JP5522757B2 - カメラ、カメラを有するシステム、カメラを動作させる方法及び記録された画像をデコンボリュートする方法 - Google Patents
カメラ、カメラを有するシステム、カメラを動作させる方法及び記録された画像をデコンボリュートする方法 Download PDFInfo
- Publication number
- JP5522757B2 JP5522757B2 JP2012510394A JP2012510394A JP5522757B2 JP 5522757 B2 JP5522757 B2 JP 5522757B2 JP 2012510394 A JP2012510394 A JP 2012510394A JP 2012510394 A JP2012510394 A JP 2012510394A JP 5522757 B2 JP5522757 B2 JP 5522757B2
- Authority
- JP
- Japan
- Prior art keywords
- sensor
- lens
- sweep
- subject
- camera
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
- 238000000034 method Methods 0.000 title claims description 27
- 238000001454 recorded image Methods 0.000 title description 14
- 230000033001 locomotion Effects 0.000 claims description 148
- 230000003287 optical effect Effects 0.000 claims description 41
- 238000006073 displacement reaction Methods 0.000 claims description 13
- 230000008859 change Effects 0.000 claims description 12
- 238000003384 imaging method Methods 0.000 claims description 6
- 230000003068 static effect Effects 0.000 description 15
- 238000001914 filtration Methods 0.000 description 13
- 238000005070 sampling Methods 0.000 description 12
- 230000000694 effects Effects 0.000 description 9
- 230000002123 temporal effect Effects 0.000 description 9
- 239000013598 vector Substances 0.000 description 7
- 238000001514 detection method Methods 0.000 description 4
- 230000010354 integration Effects 0.000 description 4
- 230000002829 reductive effect Effects 0.000 description 4
- 239000002131 composite material Substances 0.000 description 3
- 230000001419 dependent effect Effects 0.000 description 3
- 230000009467 reduction Effects 0.000 description 3
- 230000035945 sensitivity Effects 0.000 description 3
- 238000013519 translation Methods 0.000 description 3
- 230000003321 amplification Effects 0.000 description 2
- 238000013459 approach Methods 0.000 description 2
- 239000007788 liquid Substances 0.000 description 2
- 238000012544 monitoring process Methods 0.000 description 2
- 238000003199 nucleic acid amplification method Methods 0.000 description 2
- 238000012634 optical imaging Methods 0.000 description 2
- 230000010363 phase shift Effects 0.000 description 2
- 230000002441 reversible effect Effects 0.000 description 2
- 238000001228 spectrum Methods 0.000 description 2
- 238000010408 sweeping Methods 0.000 description 2
- 238000004458 analytical method Methods 0.000 description 1
- 230000009286 beneficial effect Effects 0.000 description 1
- 230000008901 benefit Effects 0.000 description 1
- 238000004364 calculation method Methods 0.000 description 1
- 150000001875 compounds Chemical class 0.000 description 1
- 238000012790 confirmation Methods 0.000 description 1
- 230000008094 contradictory effect Effects 0.000 description 1
- 238000001816 cooling Methods 0.000 description 1
- 230000003247 decreasing effect Effects 0.000 description 1
- 238000013461 design Methods 0.000 description 1
- 238000005516 engineering process Methods 0.000 description 1
- 239000012530 fluid Substances 0.000 description 1
- 238000005286 illumination Methods 0.000 description 1
- 230000006872 improvement Effects 0.000 description 1
- 238000007373 indentation Methods 0.000 description 1
- 230000000670 limiting effect Effects 0.000 description 1
- 239000004973 liquid crystal related substance Substances 0.000 description 1
- 239000000463 material Substances 0.000 description 1
- 238000005259 measurement Methods 0.000 description 1
- 239000012528 membrane Substances 0.000 description 1
- 238000004091 panning Methods 0.000 description 1
- 229920013655 poly(bisphenol-A sulfone) Polymers 0.000 description 1
- 238000012805 post-processing Methods 0.000 description 1
- 230000008569 process Effects 0.000 description 1
- 238000012545 processing Methods 0.000 description 1
- 238000012552 review Methods 0.000 description 1
- 230000001360 synchronised effect Effects 0.000 description 1
- 230000036962 time dependent Effects 0.000 description 1
Images






















Classifications
-
- G06T5/73—
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N23/00—Cameras or camera modules comprising electronic image sensors; Control thereof
- H04N23/60—Control of cameras or camera modules
- H04N23/68—Control of cameras or camera modules for stable pick-up of the scene, e.g. compensating for camera body vibrations
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T2207/00—Indexing scheme for image analysis or image enhancement
- G06T2207/20—Special algorithmic details
- G06T2207/20172—Image enhancement details
- G06T2207/20201—Motion blur correction
Description
Vsweep*A/b2>0.25sec−1
を満たすことを特徴とし、ここで、Vsweepは光軸に沿ったセンサの動き及び/若しくはレンズの動き並びに/又は秒あたりの焦点距離の変化であり、Aは絞り値であり、bはレンズとセンサとの間の距離である。
Vsweep*A/b2>0.25sec−1
を満たすことを特徴とし、ここで、Vsweepは光軸に沿った前記センサの動き及び/若しくはレンズの動き並びに/又は秒あたりの焦点距離の変化であり、Aは絞り値であり、bはレンズとセンサとの間の距離である、方法に関する。
よって、f(t)=1/(1/v+1/(b(t))
ここで、b(t)は画像平面の位置を表す。
一次のオーダーの近似で、vはほとんど常にbよりかなり大きいとすると、
df(t)/dt=db(t)/dt
Vsweep*A/b2>0.25sec−1
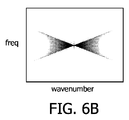
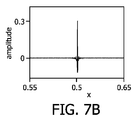
図6A乃至図6Cの例では、以下の条件を満たす。
Vsweep=22.4mm/秒(sec)
A=2mm
b=4.002mm
レンズまでの被写体距離=10m
露出時間=0.02秒
Vsweep*A/b2=2.8sec−1
A:被写体のパラメータ、すなわち、被写体の速度対レンズに対する被写体の距離。レンズからより離れている被写体は、レンズにより近い被写体と、同じ速度でより容易に捕獲できる。このパラメータは、基本的に、被写体がセンサ画像を通ってどれくらい速く進むかの尺度を提供する。
B:カメラ又はカメラシステムのパラメータ:
Bl:センサの掃引レート。掃引レートが大きいほど、動き不変の画像が可能である最大被写体速度が高い。
B2:絞り値。絞り値が大きいほど、動き不変の画像が可能である最大被写体速度が高い。
B3:レンズ―センサ距離。
関連したカメラパラメータは、B1*B2/(B3)2、すなわち、Vsweep*A/b2である。
表1

b=b0+c0t
画像平面距離は、以下のレンズ式を介して被写体距離及びレンズの焦点距離に関係する。
1/f=1/v+1/b
f(t)=1/(1/v+1/(b0+c0t))
ここで、f(t)は時間の関数としてレンズ焦点距離を示し、c0は定数である。
α=xf2/(VL(x−f)2)
xは被写体(撮像されるポイント)からレンズまでの距離であり、fはレンズ焦点距離、VLはセンサの光軸に沿った変位の速度である。dmaxは、画像平面上の被写体画像の位置に関する不確定パラメータである(すなわち、センサ中心から距離dでセンサ上の位置にある被写体ポイントからレンズ中心を通る中央光線は、距離d<dmaxを持たなければならない)。これは、α倍のv_averageで変位される、1.25*alpha*Cmax+dmaxの半径を持つ円に対応する。
Claims (17)
- レンズ及び画像センサを有する画像を記録するためのカメラであって、光軸に沿った前記レンズと前記画像センサとの間の距離と、焦点距離との比が、撮像の露出時間の間に変化するカメラにおいて、カメラは
Vsweep*A/b2>0.25sec−1
を満たすように前記比を変化させることを特徴とし、ここで、Vsweepは光軸に沿った前記センサの動き及び/若しくはレンズの動き並びに/又は秒あたりの焦点距離の変化であり、Aは前記レンズの絞り値であり、bはレンズとセンサとの間の距離である、カメラ。 - Vsweep*A/b2が0.5sec−1より大きい、請求項1に記載のカメラ。
- Vsweep*A/b2が15sec−1より小さい、請求項1に記載のカメラ。
- 露出時間が0.005秒と0.05秒との間である、請求項1乃至3の何れか一項に記載のカメラ。
- V sweep が線形である、請求項1乃至4の何れか一項に記載のカメラ。
- 焦点深度の全ての可能な範囲を超えた位置に前記センサが到達するように前記比が変化する、請求項1乃至5の何れか一項に記載のカメラ。
- 前記光軸に沿った対向する前記センサと焦点面との変位が、少なくとも露出時間の上半分の範囲の時間において、露出時間に依存する、請求項1乃至6の何れか一項に記載のカメラ。
- 前記レンズの少なくとも一つの特性が変化する、請求項1乃至7の何れか一項に記載のカメラ。
- 被写体との距離を測定する手段を有し、Vsweepが測定された距離に依存する、請求項1乃至8の何れか一項に記載のカメラ。
- カメラがビデオカメラであって、露出の間の動きが一方向のみである、請求項1乃至9の何れか一項に記載のカメラ。
- 請求項1乃至10の何れか一項に記載のカメラを有する、画像を記録するためのシステムであって、デコンボリューションのための点広がり逆関数を使用して、前記カメラにより記録された画像のデコンボリューションのためのデコンボリュータを更に有する、システム。
- 前記デコンボリュータが、前記レンズまでの被写体の距離、被写体の速度、被写体の速度の方向、掃引レート、A、b、掃引距離、露出時間から成るパラメータのグループの一つ以上を入力するための入力部を持つ、請求項11に記載のシステム。
- 入力のための前記パラメータのグループの少なくとも一つは、前記レンズまでの被写体の距離である、請求項12に記載のシステム。
- レンズ及び画像センサを有するカメラを使用して画像を記録するための方法であって、前記レンズと前記画像センサとの間の距離と、焦点距離との比が、画像の露出時間の間に光軸に沿って変化され、画像の記録の間、
Vsweep*A/b2>0.25sec−1
を満たすことを特徴とし、ここで、Vsweepは光軸に沿った前記センサの動き及び/若しくはレンズの動き並びに/又は秒あたりの焦点距離の変化であり、Aは絞り値であり、bは前記レンズと前記センサとの間の距離である、方法。 - 前記レンズまでの被写体の距離、被写体の速度、被写体の速度の方向から成るパラメータのグループの少なくとも一つ以上が測定され、Vsweepが測定されたパラメータに依存して設定される、請求項14に記載の方法。
- 請求項14又は15の方法を使用して記録された画像をデコンボリューションするための方法であって、デコンボリューションが点広がり逆関数を使用して実施される、方法。
- 前記点広がり逆関数が、入力データに依存して確立され、前記入力データは、レンズまでの被写体の距離、被写体の速度、被写体の速度の方向、掃引レート、A、b、掃引距離、露出時間から成るパラメータのグループの一つ以上である、請求項16に記載の方法。
Applications Claiming Priority (5)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| EP09160007.2 | 2009-05-12 | ||
| EP09160007 | 2009-05-12 | ||
| EP09163440.2 | 2009-06-23 | ||
| EP09163440 | 2009-06-23 | ||
| PCT/IB2010/051847 WO2010131142A1 (en) | 2009-05-12 | 2010-04-28 | Camera, system comprising a camera, method of operating a camera and method for deconvoluting a recorded image |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2012527145A JP2012527145A (ja) | 2012-11-01 |
| JP2012527145A5 JP2012527145A5 (ja) | 2013-06-13 |
| JP5522757B2 true JP5522757B2 (ja) | 2014-06-18 |
Family
ID=42310697
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2012510394A Active JP5522757B2 (ja) | 2009-05-12 | 2010-04-28 | カメラ、カメラを有するシステム、カメラを動作させる方法及び記録された画像をデコンボリュートする方法 |
Country Status (7)
| Country | Link |
|---|---|
| US (1) | US8605202B2 (ja) |
| EP (1) | EP2430826A1 (ja) |
| JP (1) | JP5522757B2 (ja) |
| CN (1) | CN102422629B (ja) |
| RU (1) | RU2529661C2 (ja) |
| TW (1) | TWI521961B (ja) |
| WO (1) | WO2010131142A1 (ja) |
Families Citing this family (33)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN102714707B (zh) | 2010-01-05 | 2015-06-03 | 皇家飞利浦电子股份有限公司 | 图像投影设备和方法 |
| US8537238B2 (en) * | 2010-04-14 | 2013-09-17 | Sony Corporation | Digital camera and method for capturing and deblurring images |
| JP5591090B2 (ja) * | 2010-12-13 | 2014-09-17 | キヤノン株式会社 | 画像処理装置およびその方法 |
| EP2654606B1 (en) * | 2010-12-21 | 2021-05-26 | 3Shape A/S | Motion blur compensation |
| US9888225B2 (en) | 2011-02-04 | 2018-02-06 | Koninklijke Philips N.V. | Method of recording an image and obtaining 3D information from the image, camera system |
| EP2688284B1 (en) * | 2011-03-14 | 2017-10-25 | Panasonic Corporation | Imaging device, imaging method, integrated circuit, and computer program |
| EP2503364A1 (en) | 2011-03-22 | 2012-09-26 | Koninklijke Philips Electronics N.V. | Camera system comprising a camera, camera, method of operating a camera and method for deconvoluting a recorded image |
| US9189451B1 (en) * | 2011-10-06 | 2015-11-17 | RKF Engineering Solutions, LLC | Detecting orbital debris |
| JP2013110700A (ja) * | 2011-11-24 | 2013-06-06 | Samsung Electronics Co Ltd | 撮像装置、撮像方法、及び画像処理装置 |
| WO2013087974A1 (en) * | 2011-12-16 | 2013-06-20 | Nokia Corporation | Method and apparatus for image capture targeting |
| US8638989B2 (en) | 2012-01-17 | 2014-01-28 | Leap Motion, Inc. | Systems and methods for capturing motion in three-dimensional space |
| US8693731B2 (en) | 2012-01-17 | 2014-04-08 | Leap Motion, Inc. | Enhanced contrast for object detection and characterization by optical imaging |
| US9679215B2 (en) | 2012-01-17 | 2017-06-13 | Leap Motion, Inc. | Systems and methods for machine control |
| US10691219B2 (en) | 2012-01-17 | 2020-06-23 | Ultrahaptics IP Two Limited | Systems and methods for machine control |
| US9501152B2 (en) | 2013-01-15 | 2016-11-22 | Leap Motion, Inc. | Free-space user interface and control using virtual constructs |
| US11493998B2 (en) | 2012-01-17 | 2022-11-08 | Ultrahaptics IP Two Limited | Systems and methods for machine control |
| US20150036008A1 (en) * | 2012-03-26 | 2015-02-05 | Nokia Corporation | Method, Apparatus and Computer Program Product for Image Stabilization |
| CN103379269B (zh) * | 2012-04-26 | 2017-11-24 | 富泰华工业(深圳)有限公司 | 拍摄系统、拍摄方法及使用该拍摄系统的电子设备 |
| US9191578B2 (en) * | 2012-06-29 | 2015-11-17 | Broadcom Corporation | Enhanced image processing with lens motion |
| US9459697B2 (en) | 2013-01-15 | 2016-10-04 | Leap Motion, Inc. | Dynamic, free-space user interactions for machine control |
| US20140210707A1 (en) * | 2013-01-25 | 2014-07-31 | Leap Motion, Inc. | Image capture system and method |
| US9558555B2 (en) | 2013-02-22 | 2017-01-31 | Leap Motion, Inc. | Adjusting motion capture based on the distance between tracked objects |
| US9733715B2 (en) | 2013-03-15 | 2017-08-15 | Leap Motion, Inc. | Resource-responsive motion capture |
| US9702977B2 (en) | 2013-03-15 | 2017-07-11 | Leap Motion, Inc. | Determining positional information of an object in space |
| US9916009B2 (en) | 2013-04-26 | 2018-03-13 | Leap Motion, Inc. | Non-tactile interface systems and methods |
| US10281987B1 (en) | 2013-08-09 | 2019-05-07 | Leap Motion, Inc. | Systems and methods of free-space gestural interaction |
| US9721383B1 (en) | 2013-08-29 | 2017-08-01 | Leap Motion, Inc. | Predictive information for free space gesture control and communication |
| US9632572B2 (en) | 2013-10-03 | 2017-04-25 | Leap Motion, Inc. | Enhanced field of view to augment three-dimensional (3D) sensory space for free-space gesture interpretation |
| US9996638B1 (en) | 2013-10-31 | 2018-06-12 | Leap Motion, Inc. | Predictive information for free space gesture control and communication |
| WO2015136327A1 (en) * | 2014-03-12 | 2015-09-17 | Sony Corporation | Method, system and computer program product for debluring images |
| CN204480228U (zh) | 2014-08-08 | 2015-07-15 | 厉动公司 | 运动感测和成像设备 |
| WO2017073059A1 (ja) | 2015-10-26 | 2017-05-04 | 京セラ株式会社 | 撮像装置 |
| CN112104808B (zh) * | 2019-06-18 | 2022-06-21 | 长城汽车股份有限公司 | 图像采集装置和具有其的视觉处理系统、无人驾驶车辆 |
Family Cites Families (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US5134432A (en) * | 1990-02-14 | 1992-07-28 | Asahi Kogaku Kogyo Kabushiki Kaisha | Camera with mid-exposure zooming function |
| EP1402720A1 (en) | 2001-06-18 | 2004-03-31 | Koninklijke Philips Electronics N.V. | Anti motion blur display |
| KR20040103786A (ko) * | 2003-06-02 | 2004-12-09 | 펜탁스 가부시키가이샤 | 다초점 촬상 장치 및 다초점 촬상 장치를 가진 모바일 장치 |
| US7330594B2 (en) * | 2003-07-31 | 2008-02-12 | Kabushiki Kaisha Toshiba | Image enhancement or correction software, method, apparatus and system for substantially minimizing blur in the scanned image |
| JP5013705B2 (ja) * | 2005-11-21 | 2012-08-29 | 三星電子株式会社 | 撮像装置,画面表示方法,焦点調整方法,露出調整方法,およびコンピュータプログラム |
| US7711259B2 (en) * | 2006-07-14 | 2010-05-04 | Aptina Imaging Corporation | Method and apparatus for increasing depth of field for an imager |
| WO2009120718A1 (en) * | 2008-03-24 | 2009-10-01 | The Trustees Of Columbia University In The City Of New York | Methods, systems, and media for controlling depth of field in images |
| US8451338B2 (en) * | 2008-03-28 | 2013-05-28 | Massachusetts Institute Of Technology | Method and apparatus for motion invariant imaging |
-
2010
- 2010-04-28 RU RU2011150257/28A patent/RU2529661C2/ru active
- 2010-04-28 CN CN201080020801.4A patent/CN102422629B/zh active Active
- 2010-04-28 JP JP2012510394A patent/JP5522757B2/ja active Active
- 2010-04-28 US US13/319,800 patent/US8605202B2/en active Active
- 2010-04-28 EP EP10719389A patent/EP2430826A1/en not_active Ceased
- 2010-04-28 WO PCT/IB2010/051847 patent/WO2010131142A1/en active Application Filing
- 2010-05-07 TW TW099114708A patent/TWI521961B/zh active
Also Published As
| Publication number | Publication date |
|---|---|
| WO2010131142A1 (en) | 2010-11-18 |
| CN102422629A (zh) | 2012-04-18 |
| CN102422629B (zh) | 2015-04-29 |
| RU2011150257A (ru) | 2013-06-20 |
| TW201106682A (en) | 2011-02-16 |
| RU2529661C2 (ru) | 2014-09-27 |
| TWI521961B (zh) | 2016-02-11 |
| US20120062787A1 (en) | 2012-03-15 |
| JP2012527145A (ja) | 2012-11-01 |
| EP2430826A1 (en) | 2012-03-21 |
| US8605202B2 (en) | 2013-12-10 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5522757B2 (ja) | カメラ、カメラを有するシステム、カメラを動作させる方法及び記録された画像をデコンボリュートする方法 | |
| US8432434B2 (en) | Camera and method for focus based depth reconstruction of dynamic scenes | |
| JP5870264B2 (ja) | 撮像装置、撮像方法、プログラム、および集積回路 | |
| JP5868183B2 (ja) | 撮像装置及び撮像方法 | |
| CN106412426B (zh) | 全聚焦摄影装置及方法 | |
| JP5134694B2 (ja) | 画像処理装置及び画像処理方法 | |
| KR101494066B1 (ko) | 공간 광 패턴에 기초한 깊이 데이터의 생성 | |
| JP5976772B2 (ja) | カメラを有するカメラシステム、カメラ、カメラを動作させる方法、及び、記録された画像を解析する方法 | |
| WO2010016625A1 (ja) | 画像撮影装置およびその距離演算方法と合焦画像取得方法 | |
| CN102369722B (zh) | 摄像装置以及摄像方法、和用于所述摄像装置的图像处理方法 | |
| US9407827B2 (en) | Method and system for capturing sequences of images with compensation for variations in magnification | |
| JP6202910B2 (ja) | 映像処理装置およびその制御方法、プログラム | |
| GB2545551A (en) | Imaging device and imaging method | |
| JP2018017876A (ja) | 撮像装置及びその制御方法、及び画像処理装置及び方法 | |
| JP2012142729A (ja) | カメラ | |
| US10151933B2 (en) | Apparatus and optical system including an optical element | |
| JP4460711B2 (ja) | 撮像装置 | |
| JP6625184B2 (ja) | 焦点検出装置、撮像装置、焦点検出方法および焦点検出プログラム | |
| JP7463078B2 (ja) | 撮像装置 | |
| Nagahara et al. | Computational photography using programmable aperture |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20130424 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20130424 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20140307 |
|
| RD02 | Notification of acceptance of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7422 Effective date: 20140403 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20140403 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 5522757 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |