれか1つに記載の反射屈折型レンズ系。
0<f2/f<0.4 ……(1)
ただし、
f2:前記第2レンズ群の焦点距離
f:無限遠合焦状態における全系の焦点距離
とする。 - 以下の条件式を満足する
請求項1ないし4のいずれか1つに記載の反射屈折型レンズ系。
−2.0<f3/f<0 ……(2)
ただし、
f3:前記第3レンズ群の焦点距離
とする。 - 以下の条件式を満足する
請求項1ないし5のいずれか1つに記載の反射屈折型レンズ系。
2.0<(r2+r1)/(r2−r1)<10 ……(3)
ただし、
r1:前記凹面鏡が形成されたレンズの物体側の曲率半径
r2:前記凹面鏡が形成されたレンズの像側の曲率半径
とする。 - 以下の条件式を満足する
請求項1ないし6のいずれか1つに記載の反射屈折型レンズ系。
0<(r3+r4)/(r3−r4)<8.0 ……(4)
ただし、
r3:前記凸面鏡が形成されたレンズの物体側の曲率半径
r4:前記凸面鏡が形成されたレンズの像側の曲率半径
とする。 - 実質的に屈折力を有さないレンズをさらに備えた
請求項1ないし7のいずれか1つに記載の反射屈折型レンズ系。 - 反射屈折型レンズ系と、前記反射屈折型レンズ系によって形成された光学像に応じた撮像信号を出力する撮像素子とを含み、
前記反射屈折型レンズ系は、
光が入射する方向から順に、
正の屈折力を有する第1レンズ群と、
正の屈折力を有する第2レンズ群と、
負の屈折力を有する第3レンズ群と
からなり、
前記第2レンズ群を光軸に平行な方向に移動させることにより、近距離物体に対する合焦を行うようになされ、
前記第1レンズ群は、
物体側より順に、凸レンズと、凸面鏡と、物体側に凹面を向けたメニスカス形状のレンズと、凹レンズとからなり、
前記凸面鏡は、像側に凸面を向けたメニスカス形状のレンズの物体側の面を反射面とすることにより形成され、
前記物体側に凹面を向けたメニスカス形状のレンズは、周辺部の像側の面を反射面とすることにより形成された凹面鏡と、中央部に形成された透過屈折型のレンズ部とを含み、
前記第1レンズ群に入射した光線が、前記凸レンズ、前記凹面鏡、前記凸面鏡、前記透過屈折型のレンズ部、前記凹レンズの順に進行するように構成されている
撮像装置。 - 前記反射屈折型レンズ系は、実質的に屈折力を有さないレンズをさらに備える
請求項9に記載の撮像装置。
Priority Applications (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2012221778A JP5915489B2 (ja) | 2012-10-04 | 2012-10-04 | 反射屈折型レンズ系および撮像装置 |
| US14/030,043 US9568718B2 (en) | 2012-10-04 | 2013-09-18 | Catadioptric lens system and image pickup unit |
| CN201310460483.9A CN103713378A (zh) | 2012-10-04 | 2013-09-30 | 折反射透镜系统以及图像拾取单元 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2012221778A JP5915489B2 (ja) | 2012-10-04 | 2012-10-04 | 反射屈折型レンズ系および撮像装置 |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2014074783A JP2014074783A (ja) | 2014-04-24 |
| JP2014074783A5 JP2014074783A5 (ja) | 2015-03-05 |
| JP5915489B2 true JP5915489B2 (ja) | 2016-05-11 |
Family
ID=50406484
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2012221778A Expired - Fee Related JP5915489B2 (ja) | 2012-10-04 | 2012-10-04 | 反射屈折型レンズ系および撮像装置 |
Country Status (3)
| Country | Link |
|---|---|
| US (1) | US9568718B2 (ja) |
| JP (1) | JP5915489B2 (ja) |
| CN (1) | CN103713378A (ja) |
Families Citing this family (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR102106540B1 (ko) * | 2013-12-12 | 2020-05-04 | 삼성전자주식회사 | 반사굴절식 라이트 필드 렌즈 및 이를 포함하는 촬상 장치 |
| CN105511060B (zh) * | 2015-12-22 | 2018-06-22 | 中国科学院长春光学精密机械与物理研究所 | 全球面环形大视场月球边缘光学成像物镜 |
| JP6667297B2 (ja) | 2016-01-08 | 2020-03-18 | キヤノン株式会社 | 光学系及びそれを有する撮像装置 |
| CN110460756B (zh) * | 2019-08-12 | 2021-06-08 | 杭州电子科技大学 | 一种场景实时自动去雨成像处理方法及装置 |
| TWI710793B (zh) | 2019-08-23 | 2020-11-21 | 大立光電股份有限公司 | 光學攝影系統及電子裝置 |
| JP7401265B2 (ja) | 2019-11-07 | 2023-12-19 | キヤノン株式会社 | 光学系および光学機器 |
| WO2021194012A1 (ko) * | 2020-03-25 | 2021-09-30 | 엘지전자 주식회사 | 촬상 렌즈, 이를 포함하는 카메라 모듈 및 전자기기 |
Family Cites Families (10)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH0233208Y2 (ja) * | 1981-03-20 | 1990-09-07 | ||
| JPS58205124A (ja) | 1982-05-26 | 1983-11-30 | Nippon Kogaku Kk <Nikon> | 反射屈折型望遠レンズ |
| US4971428A (en) * | 1989-03-27 | 1990-11-20 | Lenzar Optics Corporation | Catadioptric zoom lens |
| JPH0553058A (ja) * | 1991-02-25 | 1993-03-05 | Nikon Corp | 防振機能を有するレフレツクスレンズ系 |
| US5331467A (en) * | 1991-02-25 | 1994-07-19 | Nikon Corporation | Reflex lens system having the antivibration function |
| US7136234B2 (en) * | 2000-09-12 | 2006-11-14 | Kla-Tencor Technologies Corporation | Broad band DUV, VUV long-working distance catadioptric imaging system |
| WO2012108137A1 (ja) * | 2011-02-09 | 2012-08-16 | コニカミノルタオプト株式会社 | 反射屈折光学系 |
| JP5656682B2 (ja) * | 2011-02-22 | 2015-01-21 | キヤノン株式会社 | 反射屈折光学系及びそれを有する撮像装置 |
| JP5659961B2 (ja) * | 2011-06-13 | 2015-01-28 | コニカミノルタ株式会社 | 大口径変倍光学系および撮像装置 |
| JP2013015713A (ja) * | 2011-07-05 | 2013-01-24 | Sony Corp | 反射屈折型レンズ系および撮像装置 |
-
2012
- 2012-10-04 JP JP2012221778A patent/JP5915489B2/ja not_active Expired - Fee Related
-
2013
- 2013-09-18 US US14/030,043 patent/US9568718B2/en not_active Expired - Fee Related
- 2013-09-30 CN CN201310460483.9A patent/CN103713378A/zh active Pending
Also Published As
| Publication number | Publication date |
|---|---|
| US9568718B2 (en) | 2017-02-14 |
| US20140098277A1 (en) | 2014-04-10 |
| JP2014074783A (ja) | 2014-04-24 |
| CN103713378A (zh) | 2014-04-09 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6136588B2 (ja) | ズームレンズ及び撮像装置 | |
| JP5040408B2 (ja) | ズームレンズ及び撮像装置 | |
| JP4771182B2 (ja) | ズームレンズ及び撮像装置 | |
| JP5880365B2 (ja) | 撮像レンズ及び撮像装置 | |
| JP6597626B2 (ja) | 広角レンズおよび撮像装置 | |
| JP5870786B2 (ja) | ズームレンズおよび撮像装置 | |
| JP2015068910A (ja) | 撮像レンズおよび撮像装置 | |
| JP5915437B2 (ja) | 可変焦点距離レンズ系および撮像装置 | |
| US9316822B2 (en) | Zoom lens and imaging apparatus | |
| JP2011107450A (ja) | 撮像レンズ及び撮像装置 | |
| JP2015064492A (ja) | ズームレンズ及び撮像装置 | |
| JP2011237588A (ja) | ズームレンズ及び撮像装置 | |
| JP2010061007A (ja) | ズームレンズ及び撮像装置 | |
| JP4697555B2 (ja) | ズームレンズ及び撮像装置 | |
| JP5915489B2 (ja) | 反射屈折型レンズ系および撮像装置 | |
| JPWO2018088038A1 (ja) | 撮像レンズおよび撮像装置 | |
| JP2013182054A (ja) | ズームレンズ及び撮像装置 | |
| JP2014211468A (ja) | ズームレンズおよび撮像装置 | |
| JPWO2018139160A1 (ja) | ズームレンズおよび撮像装置 | |
| JP2012173298A (ja) | ズームレンズおよび撮像装置 | |
| JP2009217167A (ja) | ズーム光学系及び撮像装置 | |
| JP2015166834A (ja) | ズームレンズおよび撮像装置 | |
| JP5141375B2 (ja) | ズームレンズ及び撮像装置 | |
| JP2013238740A (ja) | 撮像レンズおよび撮像装置 | |
| JP2014066945A (ja) | ズームレンズおよび撮像装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20150116 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20150116 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20151002 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20151013 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20151119 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20160105 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20160218 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20160308 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20160321 |
|
| R151 | Written notification of patent or utility model registration |
Ref document number: 5915489 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R151 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| LAPS | Cancellation because of no payment of annual fees |