JP5773932B2 - 電動モータの回転情報検出方法、電動モータの回転情報検出装置、電動モータ制御装置 - Google Patents
電動モータの回転情報検出方法、電動モータの回転情報検出装置、電動モータ制御装置 Download PDFInfo
- Publication number
- JP5773932B2 JP5773932B2 JP2012081905A JP2012081905A JP5773932B2 JP 5773932 B2 JP5773932 B2 JP 5773932B2 JP 2012081905 A JP2012081905 A JP 2012081905A JP 2012081905 A JP2012081905 A JP 2012081905A JP 5773932 B2 JP5773932 B2 JP 5773932B2
- Authority
- JP
- Japan
- Prior art keywords
- electric motor
- frequency
- ripple
- current
- waveform data
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
- 238000001514 detection method Methods 0.000 title claims description 33
- 238000004458 analytical method Methods 0.000 claims description 26
- 238000000034 method Methods 0.000 claims description 17
- 238000012937 correction Methods 0.000 claims description 14
- 238000001914 filtration Methods 0.000 claims description 9
- 238000000605 extraction Methods 0.000 claims description 2
- 238000012545 processing Methods 0.000 description 12
- 238000001228 spectrum Methods 0.000 description 11
- 230000006870 function Effects 0.000 description 10
- 238000010586 diagram Methods 0.000 description 7
- 238000013461 design Methods 0.000 description 6
- 238000004364 calculation method Methods 0.000 description 5
- 238000005070 sampling Methods 0.000 description 5
- 238000012887 quadratic function Methods 0.000 description 2
- 230000003247 decreasing effect Effects 0.000 description 1
- 238000002474 experimental method Methods 0.000 description 1
- 238000003672 processing method Methods 0.000 description 1
- 230000004044 response Effects 0.000 description 1
Images











Classifications
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02P—CONTROL OR REGULATION OF ELECTRIC MOTORS, ELECTRIC GENERATORS OR DYNAMO-ELECTRIC CONVERTERS; CONTROLLING TRANSFORMERS, REACTORS OR CHOKE COILS
- H02P7/00—Arrangements for regulating or controlling the speed or torque of electric DC motors
- H02P7/0094—Arrangements for regulating or controlling the speed or torque of electric DC motors wherein the position is detected using the ripple of the current caused by the commutator
Landscapes
- Engineering & Computer Science (AREA)
- Power Engineering (AREA)
- Control Of Direct Current Motors (AREA)
Description
リプル周波数+(リプル周波数のC%)=高域側のエッジ周波数
リプル周波数−(リプル周波数のC%)=低域側のエッジ周波数
ωl=2πFl/Fs、ωh=2πFh/Fs
次に、ωc=(ωh−ωl)/2をカットオフ角周波数とするローパスフィルタHl(n)を設計する。
Hl(n)=sin(n×ωc)/πn (n=0、±1、・・・、±M)
次に、窓関数W(n)を乗じる。
Hlw(n)=Hl(n)×W(n)
そして、以下の関係式を用いて、バンドパスフィルタのフィルタ係数Hbp(n)を算出する。
ω0=(ωl+ωh)/2
Hbp(n)=2cos(n×ω0)×Hlw(n)
4 電動モータ
11 傾向補正ブロック
12 FFTブロック
13 リプル周波数推定ブロック
14 バンドパスフィルタ設計ブロック
15 フィルタリング処理ブロック
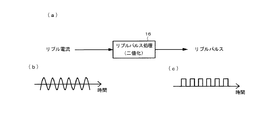
16 リプルパルス処理ブロック
100 電動モータ制御装置
Am リプル周波数候補の最大振幅
B 整流子数
Fb 基本周波数候補
Frb、Frl、Frr リプル周波数候補
K 係数
Claims (7)
- ブラシを備えた電動モータに流れる電流を検出し、該電流に発生するリプルの周波数に基づいて、前記電動モータの回転情報を検出する電動モータの回転情報検出方法において、
前記電動モータに流れる電流の時系列波形データを周波数解析して、得られた周波数単位の波形データの所定の低域にある極大値を有する、モータ電流の基本波の周波数を基本周波数候補とし、
前記電動モータの整流子数と前記電動モータに流れる電流の変化特性とに基づいて予め設定された係数を、前記基本周波数候補に乗じて、リプル周波数候補を算出し、
前記周波数単位の波形データで前記リプル周波数候補の両隣にある極大値を有する周波数をリプル周波数候補として追加し、
前記リプル周波数候補の最大振幅が所定のしきい値以上である場合に、該最大振幅を有する前記リプル周波数候補をリプル周波数とする、ことを特徴とする電動モータの回転情報検出方法。 - 請求項1に記載の電動モータの回転情報検出方法において、
前記電動モータに流れる電流の時系列波形データを周波数解析する前に、
前記電流の時系列波形データの近似関数を算出して、該近似関数に基づいて前記電流の時系列波形データの傾向を補正する、ことを特徴とする電動モータの回転情報検出方法。 - 請求項1または請求項2に記載の電動モータの回転情報検出方法において、
前記リプル周波数に基づいてフィルタ係数を算出し、
前記電動モータに流れる電流の時系列波形データを前記フィルタ係数でフィルタリング処理して、リプル電流の時系列波形データを抽出し、
前記リプル電流の時系列波形データからリプルパルス信号を生成する、ことを特徴とする電動モータの回転情報検出方法。 - ブラシを備えた電動モータに流れる電流を検出する電流検出手段を備え、
前記電動モータに流れる電流に発生するリプルの周波数に基づいて、前記電動モータの回転情報を検出する電動モータの回転情報検出装置において、
前記電流検出手段により検出した電流の時系列波形データを周波数解析する解析手段と、
前記リプル周波数を推定する推定手段と、をさらに備え、
前記推定手段は、
前記解析手段による周波数解析で得られた周波数単位の波形データの所定の低域にある極大値を有する、モータ電流の基本波の周波数を基本周波数候補とし、
前記電動モータの整流子数と前記電動モータに流れる電流の変化特性とに基づいて予め設定された係数を、前記基本周波数候補に乗じて、リプル周波数候補を算出し、
前記周波数単位の波形データで前記リプル周波数候補の両隣にある極大値を有する周波数をリプル周波数候補として追加し、
前記リプル周波数候補の最大振幅が所定のしきい値以上である場合に、該最大振幅を有する前記リプル周波数候補をリプル周波数と推定する、ことを特徴とする電動モータの回転情報検出装置。 - 請求項4に記載の電動モータの回転情報検出装置において、
前記解析手段により前記電動モータに流れる電流の時系列波形データを周波数解析する前に、前記電流の時系列波形データの近似関数を算出して、該近似関数に基づいて前記電流の時系列波形データの傾向を補正する補正手段を備えた、ことを特徴とする電動モータの回転情報検出装置。 - 請求項4または請求項5に記載の電動モータの回転情報検出装置において、
前記推定手段により推定した前記リプル周波数に基づいてフィルタ係数を算出する算出手段と、
前記電動モータに流れる電流の時系列波形データを前記フィルタ係数でフィルタリング処理して、リプル電流の時系列波形データを抽出する抽出手段と、
前記リプル電流の時系列波形データからリプルパルス信号を生成する生成手段と、を備えた、ことを特徴とする電動モータの回転情報検出装置。 - ブラシを備えた電動モータに流れる電流を検出する電流検出手段を備え、
前記電動モータに流れる電流に発生するリプルの周波数に基づいて、前記電動モータの回転情報を検出し、該回転情報に基づいて前記電動モータの駆動を制御する電動モータ制御装置において、
前記電流検出手段により検出した電流の時系列波形データを周波数解析する解析手段と、
前記リプル周波数を推定する推定手段と、をさらに備え、
前記推定手段は、
前記解析手段による周波数解析で得られた周波数単位の波形データの所定の低域にある極大値を有する、モータ電流の基本波の周波数を基本周波数候補とし、
前記電動モータの整流子数と前記電動モータに流れる電流の変化特性とに基づいて予め設定された係数を、前記基本周波数候補に乗じて、リプル周波数候補を算出し、
前記周波数単位の波形データで前記リプル周波数候補の両隣にある極大値を有する周波数をリプル周波数候補として追加し、
前記リプル周波数候補の最大振幅が所定のしきい値以上である場合に、前記最大振幅を有する前記リプル周波数候補をリプル周波数と推定する、ことを特徴とする電動モータ制御装置。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2012081905A JP5773932B2 (ja) | 2012-03-30 | 2012-03-30 | 電動モータの回転情報検出方法、電動モータの回転情報検出装置、電動モータ制御装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2012081905A JP5773932B2 (ja) | 2012-03-30 | 2012-03-30 | 電動モータの回転情報検出方法、電動モータの回転情報検出装置、電動モータ制御装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2013212028A JP2013212028A (ja) | 2013-10-10 |
| JP5773932B2 true JP5773932B2 (ja) | 2015-09-02 |
Family
ID=49529390
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2012081905A Expired - Fee Related JP5773932B2 (ja) | 2012-03-30 | 2012-03-30 | 電動モータの回転情報検出方法、電動モータの回転情報検出装置、電動モータ制御装置 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP5773932B2 (ja) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN110295819A (zh) * | 2018-03-22 | 2019-10-01 | 三菱自动车工业株式会社 | 移动部件的移动量控制装置 |
Families Citing this family (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP6663280B2 (ja) * | 2016-04-06 | 2020-03-11 | 株式会社ミツバ | モータ装置 |
| CN113169652B (zh) | 2018-12-17 | 2024-10-18 | 株式会社电装 | 直流电动机 |
| JP2020102988A (ja) * | 2018-12-25 | 2020-07-02 | 株式会社デンソー | モータ制御装置 |
| GB2580962A (en) * | 2019-02-01 | 2020-08-05 | Digipulse Ltd | Motor waveform filtering to determine commutation timing |
| CN109991479B (zh) * | 2019-03-22 | 2020-12-11 | 中国科学院新疆天文台 | 多波束接收机的快速射电暴实时探测装置、系统与方法 |
| CN116298369A (zh) * | 2023-04-04 | 2023-06-23 | 安徽工业大学 | 一种基于非接触式磁旋转位置传感器的电机转速测量装置及方法 |
Family Cites Families (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH084389B2 (ja) * | 1987-09-03 | 1996-01-17 | 日置電機株式会社 | 直流モータの回転数測定装置 |
| JP2007236170A (ja) * | 2006-03-03 | 2007-09-13 | Asmo Co Ltd | 回転電機の回転数測定方法及び回転電機の回転数測定装置 |
| JP4763509B2 (ja) * | 2006-05-23 | 2011-08-31 | アイシン精機株式会社 | リプル検出装置 |
-
2012
- 2012-03-30 JP JP2012081905A patent/JP5773932B2/ja not_active Expired - Fee Related
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN110295819A (zh) * | 2018-03-22 | 2019-10-01 | 三菱自动车工业株式会社 | 移动部件的移动量控制装置 |
| CN110295819B (zh) * | 2018-03-22 | 2020-11-13 | 三菱自动车工业株式会社 | 移动部件的移动量控制装置 |
Also Published As
| Publication number | Publication date |
|---|---|
| JP2013212028A (ja) | 2013-10-10 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5773932B2 (ja) | 電動モータの回転情報検出方法、電動モータの回転情報検出装置、電動モータ制御装置 | |
| US9777748B2 (en) | System and method of detecting cavitation in pumps | |
| US8169178B2 (en) | Detection of the angular position of the rotor of a brush motor without using sensors | |
| CN106680716B (zh) | 一种基于无位置传感器的永磁电机轴承故障诊断的方法 | |
| US9270216B2 (en) | Method and device for processing a motor signal | |
| CN113866480A (zh) | 用于马达控制系统的相电流测量中的偏移误差的检测 | |
| JP2012058221A (ja) | 電気機器の巻線診断システム | |
| CN114966204A (zh) | 用于检测旋转变压器的相位延迟的装置和方法 | |
| EP3534528A1 (en) | Motor control device and current ripple detection method for dc motor | |
| US20040098213A1 (en) | Method for determining the frequency of the current ripple in the armature current of a commutated DC motor | |
| US6839653B2 (en) | Method for correcting the determination of the rotational position of a commutated DC motor drive shaft | |
| US10775209B2 (en) | Control circuit and method for checking the plausibility of a rotor position angle | |
| JPH03291539A (ja) | 電動機のころがり軸受の異常検出方法 | |
| EP2556381B1 (en) | Speed and rotor position estimation of electrical machines using rotor slot harmonics or higher order rotor slot harmonics | |
| Ralev et al. | Accurate rotor position detection for low-speed operation of switched reluctance drives | |
| CN109085501B (zh) | 一种直流有刷电机转矩转角和转速的检测方法 | |
| Namdar et al. | Detection of Stator Interturn Fault in Induction Motors Using SNR Concept | |
| US11482952B1 (en) | Method for determining zero crossing occurrence in alternating current signal with constant frequency of permanent magnet synchronous motor with high noise immunity and low delay and associated motor device | |
| Petushkov | Analysis of defects in the rotor asynchronous motor during start | |
| Dasari et al. | Phase locked loop based signal processing approach for the health monitoring of power systems through their RF emissions | |
| JP6312034B2 (ja) | モータ駆動装置および制御方法 | |
| Papathanasopoulos et al. | Vibration Monitoring for Position Sensor Fault Diagnosis in Brushless DC Motor Drives. Energies 2021, 14, 2248 | |
| Puche-Panadero et al. | Micro Zero Padding for the Reduction of Spectral Leakage in the Diagnosis of Rotor Asymmetries Faults in Large Induction | |
| CN116865625A (zh) | 一种纹波电机位置信息处理方法及系统 | |
| EP4212968A1 (en) | Motor control device |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20140213 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20141112 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20141118 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20150113 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20150630 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20150630 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 5773932 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| LAPS | Cancellation because of no payment of annual fees |