JP5709532B2 - 自動合焦装置及びそれを有するレンズ装置及び撮像システム - Google Patents
自動合焦装置及びそれを有するレンズ装置及び撮像システム Download PDFInfo
- Publication number
- JP5709532B2 JP5709532B2 JP2011000647A JP2011000647A JP5709532B2 JP 5709532 B2 JP5709532 B2 JP 5709532B2 JP 2011000647 A JP2011000647 A JP 2011000647A JP 2011000647 A JP2011000647 A JP 2011000647A JP 5709532 B2 JP5709532 B2 JP 5709532B2
- Authority
- JP
- Japan
- Prior art keywords
- data
- focus
- automatic focusing
- detecting
- threshold value
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
Images



















Classifications
-
- G—PHYSICS
- G02—OPTICS
- G02B—OPTICAL ELEMENTS, SYSTEMS OR APPARATUS
- G02B7/00—Mountings, adjusting means, or light-tight connections, for optical elements
- G02B7/28—Systems for automatic generation of focusing signals
- G02B7/285—Systems for automatic generation of focusing signals including two or more different focus detection devices, e.g. both an active and a passive focus detecting device
-
- G—PHYSICS
- G02—OPTICS
- G02B—OPTICAL ELEMENTS, SYSTEMS OR APPARATUS
- G02B27/00—Optical systems or apparatus not provided for by any of the groups G02B1/00 - G02B26/00, G02B30/00
- G02B27/28—Optical systems or apparatus not provided for by any of the groups G02B1/00 - G02B26/00, G02B30/00 for polarising
- G02B27/281—Optical systems or apparatus not provided for by any of the groups G02B1/00 - G02B26/00, G02B30/00 for polarising used for attenuating light intensity, e.g. comprising rotatable polarising elements
-
- G—PHYSICS
- G02—OPTICS
- G02B—OPTICAL ELEMENTS, SYSTEMS OR APPARATUS
- G02B7/00—Mountings, adjusting means, or light-tight connections, for optical elements
- G02B7/02—Mountings, adjusting means, or light-tight connections, for optical elements for lenses
- G02B7/04—Mountings, adjusting means, or light-tight connections, for optical elements for lenses with mechanism for focusing or varying magnification
- G02B7/08—Mountings, adjusting means, or light-tight connections, for optical elements for lenses with mechanism for focusing or varying magnification adapted to co-operate with a remote control mechanism
-
- G—PHYSICS
- G02—OPTICS
- G02B—OPTICAL ELEMENTS, SYSTEMS OR APPARATUS
- G02B7/00—Mountings, adjusting means, or light-tight connections, for optical elements
- G02B7/28—Systems for automatic generation of focusing signals
-
- G—PHYSICS
- G03—PHOTOGRAPHY; CINEMATOGRAPHY; ANALOGOUS TECHNIQUES USING WAVES OTHER THAN OPTICAL WAVES; ELECTROGRAPHY; HOLOGRAPHY
- G03B—APPARATUS OR ARRANGEMENTS FOR TAKING PHOTOGRAPHS OR FOR PROJECTING OR VIEWING THEM; APPARATUS OR ARRANGEMENTS EMPLOYING ANALOGOUS TECHNIQUES USING WAVES OTHER THAN OPTICAL WAVES; ACCESSORIES THEREFOR
- G03B13/00—Viewfinders; Focusing aids for cameras; Means for focusing for cameras; Autofocus systems for cameras
- G03B13/32—Means for focusing
- G03B13/34—Power focusing
- G03B13/36—Autofocus systems
-
- G—PHYSICS
- G03—PHOTOGRAPHY; CINEMATOGRAPHY; ANALOGOUS TECHNIQUES USING WAVES OTHER THAN OPTICAL WAVES; ELECTROGRAPHY; HOLOGRAPHY
- G03B—APPARATUS OR ARRANGEMENTS FOR TAKING PHOTOGRAPHS OR FOR PROJECTING OR VIEWING THEM; APPARATUS OR ARRANGEMENTS EMPLOYING ANALOGOUS TECHNIQUES USING WAVES OTHER THAN OPTICAL WAVES; ACCESSORIES THEREFOR
- G03B3/00—Focusing arrangements of general interest for cameras, projectors or printers
- G03B3/10—Power-operated focusing
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N23/00—Cameras or camera modules comprising electronic image sensors; Control thereof
- H04N23/60—Control of cameras or camera modules
- H04N23/67—Focus control based on electronic image sensor signals
- H04N23/672—Focus control based on electronic image sensor signals based on the phase difference signals
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N23/00—Cameras or camera modules comprising electronic image sensors; Control thereof
- H04N23/60—Control of cameras or camera modules
- H04N23/67—Focus control based on electronic image sensor signals
- H04N23/673—Focus control based on electronic image sensor signals based on contrast or high frequency components of image signals, e.g. hill climbing method
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N25/00—Circuitry of solid-state image sensors [SSIS]; Control thereof
- H04N25/70—SSIS architectures; Circuits associated therewith
- H04N25/702—SSIS architectures characterised by non-identical, non-equidistant or non-planar pixel layout
Description
L=f×B/P・・・・・・・・・・・・・・・・・・(1)
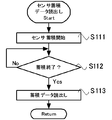
図18のステップS130からS190までは実施例1の図3と同様の処理を行うため、説明を省略する。
111 フォーカスレンズ
112 モータ
113 ドライバ
114 位置検出器
121 センサ結像レンズ
122 センサ
130 CPU
131 センサ制御部
132 コントラスト検出部
133 位相差検出部
134 映像焦点検出部
135 制御部
136 レンズ制御部
201 撮像素子
202 画像処理部
Claims (22)
- 位相差センサから得られた信号を用いて第1のデータを検出する第1のデータ検出手段と、
撮像素子からの信号を用いて第2のデータを検出する第2のデータ検出手段と、
フォーカス機構と、
前記第1のデータと、前記第2のデータと、に基づいて前記フォーカス機構を制御するフォーカス制御手段と、
前記フォーカス制御手段を用いて合焦状態を得る過程において、前記フォーカス制御手段が前記フォーカス機構を駆動するための駆動速度を設定するフォーカス駆動速度設定手段と、を備えた自動合焦装置であって、
前記第1のデータに基づいて閾値を設定する閾値設定手段を備え、
前記フォーカス駆動速度設定手段は、前記閾値と前記第2のデータとを比較し、前記フォーカス機構の駆動速度を設定する、ことを特徴とする自動合焦装置。 - 前記フォーカス駆動速度設定手段は、前記第2のデータが前記閾値以上である場合は、前記第2のデータが前記閾値未満である場合よりも、前記フォーカス機構の駆動速度を小さく設定する、ことを特徴とする請求項1に記載の自動合焦装置。
- 前記第1のデータは、前記第1のデータ検出手段から得られる信号のコントラストであることを特徴とする請求項1又は2に記載の自動合焦装置。
- 前記第1のデータは、前記第1のデータ検出手段から得られる信号の蓄積時間であることを特徴とする請求項1又は2に記載の自動合焦装置。
- 前記第1のデータは、前記第1のデータ検出手段から得られる測光センサの輝度情報であることを特徴とする請求項1又は2に記載の自動合焦装置。
- 位相差センサから得られた信号を用いて第1のデータを検出する第1のデータ検出手段と、
撮像素子からの信号を用いて第2のデータを検出する第2のデータ検出手段と、
フォーカス機構と、
前記第1のデータと、前記第2のデータと、に基づいて前記フォーカス機構を制御するフォーカス制御手段と、
前記フォーカス制御手段を用いて合焦状態を得るによる焦点を検出する過程において、前記フォーカス制御手段が前記フォーカス機構を駆動するための駆動速度を設定するフォーカス駆動速度設定手段と、
前記第1のデータに基づき、前記第2のデータに利得を適用し、第3のデータを生成する利得適用手段と、を備えた自動合焦装装置であって、
前記フォーカス駆動速度設定手段は、所定の閾値と前記第3のデータとを比較して、前記フォーカス機構の駆動速度を設定する、ことを特徴とする自動合焦装置。 - 前記フォーカス駆動速度設定手段は、前記第3のデータが前記閾値以上である場合は、前記第3のデータが前記閾値未満である場合よりも、前記フォーカス機構の駆動速度を小さく設定する、ことを特徴とする請求項6に記載の自動合焦装置。
- 前記第1のデータは、前記第1のデータ検出手段から得られる信号のコントラストであることを特徴とする請求項6又は7に記載の自動合焦装置。
- 前記第1のデータは、前記第1のデータ検出手段から得られる信号の蓄積時間であることを特徴とする請求項6又は7に記載の自動合焦装置。
- 前記第1のデータは、前記第1のデータ検出手段から得られる測光センサの輝度情報であることを特徴とする請求項6又は7に記載の自動合焦装置。
- 任意の閾値を入力する閾値入力手段と、入力された閾値を設定する第2の閾値設定手段と、を備え、
前記フォーカス制御手段は、前記第2のデータと前記第2の閾値設定手段による閾値とを比較し、前記フォーカス機構の駆動速度を設定する、ことを特徴とする請求項1乃至10のいずれか1項に記載の自動合焦装置。 - 前記第1のデータは、前記第1のデータ検出手段から得られる信号のコントラストであって、
前記第1のデータ検出手段から得られる信号のコントラストが所定のレンジよりも小さい場合、前記利得適用手段が設定する利得を上げる、ことを特徴とする請求項6又は7に記載の自動合焦装置。 - 前記第1のデータは、前記第1のデータ検出手段から得られる信号の蓄積時間で
あって、
前記第1のデータ検出手段から得られる信号の蓄積時間が所定の時間よりも長い場合、前記利得適用手段が設定する利得を上げる、ことを特徴とする請求項6又は7に記載の自動合焦装置。 - 前記第1のデータは、前記第1のデータ検出手段から得られる測光センサの輝度情報であって、
前記第1のデータ検出手段から得られる測光センサの輝度情報が所定の輝度よりも低い場合、前記利得適用手段が設定する利得を上げる、
ことを特徴とする請求項6又は7に記載の自動合焦装置。 - 任意の閾値を入力する閾値入力手段と、入力された閾値を設定する第2の閾値設定手段と、を備え、
前記フォーカス制御手段は、前記第3のデータと前記第2の閾値設定手段による閾値とを比較し、前記フォーカス機構の駆動速度を設定する、
ことを特徴とする請求項6乃至10、12乃至14のいずれか1項に記載の自動合焦装置。 - 前記第1のデータ検出手段は、撮像光学系から分岐した光束を用いて焦点を検出するTTL位相差方式のデータ検出手段であることを特徴とする請求項1乃至15のいずれか1項に記載の自動合焦装置。
- 前記第1のデータ検出手段は、撮像光学系に入射する光束とは別の光束を用いて焦点を検出する外測位相差方式のデータ検出手段であることを特徴とする請求項1乃至15のいずれか1項に記載の自動合焦装置。
- 位相差センサから得られた信号を用いて第1のデータを検出する第1のデータ検出手段と、
撮像素子からの信号を用いて第2のデータを検出する第2のデータ検出手段と、
フォーカス機構と、
前記第1のデータと、前記第2のデータと、に基づいて前記フォーカス機構を制御するフォーカス制御手段と、
前記フォーカス制御手段を用いて合焦状態を得る過程において、前記第1のデータのコントラストと前記第2のデータとに基づいて、前記フォーカス機構の駆動速度を設定するフォーカス駆動速度設定手段と、を備えることを特徴とする自動合焦装置。 - 位相差センサから得られた信号を用いて第1のデータを検出する第1のデータ検出手段と、
撮像素子からの信号を用いて第2のデータを検出する第2のデータ検出手段と、
フォーカス機構と、
前記第1のデータと、前記第2のデータと、に基づいて前記フォーカス機構を制御するフォーカス制御手段と、
前記フォーカス制御手段を用いて合焦状態を得る過程において、前記第1のデータの蓄積時間と前記第2のデータとに基づいて、前記フォーカス機構の駆動速度を設定するフォーカス駆動速度設定手段と、を備えることを特徴とする自動合焦装置。 - 位相差センサから得られた信号を用いて第1のデータを検出する第1のデータ検出手段と、
撮像素子からの信号を用いて第2のデータを検出する第2のデータ検出手段と、
フォーカス機構と、
前記第1のデータと、前記第2のデータと、に基づいて前記フォーカス機構を制御するフォーカス制御手段と、
前記フォーカス制御手段を用いて合焦状態を得る過程において、前記第1のデータ検出手段から得られる測光センサの輝度情報と前記第2のデータとに基づいて、前記フォーカス機構の駆動速度を設定するフォーカス駆動速度設定手段と、を備えることを特徴とする自動合焦装置。 - 請求項1乃至20のいずれか1項に記載の自動合焦装置を備えるレンズ装置。
- 請求項21に記載のレンズ装置と、前記レンズ装置によって結像される被写体像を撮像する撮像装置を有する撮像システム。
Priority Applications (5)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2011000647A JP5709532B2 (ja) | 2011-01-05 | 2011-01-05 | 自動合焦装置及びそれを有するレンズ装置及び撮像システム |
| US13/336,049 US9568709B2 (en) | 2011-01-05 | 2011-12-23 | Automatic focusing apparatus as well as lens apparatus and image pickup system including the automatic focusing apparatus |
| EP12000049.2A EP2474850B1 (en) | 2011-01-05 | 2012-01-04 | Automatic focusing apparatus as well as lens apparatus and image pickup system including the automatic focusing apparatus |
| KR1020120000892A KR101457758B1 (ko) | 2011-01-05 | 2012-01-04 | 자동 포커싱 장치 및 자동 포커싱 장치를 포함하는 렌즈 장치 및 화상 픽업 시스템 |
| CN201210001555.9A CN102591098B (zh) | 2011-01-05 | 2012-01-05 | 自动聚焦装置以及包括它的透镜装置和图像拾取系统 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2011000647A JP5709532B2 (ja) | 2011-01-05 | 2011-01-05 | 自動合焦装置及びそれを有するレンズ装置及び撮像システム |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2012141501A JP2012141501A (ja) | 2012-07-26 |
| JP5709532B2 true JP5709532B2 (ja) | 2015-04-30 |
Family
ID=45540718
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2011000647A Expired - Fee Related JP5709532B2 (ja) | 2011-01-05 | 2011-01-05 | 自動合焦装置及びそれを有するレンズ装置及び撮像システム |
Country Status (5)
| Country | Link |
|---|---|
| US (1) | US9568709B2 (ja) |
| EP (1) | EP2474850B1 (ja) |
| JP (1) | JP5709532B2 (ja) |
| KR (1) | KR101457758B1 (ja) |
| CN (1) | CN102591098B (ja) |
Families Citing this family (22)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP6000520B2 (ja) * | 2011-07-25 | 2016-09-28 | キヤノン株式会社 | 撮像装置およびその制御方法およびプログラム |
| TWI459113B (zh) * | 2012-03-19 | 2014-11-01 | Altek Corp | 攝像裝置及其鏡頭致動裝置及鏡頭致動方法 |
| JP5950739B2 (ja) * | 2012-07-23 | 2016-07-13 | キヤノン株式会社 | 半導体装置及びカメラ |
| US9338344B2 (en) * | 2013-04-09 | 2016-05-10 | Canon Kabushiki Kaisha | Focusing apparatus and method for controlling the same, and image pickup apparatus |
| JP5871858B2 (ja) * | 2013-05-20 | 2016-03-01 | キヤノン株式会社 | 撮像装置、撮像システム、撮像装置の制御方法、プログラム、および、記憶媒体 |
| KR102162212B1 (ko) * | 2013-05-31 | 2020-10-06 | 엘지이노텍 주식회사 | 카메라모듈 및 오토포커싱 제어방법 |
| JP5914760B2 (ja) * | 2013-06-05 | 2016-05-11 | 富士フイルム株式会社 | レンズ装置 |
| DE112014004092B4 (de) * | 2013-09-05 | 2022-08-11 | Fujifilm Corporation | Bildaufnahmevorrichtung und Fokussiersteuerverfahren |
| JP2015129846A (ja) * | 2014-01-07 | 2015-07-16 | キヤノン株式会社 | 撮像装置およびその制御方法 |
| JP6381266B2 (ja) * | 2014-04-15 | 2018-08-29 | キヤノン株式会社 | 撮像装置、制御装置、制御方法、プログラム、および、記憶媒体 |
| US9769371B1 (en) * | 2014-09-09 | 2017-09-19 | Amazon Technologies, Inc. | Phase detect auto-focus |
| JP2016133595A (ja) * | 2015-01-19 | 2016-07-25 | キヤノン株式会社 | 制御装置、撮像装置、制御方法、プログラム、および、記憶媒体 |
| US9638984B2 (en) * | 2015-03-10 | 2017-05-02 | Qualcomm Incorporated | Search range extension for depth assisted autofocus |
| JP6553948B2 (ja) * | 2015-05-25 | 2019-07-31 | キヤノン株式会社 | 撮像装置、その制御方法、及びプログラム |
| KR102348760B1 (ko) * | 2015-07-24 | 2022-01-07 | 삼성전자주식회사 | 이미지 센서 및 그에 따른 신호 처리 방법 |
| US9910247B2 (en) * | 2016-01-21 | 2018-03-06 | Qualcomm Incorporated | Focus hunting prevention for phase detection auto focus (AF) |
| JP6899630B2 (ja) * | 2016-02-02 | 2021-07-07 | ソニーグループ株式会社 | 交換レンズおよび駆動方法、並びに電子機器 |
| CN105549301B (zh) * | 2016-02-29 | 2018-02-27 | 广东欧珀移动通信有限公司 | 控制方法、控制装置及电子装置 |
| CN106027889B (zh) * | 2016-05-20 | 2019-04-12 | Oppo广东移动通信有限公司 | 控制方法、控制装置及电子装置 |
| CN108668118A (zh) * | 2017-03-31 | 2018-10-16 | 中强光电股份有限公司 | 自动对焦系统、具有自动对焦系统的投影机以及自动对焦方法 |
| JP7146474B2 (ja) * | 2018-06-20 | 2022-10-04 | キヤノン株式会社 | 制御装置、撮像装置、制御方法、プログラム、および、記憶媒体 |
| JP6798072B2 (ja) * | 2019-04-24 | 2020-12-09 | エスゼット ディージェイアイ テクノロジー カンパニー リミテッドSz Dji Technology Co.,Ltd | 制御装置、移動体、制御方法、及びプログラム |
Family Cites Families (18)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2810403B2 (ja) * | 1989-03-28 | 1998-10-15 | キヤノン株式会社 | 自動焦点整合装置 |
| KR960024626A (ko) | 1994-12-08 | 1996-07-20 | 이대원 | 자동 초점용 적외광 동작 표시 장치 및 그 방법 |
| JP3907794B2 (ja) * | 1997-08-21 | 2007-04-18 | ティーオーエー株式会社 | オートフォーカス装置 |
| JP2004070037A (ja) * | 2002-08-07 | 2004-03-04 | Matsushita Electric Ind Co Ltd | 自動焦点調節装置 |
| JP2004109690A (ja) | 2002-09-19 | 2004-04-08 | Canon Inc | カメラシステムおよびカメラ |
| JP4532865B2 (ja) * | 2003-09-09 | 2010-08-25 | キヤノン株式会社 | 撮像装置および撮像装置のフォーカス制御方法 |
| JP5464771B2 (ja) * | 2003-10-15 | 2014-04-09 | キヤノン株式会社 | 撮像装置およびそのフォーカス制御方法 |
| JP2006023653A (ja) | 2004-07-09 | 2006-01-26 | Canon Inc | 光学機器 |
| JP2006171145A (ja) * | 2004-12-14 | 2006-06-29 | Canon Inc | カメラ |
| EP1684503B1 (en) | 2005-01-25 | 2016-01-13 | Canon Kabushiki Kaisha | Camera and autofocus control method therefor |
| JP2007011199A (ja) * | 2005-07-04 | 2007-01-18 | Canon Inc | 撮像装置 |
| US8121470B2 (en) | 2006-07-25 | 2012-02-21 | Canon Kabushiki Kaisha | Focusing device, image pick-up apparatus, and control method |
| JP2008026788A (ja) | 2006-07-25 | 2008-02-07 | Canon Inc | 撮像装置及びフォーカス制御方法 |
| JP2009048123A (ja) | 2007-08-22 | 2009-03-05 | Olympus Imaging Corp | 撮影装置および撮影装置の制御方法 |
| JP2009115893A (ja) | 2007-11-02 | 2009-05-28 | Canon Inc | 撮像装置 |
| JP4558781B2 (ja) | 2007-12-12 | 2010-10-06 | オリンパス株式会社 | カメラの焦点検出装置 |
| US8078047B2 (en) | 2008-02-22 | 2011-12-13 | Panasonic Corporation | Imaging apparatus |
| JP5317562B2 (ja) | 2008-07-17 | 2013-10-16 | キヤノン株式会社 | 位相差検出装置、撮像装置、位相差検出方法、位相差検出プログラム |
-
2011
- 2011-01-05 JP JP2011000647A patent/JP5709532B2/ja not_active Expired - Fee Related
- 2011-12-23 US US13/336,049 patent/US9568709B2/en not_active Expired - Fee Related
-
2012
- 2012-01-04 EP EP12000049.2A patent/EP2474850B1/en not_active Not-in-force
- 2012-01-04 KR KR1020120000892A patent/KR101457758B1/ko active IP Right Grant
- 2012-01-05 CN CN201210001555.9A patent/CN102591098B/zh not_active Expired - Fee Related
Also Published As
| Publication number | Publication date |
|---|---|
| US20120169917A1 (en) | 2012-07-05 |
| KR20120079813A (ko) | 2012-07-13 |
| EP2474850A1 (en) | 2012-07-11 |
| KR101457758B1 (ko) | 2014-11-03 |
| JP2012141501A (ja) | 2012-07-26 |
| CN102591098B (zh) | 2015-12-09 |
| CN102591098A (zh) | 2012-07-18 |
| US9568709B2 (en) | 2017-02-14 |
| EP2474850B1 (en) | 2016-04-06 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5709532B2 (ja) | 自動合焦装置及びそれを有するレンズ装置及び撮像システム | |
| JP3779247B2 (ja) | 撮像装置 | |
| US10264173B2 (en) | Image capturing apparatus and control method thereof, and storage medium | |
| US10033919B2 (en) | Focus adjusting apparatus, focus adjusting method, image capturing apparatus, and storage medium | |
| US8422878B2 (en) | Imaging apparatus performing auto focusing function with plurality of band pass filters and auto focusing method applied to the same | |
| US10116857B2 (en) | Focus adjustment apparatus, control method of focus adjustment apparatus, and imaging apparatus | |
| US8103158B2 (en) | Image sensing apparatus and control method thereof | |
| CN104135607A (zh) | 摄像装置及摄像装置的控制方法 | |
| JP6371555B2 (ja) | 焦点検出装置及び方法 | |
| US9936124B2 (en) | Imaging apparatus, method for controlling the same, and storage medium storing program | |
| EP2166408B1 (en) | Imaging device and imaging method using the same | |
| US10326925B2 (en) | Control apparatus for performing focus detection, image capturing apparatus, control method, and non-transitory computer-readable storage medium | |
| JP6045231B2 (ja) | 焦点調節装置、撮像装置および撮像装置の制御方法 | |
| US9609201B2 (en) | Focus adjustment apparatus, focus adjustment method, program and image pickup apparatus | |
| JP2015055635A (ja) | 撮像装置及びその制御方法 | |
| US20190320122A1 (en) | Control apparatus, image capturing apparatus, control method, and non-transitory computer-readable storage medium | |
| JP4283268B2 (ja) | 撮像装置 | |
| JP4838652B2 (ja) | 撮像装置 | |
| JP6987524B2 (ja) | 制御装置、撮像装置、制御方法、プログラム、および、記憶媒体 | |
| JP5455988B2 (ja) | 焦点検出装置およびそれを有する撮像装置 | |
| JP4574559B2 (ja) | 撮像装置、合焦位置検出装置、及び合焦位置検出方法 | |
| US10911660B2 (en) | Control apparatus, imaging apparatus, control method, and storage medium | |
| JP7130521B2 (ja) | 撮像装置、撮像装置の制御方法及びプログラム | |
| US11012609B2 (en) | Image pickup apparatus and its control method, and storage medium | |
| JP2008026786A (ja) | 撮像装置及びフォーカス制御方法 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| RD05 | Notification of revocation of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7425 Effective date: 20120730 |
|
| RD05 | Notification of revocation of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7425 Effective date: 20120731 |
|
| RD03 | Notification of appointment of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7423 Effective date: 20120831 |
|
| RD05 | Notification of revocation of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7425 Effective date: 20130701 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20131225 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20141030 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20141111 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20150113 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20150203 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20150303 |
|
| R151 | Written notification of patent or utility model registration |
Ref document number: 5709532 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R151 |
|
| LAPS | Cancellation because of no payment of annual fees |