JP5879080B2 - 自動調芯プーリーローラを備えるベルト搬送装置 - Google Patents
自動調芯プーリーローラを備えるベルト搬送装置 Download PDFInfo
- Publication number
- JP5879080B2 JP5879080B2 JP2011205867A JP2011205867A JP5879080B2 JP 5879080 B2 JP5879080 B2 JP 5879080B2 JP 2011205867 A JP2011205867 A JP 2011205867A JP 2011205867 A JP2011205867 A JP 2011205867A JP 5879080 B2 JP5879080 B2 JP 5879080B2
- Authority
- JP
- Japan
- Prior art keywords
- belt
- pulley roller
- base
- pulley
- roller
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images










Landscapes
- Structure Of Belt Conveyors (AREA)
Description
特に、搬送の位置精度が要求されるベルトコンベアにあっては、ベルト走行時の蛇行防止が重要であって、ベルトの裏面にV字断面のガイド帯を貼着して、V字断面の溝を有するプーリーローラにより蛇行防止を行うようにしている。
そこで、本発明は、プーリーローラの両端を回転自在に支持するアームと、これらのアームを両端に固着した揺動アームとからなる支持装置を使用して、ドラムの中心点を不動のものとしてドラムを揺動可能に支持することにより、ドラム径の小さいプーリーローラを使用して幅の広いベルトでも高い剛性を確保しつつ、優れたベルトの自動調芯を実現するとともに、小さな搬送物品についても、確実な乗り移りを実現することを目的としている。
図1、図2は、本実施例のベルトコンベアの全体構成を示すもので、図1はその平面図、図2は側面図である。
ステンレスや繊維強化型の合成樹脂等で形成されるエンドレスのベルト1は、左右両端のプーリーローラ2、3、ベルトコンベアの基台4の底面両端に取り付けられたガイドローラ5、6及び基台4の底面中央に設けられた駆動プーリーローラ7に掛け渡されており、この駆動プーリーローラ7を、基台4に取り付けられた減速機付きモータ8により駆動することにより、ベルト1は、プーリーローラ2、3、ガイドローラ5、6に案内されて、ベルト1上の物品を搬送する。なお、駆動プーリーローラ7は、図示しないハンドルなどにより、上下に移動できるようになっており、ベルトテンションを調節することができる。
なお、搬送物品は、プーリーローラ2、3間のベルト1上面で搬送されるが、物品がエンドレスベルト1の左右にずれて載置されたり、また、物品をエンドレスベルト1から両サイドに振り分ける際に、ベルト1の上面に作用する物品の荷重が幅方向に大きく変化するので、これがベルト1を蛇行させる大きな要因となるが、基台4の下側ではこうした搬送物品の荷重変化の影響が少ないので、上述したプーリーローラ内部の球面滑りを用いた自動調芯装置により十分に惰行を防止できる。
一方、基盤16に立設されたフランジ17間にも、直角2等分線CL2を中心軸とし、揺動アーム14の中央部に形成された開口とほぼ同一の径を有する支軸18が設けられており、揺動アーム13を両フランジ17間に配置し、支軸18を一方のフランジ17の開口から、揺動アーム14の中央部の両開口を通し、他方のフランジ17の開口に挿通することにより、これを軸受部として、揺動アーム13は、直角2等分線CL2を中心軸として、図4のA−B方向に、アーム12、13が基台4のいずれかの箇所に接触する角度範囲内で揺動できるようになっている。なお、支軸18は、ボールベアリング等の回転軸受を介して、揺動アーム14の中央部に形成された開口に支持され、コの字型のプーリーローラ支持装置15がスムースに揺動できるようになっている。
一方基台4には、基盤16をスライド可能に支持するスライダーブラケットベース19が取り付けられており、基盤16の内周側面161に対向するよう、わずかに径の小さい円弧状の対向周面を備えたブラケットスペーサ20を介して、スライダー圧力座金21が基盤16の内周側上面を覆うように取り付けられている。
なお、基盤16、スライダーブラケットベース19、ブラケットスペーサ20、23、スライダー圧力座金21、24の加工精度を高めれば、スチールボールスペーサ22やニードルスラストベアリングを使用しなくても、潤滑油を介在させるだけで、基盤16の円滑なスライドを実現できる。
一方、基台4の上面には、内周側及び外周側に、中心点Oを中心とする大小の円弧を描くV型レール29、30を備えたレール盤31が固着されており、V型レール29、30のそれぞれに、ホイール25、26及びホイール27、28が、図7に示されるように互いに嵌合し、基盤16の中心点Oを中心とする円弧状のスライドを可能にしている。
実施例1では、ベルト1が蛇行しようとすると、ベルト1の端部がプーリーローラ2、3の両端に設けられたフランジ10に接触することにより当接圧が作用し、この当接圧を解消する方向に基盤16がスライドし、また、揺動アーム14を揺動させる。すわなち、フランジ10との接触により、ベルト1に作用する当接圧が、ベルト1を中心方向に復帰させて調芯を行う復元力として作用し、上述のように効果的な自動調芯を実現できる。
樹脂ベルトの材質、厚さに応じて、使用し得るプーリーローラ径の最小半径が定められており、例えば、ガラス繊維で強化したポリウレタン樹脂の裏面に、ポリウレタン含浸導電帆布を積層した樹脂のベルトの場合、厚さ0.5mmの心体を2層使用した強化型のものでは最小半径50mm、厚さ0.5mmの心体を1層使用した薄型のものでは、最小半径が20mmと定められている。
しかし、より小さな搬送物品のコンベアベルト間の円滑な乗り移りを実現するため、ベルト1として薄型ベルトを使用することにより、プーリーローラ2、3のドラム径を20mm程度まで小さくして、実験を行ったところ、運転をしばらく継続させると、ベルト1の端部がフランジ10に乗り上げてしまい、最終的にはベルト1が脱輪してしまうトラブルが頻繁に発生した。
これは、プーリーローラ2、3のドラム径が20mm程度まで小径化したため、ベルト1とフランジ部10の接触範囲(接触長さ及び接触面積)が非常に小さくなり、さらに、ベルト1の端部の1点が、フランジ部10に接触してから離れるまでの時間が非常に短くなるため、ベルト1の蛇行により、プーリーローラ2、3上で、スラスト方向に移動しようとする力に対し、調芯を行うための十分な復元力を発生させることができないことに起因する。
図9に示されるように、回転軸11は、プーリーローラ2の両端から突出し、ナイロン樹脂製案内ブロック32の内側面32−1に設けられた軸受孔に回転自在に支持されている。したがって、プーリーローラ2の長さは、実施例1のものと比較して、両端のナイロン樹脂製案内ブロック32の軸方向長さ分だけ短くなっている。
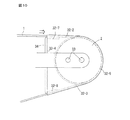
案内ブロック32を軸方向からみたとき、図10にみられるように、角部が円弧状の3角形状をしており、ベルト1の搬送面、すなわち揺動アーム14に対し略平行な面32−2と、基台4の底面に設けられたガイドローラ5、6に向かうベルト1の面に対し略平行な面32−3と、揺動アーム14に略垂直に対向する面32−4と、面32−2と32−3間を接続する円弧状の面32−5を備えている。なお、面32−2と面32−3とを接続する円弧状の面32−5は、プーリーローラ2の軸方向でみたとき、プーリーローラ2と同一の中心点を有しており、その直径もドラム径とほぼ同一に設定されている。
したがって、ベルト1の両端部は、搬送面と平行な面32−2からプーリーローラ2の上端に案内され、このベルト1が、プーリーローラ2の外周に巻き掛けられて屈曲する際、プーリーローラ2の軸方向からみて、面32−2と面32−3とを接続する円弧状の面32−5が、プーリーローラ2の外表面のうち、ベルト1が巻き掛けられて接触する外表面と均一な表面を形成するようになっている。
なお、回転軸11を通る垂直断面でみたとき、段差部32−6の内端面は、各面32−2、32−5、32−3に対し略直角をなしており、その上流端は、垂直方向に半径2mm程度の円弧状に形成され、進行してくるベルト1をスムースに案内できるようになっている。
このようにして、左右一方の案内ブロック32の段差部32−6の内端から他方の案内ブロック32の段差部32−6の内端に至るまで、両端側が案内ブロック32の表面、その間がブリッジシャーシ34の表面よりなる、均一な面が形成されるようになっている。
すなわち、ステンレス製のブリッジシャーシ34の厚さは、凹部32−7、32−8の深さとほぼ等しくなるよう選定されており、両案内ブロック32の面のうち、揺動アーム14に対し略平行な面32−2に形成された凹部32−7に嵌入された部分から、揺動アーム14に略垂直に対向する面32−4を経て、ガイドローラ5、6に向かうベルト1の面に対し略平行な面32−3に形成された凹部32−8の端部に到る。
同様に、ブリッジシャーシ34のうち、凹部32−8に嵌入された部分は、この面33−3の両端側とともに均一の面を形成し、プーリーローラ2の外周により屈曲した後のベルト1を基台4の底面に設けられたガイドローラ5(図2参照)に向けて案内する案内面を形成している。
そして、ベルト1は、端部を案内ブロック32の段差部32−6のうち、面32−2と面32−3とを接続する円弧状の面32−5に形成された段差部により案内されながら、回転するプーリーローラ2により屈曲される。
その後、ベルト1は、再び、端部が段差部32−6により案内されながら、ナイロン樹脂製案内ブロック32の面32−3を摺動し、端部間がステンレス製のブリッジシャーシ34の下方表面を摺動して、ガイドローラ5に向けて案内される。
なお、両端側の案内ブロック32には自己潤滑性があるため、ベルト1の端部を損傷することはなく、また、ブリッジシャーシ34としては、ステンレス等の金属板表面を研磨したものを使用しているので、この部分での摺動によりベルト1の寿命が劣化することもない。
ベルト1が蛇行し、スラスト方向に移動すると、ベルト1の端面が、案内ブロック32の段差部32−6の内側面に乗り上げるようとする。しかし、段差部32−6が面32−2、32−5、32−3に沿って形成されているため、プーリーローラ2との接触部と比較して、ベルト1の端面との接触範囲及び接触時間をはるかに長く確保することができ、調芯を行うのに十分な復元力を長時間にわたって発生させることができる。これにより、ベルト1が、段差部32−6の上方に乗り上げるのを確実に防止することができる。
また、段差部32−6を、回転軸11を通る垂直断面でみたとき、その内側面が底面に対し、上方に向けて拡開するよう傾斜させると、ベルト1が蛇行してスラスト方向に移動する際、復元力を連続的に増加させることができ、調芯作用をより円滑化するとともに、ベルト1の端面の損傷をさらに防止することができる。
前述のように、食品機械に使用する搬送ベルトやコピー機の転写ベルトでは、張力を付加する弾性繊維を含まず、非常に薄いテフロン(登録商標)ベルト等を採用している。
このようなベルトではそもそも面剛性がきわめて小さいため、実施例2の案内ブロック32を使用しても、蛇行して乗り上げ、最終的に脱輪を引き起こす可能性がある。
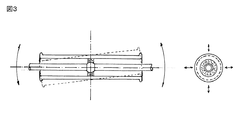
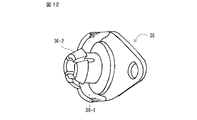
そこで、この実施例では、図11に示すように、プーリーローラ2の回転軸11の両端に圧入スリーブ式の端末キャップ36を嵌着し、この端末キャップ36に、プーリーローラ2のドラム表面との間できわめてベルト両端上部を覆うようなL型のカバーリング36−1を設けた。
また、カバーリング36−1は、図11、及びそのA−A’断面を矢印方向からみた図13に示されるように、回転軸11の上方中心近傍から、ベルト1の進行方向にプーリーローラ2のドラム表面とベルト1の厚み+0.1mm〜0.2mmの一定の間隙を形成し、回転軸11の下方中心近傍に到るまで形成されている。これにより、プーリーローラ2の略半周にわたり、ドラム表面との間で、カバーリング36−1の下面がベルト1の両端部を覆うようになっている。ベルト1の両端部を覆う範囲は、プーリーローラ2の周方向に可能な限り広範囲とすることが好ましいが、ベルト1の材質や厚みに応じて、半周に到らないものでも有効である。
なお、この実施例では、ベルト1の両端部を覆う範囲がほぼ半周にわたっているため、ベルト1はほぼ水平にプーリーローラ2の下方中心近傍から送られることになるが、その直上流に案内プーリーを設け、基台4の下方に設けられたガイドローラ5、6に向けて案内するようにすればよい。
なお、端末キャップ36は、案内ブロック32と同様、ナイロン等の自己潤滑性の高い樹脂で一体成型するのが好ましいが、他の樹脂や金属素材の表面を、テフロン(登録商標)でコーティングしたものでもよい。これは、案内ブロック32についても同様である。
また、上記実施例では、プーリーローラを水平面内及び垂直面内での揺動を可能にしているが、コンベアベルトの形式や配置に応じて、揺動面を適宜傾斜させることも可能である。
2、3 プーリーローラ
4 基台
5、6 ガイドローラ
7 駆動プーリーローラ
10 フランジ
11 プーリーローラの回転軸
12、13 左右アーム
14 揺動アーム
15 コの字状プーリーローラ支持装置
16 基盤
17 フランジ
18 支軸
19 スライダーブラケットベース
20、23 ブラケットスペーサ
21、24 スライダー圧力座金
22 スチールボールスペーサ
25〜28 ホイール
29、30 V型レール
31 レール盤
32 ナイロン樹脂製の案内ブロック
34 ブリッジシャーシ
36 端末キャップ
37 弾性部材
Claims (7)
- 両端のプーリーローラの間に掛け渡されるエンドレスのベルトを備えたベルト搬送装置において、
前記プーリーローラは、両端部に前記ベルトの端面に対向し、前記ベルトが蛇行したときに接触して調芯を行うための復元力を発生する接触部を備えており、かつ、該接触部から突出する回転軸の両端を回転自在に支持する2本のアームと、これらのアームを両端に固着した揺動アームとからなる支持装置により支持されており、
前記揺動アームを、前記プーリーローラ両端部間の中心線(CL1)に対し垂直方向に延びる垂直2等分線(CL2)を中心軸として回転自在に支持する軸受部を備えた基盤と、
該基盤上における前記垂直2等分線上(CL2)の1点を、前記プーリーローラの中心線上にある幅方向中心点(O)を不動の中心とした円弧上を回動させるスライド支持機構とを備えたことを特徴とするベルト搬送装置。 - 前記接触部は、前記プーリーローラの両端部に形成されたフランジ部であることを特徴とする請求項1に記載のベルト搬送装置。
- 前記プーリーローラの両端は案内部材を介して前記2本のアームのそれぞれに回転自在に支持されており、該案内部材は、搬送面に対し略平行でベルトを前記プーリーローラの上端に案内する面と、前記プーリーローラから下方のガイドローラに向けて案内する面を備え、前記接触部が前記案内部材の各面に沿って形成された段差部であることを特徴とする請求項1に記載のベルト搬送装置。
- 前記案内部材が自己潤滑性のある樹脂により形成された案内ブロックからなり、該案内ブロックは、その略中央部から前記プーリーローラを軸支する内側面に至るまで、前記各面に沿って凹部が形成されており、ブリッジシャーシの両端が該凹部に嵌入されて、前記各面に沿って均一な面を形成するようにした請求項3に記載のベルト搬送装置。
- 前記プーリーローラの回転軸両端の中空部に嵌合され、しかも、該回転軸の回転を阻害しないよう結合された端末キャップを設け、該端末キャップに形成されたカバーリングにより、前記プーリーローラの略半周にわたり、前記プーリーローラのドラム表面との間で所定の間隙を介してベルトの両端を覆うことにより前記接触部としたことを特徴とする請求項1に記載のベルト搬送装置。
- 前記基盤の外周側面及び内周側面を、前記プーリーローラの中心線(CL1)上にある幅方向中心点(O)を中心とした大小2つの半径の円弧形状とし、前記スライド支持機構が、基盤の下面に位置して前記コンベアベルトの基台に取り付けられたスライダーブラケットベースと、該スライダーブラケットベースの上面に取り付けられ、かつ、前記基盤の外周側面及び内周側面のそれぞれに対向するよう略同一半径の周面を備えたブラケットスペーサと、該ブラケットスペーサの上面に取り付けられ、前記基盤の外周側及び内周側を覆うスライダー圧力座金とからなることを特徴とする請求項1から5のいずれかに記載のベルト搬送装置。
- 前記スライド支持機構が、前記基盤の下面に、前記プーリーローラの中心線(CL1)上にある幅方向中心点(O)として、半径の異なる円周上にそれぞれ少なくとも1個設けたホイールと、前記コンベアベルトの基台に取り付けられ、各ホイールを案内するレールを備えたレール盤とからなることを特徴とする請求項1から5のいずれかに記載のベルト搬送装置。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2011205867A JP5879080B2 (ja) | 2010-09-30 | 2011-09-21 | 自動調芯プーリーローラを備えるベルト搬送装置 |
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2010220757 | 2010-09-30 | ||
| JP2010220757 | 2010-09-30 | ||
| JP2011205867A JP5879080B2 (ja) | 2010-09-30 | 2011-09-21 | 自動調芯プーリーローラを備えるベルト搬送装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2012091933A JP2012091933A (ja) | 2012-05-17 |
| JP5879080B2 true JP5879080B2 (ja) | 2016-03-08 |
Family
ID=46385764
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2011205867A Active JP5879080B2 (ja) | 2010-09-30 | 2011-09-21 | 自動調芯プーリーローラを備えるベルト搬送装置 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP5879080B2 (ja) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US12202249B2 (en) | 2019-11-18 | 2025-01-21 | Hewlett-Packard Development Company, L.P. | Adjusting a lateral position of a transfer blanket |
Families Citing this family (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP6785147B2 (ja) * | 2016-12-19 | 2020-11-18 | オークラ輸送機株式会社 | 搬送装置 |
| US12378080B2 (en) | 2022-07-22 | 2025-08-05 | Lawrence Equipment, Inc. | Continuous conveyor belt |
| CN116995884B (zh) * | 2023-09-27 | 2023-12-29 | 无锡星微科技有限公司杭州分公司 | 一种直驱高动态性能运动装置及控制方法 |
| CN119609547B (zh) * | 2024-12-04 | 2025-09-16 | 广州市和盛精密机械设备有限公司 | 一种安全性能高的五金管焊接设备 |
Family Cites Families (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH0170707U (ja) * | 1987-10-30 | 1989-05-11 | ||
| JPH03130245U (ja) * | 1990-04-13 | 1991-12-27 | ||
| JP3243984B2 (ja) * | 1994-11-15 | 2002-01-07 | 富士ゼロックス株式会社 | ベルト搬送装置 |
| US5659851A (en) * | 1995-11-17 | 1997-08-19 | Minnesota Mining And Manufacturing Company | Apparatus and method for steering an endless belt |
| US7873311B2 (en) * | 2007-12-05 | 2011-01-18 | Kabushiki Kaisha Toshiba | Belt transfer device for image forming apparatus |
-
2011
- 2011-09-21 JP JP2011205867A patent/JP5879080B2/ja active Active
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US12202249B2 (en) | 2019-11-18 | 2025-01-21 | Hewlett-Packard Development Company, L.P. | Adjusting a lateral position of a transfer blanket |
Also Published As
| Publication number | Publication date |
|---|---|
| JP2012091933A (ja) | 2012-05-17 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5879080B2 (ja) | 自動調芯プーリーローラを備えるベルト搬送装置 | |
| CN102874573B (zh) | 一种在线胶带翻面装置 | |
| JP6900299B2 (ja) | ベルト駆動装置及び画像形成装置 | |
| US11465851B1 (en) | Rollerless idler module and vehicle conveyor system having the same | |
| JP2019082637A (ja) | ベルト駆動装置及び画像形成装置 | |
| KR20190047170A (ko) | 등속과 배속이 공존하는 수평형 컨베이어 시스템 | |
| KR101526192B1 (ko) | 벨트 컨베이어의 벨트 반전 장치 | |
| JP2022180293A (ja) | カーブコンベア、カーブベルト、及びカーブベルトの取り付け方法 | |
| JP6850122B2 (ja) | 搬送方向変換装置 | |
| JP5068565B2 (ja) | コンベヤ自動調芯装置 | |
| KR20160047941A (ko) | 컨베이어 장치 | |
| JP2017173749A (ja) | ベルト搬送装置、定着装置及び画像形成装置 | |
| CN217024289U (zh) | 一种转角传送装置 | |
| CN212531299U (zh) | 用于摆轮分拣设备的分拣模块、摆轮分拣设备 | |
| KR102621582B1 (ko) | 분기 장치 | |
| JP4576987B2 (ja) | 分岐設備 | |
| CN220641313U (zh) | 样本传输装置 | |
| JP5082659B2 (ja) | コンベヤ設備 | |
| CN223174915U (zh) | 一种皮带限位结构 | |
| AU2021101877A4 (en) | A multi-plane dynamic return belt tracker | |
| CN110759033A (zh) | 一种低噪音输送辊筒结构 | |
| JPH079823U (ja) | チェーンコンベヤの駆動装置 | |
| JP2872802B2 (ja) | ベルト駆動装置 | |
| KR200388032Y1 (ko) | 콘베이어벨트의 코너링구조 | |
| JPH04263251A (ja) | 浸漬型処理ラック |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20140902 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20150521 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20150707 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20150827 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20160105 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20160201 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 5879080 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |