(第1の実施形態)
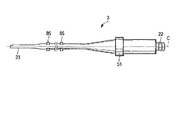
本発明の第1の実施形態について図1乃至図14Bを参照して説明する。図1は、本実施形態の把持処置装置1を示す図である。図1に示すように、把持処置装置1は、長手軸Cを有する。ここで、長手軸Cに平行な2方向の一方を先端方向(図1の矢印A1の方向)とし、先端方向と反対方向を基端方向(図1の矢印A2の方向)とする。
外科手術装置である把持処置装置1は、振動子ユニット2と、プローブ3と、ハンドルユニット4と、シース5とを備える。振動子ユニット2は、振動子ケース11を備える。振動子ケース11の基端には、ケーブル6の一端が接続されている。ケーブル6の他端は、電源ユニット7に接続されている。電源ユニット7は、超音波発生電流供給部8と、高周波電流供給部9と、制御部10と、を備える。なお、把持処置装置1と電源ユニット7とにより、外科手術システムが構成されている。
図2は、振動子ユニット2の構成を示す図である。図2に示すように、振動子ケース11の内部には、電流を超音波振動に変換する圧電素子を備える超音波振動子12が設けられている。超音波振動子12には、電気信号線13A,13Bの一端が接続されている。電気信号線13A,13Bは、ケーブル6の内部を通って、他端が電源ユニット7の超音波発生電流供給部8に接続されている。超音波発生電流供給部8から電気信号線13A,13Bを介して超音波振動子12に電流を供給することにより、超音波振動子12で超音波振動が発生する。超音波振動子12の先端方向側には、超音波振動の振幅を拡大する柱状のホーン15が連結されている。
ホーン15は、振動子ケース11によって支持され、振動子ケース11との間は電気的に絶縁されている。また、ホーン15の先端部には、雌ネジ部16が形成されている。また、超音波振動子12には、電気信号線13A,13Bとは別に、電源ユニット7の高周波電流供給部9からケーブル6の内部を通って延設される電気信号線17が接続されている。
図3は、プローブ3の構成を示す図である。図3に示すように、プローブ3は、長手軸Cに沿って柱状に形成されている。把持処置装置1の長手軸Cは、プローブ3の軸中心を通る。プローブ3の基端方向側の部位には、雄ネジ部22が設けられている。プローブ3の雄ネジ部22がホーン15の雌ネジ部16と螺合することにより、ホーン15にプローブ3が取付けられる。
ホーン15にプローブ3が取付けられることにより、超音波振動子12で発生した超音波振動が、ホーン15を介して、プローブ3の先端部まで伝達可能である。すなわち、プローブ3では、基端方向から先端方向へ超音波振動を伝達可能である。また、プローブ3の先端部には、第1の電極部23が設けられている。ホーン15にプローブ3が取付けられることにより、高周波電流供給部9から、電気信号線17、超音波振動子12、ホーン15、プローブ3を通して、第1の電極部23に高周波電流を伝達可能となる。高周波電流が伝達されることにより、第1の電極部23は第1の電位E1を有する。
図1に示すように、ハンドルユニット4は、長手軸Cに沿って延設される筒状ケース31を備える。筒状ケース31は絶縁材料から形成されている。筒状ケース31からは、長手軸Cに対して傾斜した方向に向かって、固定ハンドル32が延設されている。固定ハンドル32は、筒状ケース31と一体に形成されている。また、筒状ケース31には、第1の可動ハンドル33及び第2の可動ハンドル35が回動可能に取付けられている。第1の可動ハンドル33及び第2の可動ハンドル35は、固定ハンドル32に対して長手軸Cと略平行に開閉可能である。第1の可動ハンドル33及び第2の可動ハンドル35は、固定ハンドル32より先端方向側に位置している。
筒状ケース31には、振動子ユニット2が基端方向側から連結され、シース5が先端方向側から連結されている。また、筒状ケース31の内部にはプローブ3が先端方向側から挿入され、シース5にはプローブ3が挿通されている。シース5の先端部には、ジョー42が回動可能に取付けられている。ジョー42は、プローブ3の第1の電極部23に対して開閉可能である。ジョー42の第1の電極部23に対する開閉操作は、第1の可動ハンドル33又は第2の可動ハンドル35により行われる。すなわち、第1の可動ハンドル33がジョー42の開閉操作を行う開閉操作入力部の一部となり、第2の可動ハンドル35がジョー42の開閉操作を行う開閉操作入力部の一部となる。
また、ハンドルユニット4は、筒状ケース31の先端方向側に連結される回転操作入力部である回転操作ノブ37を備える。回転操作ノブ37は、筒状ケース31に対して長手軸回り方向に回転可能に連結されている。回転操作ノブ37が筒状ケース31に対して回転することにより、筒状ケース31に対して振動子ユニット2、プローブ3、シース5及びジョー42が長手軸回り方向に回転する。
図4は、ハンドルユニット4の内部の構成を示す図である。図4に示すように、プローブ3及びシース5は、回転操作ノブ37の内部を通って、筒状ケース31の内部まで長手軸Cに沿って延設されている。筒状ケース31の内部では、プローブ3の基端がホーン15に取付けられている。これにより、振動子ユニット2とプローブ3とが連結される。また、筒状ケース31の内部では、シース5の基端部が振動子ケース11に連結されている。これにより、振動子ユニット2とシース5とが連結されている。
ハンドルユニット4の筒状ケース31の内部には、プローブ3とシース5との間を連結する接続筒状部材45が、設けられている。また、シース5は、接続筒状部材45の外周方向側に設けられる可動筒状部材46を備える。接続筒状部材45及び可動筒状部材46は、長手軸Cに沿って設けられている。接続筒状部材45は、樹脂等の絶縁材料から形成されている。可動筒状部材46は、金属等の導電材料から形成されている。
図5は、図4のV−V線断面図である。図4及び図5に示すように、回転操作ノブ37には、係合ピン47A,47Bが互いに対して長手軸回り方向に離れた状態で固定されている。係合ピン47A,47Bは、回転操作ノブ37の内周部から内周方向に突出している。可動筒状部材46には、貫通孔48A,48Bが互いに対して長手軸回り方向に離れた状態で設けられている。それぞれの貫通孔48A,48Bは、長手軸Cに沿って長孔状に形成され、可動筒状部材46を径方向に貫通している。また、接続筒状部材45には、内周方向に凹んだ係合凹部49A,49Bが設けられている。係合凹部49A,49Bは、互いに対して長手軸回り方向に離れた状態で設けられている。
係合ピン47Aは、貫通孔48Aに挿通され、係合凹部49Aに係合している。また、係合ピン47Bは、貫通孔48Bに挿通され、係合凹部49Bに係合している。それぞれの係合ピン47A,47Bが対応する係合凹部49A,49Bに係合することにより、接続筒状部材45が回転操作ノブ37に固定される。また、それぞれの係合ピン47A,47Bが対応する貫通孔48A,48Bに挿通されることにより、可動筒状部材46及び回転操作ノブ37が、互いに対して長手軸回り方向に回転不可能な状態に、規制される。ただし、貫通孔48A,48Bは長手軸Cに沿って長孔状に形成されるため、可動筒状部材46は、回転操作ノブ37及び接続筒状部材45に対して長手軸Cに沿って移動可能である。以上のような構成にすることにより、接続筒状部材45及び可動筒状部材46は、回転操作ノブ37と一体に筒状ケース31に対して長手軸回り方向に回転可能となる。また、可動筒状部材46は、プローブ3及びハンドルユニット4に対して、長手軸Cに沿って移動可能となる。
プローブ3の基端部の外周部には、絶縁材料から形成される弾性部材51が固定されている(図3参照)。プローブ3がホーン15に連結された状態では、弾性部材51は超音波振動の節位置に位置している。弾性部材51は、接続筒状部材45の内周部により内周方向に押圧され、収縮している。弾性部材51が収縮することにより、プローブ3が接続筒状部材45に対して固定される。これにより、プローブ3とシース5との間が、接続筒状部材45及び弾性部材51により、連結される。
回転操作ノブ37を長手軸回り方向に回転した際には、回転操作ノブ37からの回転駆動力が、接続筒状部材45及び弾性部材51を介して、プローブ3に伝達される。したがって、プローブ3が、回転操作ノブ37及び接続筒状部材45と一体に、筒状ケース31に対して回転可能となる。また、接続筒状部材45及び弾性部材51は絶縁材料から形成されるため、プローブ3と可動筒状部材46との間は電気的に絶縁されている。
図4に示すように、シース5と振動子ユニット2との連結部では、可動筒状部材46が振動子ケース11に挿入された状態で、可動筒状部材46と振動子ケース11とが係合している。可動筒状部材46と振動子ケース11との間では、互いに対する長手軸回り方向の回転が規制されている。ただし、可動筒状部材46は、振動子ケース11に対して長手軸Cに沿って移動可能である。
また、シース5と振動子ケース11との連結部では、振動子ケース11の外周方向側に、電気接続リング53が設けられている。電気接続リング53は、ハンドルユニット4の筒状ケース31に固定された状態で設けられている。振動子ケース11がシース5(可動筒状部材46)に連結された状態では、振動子ケース11の先端部の外周部は電気接続リング53と接触し、振動子ケース11の先端部の内周部は可動筒状部材46と接触している。また、振動子ケース11及びシース5は、電気接続リング53に対して、長手軸回り方向に一体に回転可能である。
筒状ケース31と固定ハンドル32との間には、スイッチ配置部55が設けられている。スイッチ配置部55は、筒状ケース31及び固定ハンドル32と一体に形成されている。スイッチ配置部55は、長手軸Cに略垂直な平面部56を備える。平面部56は、長手軸Cを中心として固定ハンドル32、第1の可動ハンドル33及び第2の可動ハンドル35が位置する側に設けられている。また、平面部56は、第1の可動ハンドル33及び第2の可動ハンドル35より先端方向側に位置している。
平面部56には、第1の処置モード入力部である第1の処置モード入力ボタン57Aと、第2の処置モード入力部である第2の処置モード入力ボタン57Bと、が設けられている。第1の処置モード入力ボタン57Aを押圧することにより、第1の処置モードへの入力操作が行われ、第2の処置モード入力ボタン57Bを押圧することにより、第2の処置モードへの入力操作が行われる。スイッチ配置部55の内部には、第1のスイッチ部58A及び第2のスイッチ部58Bと、電気回路基板59と、が設けられている。第1のスイッチ部58Aは、第1の処置モード入力ボタン57Aでの入力操作により開閉状態が切替えられる。同様に、第2のスイッチ部58Bは、第2の処置モード入力ボタン57Bでの入力操作により開閉状態が切替えられる。
図6は、振動子ケース11での電気接続状態を概略的に示す図である。図4及び図6に示すように、筒状ケース31の内部には、3つの電気信号線61A〜61Cが設けられている。電気信号線61Aは、電気回路基板59上の電気回路を介して、第1のスイッチ部58Aに電気的に接続されている。電気信号線61Bは、電気回路基板59上の電気回路を介して、第2のスイッチ部58Bに電気的に接続されている。電気信号線61Cは、電気回路基板59上の電気回路を介して、第1のスイッチ部58A及び第2のスイッチ部58Bに電気的に接続されている。電気信号線61Cは、第1のスイッチ部58A及び第2のスイッチ部58Bのグランド線として共用されるコモン線である。
電気接続リング53は、第1の電気接続部62A、第2の電気接続部62B及び第3の電気接続部62Cを備える。第1の電気接続部62Aと第2の電気接続部62Bとの間、第2の電気接続部62Bと第3の電気接続部62Cとの間、及び、第1の電気接続部62Aと第3の電気接続部62Cとの間は、電気的に絶縁されている。電気信号線61Aは、第1の電気接続部62Aに接続されている。電気信号線61Bは、第2の電気接続部62Bに接続されている。電気信号線61Cは、第3の電気接続部62Cに接続されている。
また、振動子ケース11は、第1の導電部63A、第2の導電部63B、及び、第3の導電部63Cを備える。第1の導電部63A、第2の導電部63B及び第3の導電部63Cは、長手軸Cに沿って延設されている。第1の導電部63Aと第2の導電部63Bとの間、第2の導電部63Bと第3の導電部63Cとの間、及び、第1の導電部63Aと第3の導電部63Cとの間は、電気的に絶縁されている。振動子ケース11が可動筒状部材46(シース5)に連結された状態では、電気接続リング53の第1の電気接続部62Aには、第1の導電部63Aの先端部のみが電気的に接触する。同様に、電気接続リング53の第2の電気接続部62Bには、第2の導電部63Bの先端部のみが電気的に接触する。そして、電気接続リング53の第3の電気接続部62Cには、第3の導電部63Cの先端部のみが電気的に接触する。
第1の導電部63Aの基端部には、電気信号線65の一端が接続されている。第2の導電部63Bの基端部には、電気信号線66の一端が接続されている。第3の導電部63Cの基端部には、電気信号線67の一端が接続されている。電気信号線65〜67は、ケーブル6の内部を通って、他端が電源ユニット7の制御部10に接続されている。
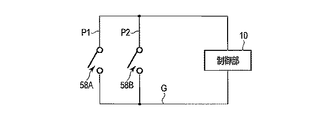
以上のように、第1のスイッチ部58Aから、電気信号線61A、第1の電気接続部62A、第1の導電部63A、電気信号線65を通って、電源ユニット7の制御部10まで第1の電気信号経路P1が形成されている。また、第2のスイッチ部58Bから、電気信号線61B、第2の電気接続部62B、第2の導電部63B、電気信号線66を通って、電源ユニット7の制御部10まで第2の電気信号経路P2が形成されている。また、第1のスイッチ部58A及び第2のスイッチ部58Bから、電気信号線61C、第3の電気接続部62C、第3の導電部63C、電気信号線67を通って、制御部10までグランド経路Gが形成されている。
図7は、第1のスイッチ部58A及び第2のスイッチ部58Bと制御部10との間の電気接続状態を示す回路図である。図7に示すように、前述した電気接続状態では、第1の処置モード入力ボタン57Aを押圧することにより、第1のスイッチ部58Aが閉状態になり、第1のスイッチ部58Aで第1の電気信号経路P1とグランド経路Gとの間が電気的に接続される。これにより、第1の処置モード入力ボタン57A(第1のスイッチ部58A)から電源ユニット7の制御部10に電気信号が伝達される。そして、超音波発生電流供給部8から超音波発生電流が出力されるとともに、高周波電流供給部9から高周波電流が出力される。すなわち、第1の処置モード入力ボタン57Aを押圧することにより、第1の処置モードが選択される。
また、第2の処置モード入力ボタン57Bを押圧することにより、第2のスイッチ部58Bが閉状態になり、第2のスイッチ部58Bで第2の電気信号経路P2とグランド経路Gとの間が電気的に接続される。これにより、第2の処置モード入力ボタン57B(第2のスイッチ部58B)から電源ユニット7の制御部10に電気信号が伝達される。そして、高周波電流供給部9から高周波電流が出力される。この際、超音波発生電流供給部8から超音波発生電流は出力されない。すなわち、第2の処置モード入力ボタン57Bを押圧することにより、第1の処置モードとは異なる第2の処置モードが選択される。
図6に示すように、振動子ケース11は、長手軸Cに沿って延設される第4の導電部63Dを備える。第1の導電部63A、第2の導電部63B、及び、第3の導電部63Cはいずれも、第4の導電部63Dとの間が電気的に絶縁されている。第4の導電部63Dの基端部には、電源ユニット7の高周波電流供給部9からケーブル6の内部を通って延設される電気信号線69が接続されている。振動子ケース11が可動筒状部材46(シース5)に連結された状態では、可動筒状部材46には、第4の導電部63Dの先端部のみが電気的に接触する。以上のようにして、高周波電流供給部9とシース5の可動筒状部材46との間では、電気信号線69、第4の導電部63Dを介して、高周波電流が伝達される。
図4に示すように、シース5は、回転操作ノブ37の内周方向側に位置する固定筒状部材71を備える。固定筒状部材71は、回転操作ノブ37に固定され、樹脂等の絶縁材料から形成されている。固定筒状部材71の先端部には、外側チューブ72の基端部及び外側パイプ73の基端部が固定されている。外側チューブ72は、外側パイプ73より外周方向側に位置し、シース5の外装を形成している。外側チューブ72は、樹脂等の絶縁材料から形成されている。外側パイプ73より内周方向側には、内側チューブ75が設けられている。内側チューブ75は、樹脂等の絶縁性材料から形成され、固定ピン76A,76Bを介して外側パイプ73に固定されている。以上のような構成にすることにより、回転操作ノブ37は、外側チューブ72、外側パイプ73及び内側チューブ75と一体に、筒状ケース31に対して長手軸回り方向に回転可能となる。
シース5は、径方向について外側パイプ73と内側チューブ75との間に設けられる内側パイプ77を備える。内側パイプ77は、接続部材78及び接続ピン79を介して、可動筒状部材46の先端部に固定されている。内側パイプ77は、可動筒状部材46と一体に外側チューブ72、外側パイプ73及び内側チューブ75に対して長手軸Cに沿って移動可能である。すなわち、内側パイプ77は、可動筒状部材46と一体にハンドルユニット4及びプローブ3に対して、長手軸Cに沿って移動可能である。ここで、可動筒状部材46及び内側パイプ77が、プローブ3に対して長手軸Cに沿って移動可能な可動部となる。
また、内側パイプ77は可動筒状部材46に固定されているため、回転操作ノブ37での回転操作が、可動筒状部材46を介して伝達される。したがって、内側パイプ77は、回転操作ノブ37と一体に、筒状ケース31に対して長手軸回り方向に回転可能である。前述のように、回転操作ノブ37は、外側チューブ72、外側パイプ73及び内側チューブ75と一体に、筒状ケース31に対して長手軸回り方向に回転可能である。したがって、シース5は、回転操作ノブ37と一体に、筒状ケース31に対して長手軸回り方向に回転可能である。また、内側パイプ77は、金属等の導電材料から形成されている。可動筒状部材46と内側パイプ77との間では、接続部材78及び接続ピン79を介して、高周波電流が伝達される。
図8は、プローブ3の先端部、シース5の先端部及びジョー42を示す図である。図8に示すように、外側チューブ72、外側パイプ73、内側チューブ75及び内側パイプ77は、シース5の先端部まで長手軸Cに沿って延設されている。図3に示すように、プローブ本体21の外周部には、絶縁材料から形成される複数の支持部材85が形成されている。それぞれの支持部材85は、長手軸Cに平行な方向についてその他の支持部材85から離れて配置されている。プローブ3がホーン15に連結された状態では、それぞれの支持部材85は超音波振動の節位置に位置している。
支持部材85は、プローブ3とシース5との間でプローブを支持している。また、支持部材85により、内側チューブ75(シース5)とプローブ3との接触が防止される。前述のように、接続筒状部材45及び弾性部材51は絶縁材料から形成されるため、プローブ3と可動筒状部材46(シース5)との間は電気的に絶縁されている。したがって、接続筒状部材45、弾性部材51及び支持部材85により、シース5プローブ3との間が電気的に絶縁される。
図8に示すように、シース5の先端部(外側チューブ72の先端部及び外側パイプ73の先端部)には、連結ネジ87を介してジョー42が取付けられている。ジョー42は、連結ネジ87を中心としてシース5に対して回動可能である。また、内側パイプ77の先端部は、接続ピン89を介してジョー42に連結されている。内側パイプ77とジョー42との間では、接続ピン89を介して高周波電流が伝達される。以上のようにして、高周波電流供給部9から、電気信号線69、第4の導電部63E、可動筒状部材46、内側パイプ77を通って、ジョー42まで、高周波電流が伝達可能である。
図9は、ジョー42の構成を示す図であり、図10は、図8のX−X線断面図である。図9及び図10に示すように、ジョー42は、シース5に取付けられるジョー本体91を備える。ジョー本体91は、導電材料から形成されている。ジョー本体91には、接続ピン92を介して第2の電極部93が連結されている。シース5の内側パイプ77からジョー42に伝達された高周波電流は、ジョー本体91を通して第2の電極部93に伝達される。シース5を通して第2の電極部93に高周波電流が伝達されることにより、第2の電極部93は第1の電位E1とは大きさの異なる第2の電位E2を有する。
第2の電極部93には、絶縁材料から形成される絶縁当接部材であるパッド部材95が取付けられている。パッド部材95は、ジョー42の開閉方向に垂直なジョー垂直対向面(当接部)97を備える。また、長手軸Cに垂直、かつ、ジョー42の開閉方向に垂直な方向である幅方向について、ジョー垂直対向面97の両側には、第2の電極部93によりジョー傾斜対向面98A,98Bが形成されている。長手軸Cに垂直な断面において、ジョー傾斜対向面98A,98Bは、ジョー垂直対向面97に対して傾斜している。
図10に示すように、第1の電極部23は、ジョー42の開閉方向に垂直なプローブ垂直対向面102を備える。プローブ垂直対向面102は、ジョー垂直対向面97に平行であり、ジョー垂直対向面97と対向している。第1の電極部23とジョー42との間に血管(生体組織)等の把持対象がない状態でジョー42を第1の電極部23に対して閉じた場合、ジョー垂直対向面97は第1の電極部23のプローブ垂直対向面102に当接する。
また、長手軸Cに垂直、かつ、ジョー42の開閉方向に垂直な方向である幅方向について、プローブ垂直対向面102の両側には、第1の電極部23によりプローブ傾斜対向面103A,103Bが形成されている。プローブ傾斜対向面103Aはジョー傾斜対向面98Aに平行であり、プローブ傾斜対向面103Bはジョー傾斜対向面98Bに平行である。ジョー42を第1の電極部23に対して閉じた状態において、プローブ傾斜対向面103Aとジョー傾斜対向面98Aとの間、及び、プローブ傾斜対向面103Bとジョー傾斜対向面98Bとの間には、常にクリアランスが形成されている。すなわち、ジョー垂直対向面97(パッド部材95)が第1の電極部23(プローブ垂直対向面102)と当接した状態において、第2の電極部93は第1の電極部23との間にクリアランスを有する。
図11は、図4の11−11線断面図である。図4及び図11に示すように、第1の可動ハンドル33及び第2の可動ハンドル35は、支点ピン111を介して筒状ケース31に取付けられている。第1の可動ハンドル33及び第2の可動ハンドル35は、支点ピン111を中心として筒状ケース31に対して回動する。すなわち、第1の可動ハンドル33及び第2の可動ハンドル35は、同一の回動軸R0を有する。
図12Aは図4の12A−12A線断面図であり、図12Bは図4の12B−12B線断面図である。また、図13Aは第1の可動ハンドル33が最も閉じた状態を示す図であり、図13Bは図13Aを矢印13Bの方向から視た図である。さらに、図13Cは第2の可動ハンドル35が最も閉じた状態を示す図であり、図13Dは図13Cを矢印13Dの方向から視た図である。
図4、図12A及び図12Bに示すように、固定ハンドル32の内部には第1のストッパ部112及び第2のストッパ部113が設けられている。第1のストッパ部112は、第1の可動ハンドル33が当接可能な位置に配置されている。図13A及び図13Bに示すように、第1の可動ハンドル33は第1のストッパ部112に当接するまで、固定ハンドル32に対して閉動作可能である。第1のストッパ部112には、第2の可動ハンドル35は当接しない。また、第2のストッパ部113は、第2の可動ハンドル35が当接可能な位置に配置されている。図13C及び図13Dに示すように、第2の可動ハンドル35は第2のストッパ部113に当接するまで、固定ハンドル32に対して閉動作可能である。第2のストッパ部113には、第1の可動ハンドル33は当接しない。
図13A及び図13Bに示すように、第1の可動ハンドル33は、固定ハンドル32に対して閉動作を行う際に、第2の可動ハンドル35を固定ハンドル32に向かって押圧する押圧部115を備える。このため、第1の可動ハンドル33が固定ハンドル32に対して閉動作を行う際には、第2の可動ハンドル35も第1の可動ハンドル33と一体に閉動作を行う。すなわち、ジョー42の閉操作が術者によって第1の可動ハンドル33で行われることにより、第1の可動ハンドル33が第1のストッパ部112に当接するまで、第1の可動ハンドル33及び第2の可動ハンドル35が一体に閉動作を行う。また、図13C及び図13Dに示すように、ジョー42の閉操作が術者によって第2の可動ハンドル35で行われた際には、第1の可動ハンドル33は閉動作を行わない。したがって。第2の可動ハンドルで閉操作が行われることにより、第2の可動ハンドル35が第2のストッパ部113に当接するまで、第2の可動ハンドル35は第1の可動ハンドル33から独立して閉動作を行う。
図11に示すように、第2の可動ハンドル35は、アーム部117A,117Bを備える。アーム部117Aには内周方向に向かって突出する係合突起118Aが、アーム部117Bには内周方向に向かって突出する係合突起118Bが設けられている。
図4及び図11に示すように、可動筒状部材46の外周方向側には、スライダー部120が配設されている。スライダー部120には、内周方向に向かって凹む係合溝121が長手軸回り方向に沿って形成されている。係合溝121に係合突起118A,118Bが係合することにより、第2の可動ハンドル35がスライダー部120に取付けられる。スライダー部120は、可動筒状部材46(シース5)と一体に第2の可動ハンドル35及び筒状ケース31に対して長手軸回り方向に回転可能である。スライダー部120は、絶縁材料から形成されている。したがって、可動筒状部材46(シース5)と第2の可動ハンドル35との間が電気的に絶縁されている。
また、可動筒状部材46の外周方向側には、弾性部材ユニット125が設けられている。弾性部材ユニット125は、弾性部材であるコイルバネ126を備える。コイルバネ126により、可動筒状部材46(可動部)とスライダー部120との間が接続される。ジョー42が把持対象に接触していない非接触状態では、自然状態から収縮量x0だけ収縮した基準状態で、可動筒状部材46とスライダー部120との間にコイルバネ126が取付けられている。このため、ジョー42が把持対象に接触していない非接触状態では、コイルバネ126の弾性係数をk0として、コイルバネ126から可動部(可動筒状部材46及び内側パイプ77)に弾性力k0x0が作用している。また、スライダー部120より基端方向側には、ストッパ127が設けられている。ストッパ127により、スライダー部120の基端方向への移動が規制されている。
次に、本実施形態の把持処置装置1の作用について説明する。ここで、図14Aは、第1の処置モードでのジョー42の閉操作による第1の可動ハンドル33の移動量の経時的な変化、及び、第2の処置モードでのジョー42の閉操作による第2の可動ハンドル35の移動量の経時的な変化を示す図である。また、図14Bは、第1の処置モードでのジョー42の閉操作によるコイルバネ126の収縮量の経時的な変化、及び、第2の処置モードでのジョー42の閉操作によるコイルバネ126の収縮量の経時的な変化を示す図である。図14A及び図14Bでは、第1の処置モードでの経時的な変化を実線で、第2の処置モードでの経時的な変化を破線で示す。なお、図14A及び図14Bでは、横軸を時間Tとしているが、この時間Tは、第1の可動ハンドル33又は第2の可動ハンドル35を閉動作させている過程の時間を示している。
第1の処置モードにおいて第1の電極部23とジョー42との間で把持対象を把持する際には、第1の可動ハンドル33でジョー42の閉操作が行われ、固定ハンドル32に対して第1の可動ハンドル33が閉動作を行う。この際、第2の可動ハンドル35も第1の可動ハンドル33と一体に閉動作を行う。これにより、回動軸R0を中心として第1の可動ハンドル33及び第2の可動ハンドル35が回動し、スライダー部120及び可動部(可動筒状部材46及び内側パイプ77)が一体に、長手軸Cに沿って先端方向に向かって移動する。この際、図14A及び図14Bに示すように、時間T0を経過するまではジョー42が把持対象に接触していない非接触状態であるため、コイルバネ126は基準状態から収縮しない。したがって、コイルバネ126から可動筒状部材46及び内側パイプ77に作用する弾性力はk0x0から変化しない。可動筒状部材46及び内側パイプ77が先端方向に移動することにより、第1の電極部23に対してジョー42が閉動作を行う。
そして、時間T0が経過すると、ジョー42が生体組織等の把持対象に接触する接触状態になる。この際、第1の可動ハンドル33は移動量Y0だけ移動している。ジョー42が把持対象に接触することにより、ジョー42の閉動作が一時的に停止する。このため、可動筒状部材46及び内側パイプ77の先端方向への移動が一時的に停止する。接触状態において第1の可動ハンドル33及び第2の可動ハンドル35を固定ハンドル32に対してさらに閉動作させた際には、スライダー部120が可動筒状部材46(可動部)に対して先端方向に移動する。
スライダー部120の可動筒状部材46に対する移動により、コイルバネ126が基準状態からさらに収縮する。基準状態からのコイルバネ126の収縮量をxとすると、コイルバネ126が基準状態からさらに収縮した際にコイルバネ126から可動筒状部材46及び内側パイプ77に作用する弾性力は、k0(x0+x)となり、基準状態での弾性力k0x0より大きくなる。基準状態での弾性力k0x0より大きい弾性力k0(x0+x)がコイルバネ126から可動筒状部材46(可動部)に作用することにより、一時的に停止した可動筒状部材46及び内側パイプ77がさらに先端方向に移動する。これにより、把持対象に接触したジョー42が、第1の電極部23に対してさらに閉動作を行う。したがって、コイルバネ126が基準状態の場合と比較して、ジョー42と第1の電極部23との間で把持対象を把持する把持力が増加する。
以上のように、ジョー42が把持対象に接触する接触状態では、第1の可動ハンドル33での開閉操作によってスライダー部120が可動部(可動筒状部材46及び内側パイプ77)に対して長手軸Cに沿って移動する。これにより、弾性部材であるコイルバネ126の収縮量が変化し、コイルバネ126の収縮量の変化によってコイルバネ126から可動筒状部材46(可動部)に作用する弾性力が変化する。したがって、弾性部材ユニット125により、第1の電極部23とジョー42との間の把持力が変化する。
そして、時間T1が経過すると、第1の可動ハンドル33は、移動量Y1だけ移動する。移動量Y1だけ移動した状態で第1の可動ハンドル33が第1のストッパ部112に当接し、第1の可動ハンドル33及び第2の可動ハンドル35の閉動作が停止する。この際、コイルバネ126は、第1の収縮量x1だけ基準状態から収縮している。このため、コイルバネ126(弾性部材ユニット125)から可動部(可動筒状部材46及び内側パイプ77)に第1の弾性力k0(x0+x1)が作用する。これにより、第1の電極部23とジョー42との間では、第1の把持力F1で把持対象が把持される。
第1の処置モードでは、第1の電極部23とジョー42との間で把持対象が第1の把持力F1で把持された状態で、術者が第1の処置モード入力部である第1の処置モード入力ボタン57Aを押圧する。これにより、第1のスイッチ部58Aが閉状態になり、第1のスイッチ部58Aで第1の電気信号経路P1とグランド経路Gとの間が電気的に接続され、第1の処置モード入力ボタン57A(第1のスイッチ部58A)から電源ユニット7の制御部10に電気信号が伝達される。そして、超音波発生電流供給部8から超音波発生電流が出力されるとともに、高周波電流供給部9から高周波電流が出力される。
超音波発生電流供給部8から電気信号線13A,13Bを介して超音波振動子12に電流が供給されることにより、超音波振動子12で超音波振動が発生する。そして、第1の電極部23まで超音波振動が伝達される。プローブ3の超音波振動によって発生する摩擦熱により、第1の電極部23とジョー42との間で把持された把持対象が凝固切開される。
また、高周波電流供給部9から出力された高周波電流は、電気信号線17、超音波振動子12、ホーン15、プローブ3を通して、第1の電極部23に伝達される。高周波電流が伝達されることにより、第1の電極部23は、第1の電位E1を有する。また、高周波電流供給部9から、電気信号線69、第4の導電部63D、可動筒状部材46、内側パイプ77及びジョー42を通して、第2の電極部93に高周波電流が伝達される。高周波電流が伝達されることにより、第2の電極部93は第1の電位E1とは大きさの異なる第2の電位E2を有する。第1の電極部23が第1の電位E1を有し、第2の電極部93が第2の電位E2を有するため、第1の電極部23とジョー42との間で把持された把持対象に高周波電流が流れる。これにより、生体組織等の把持対象が変成され、凝固が促進される。
第1の処置モードでは、ジョー42と第1の電極部23との間で把持対象を把持した状態から第1の可動ハンドル33でジョー42の開操作を行うことにより、第1の可動ハンドル33及び第2の可動ハンドル35が固定ハンドル32に対して開動作を行う。この際、スライダー部120が可動筒状部材46(可動部)に対して基端方向に移動する。これにより、コイルバネ126が伸長し基準状態になる。そして、スライダー部120及び可動部(可動筒状部材46及び内側パイプ77)が一体に、長手軸Cに沿って基端方向に向かって移動する。可動筒状部材46及び内側パイプ77が基端方向に移動することにより、第1の電極部23に対してジョー42が開動作を行う。
第2の処置モードにおいて第1の電極部23とジョー42との間で把持対象を把持する際には、第2の可動ハンドル35でジョー42の閉操作が行われ、固定ハンドル32に対して第2の可動ハンドル35が閉動作を行う。この際、第1の可動ハンドル33は閉動作を行わず、第2の可動ハンドル35が第1の可動ハンドル33から独立して閉動作を行う。これにより、回動軸R0を中心として第2の可動ハンドル35が回動し、スライダー部120及び可動部(可動筒状部材46及び内側パイプ77)が一体に、長手軸Cに沿って先端方向に向かって移動する。
この際、図14A及び図14Bに示すように、時間T1が経過するまでは、第2の可動ハンドル35の移動量の経時的な変化は、第1の処置モードでの第1の可動ハンドル33の経時的な変化と同様である。したがって、時間T1が経過するまでは、コイルバネ126の収縮量の経時的な変化は第1の処置モードと同様である。すなわち、ジョー42が把持対象に接触する接触状態では、第2の可動ハンドル35での開閉操作によってスライダー部120が可動部(可動筒状部材46及び内側パイプ77)に対して長手軸Cに沿って移動する。これにより、弾性部材であるコイルバネ126の収縮量が変化し、コイルバネ126の収縮量の変化によってコイルバネ126から可動筒状部材46(可動部)に作用する弾性力が変化する。したがって、弾性部材ユニット125により、第1の電極部23とジョー42との間の把持力が変化する。
しかし、第2の可動ハンドル35でジョー42の閉操作が行われた際には、時間T1が経過した後も、第2の可動ハンドル35は移動量Y1だけ移動した状態からさらに閉動作を行う。このため、コイルバネ126は基準状態から第1の収縮量x1だけ収縮した状態から、さらに収縮する。
そして、時間T1より長い時間T2が経過すると、第2の可動ハンドル35は、移動量Y2だけ移動する。移動量Y2だけ移動した状態で、第2の可動ハンドル35が第2のストッパ部113に当接し、第2の可動ハンドル35の閉動作が停止する。この際、コイルバネ126は、第1の収縮量x1より大きい第2の収縮量x2だけ基準状態から収縮している。このため、コイルバネ126(弾性部材ユニット125)から可動部(可動筒状部材46及び内側パイプ77)に第1の弾性力k0(x0+x1)より大きい第2の弾性力k0(x0+x2)が作用する。第2の処置モードでは、第1の弾性力k0(x0+x1)より大きい第2の弾性力k0(x0+x2)が可動部に作用するため、第1の処置モードよりジョー42が第1の電極部23に対してさらに閉じた状態で、把持対象が把持される。したがって、第2の処置モードでは、第1の電極部23とジョー42との間で、第1の把持力F1より大きい第2の把持力F2で把持対象が把持される。
第2の処置モードでは、第1の電極部23とジョー42との間で把持対象が第2の把持力F2で把持された状態で、術者は第2の処置モード入力部である第2の処置モード入力ボタン57Bを押圧する。これにより、第2のスイッチ部58Bが閉状態になり、第2のスイッチ部58Bで第2の電気信号経路P2とグランド経路Gとの間が電気的に接続され、第2のスイッチ部58Bから電源ユニット7の制御部10に電気信号が伝達される。そして、高周波電流供給部9から高周波電流が出力される。この際、超音波発生電流供給部8から電流は出力されない。
高周波電流供給部9から出力された高周波電流は、電気信号線17、超音波振動子12、ホーン15、プローブ3を通して、第1の電極部23に伝達される。高周波電流が伝達されることにより、第1の電極部23は第1の電位E1を有する。また、高周波電流供給部9から、電気信号線69、第4の導電部63D、可動筒状部材46、内側パイプ77及びジョー42を通して、第2の電極部93に高周波電流が伝達される。高周波電流が伝達されることにより、第2の電極部93は第1の電位E1とは大きさの異なる第2の電位E2を有する。第2の処置モードでは、第1の電極部23及び第2の電極部93に高周波電流のみが伝達される。第1の電極部23が第1の電位E1を有し、第2の電極部93が第2の電位E2を有するため、第1の電極部23とジョー42の間で把持された把持対象に高周波電流が流れる。これにより、生体組織等の把持対象が変成され、凝固が行われる。
第2の処置モードでは、第1の処置モードでの第1の把持力F1より大きい第2の把持力F2で、第1の電極部23とジョー42との間で把持対象が把持される。このため、第2の処置モードでは第1の処置モードに比べ、高周波電流による生体組織(把持対象)の変成が促進される。したがって、高周波電流による把持対象の凝固性能が向上するため、超音波振動を用いない第2の処置モードにおいても、把持対象の凝固性能の低下が防止される。これにより、超音波振動を用いない第2の処置モードにおいても、安定して把持対象(生体組織)が封止される。
以上のように、本実施形態では、固定ハンドル32、第1の可動ハンドル33及び第2の可動ハンドル35が、第1の処置モードでのコイルバネ(弾性部材)126の第1の収縮量x1より、第2の処置モードでのコイルバネ(弾性部材)126の第2の収縮量x2を大きくする収縮量変換部となっている。このため、固定ハンドル32、第1の可動ハンドル33及び第2の可動ハンドル35が、第1の処置モードで弾性部材ユニット125から可動部(可動筒状部材46及び内側パイプ77)に作用する第1の弾性力k0(x0+x1)より、第2の処置モードで弾性部材ユニット125から可動部(46,77)に作用する第2の弾性力k0(x0+x2)を大きくする弾性力変換部となる。したがって、固定ハンドル32、第1の可動ハンドル33及び第2の可動ハンドル35が、第1の処置モードでの第1の電極部23とジョー42との間の第1の把持力F1より、第2の処置モードでの第1の電極部23とジョー42との間の第2の把持力F2を大きくする把持力変換ユニットとなる。
そこで、前記構成の把持処置装置1では、以下の効果を奏する。すなわち、把持処置装置1では、第1の処置モードでのコイルバネ(弾性部材)126の第1の収縮量x1より、第2の処置モードでのコイルバネ(弾性部材)126の第2の収縮量x2が大きくなる。このため、第1の処置モードで弾性部材ユニット125から可動部(可動筒状部材46及び内側パイプ77)に作用する第1の弾性力k0(x0+x1)より、第2の処置モードで弾性部材ユニット125から可動部(46,77)に作用する第2の弾性力k0(x0+x2)が大きくなる。したがって、第2の処置モードでは、第1の処置モードでの第1の把持力F1より大きい第2の把持力F2で、第1の電極部23とジョー42との間で把持対象が把持される。このため、第2の処置モードでは第1の処置モードに比べ、高周波電流による生体組織(把持対象)の変成が促進される。したがって、高周波電流による把持対象の凝固性能が向上するため、超音波振動を用いない第2の処置モードにおいても、把持対象の凝固性能の低下を防止することができる。これにより、超音波振動を用いない第2の処置モードにおいても、安定して把持対象(生体組織)を封止することができる。
(第1の実施形態の変形例)
なお、第1の実施形態では、第1の可動ハンドル33及び第2の可動ハンドル35が同一の回動軸R0を有するが、これに限るものではない。例えば、変形例として図15及び図16に示すように、第1の可動ハンドル33が支点ピン131を介して筒状ケース31に取付けられ、第2の可動ハンドル35が支点ピン132を介して筒状ケース31に取り付けられてもよい。この場合、第1の可動ハンドル33は第1の回動軸R1を有し、第2の可動ハンドル35は第1の回動軸R1とは異なる第2の回動軸R2を有する。第2の可動ハンドル35は、第1の実施形態と同様に、係合突起118A,118Bを備える。本変形例では、第1の可動ハンドル33に、アーム部133A,133Bが設けられている。アーム部133Aには内周方向に向かって突出する係合突起135Aが、アーム部133Bには内周方向に向かって突出する係合突起135Bが設けられている。
本変形例では、スライダー部120は、第1のスライダー136と、第1のスライダー136より先端方向側に設けられる第2のスライダー137と、を備える。第1のスライダー136には、内周方向に向かって凹む係合溝141が長手軸回り方向に沿って形成されている。また、第2のスライダー137には、内周方向に向かって凹む係合溝142が長手軸回り方向に沿って形成されている。係合溝141に係合突起135A,135Bが係合することにより、第1の可動ハンドル33が第1のスライダー136(スライダー部120)に取付けられる。また、係合溝142に係合突起118A,118Bが係合することにより、第2の可動ハンドル35が第2のスライダー137(スライダー部120)に取付けられる。
第1のスライダー136及び第2のスライダー137は、可動筒状部材46(シース5)と一体に第1の可動ハンドル33、第2の可動ハンドル35及び筒状ケース31に対して長手軸回り方向に回転可能である。また、第1のスライダー136及び第2のスライダー137は、絶縁材料から形成されている。したがって、可動筒状部材46(シース5)と第1の可動ハンドル33及び第2の可動ハンドル35との間が電気的に絶縁されている。
第2のスライダー137には、弾性部材ユニット125のコイルバネ126の一端が接続されている。また、第1のスライダー136には、第1のスライダー136が可動筒状部材46に対して先端方向に移動する際に第2のスライダー137を先端方向に押圧する押圧部139が、設けられている。
第1の処置モードにおいて第1の電極部23とジョー42との間で把持対象を把持する際には、第1の可動ハンドル33でジョー42の閉操作が行われ、固定ハンドル32に対して第1の可動ハンドル33が閉動作を行う。この際、第1のスライダー136の押圧部139が第2のスライダー137を先端方向に押圧することにより、第2の可動ハンドル35は第1の可動ハンドル33と同一の方向に移動する。そして、時間T0が経過すると、ジョー42が把持対象に接触する接触状態となり、第1のスライダー136が可動筒状部材46に対して移動する。この際、第1のスライダー136の押圧部139が第2のスライダー137を先端方向に押圧することにより、第2のスライダー137が第1のスライダー136と一体に可動筒状部材46(可動部)に対して移動する。第2のスライダー137が移動することにより、コイルバネ126が基準状態から収縮する。
そして、第1の実施形態と同様に、時間T1が経過すると第1の可動ハンドル33は、移動量Y1だけ移動する。移動量Y1だけ移動した状態で第1の可動ハンドル33が第1のストッパ部112に当接し、第1の可動ハンドル33の閉動作が停止する。この際、コイルバネ126は、第1の収縮量x1だけ基準状態から収縮している。このため、コイルバネ126(弾性部材ユニット125)から可動部(可動筒状部材46及び内側パイプ77)に第1の弾性力k0(x0+x1)が作用する。これにより、第1の電極部23とジョー42との間では、第1の把持力F1で把持対象が把持される。
第2の処置モードにおいて第1の電極部23とジョー42との間で把持対象を把持する際には、第2の可動ハンドル35でジョー42の閉操作が行われ、固定ハンドル32に対して第2の可動ハンドル35が閉動作を行う。この際、第1の可動ハンドル33は、閉動作を行わない。そして、時間T0が経過すると、ジョー42が把持対象に接触する接触状態となり、第2のスライダー137が第1のスライダー136から独立して可動筒状部材46に対して移動する。これにより、コイルバネ126が基準状態から収縮する。この際第1のスライダー136は、移動しない。
そして、第1の実施形態と同様に、時間T1より長い時間T2が経過すると第2の可動ハンドル35は、移動量Y1より大きい移動量Y2だけ移動する。移動量Y2だけ移動した状態で第2の可動ハンドル35が第2のストッパ部113に当接し、第2の可動ハンドル35の閉動作が停止する。この際、コイルバネ126は、第1の収縮量x1より大きい第2の収縮量x2だけ基準状態から収縮している。このため、コイルバネ126(弾性部材ユニット125)から可動部(可動筒状部材46及び内側パイプ77)に第1の弾性力k0(x0+x1)より大きい第2の弾性力k0(x0+x2)が作用する。第2の処置モードでは、第1の弾性力k0(x0+x1)より大きい第2の弾性力k0(x0+x2)が可動部に作用するため、第1の処置モードよりジョー42が第1の電極部23に対してさらに閉じた状態で、把持対象が把持される。したがって、第2の処置モードでは、第1の電極部23とジョー42との間で、第1の把持力F1より大きい第2の把持力F2で把持対象が把持される。
以上のように、本変形例においても、第1の実施形態と同様に、固定ハンドル32、第1の可動ハンドル33及び第2の可動ハンドル35が、第1の処置モードでのコイルバネ(弾性部材)126の第1の収縮量x1より、第2の処置モードでのコイルバネ(弾性部材)126の第2の収縮量x2を大きくする収縮量変換部となっている。このため、固定ハンドル32、第1の可動ハンドル33及び第2の可動ハンドル35が、第1の処置モードで弾性部材ユニット125から可動部(可動筒状部材46及び内側パイプ77)に作用する第1の弾性力k0(x0+x1)より、第2の処置モードで弾性部材ユニット125から可動部(46,77)に作用する第2の弾性力k0(x0+x2)を大きくする弾性力変換部となる。したがって、固定ハンドル32、第1の可動ハンドル33及び第2の可動ハンドル35が、第1の処置モードでの第1の電極部23とジョー42との間の第1の把持力F1より、第2の処置モードでの第1の電極部23とジョー42との間の第2の把持力F2を大きくする把持力変換ユニットとなる。
また、本変形例では、第1の処置モードでのジョー42の開閉操作において術者から力が印加される第1の可動ハンドル33の第1の力点Q1と第1の可動ハンドル33の支点である第1の回動軸R1との間の寸法をL1とし、第1の回動軸R1と作用点である係合突起135A,135Bとの間の寸法をL´1とすると、第1の可動ハンドル33の杆比(leverage)はL1/L´1となる。また、第2の処置モードでのジョー42の開閉操作において術者から力が印加される第2の可動ハンドル35の第2の力点Q2と第2の可動ハンドル35の支点である第2の回動軸R2との間の寸法をL2とし、第2の回動軸R2と作用点である係合突起118A,118Bとの間の寸法をL´2とすると、第2の可動ハンドル35の杆比はL2/L´2となる。
ここで、第1の実施形態では、第1の処置モード及び第2の処置モードの両方において、第2の可動ハンドル35の支点は回動軸R0であり、第2の可動ハンドル35の作用点は係合突起118A,118Bである。そして、第1の処置モードと第2の処置モードとでは、ジョー42の開閉操作において術者から力が印加される力点が異なる。このため、第1の実施形態では、第1の処置モードと第2の処置モードとの間で、第2の可動ハンドル35の杆比が異なる。このため、第1の処置モード及びと第2の処置モードで同一の大きさの力を印加して術者が開閉操作を行った場合でも、第1の処置モードと第2の処置モードとでスライダー部120の移動量が異なる。したがって、第1の処置モードと第2の処置モードとで、術者が開閉操作で印加した力に対するコイルバネ126の収縮量の比が異なってしまう。これにより、ジョー42の開閉操作の操作性が低下してしまう可能性がある。
これに対し、本変形例では、寸法L1,L2,L´1,L´2を調整することにより、第1の可動ハンドル33の杆比L1/L´1と第2の可動ハンドル35の杆比L2/L´2とを調節できる。このため、第2の可動ハンドル35に大きい力を印加することなく、ジョー42と第1の電極部23との間での把持力を大きくすることが可能となる。すなわち、杆比を調整することにより、把持力が大きい第2の処置モードにおいても、ジョーの操作性が確保される。
(第2の実施形態)
次に、本発明の第2の実施形態について、図17乃至図21を参照して説明する。第2の実施形態は、第1の実施形態の構成を次の通り変形したものである。なお、第1の実施形態と同一の部分については同一の符号を付して、その説明は省略する。
図17及び図18は、本実施形態の把持処置装置1のハンドルユニット4の構成を示す図である。図17が第1の処置モードを示し、図18は第2の処置モードを示している。図17及び図18に示すように、本実施形態のハンドルユニット4は、第1の実施形態と同様に、筒状ケース31、固定ハンドル32及びスイッチ配置部55を備える。ただし、本実施形態では、固定ハンドル32に対して開閉可能な可動ハンドル145が1つのみ設けられている。可動ハンドル145は、固定ハンドル32より基端方向側に位置している。本変形例においても、第1の実施形態と同様に、可動ハンドル145は固定ハンドル32に対して長手軸Cと略平行に開閉可能である。可動ハンドル145は、第1の実施形態の第2の可動ハンドル35と同様の態様で、スライダー部120に取付けられている。
固定ハンドル32には、移動部材146が取付けられている。移動部材146は、第1の移動位置(図17参照)と第2の移動位置(図18参照)との間で移動可能である。移動部材146の移動は、部材位置切替え部である部材位置切替えレバー147での切替え操作により行われる。移動部材146は、ストッパ部148と、固定側ラチェット149と、を備える。また、可動ハンドル145には、固定ハンドル32に向かって突出する突起部151が設けられている。突起部151には、可動側ラチェット152が形成されている。
第1の処置モードでは、部材位置切替えレバー147での切替え操作により、第1の移動位置へ移動部材146を移動させる。第1の電極部23とジョー42との間で把持対象を把持する際には、可動ハンドル145でジョー42の閉操作が行われ、固定ハンドル32に対して可動ハンドル145が閉動作を行う。そして、可動ハンドル145の閉動作に対応して、ハンドルユニット4及びプローブ3に対してシース5の可動部(可動筒状部材46及び内側パイプ77)が長手軸Cに沿って先端方向に移動する。内側パイプ77が移動することにより、ジョー42が第1の電極部23に対して閉動作を行う。そして、第1の実施形態と同様に、時間T0が経過すると、ジョー42が把持対象に接触する接触状態となり、スライダー部120が可動筒状部材46に対して移動する。スライダー部120が移動することにより、コイルバネ126が基準状態から収縮する。
第1の実施形態と同様に、時間T1が経過すると可動ハンドル145は、移動量Y1だけ移動する。移動部材146が第1の移動位置に位置する状態では、可動ハンドル145が移動量Y1だけ移動することにより、可動ハンドル145の突起部151が移動部材146のストッパ部148に当接する。これにより、可動ハンドル145の閉動作が停止する。この際、コイルバネ126は、第1の収縮量x1だけ基準状態から収縮している。このため、コイルバネ126(弾性部材ユニット125)から可動部(可動筒状部材46及び内側パイプ77)に第1の弾性力k0(x0+x1)が作用する。これにより、第1の電極部23とジョー42との間では、第1の把持力F1で把持対象が把持される。
第2の処置モードでは、部材位置切替えレバー147での切替え操作により、第2の移動位置へ移動部材146を移動させる。第1の電極部23とジョー42との間で把持対象を把持する際には、第1の処置モードと同様に、可動ハンドル145でジョー42の閉操作が行われ、固定ハンドル32に対して可動ハンドル145が閉動作を行う。そして、時間T0が経過すると、ジョー42が把持対象に接触する接触状態となり、スライダー部120が可動筒状部材46に対して移動する。これにより、コイルバネ126が基準状態から収縮する。
移動部材146が第2の移動位置に位置する状態では、移動量Y1だけ可動ハンドル145が移動しても、可動ハンドル145の突起部151は移動部材146のストッパ部148に当接しない。また、移動部材146が第2の移動位置に位置する状態では、突起部151の可動側ラチェット152が、移動部材146の固定側ラチェット149に噛合っている。第2の処置モードでは、可動側ラチェット152が固定側ラチェット149に噛合った状態で、可動ハンドル145は閉動作を行う。すなわち、固定側ラチェット149は、第2の処置モードにおいて可動ハンドル145の閉動作をガイドするガイド部となっている。
そして、固定側ラチェット149によって可動ハンドル145の閉動作がガイドされることにより、第1の実施形態と同様に、時間T1より長い時間T2が経過すると可動ハンドル145は、移動量Y1より大きい移動量Y2だけ移動する。この際、コイルバネ126は、第1の収縮量x1より大きい第2の収縮量x2だけ基準状態から収縮している。このため、コイルバネ126(弾性部材ユニット125)から可動部(可動筒状部材46及び内側パイプ77)に第1の弾性力k0(x0+x1)より大きい第2の弾性力k0(x0+x2)が作用する。第2の処置モードでは、第1の弾性力k0(x0+x1)より大きい第2の弾性力k0(x0+x2)が可動部に作用するため、第1の処置モードよりジョー42が第1の電極部23に対してさらに閉じた状態で、把持対象が把持される。したがって、第2の処置モードでは、第1の電極部23とジョー42との間で、第1の把持力F1より大きい第2の把持力F2で把持対象が把持される。
以上のように、本実施形態では、部材位置切替えレバー147が、第1の処置モードでのコイルバネ(弾性部材)126の第1の収縮量x1より、第2の処置モードでのコイルバネ(弾性部材)126の第2の収縮量x2を大きくする収縮量変換部となっている。このため、部材位置切替えレバー147が、第1の処置モードで弾性部材ユニット125から可動部(可動筒状部材46及び内側パイプ77)に作用する第1の弾性力k0(x0+x1)より、第2の処置モードで弾性部材ユニット125から可動部(46,77)に作用する第2の弾性力k0(x0+x2)を大きくする弾性力変換部となる。したがって、部材位置切替えレバー147が、第1の処置モードでの第1の電極部23とジョー42との間の第1の把持力F1より、第2の処置モードでの第1の電極部23とジョー42との間の第2の把持力F2を大きくする把持力変換ユニットとなる。
また、図17及び図18に示すように、移動部材146には、柱状の絶縁部材153が取付けられている。絶縁部材153は、部材位置切替えレバー147での切替え操作により、移動部材146と一体に移動する。移動部材146が第1の移動位置に位置する状態では、絶縁部材153は電気回路基板59から離れて位置している(図17参照)。移動部材146が第2の移動位置に位置する状態では、絶縁部材153は電気回路基板59に接触している(図18参照)。
図19は、本実施形態の第1のスイッチ部58A及び第2のスイッチ部58Bと制御部10との間の電気接続状態を示す回路図である。図19に示すように、本実施形態では、第1のスイッチ部58A及び第2のスイッチ部58Bに加えて、第1の電気信号経路P1に第3のスイッチ部155が設けられている。第3のスイッチ部155は、電気回路基板59上に位置している。
図20及び図21は、第3のスイッチ部155の構成を示す図である。図20は第1の処置モードを示し、図21は第2の処置モードを示している。図20及び図21に示すように、第3のスイッチ部155は、第1の電気接触部156と、第2の電気接触部157と、を備える。第1の電気接触部156及び第2の電気接触部157は、互いに対して接触する状態に、付勢されている。
図20に示すように、第1の処置モードでは、絶縁部材153が電気回路基板59から離れて位置する。このため、第1の電気接触部156及び第2の電気接触部157は、付勢により接触している。したがって、第3のスイッチ部155は、閉状態となる。このため、術者が第1の処置モード入力部である第1の処置モード入力ボタン57Aを押圧することにより、第1のスイッチ部58Aが閉状態になる。これにより、第1のスイッチ部58Aで第1の電気信号経路P1とグランド経路Gとの間が電気的に接続され、第1の処置モード入力ボタン57A(第1のスイッチ部58A)から電源ユニット7の制御部10に電気信号が伝達される。
図21に示すように、第2の処置モードでは、絶縁部材153が電気回路基板59に接触している。このため、第1の電気接触部156と第2の電気接触部157との間に絶縁部材153が挿入され、第1の電気接触部156と第2の電気接触部157との間が絶縁される。したがって、第3のスイッチ部155は開状態となり、第1の処置モード入力ボタン57A(第1のスイッチ部58A)と電源ユニット7の制御部10との間の電気接続が遮断される。このため、術者が第1の処置モード入力部である第1の処置モード入力ボタン57Aを押圧し、第1のスイッチ部58Aが閉状態になった場合も、第1の処置モード入力ボタン57A(第1のスイッチ部58A)から電源ユニット7の制御部10に電気信号が伝達されない。したがって、第2の処置モードでの処置において術者が誤って第1の処置モード入力ボタン57Aを押圧した場合でも、超音波発生電流供給部8から超音波発生電流が出力されない。
以上のように、第2の処置モードでは、絶縁部材153により、第3のスイッチ部155が開状態となる。すなわち、絶縁部材153は、第2の処置モードにおいて、第1の処置モードへの入力操作の有無に関係なく第1の処置モード入力ボタン57Aから制御部10へ電気信号が伝達されない状態に、第1の処置モード入力ボタン57Aと制御部10との間の電気接続を遮断する電気接続遮断部となっている。
そこで、前記構成の把持処置装置1では、以下の効果を奏する。すなわち、把持処置装置1では、第1の処置モードでのコイルバネ(弾性部材)126の第1の収縮量x1より、第2の処置モードでのコイルバネ(弾性部材)126の第2の収縮量x2が大きくなる。このため、第1の処置モードで弾性部材ユニット125から可動部(可動筒状部材46及び内側パイプ77)に作用する第1の弾性力k0(x0+x1)より、第2の処置モードで弾性部材ユニット125から可動部(46,77)に作用する第2の弾性力k0(x0+x2)が大きくなる。したがって、第2の処置モードでは、第1の処置モードでの第1の把持力F1より大きい第2の把持力F2で、第1の電極部23とジョー42との間で把持対象が把持される。このため、第2の処置モードでは第1の処置モードに比べ、高周波電流による生体組織(把持対象)の変成が促進される。したがって、高周波電流による把持対象の凝固性能が向上するため、超音波振動を用いない第2の処置モードにおいても、把持対象の凝固性能の低下を防止することができる。これにより、超音波振動を用いない第2の処置モードにおいても、安定して把持対象(生体組織)を封止することができる。
(第2の実施形態の変形例)
なお、第2の処置モードにおいて第1の処置モード入力ボタン57Aと制御部10との間の電気接続を遮断する構成は、第2の実施形態に限るものではない。また、例えば第1の実施形態の把持処置装置1に、第2の処置モードにおいて第1の処置モード入力ボタン57Aと制御部10との間の電気接続を遮断する構成を適用してもよい。すなわち、第2の処置モードにおいて、第1の処置モードへの入力操作の有無に関係なく第1の処置モード入力ボタン57Aから制御部10へ電気信号が伝達されない状態に、第1の処置モード入力ボタン57Aと制御部10との間の電気接続を遮断する電気接続遮断部(153)が設けられていればよい。
(第3の実施形態)
次に、本発明の第3の実施形態について、図22及び図23を参照して説明する。第3の実施形態は、前述の実施形態の構成を次の通り変形したものである。なお、前述の実施形態と同一の部分については同一の符号を付して、その説明は省略する。
図22及び図23は、本実施形態のハンドルユニット4とシース5との間の連結構成を示す図である。図22及び図23に示すように、ハンドルユニット4は、第1の実施形態と同様に、第1の可動ハンドル33及び第2の可動ハンドル35を備える。第1の可動ハンドル33及び第2の可動ハンドル35は、支点ピン111を中心として筒状ケース31に対して回動する。すなわち、第1の可動ハンドル33及び第2の可動ハンドル35は、同一の回動軸R0を有する。
第1の可動ハンドル33には、第1の実施形態の変形例と同様に、アーム部133A,133Bが設けられている。そして、アーム部133Aには係合突起135Aが、アーム部133Bには係合突起135Bが設けられている。また、第2の可動ハンドル35には、第1の実施形態と同様に、アーム部117A,117Bが設けられている。そして、アーム部117Aに係合突起118Aが、アーム部117Bには係合突起118Bが設けられている。また、固定ハンドル32には、ストッパ部181が1つのみ設けられている。第1の可動ハンドル33及び第2の可動ハンドル35は、ストッパ部181に当接するまで固定ハンドル32に対して閉動作可能である。
また、シース5には、可動筒状部材46の代わりに、第1の可動筒状部材182及び第2の可動筒状部材183が設けられている。第1の可動筒状部材182には、貫通孔185A,185Bが互いに対して長手軸回り方向に離れた状態で設けられている。それぞれの貫通孔185A,185Bは、長手軸Cに沿って長孔状に形成され、第1の可動筒状部材182を径方向に貫通している。また、第2の可動筒状部材183には、貫通孔186A,186Bが互いに対して長手軸回り方向に離れた状態で設けられている。それぞれの貫通孔186A,186Bは、長手軸Cに沿って長孔状に形成され、第2の可動筒状部材183を径方向に貫通している。
回転操作ノブ37の係合ピン47Aは、貫通孔185A、貫通孔186Aに挿通され、係合凹部49Aに係合している。また、係合ピン47Bは、貫通孔185B、貫通孔186Bに挿通され、係合凹部49Bに係合している。それぞれの係合ピン47A,47Bが対応する貫通孔185A,185Bに挿通されることにより、第1の可動筒状部材182及び回転操作ノブ37が、互いに対して長手軸回り方向に回転不可能な状態に、規制される。また、それぞれの係合ピン47A,47Bが対応する貫通孔186A,186Bに挿通されることにより、第2の可動筒状部材183及び回転操作ノブ37が、互いに対して長手軸回り方向に回転不可能な状態に、規制される。ただし、第1の可動筒状部材182及び第2の可動筒状部材183は、回転操作ノブ37及び接続筒状部材45に対して長手軸Cに沿って移動可能である。以上のような構成にすることにより、第1の可動筒状部材182及び第2の可動筒状部材183は、回転操作ノブ37及び接続筒状部材45と一体に筒状ケース31に対して長手軸回り方向に回転可能となる。また、第1の可動筒状部材182及び第2の可動筒状部材183は、プローブ3及びハンドルユニット4に対して、長手軸Cに沿って移動可能となる。
第1の可動筒状部材182は、導電材料から形成され、振動子ケース11に連結される。振動子ケース11に第1の可動筒状部材182(シース5)が連結された状態では、第1の可動筒状部材182に、振動子ケース11の第4の導電部63Dの先端部が電気的に接触する。このため、高周波電流供給部9とシース5の第1の可動筒状部材182との間で、電気信号線69、第4の導電部63Dを介して、高周波電流が伝達される。
第1の可動筒状部材182及び第2の可動筒状部材183は、接続ピン79を介して、互いに対して固定されている。また、内側パイプ77には、接続部材78及び接続ピン79を介して、第1の可動筒状部材182が固定されている。本実施形態では、内側パイプ77は、第1の可動筒状部材182及び第2の可動筒状部材183と一体にハンドルユニット4及びプローブ3に対して、長手軸Cに沿って移動可能である。ここで、第1の可動筒状部材182、第2の可動筒状部材183及び内側パイプ77が、プローブ3に対して長手軸Cに沿って移動可能な可動部となる。また、内側パイプ77には、接続部材78及び接続ピン79を通して、第1の可動筒状部材182から高周波電流が伝達される。
また、スライダー部120は、第1の可動筒状部材182の外周部に配設される第1のスライダー187と、第2の可動筒状部材183の外周部に配設される第2のスライダー188と、を備える。第1のスライダー187には、内周方向に向かって凹む係合溝191が長手軸回り方向に沿って形成されている。係合溝191に係合突起135A,135Bが係合することにより、第1の可動ハンドル33が第1のスライダー187に取付けられる。第1のスライダー187は、第1の可動筒状部材182(シース5)と一体に第1の可動ハンドル33及び筒状ケース31に対して長手軸回り方向に回転可能である。また、第2のスライダー188には、内周方向に向かって凹む係合溝192が長手軸回り方向に沿って形成されている。係合溝192に係合突起118A,118Bが係合することにより、第2の可動ハンドル35が第2のスライダー188に取付けられる。第2のスライダー188は、第2の可動筒状部材183(シース5)と一体に第2の可動ハンドル35及び筒状ケース31に対して長手軸回り方向に回転可能である。
また、弾性部材ユニット125は、第1の弾性部材である第1のコイルバネ195と、第2の弾性部材である第2のコイルバネ196と、を備える。第1のコイルバネ195を介して第1のスライダー187が第1の可動筒状部材182に接続され、第2のコイルバネ196を介して第2のスライダー188が第2の可動筒状部材183に接続される。
ジョー42が把持対象に接触していない非接触状態では、自然状態から収縮量x0だけ収縮した基準状態で、第1の可動筒状部材182と第1のスライダー187との間に第1のコイルバネ195が取付けられている。また、第1のコイルバネ195は、第1の弾性定数k1を有する。このため、ジョー42が把持対象に接触していない非接触状態では、第1のコイルバネ195から第1の可動筒状部材182(可動部)に弾性力k1x0が作用している。また、第1のスライダー187より基端方向側には、第1のストッパ197が設けられている。第1のストッパ197により、第1のスライダー187の基端方向への移動が規制されている。
また、ジョー42が把持対象に接触していない非接触状態では、自然状態から収縮量x0だけ収縮した基準状態で、第2の可動筒状部材183と第2のスライダー188との間に第2のコイルバネ196が取付けられている。また、第2のコイルバネ196は第1の弾性定数k1より大きい第2の弾性定数k2を有し、第2のコイルバネ196は第1のコイルバネ195とは種類が異なる。このため、ジョー42が把持対象に接触していない非接触状態では、第2のコイルバネ196から第2の可動筒状部材183(可動部)に弾性力k2x0が作用している。また、第2のスライダー188より基端方向側には、第2のストッパ198が設けられている。第2のストッパ198により、第2のスライダー188の基端方向への移動が規制されている。
以上のように、ジョー42が把持対象に接触していない非接触状態では、第1のコイルバネ195から第1の可動筒状部材182(可動部)に弾性力k1x0が作用し、第2のコイルバネ196から第2の可動筒状部材183(可動部)に弾性力k2x0が作用している。したがって、ジョー42が把持対象に接触していない非接触状態では、弾性部材ユニット125から第1の可動筒状部材182及び第2の可動筒状部材183を含む可動部に、弾性力(k1+k2)x0が作用している。
次に、本実施形態の把持処置装置1の作用について説明する。第1の処置モードにおいて第1の電極部23とジョー42との間で把持対象を把持する際には、第1の可動ハンドル33でジョー42の閉操作が行われる。固定ハンドル32に対して第1の可動ハンドル33が閉動作を行うことにより、第1のスライダー187が可動部(第1の可動筒状部材182、第2の可動筒状部材183及び内側パイプ77)及び第2のスライダー188と一体に、長手軸Cに沿って先端方向に向かって移動する。この際、ジョー42が把持対象に接触するまでは、ジョー42が把持対象に接触していない非接触状態であるため、第1のコイルバネ195は基準状態から収縮しない。このため、第1のコイルバネ195から第1の可動筒状部材182に作用する弾性力はk1x0から変化しない。したがって、弾性部材ユニット125から可動部に作用する弾性力は(k1+k2)x0から変化しない。第1の可動筒状部材182、第2の可動筒状部材183及び内側パイプ77が先端方向に移動することにより、第1の電極部23に対してジョー42が閉動作を行う。
そして、ジョー42が把持対象に接触する接触状態になると、第1の可動ハンドル33を固定ハンドル32に対してさらに閉動作させることにより、第1のスライダー187が第1の可動筒状部材182(可動部)に対して先端方向に移動する。これにより、第1のコイルバネ195が基準状態からさらに収縮する。したがって、基準状態での弾性力k1x0より大きい弾性力k1(x0+x´)が第1のコイルバネ195から第1の可動筒状部材182(可動部)に作用し、可動部(第1の可動筒状部材182、第2の可動筒状部材183及び内側パイプ77)がさらに先端方向に移動する。これにより、把持対象に接触したジョー42が第1の電極部23に対してさらに閉動作を行い、ジョー42と第1の電極部23との間で把持対象を把持する把持力が増加する。
そして、第1の可動ハンドル33がストッパ部181に当接するまで閉動作を行うことにより、第1のコイルバネ195は収縮量x´0だけ基準状態から収縮する。このため、第1のコイルバネ195から第1の可動筒状部材182(可動部)に、弾性力k1(x0+x´0)が作用する。ここで、第1の処置モードでは、第2のスライダー188が第2の可動筒状部材183に対して移動しないため、第2のコイルバネ196は基準状態から収縮しない。このため、第1の処置モードでは、第2のコイルバネ196から第2の可動筒状部材183(可動部)に作用する弾性力は、k2x0から変化しない。したがって、第1の可動ハンドル33がストッパ部181に当接した状態では、弾性部材ユニット125から可動部(第1の可動筒状部材182、第2の可動筒状部材183及び内側パイプ77)に第1の弾性力(k1+k2)x0+k1x´0が作用する。これにより、第1の電極部23とジョー42との間では、第1の把持力F1で把持対象が把持される。
第2の処置モードにおいて第1の電極部23とジョー42との間で把持対象を把持する際には、第2の可動ハンドル35でジョー42の閉操作が行われる。固定ハンドル32に対して第2の可動ハンドル35が閉動作を行うことにより、第2のスライダー188が可動部(第1の可動筒状部材182、第2の可動筒状部材183及び内側パイプ77)及び第1のスライダー187と一体に、長手軸Cに沿って先端方向に向かって移動する。この際、ジョー42が把持対象に接触するまでは、ジョー42が把持対象に接触していない非接触状態であるため、第2のコイルバネ196は基準状態から収縮しない。このため、第2のコイルバネ196から第2の可動筒状部材183に作用する弾性力はk2x0から変化しない。したがって、弾性部材ユニット125から可動部に作用する弾性力は(k1+k2)x0から変化しない。第1の可動筒状部材182、第2の可動筒状部材183及び内側パイプ77が先端方向に移動することにより、第1の電極部23に対してジョー42が閉動作を行う。
そして、ジョー42が把持対象に接触する接触状態になると、第2の可動ハンドル35を固定ハンドル32に対してさらに閉動作させることにより、第2のスライダー188が第2の可動筒状部材183(可動部)に対して先端方向に移動する。これにより、第2のコイルバネ196が基準状態からさらに収縮する。したがって、基準状態での弾性力k2x0より大きい弾性力k2(x0+x´)が第2のコイルバネ196から第2の可動筒状部材183(可動部)に作用し、可動部(第1の可動筒状部材182、第2の可動筒状部材183及び内側パイプ77)がさらに先端方向に移動する。これにより、把持対象に接触したジョー42が第1の電極部23に対してさらに閉動作を行い、ジョー42と第1の電極部23との間で把持対象を把持する把持力が増加する。
そして、第2の可動ハンドル35がストッパ部181に当接するまで閉動作を行うことにより、第2のコイルバネ196は収縮量x´0だけ基準状態から収縮する。このため、第2のコイルバネ196から第2の可動筒状部材183(可動部)に、弾性力k2(x0+x´0)が作用する。ここで、第2の処置モードでは、第1のスライダー187が第1の可動筒状部材182に対して移動しないため、第1のコイルバネ195は基準状態から収縮しない。このため、第2の処置モードでは、第1のコイルバネ195から第1の可動筒状部材182(可動部)に作用する弾性力は、k1x0から変化しない。したがって、第2の可動ハンドル35がストッパ部181に当接した状態では、弾性部材ユニット125から可動部(第1の可動筒状部材182、第2の可動筒状部材183及び内側パイプ77)に第2の弾性力(k1+k2)x0+k2x´0が作用する。ここで、第1の弾性定数k1より第2の弾性定数k2は、大きい。このため、第2の弾性力(k1+k2)x0+k2x´0は、第1の処置モードでの第1の弾性力(k1+k2)x0+k1x´0より大きくなる。これにより、第1の電極部23とジョー42との間では、第1の把持力F1より大きい第2の把持力F2で把持対象が把持される。
以上のように、本実施形態では、固定ハンドル32、第1の可動ハンドル33及び第2の可動ハンドル35が、第1の処置モードと第2の処置モードとの間で、収縮する弾性部材(195,196)の種類を変換する収縮部材変換部となる。収縮部材変換部により、第1の処置モードでは第1の弾性定数k1を有する第1のコイルバネ(第1の弾性部材)195が収縮し、第2の処置モードでは第1の弾性定数k1より大きい第2の弾性定数k2を有する第2のコイルバネ(第2の弾性部材)196が収縮する。このため、固定ハンドル32、第1の可動ハンドル33及び第2の可動ハンドル35が、第1の処置モードで弾性部材ユニット125から可動部(第1の可動筒状部材182、第2の可動筒状部材183及び内側パイプ77)に作用する第1の弾性力(k1+k2)x0+k1x´0より、第2の処置モードで弾性部材ユニット125から可動部(182,183,77)に作用する第2の弾性力(k1+k2)x0+k2x´0を大きくする弾性力変換部となる。したがって、固定ハンドル32、第1の可動ハンドル33及び第2の可動ハンドル35が、第1の処置モードでの第1の電極部23とジョー42との間の第1の把持力F1より、第2の処置モードでの第1の電極部23とジョー42との間の第2の把持力F2を大きくする把持力変換ユニットとなる。
そこで、前記構成の把持処置装置1では、以下の効果を奏する。すなわち、把持処置装置1では、第1の処置モードと第2の処置モードとの間で、収縮する弾性部材(195,196)の種類が変換される。これにより、第1の処置モードでは第1の弾性定数k1を有する第1のコイルバネ(第1の弾性部材)195が収縮し、第2の処置モードでは第1の弾性定数k1より大きい第2の弾性定数k2を有する第2のコイルバネ(第2の弾性部材)196が収縮する。このため、第1の処置モードで弾性部材ユニット125から可動部(第1の可動筒状部材182、第2の可動筒状部材183及び内側パイプ77)に作用する第1の弾性力(k1+k2)x0+k1x´0より、第2の処置モードで弾性部材ユニット125から可動部(182,183,77)に作用する第2の弾性力(k1+k2)x0+k2x´0が大きくなる。したがって、第2の処置モードでは、第1の処置モードでの第1の把持力F1より大きい第2の把持力F2で、第1の電極部23とジョー42との間で把持対象が把持される。このため、第2の処置モードでは第1の処置モードに比べ、高周波電流による生体組織(把持対象)の変成が促進される。したがって、高周波電流による把持対象の凝固性能が向上するため、超音波振動を用いない第2の処置モードにおいても、把持対象の凝固性能の低下を防止することができる。これにより、超音波振動を用いない第2の処置モードにおいても、安定して把持対象(生体組織)を封止することができる。
(第3の実施形態の変形例)
なお、第3の実施形態では、第1の処置モードと第2の処置モードとの間で収縮する弾性部材(195,196)の種類を変換しているが、これに限るものではない。例えば、変形例として図24及び図25に示すように、第1の処置モードと第2の処置モードとの間で収縮する弾性部材の数を変換してもよい。なお、図24は第1の処置モードを示し、図25は第2の処置モードを示している。
図24及び図25に示すように、本変形例のハンドルユニット4は、第3の実施形態と同様に、筒状ケース31、固定ハンドル32及びスイッチ配置部55を備える。また、固定ハンドル32には、ストッパ部181が設けられている。ただし、本変形例では、固定ハンドル32に対して開閉可能な可動ハンドル201が1つのみ設けられている。本変形例においても、第3の実施形態と同様に、可動ハンドル201は固定ハンドル32に対して長手軸Cと略平行に開閉可能である。また、可動ハンドル201は、第1の実施形態の第2の可動ハンドル35と同様の態様で、スライダー部120に取付けられている。
本変形例では、第1の実施形態と同様に、可動筒状部材46が設けられている。スライダー部120は、可動筒状部材46の外周部に位置している。可動筒状部材46(可動部)には、中継部材202が固定されている。また、スライダー部120には、中継部材203が固定されている。中継部材202には、ブロック部205が取付けられている。ブロック部205は、中継部材202に対して長手軸Cに沿って移動可能である。
中継部材202と中継部材203との間は、第1の弾性部材である第1のコイルバネ207を介して接続されている。第1のコイルバネ207は、第1の弾性定数k´1を有する。ブロック部205と中継部材202との間は、第2の弾性部材である第2のコイルバネ208を介して接続されている。第2のコイルバネ208は、第2の弾性定数k´2を有する。なお、第1の弾性定数k´1と第2の弾性定数k´2は、同一の値でもよく、互いに対して異なる値でもよい。また、第1のコイルバネ207及び第2のコイルバネ208は、自然状態から収縮量x0だけ収縮した基準状態で設けられている。したがって、ジョー42が把持対象に接触しない非接触状態では、弾性部材ユニット125から可動部(可動筒状部材46及び内側パイプ77)に弾性力(k´1+k´2)x0が作用している。
また、筒状ケース31の内部には、係合部材210が設けられている。係合部材210は、リンク部211を介して、第2の処置モード入力ボタン57Bに連結されている。第2の処置モード入力ボタン57Bを押圧することにより、リンク部211を介して、係合部材210は中継部材203に向かって押圧される。係合部材210は、中継部材203と係合可能な係合溝212が設けられている。中継部材203が係合溝212に係合することにより、中継部材203とブロック部205との間に係合部材210が連結される。これにより、スライダー部120から、中継部材203及び係合部材210を介して、ブロック部205に力を伝達可能となる。なお、係合部材210と中継部材203とを係合させる構成は、前述のリンク部211に限るものではない。例えば、第2の処置モード入力ボタン57Bが押圧された信号に基づいて駆動する移動ユニットを設けてもよい。この場合、複数の部材を介すことなく、信号に基づいて直接的に係合部材210を移動させることにより、係合部材210を中継部材203と係合させる。
第1の電極部23とジョー42との間で把持対象を把持する際には、可動ハンドル201でジョー42の閉操作が行われる。第1の処置モードでは、第2の処置モード入力ボタン57Bは押圧されない。このため、係合部材210が中継部材203とブロック部205との間に連結されず、スライダー部120からブロック部205に力が伝達されることはない。
ジョー42が把持対象に接触する接触状態で、可動ハンドル201を固定ハンドル32に対して閉動作させることにより、スライダー部120が可動筒状部材46(可動部)に対して先端方向に移動する。この際、スライダー部120からブロック部205に力が伝達されないため、第1のコイルバネ207のみが基準状態から収縮し、第2のコイルバネ208は基準状態から収縮しない。
そして、可動ハンドル201がストッパ部181に当接するまで閉動作を行うことにより、第1のコイルバネ207は収縮量x´0だけ基準状態から収縮する。このため、第1のコイルバネ207から可動筒状部材46(可動部)に、弾性力k´1(x0+x´0)が作用する。この状態で第1の処置モード入力ボタン57Aが押圧される。ここで、第1の処置モードでは、スライダー部120からブロック部205に力が伝達されないため、第2のコイルバネ208は基準状態から収縮しない。このため、第1の処置モードでは、第2のコイルバネ208から可動筒状部材46(可動部)に作用する弾性力は、k´2x0から変化しない。したがって、可動ハンドル201がストッパ部181に当接した状態では、弾性部材ユニット125から可動部(可動筒状部材46及び内側パイプ77)に第1の弾性力(k´1+k´2)x0+k´1x´0が作用する。これにより、第1の電極部23とジョー42との間では、第1の把持力F1で把持対象が把持される。
第2の処置モードでは、ジョー42が把持対象に接触する接触状態で、可動ハンドル201を固定ハンドル32に対して閉動作させることにより、スライダー部120が可動筒状部材46(可動部)に対して先端方向に移動する。そして、可動ハンドル201がストッパ部181に当接するまで閉動作を行うことにより、第1のコイルバネ207は収縮量x´0だけ基準状態から収縮する。このため、第1のコイルバネ207から可動筒状部材46(可動部)に、弾性力k´1(x0+x´0)が作用する。ここで、第2の処置モードでは、この状態で第2の処置モード入力ボタン57Bが押圧される。これにより、係合部材210が中継部材203とブロック部205との間に連結され、スライダー部120からブロック部205に力を伝達可能となる。したがって、第2の処置モードでは、第1のコイルバネ207に加えて第2の弾性部材である第2のコイルバネ208により可動筒状部材46(可動部)とスライダー部120との間が接続されている。つまり、第2の処置モードでは、第2のコイルバネ208は、第1のコイルバネ207に対して並列に配置されている。この際、スライダー部120からブロック部205に力が伝達されるため、第1のコイルバネ207に加え第2のコイルバネ208が基準状態から収縮する。
そして、第2の処置モードでは、スライダー部120からブロック部205に力が伝達されるため、第2のコイルバネ208も基準状態から収縮量x´0だけ収縮する。このため、第2の処置モードでは、第2のコイルバネ208から可動筒状部材46(可動部)に、弾性力k´2(x0+x´0)が作用する。したがって、可動ハンドル201がストッパ部181に当接した状態では、弾性部材ユニット125から可動部(可動筒状部材46及び内側パイプ77)に第1の弾性力(k´1+k´2)x0+k´1x´0より大きい第2の弾性力(k´1+k´2)(x0+x´0)が作用する。これにより、第1の電極部23とジョー42との間では、第1の把持力F1より大きい第2の把持力F2で把持対象が把持される。
以上のように、本変形では、第2の処置モード入力ボタン57Bが、可動部(可動筒状部材46及び内側パイプ77)とスライダー部120との間の接続状態を切替える接続状態切替え部となる。接続状態切替え部(57B)により、第1の処置モードでは第1のコイルバネ207により可動部(46,77)とスライダー部120との間が接続される。また、第2の処置モードでは、第1のコイルバネ207に加えて第1のコイルバネ207に対して並列に配置される第2のコイルバネ208により可動部(46,77)とスライダー部120との間が接続される。すなわち、第2の処置モード入力ボタン57Bが、第1の処置モードと第2の処置モードとの間で、収縮する弾性部材(195,196)の数を変換する収縮部材変換部となる。収縮部材変換部により、第1の処置モードでは第1のコイルバネ(第1の弾性部材)207が収縮し、第2の処置モードでは第1のコイルバネ207に加えて第2のコイルバネ(第2の弾性部材)208が収縮する。このため、第2の処置モード入力ボタン57Bが、第1の処置モードで弾性部材ユニット125から可動部(可動筒状部材46及び内側パイプ77)に作用する第1の弾性力(k´1+k´2)x0+k´1x´0より、第2の処置モードで弾性部材ユニット125から可動部(46,77)に作用する第2の弾性力(k´1+k´2)(x0+x´0)を大きくする弾性力変換部となる。したがって第2の処置モード入力ボタン57Bが、第1の処置モードでの第1の電極部23とジョー42との間の第1の把持力F1より、第2の処置モードでの第1の電極部23とジョー42との間の第2の把持力F2を大きくする把持力変換ユニットとなる。
(第4の実施形態)
次に、本発明の第4の実施形態について、図26乃至図28を参照して説明する。第4の実施形態は、前述の実施形態の構成を次の通り変形したものである。なお、前述の実施形態と同一の部分については同一の符号を付して、その説明は省略する。
図26は、本実施形態の把持処置装置1のハンドルユニット4の構成を示す図である。図26に示すように、把持処置装置1のハンドルユニット4は、第2の実施形態と同様に、固定ハンドル32及び可動ハンドル145を備える。固定ハンドル32には、ストッパ部161が設けられている。可動ハンドル145は、ストッパ部161に当接するまで、固定ハンドル32に対して閉動作可能である。また、ハンドルユニット4は、部材位置切替え部である部材位置切替えレバー162を備える。部材位置切替えレバー162は、絶縁材料から形成され、筒状ケース31に対して長手軸Cに沿って移動可能である。
可動ハンドル145は、スライダー部120に取付けられている。ジョー42が把持対象に接触していない非接触状態では、コイルバネ126は基準状態から収縮しない。したがって、コイルバネ126から可動筒状部材46及び内側パイプ77に作用する弾性力はk0x0から変化しない。可動筒状部材46及び内側パイプ77が先端方向に移動することにより、第1の電極部23に対してジョー42が閉動作を行う。
ジョー42が把持対象に接触する接触状態では、スライダー部120が可動筒状部材46に対して移動し、コイルバネ126が収縮する。そして、可動ハンドル145がストッパ部161に当接するまで閉動作を行った状態では、コイルバネ126は収縮量x3だけ収縮する。この際、弾性部材ユニット125のコイルバネ126から、可動部(可動筒状部材46及び内側パイプ77)に弾性力k0(x0+x3)が作用する。
図27及び図28は、プローブ3の先端部、シース5の先端部及びジョー42を示す図である。図27は第1の処置モードを示し、図28は第2の処置モードを示している。図27及び図28に示すように、シース5とプローブ3との間でプローブを支持する支持部材85は、最も先端方向側に設けられる支持部材85である最先端支持部材85Aを備える。最先端支持部材85Aは、絶縁材料から形成される中継部163を介して、部材位置切替えレバー162に連結されている。中継部163は、内側チューブ75(シース5)とプローブ3との間に長手軸Cに沿って延設されている。最先端支持部材85Aは、中継部163と一体に、シース5及びプローブ3に対して長手軸Cに沿って移動可能である。
最先端支持部材85Aは、第1の部材位置(図27参照)と第1の部材位置より先端方向側に位置する第2の部材位置(図28参照)との間で、シース5及びプローブ3に対して移動可能である。第1の部材位置は例えば2番目に先端方向側に位置する超音波振動の節位置と一致し、第2の部材位置は例えば最も先端方向側に位置する超音波振動の節位置と一致する。部材位置切替えレバー162での切替え操作により、第1の部材位置と第2の部材位置との間で最先端支持部材85Aが移動する。
次に、本実施形態の把持処置装置1の作用について説明する。第1の処置モードにおいて第1の電極部23とジョー42との間で把持対象を把持する際には、部材位置切替えレバー162での切替え操作によって、最先端支持部材85Aを第1の部材位置に移動する。そして、可動ハンドル145でジョー42の閉操作を行い、可動ハンドル145がストッパ部161に当接するまで閉動作を行う。この際、コイルバネ126から可動部(可動筒状部材46及び内側パイプ77)に弾性力k0(x0+x3)が作用している。また、最先端支持部材85Aは第1の部材位置に位置しているため、第1の電極部23から把持対象に第1の押圧力S1が作用している。したがって、第1の電極部23とジョー42との間では、第1の把持力F1で把持対象が把持される。
第2の処置モードにおいて第1の電極部23とジョー42との間で把持対象を把持する際には、部材位置切替えレバー162での切替え操作によって、最先端支持部材85Aを第2の部材位置に移動する。そして、可動ハンドル145でジョー42の閉操作を行い、可動ハンドル145がストッパ部161に当接するまで閉動作を行う。この際、コイルバネ126から可動部(可動筒状部材46及び内側パイプ77)に弾性力k0(x0+x3)が作用している。また、最先端支持部材85Aは第1の部材位置より先端方向側に位置する第2の部材位置に位置している。このため、第1の電極部23から把持対象に第1の押圧力S1より大きい第2の押圧力S2が作用している。したがって、第1の電極部23とジョー42との間では、第1の把持力F1より大きい第2の把持力F2で把持対象が把持される。
以上のように、本実施形態では、部材位置切替えレバー162が、第1の処置モードと第2の処置モードとの間で、プローブ3とシース5との間でのプローブ3の支持状態を変換する支持状態変換部となる。支持状態変換部(162)により、第1の処置モードで第1の電極部23から把持対象に作用する第1の押圧力S1より、第2の処置モードで第1の電極部23から把持対象に作用する第2の押圧力S2が大きくなる。したがって、部材位置切替えレバー162が、第1の処置モードでの第1の電極部23とジョー42との間の第1の把持力F1より、第2の処置モードでの第1の電極部23とジョー42との間の第2の把持力F2を大きくする把持力変換ユニットとなる。
そこで、前記構成の把持処置装置1では、以下の効果を奏する。すなわち、把持処置装置1では、第1の処置モードにおいて最先端支持部材85Aが第1の部材位置に位置し、第2の処置モードにおいて最先端支持部材85Aが第1の部材位置より先端方向側に位置する第2の部材位置に位置している。このため、第1の処置モードで第1の電極部23から把持対象に作用する第1の押圧力S1より、第2の処置モードで第1の電極部23から把持対象に作用する第2の押圧力S2が大きくなる。したがって、第2の処置モードでは、第1の処置モードでの第1の把持力F1より大きい第2の把持力F2で、第1の電極部23とジョー42との間で把持対象が把持される。このため、第2の処置モードでは第1の処置モードに比べ、高周波電流による生体組織(把持対象)の変成が促進される。したがって、高周波電流による把持対象の凝固性能が向上するため、超音波振動を用いない第2の処置モードにおいても、把持対象の凝固性能の低下を防止することができる。これにより、超音波振動を用いない第2の処置モードにおいても、安定して把持対象(生体組織)を封止することができる。
(第4の実施形態の変形例)
なお、第4の実施形態では、最先端支持部材85Aを移動させることにより、第1の処置モードと第2の処置モードとの間でプローブ3の支持状態を変換しているが、これに限るものではない。例えば、変形例として図29乃至図31に示すように、最先端支持部材85Aが移動しない構成でもよい。本変形例では、移動部材171が設けられている。また、ハンドルユニット4には、部材位置切替え部である部材位置切替えスイッチ172が設けられている。移動部材171と部材位置切替えスイッチ172との間は、中継部173を介して連結されている。中継部173は、シース5とプローブ3との間に長手軸Cに沿って延設されている。移動部材171、部材位置切替えスイッチ172及び中継部173は、絶縁材料から形成されている。また、最先端支持部材85Aの位置は、例えば2番目に先端方向側に位置する超音波振動の節位置と一致する。
移動部材171は、部材位置切替えスイッチ172での切替え操作により、シース5及びプローブ3に対して、長手軸Cに沿って移動する。図30に示すように、第1の処置モードでは移動部材171は部材位置切替えスイッチ172での切替え操作によって、シース5の先端より先端方向側の第1の部材位置に位置している。第1の部材位置では、移動部材171は第1の電極部23に接触しない。このため、最先端支持部材85Aより先端方向側では、プローブ3は支持されない。
図31に示すように、第2の処置モードでは移動部材171は、部材位置切替えスイッチ172での切替え操作によって、第1の部材位置より基端方向側で、かつ、シース5とプローブ3との間の第2の部材位置に位置している。第2の部材位置では、移動部材171はプローブ3を支持する。第2の部材位置は、最先端支持部材85Aより先端方向側に位置している。すなわち、第2の処置モードでは、最先端支持部材85Aより先端方向側でプローブ3が支持される。
以上のように、本変形例では、部材位置切替えスイッチ172が、第1の処置モードと第2の処置モードとの間で、プローブ3とシース5との間でのプローブ3の支持状態を変換する支持状態変換部となる。支持状態変換部(172)により、第1の処置モードで第1の電極部23から把持対象に作用する第1の押圧力S1より、第2の処置モードで第1の電極部23から把持対象に作用する第2の押圧力S2が大きくなる。したがって、部材位置切替えスイッチ172が、第1の処置モードでの第1の電極部23とジョー42との間の第1の把持力F1より、第2の処置モードでの第1の電極部23とジョー42との間の第2の把持力F2を大きくする把持力変換ユニットとなる。
(第5の実施形態)
次に、本発明の第5の実施形態について、図32及び図33を参照して説明する。第5の実施形態は、前述の実施形態の構成を次の通り変形したものである。なお、前述の実施形態と同一の部分については同一の符号を付して、その説明は省略する。
図32及び図33は、本実施形態の把持処置装置1の構成を示す図である。図32は第1の処置モードを示し、図33は第2の処置モードを示している。図32及び図33に示すように、把持処置装置1のハンドルユニット4は、第4の実施形態と同様に、固定ハンドル32及び可動ハンドル145を備える。固定ハンドル32には、ストッパ部161が設けられている。可動ハンドル145は、ストッパ部161に当接するまで、固定ハンドル32に対して閉動作可能である。また、ハンドルユニット4は、移動位置切替え部である移動位置切替えボタン221を備える。移動位置切替えボタン221は、絶縁材料から形成されている。
可動ハンドル145は、スライダー部120に取付けられている。ジョー42が把持対象に接触していない非接触状態では、コイルバネ126は基準状態から収縮しない。したがって、コイルバネ126から可動筒状部材46及び内側パイプ77に作用する弾性力はk0x0から変化しない。可動筒状部材46及び内側パイプ77が先端方向に移動することにより、第1の電極部23に対してジョー42が閉動作を行う。
ジョー42が把持対象に接触する接触状態では、スライダー部120が可動筒状部材46に対して移動し、コイルバネ126が収縮する。そして、可動ハンドル145がストッパ部161に当接するまで閉動作を行った状態では、コイルバネ126は収縮量x3だけ収縮する。この際、弾性部材ユニット125のコイルバネ126から、可動部(可動筒状部材46及び内側パイプ77)に弾性力k0(x0+x3)が作用する。
また、シース5の外周方向側には、筒状の移動部材222が設けられている。移動部材222は、長手軸Cに沿って延設され、移動位置切替えボタン221に連結されている。移動部材222は、移動位置切替えボタン221での切替え操作により、シース5に対して長手軸Cに沿って移動可能である。移動部材222は、第1の移動位置(図32参照)と第2の移動位置(図33参照)との間で移動可能である。
図32に示すように、第1の移動位置では、移動部材222の先端は、シース5の先端より基端方向側に位置している。また、第1の移動位置では、移動部材222はジョー42に接触していない。図33に示すように、第2の移動位置では、移動部材222の先端は、シース5の先端より先端方向側に位置している。また、第2の移動位置では、移動部材222はジョー42に接触している。このため、ジョー42は、移動部材222により第1の電極部23に向かって押圧されている。
第1の処置モードにおいて第1の電極部23とジョー42との間で把持対象を把持する際には、移動位置切替えボタン221での操作により移動部材222を第1の移動位置に移動する。そして、可動ハンドル145でジョー42の閉操作を行い、可動ハンドル145がストッパ部161に当接するまで閉動作を行う。この際、コイルバネ126から可動部(可動筒状部材46及び内側パイプ77)に弾性力k0(x0+x3)が作用している。したがって、第1の電極部23とジョー42との間では、第1の把持力F1で把持対象が把持される。
第2の処置モードにおいて第1の電極部23とジョー42との間で把持対象を把持する際には、移動位置切替えボタン221での操作により移動部材222を第2の移動位置に移動する。そして、可動ハンドル145でジョー42の閉操作を行い、可動ハンドル145がストッパ部161に当接するまで閉動作を行う。この際、コイルバネ126から可動部(可動筒状部材46及び内側パイプ77)に弾性力k0(x0+x3)が作用している。また、移動部材222が第2の移動位置に位置するため、ジョー42は移動部材222により第1の電極部23に向かって押圧されている。したがって、第1の電極部23とジョー42との間では、第1の把持力F1より大きい第2の把持力F2で把持対象が把持される。
以上のように、移動位置切替えボタン221が、第1の処置モードでの第1の電極部23とジョー42との間の第1の把持力F1より、第2の処置モードでの第1の電極部23とジョー42との間の第2の把持力F2を大きくする把持力変換ユニットとなる。
そこで、前記構成の把持処置装置1では、以下の効果を奏する。すなわち、把持処置装置1では、第1の処置モードにおいて、コイルバネ126から可動部(可動筒状部材46及び内側パイプ77)に弾性力k0(x0+x3)が作用している。第2の処置モードでは、コイルバネ126から可動部(可動筒状部材46及び内側パイプ77)に弾性力k0(x0+x3)が作用することに加え、移動部材222によりジョー42が第1の電極部23に向かって押圧されている。したがって、第2の処置モードでは、第1の処置モードでの第1の把持力F1より大きい第2の把持力F2で、第1の電極部23とジョー42との間で把持対象が把持される。このため、第2の処置モードでは第1の処置モードに比べ、高周波電流による生体組織(把持対象)の変成が促進される。したがって、高周波電流による把持対象の凝固性能が向上するため、超音波振動を用いない第2の処置モードにおいても、把持対象の凝固性能の低下を防止することができる。これにより、超音波振動を用いない第2の処置モードにおいても、安定して把持対象(生体組織)を封止することができる。
(その他の変形例)
なお、前述の実施形態では、第1の処置モードにおいて、高周波電流供給部9から高周波電流が出力され、第1の電極部25及び第2の電極部93に高周波電流が伝達される。しかし、第1の処置モードにおいて、例えば高周波電流供給部9から高周波電流が出力されず、第1の電極部25及び第2の電極部93に高周波電流が伝達されなくてもよい。すなわち、第1の処置モードでは、少なくとも超音波振動子12で超音波振動が発生し、第1の電極部23に少なくとも超音波振動が伝達されればよい。これにより、第1の処置モードにおいて、生体組織等の把持対象の凝固切開が行われる。
以上より、本発明では、プローブ3の第1の電極部23に少なくとも超音波振動が伝達される第1の処置モードでの第1の電極部23とジョー52との間の第1の把持力F1より、第1の電極部23及び第2の電極部93に高周波電流のみが伝達される第2の処置モードでの第1の電極部23とジョー52との間の第2の把持力F2を大きくする把持力変換ユニット(32,33,35;147;162;172;57B;221)が設けられていればよい。
以上、本発明の実施形態について説明したが、本発明は前記の実施形態に限定されるものではなく、本発明の要旨を逸脱しない範囲で種々の変形ができることは勿論である。