JP5512682B2 - 眼球運動、特に眼底の運動の測定装置および測定方法 - Google Patents
眼球運動、特に眼底の運動の測定装置および測定方法 Download PDFInfo
- Publication number
- JP5512682B2 JP5512682B2 JP2011528229A JP2011528229A JP5512682B2 JP 5512682 B2 JP5512682 B2 JP 5512682B2 JP 2011528229 A JP2011528229 A JP 2011528229A JP 2011528229 A JP2011528229 A JP 2011528229A JP 5512682 B2 JP5512682 B2 JP 5512682B2
- Authority
- JP
- Japan
- Prior art keywords
- eye
- detector
- image
- displacement
- fundus
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
- 230000033001 locomotion Effects 0.000 title claims description 78
- 230000004424 eye movement Effects 0.000 title claims description 28
- 238000000034 method Methods 0.000 title claims description 20
- 238000006073 displacement reaction Methods 0.000 claims description 69
- 238000005286 illumination Methods 0.000 claims description 53
- 230000003287 optical effect Effects 0.000 claims description 43
- 230000001427 coherent effect Effects 0.000 claims description 38
- 238000001514 detection method Methods 0.000 claims description 23
- 210000001747 pupil Anatomy 0.000 claims description 15
- 238000004364 calculation method Methods 0.000 claims description 13
- 238000003384 imaging method Methods 0.000 claims description 13
- 210000003786 sclera Anatomy 0.000 claims description 13
- 238000004590 computer program Methods 0.000 claims description 4
- 241000699666 Mus <mouse, genus> Species 0.000 claims 1
- 241000699670 Mus sp. Species 0.000 claims 1
- 210000000337 motor cortex Anatomy 0.000 claims 1
- 210000001508 eye Anatomy 0.000 description 40
- 238000005259 measurement Methods 0.000 description 35
- 238000011282 treatment Methods 0.000 description 21
- 238000011156 evaluation Methods 0.000 description 13
- 210000004087 cornea Anatomy 0.000 description 9
- 230000000875 corresponding effect Effects 0.000 description 7
- 210000001525 retina Anatomy 0.000 description 5
- 230000002207 retinal effect Effects 0.000 description 5
- 230000002596 correlated effect Effects 0.000 description 4
- 230000002911 mydriatic effect Effects 0.000 description 4
- 238000012545 processing Methods 0.000 description 4
- 230000003595 spectral effect Effects 0.000 description 4
- 238000004422 calculation algorithm Methods 0.000 description 3
- 230000015271 coagulation Effects 0.000 description 3
- 238000005345 coagulation Methods 0.000 description 3
- 238000003745 diagnosis Methods 0.000 description 3
- 238000003708 edge detection Methods 0.000 description 3
- 210000000744 eyelid Anatomy 0.000 description 3
- 238000001454 recorded image Methods 0.000 description 3
- 210000004204 blood vessel Anatomy 0.000 description 2
- 210000005252 bulbus oculi Anatomy 0.000 description 2
- 230000008878 coupling Effects 0.000 description 2
- 238000010168 coupling process Methods 0.000 description 2
- 238000005859 coupling reaction Methods 0.000 description 2
- 230000001419 dependent effect Effects 0.000 description 2
- 230000009545 invasion Effects 0.000 description 2
- 238000001356 surgical procedure Methods 0.000 description 2
- 235000002673 Dioscorea communis Nutrition 0.000 description 1
- 241000544230 Dioscorea communis Species 0.000 description 1
- 229910000530 Gallium indium arsenide Inorganic materials 0.000 description 1
- 208000035753 Periorbital contusion Diseases 0.000 description 1
- 230000001133 acceleration Effects 0.000 description 1
- 230000003667 anti-reflective effect Effects 0.000 description 1
- 238000005311 autocorrelation function Methods 0.000 description 1
- 238000010276 construction Methods 0.000 description 1
- 238000005314 correlation function Methods 0.000 description 1
- 239000006059 cover glass Substances 0.000 description 1
- 238000011157 data evaluation Methods 0.000 description 1
- 230000007423 decrease Effects 0.000 description 1
- 239000006185 dispersion Substances 0.000 description 1
- 239000000428 dust Substances 0.000 description 1
- 230000000694 effects Effects 0.000 description 1
- 231100000040 eye damage Toxicity 0.000 description 1
- 239000000835 fiber Substances 0.000 description 1
- 230000004886 head movement Effects 0.000 description 1
- 230000000414 obstructive effect Effects 0.000 description 1
- 239000002245 particle Substances 0.000 description 1
- 238000002428 photodynamic therapy Methods 0.000 description 1
- 230000005855 radiation Effects 0.000 description 1
- 230000011514 reflex Effects 0.000 description 1
- 238000011160 research Methods 0.000 description 1
- 230000004044 response Effects 0.000 description 1
- 230000004434 saccadic eye movement Effects 0.000 description 1
- 239000004065 semiconductor Substances 0.000 description 1
- 230000002123 temporal effect Effects 0.000 description 1
- 230000001225 therapeutic effect Effects 0.000 description 1
- 210000003462 vein Anatomy 0.000 description 1
Images




Classifications
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B3/00—Apparatus for testing the eyes; Instruments for examining the eyes
- A61B3/10—Objective types, i.e. instruments for examining the eyes independent of the patients' perceptions or reactions
- A61B3/113—Objective types, i.e. instruments for examining the eyes independent of the patients' perceptions or reactions for determining or recording eye movement
-
- G—PHYSICS
- G02—OPTICS
- G02B—OPTICAL ELEMENTS, SYSTEMS OR APPARATUS
- G02B27/00—Optical systems or apparatus not provided for by any of the groups G02B1/00 - G02B26/00, G02B30/00
- G02B27/0093—Optical systems or apparatus not provided for by any of the groups G02B1/00 - G02B26/00, G02B30/00 with means for monitoring data relating to the user, e.g. head-tracking, eye-tracking
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B3/00—Apparatus for testing the eyes; Instruments for examining the eyes
- A61B3/10—Objective types, i.e. instruments for examining the eyes independent of the patients' perceptions or reactions
- A61B3/12—Objective types, i.e. instruments for examining the eyes independent of the patients' perceptions or reactions for looking at the eye fundus, e.g. ophthalmoscopes
- A61B3/1225—Objective types, i.e. instruments for examining the eyes independent of the patients' perceptions or reactions for looking at the eye fundus, e.g. ophthalmoscopes using coherent radiation
Description
本発明の有利な形態は、従属請求項に記載されている。
散乱表面、例えば紙または壁を、レーザまたは他の空間的および時間的にコヒーレントな光源により照明すると、表面から後方散乱された光が空間中で干渉することがあり、通常は粒子状の構造またはスペックル(英語「speckles」)が発生する。これを本発明においては、スペックルパターンと称する。主観的スペックルと客観的スペックルが区別される。主観的スペックルは、散乱表面が光学系によりカメラセンサに結像されるときに発生する。主観的スペックルは、結像システムの光学的分解能とまったく同じ大きさである。このようにして記録されたスペックルパターンは、散乱表面の変位の際にともに変位し、したがって変位の量的決定を可能にする。客観的スペックルは、光学系を備えないカメラセンサが、試料から後方散乱光中に配置される場合に発生する。客観的スペックルは、試料表面の傾斜に反応する。客観的スペックルの大きさは、光線の波長、照明される試料面の直径、および試料面とカメラセンサとの間隔から計算される。以下の量が、とくに眼においてとりわけスペックル相関技術により測定することができる。
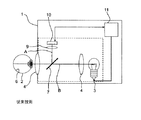
眼底全体6を、第1のIR光源3、例えばIR−LED、またはスペクトルフィルタを備える白色光ランプにより照明する。眼底6から後方散乱された光を、位置分解検出器10、例えばCMOSカメラまたはCCDカメラに結像させる。全体画像を、1Hzから30Hzの画像反復周波数(フレーム毎秒)により記録し、コンピュータモニタ(図2)に表示する。組合せ型運動測定装置のこの低速部分用のハードウェアは、IRモニタまたはIR調整補助として、すでにすべての非散瞳型眼底カメラで技術的に実施されている。このようにして撮影された全体眼底画像から、可能な限り明確に構造化された4つの画像詳細を含む2n×2nピクセルの正方形画像野を切り出す。すべての全体画像を第1の全体画像に対して相互相関させ、第1の全体画像に対する各全体画像の変位を決定する。第1の全体画像は、一連の全体画像の最初の画像とすることができ、したがって第1の全体画像に対するさらなる各全体画像の変位は既知である。とくに好ましい1変形実施形態では、標準の眼底カメラによって、眼底6のカラー画像とこれに所属のIR画像を撮影する。これらの画像によって、医師は実施すべき治療/診断、例えば眼底6の領域のレーザ凝固術を計画することができる。次に治療/診断の開始時に、眼底の第1のIR全体画像を撮影し、眼底6の出発状態を決定するために治療計画記録のIR画像に対して相関させる。次いで、後続の全体画像を常に、第1の全体画像に対して、または治療計画記録のIR画像に対して相関させる。このようにして例えばレーザコアギュレータで、前もって計画した眼底のスポットを走査し、治療することができる。なぜなら眼底6の運動が、治療計画に対して測定されるからである。相関のための画像野は、(例えば内部固定によりサポートされる)特別な観察事例で発生する眼球運動の最大振幅、すなわち眼底6の潜在的運動野が、画像野の大きさより小さくなるように選択される。この際、眼底運動を確実に検知できるようにするために、全体画像の光学的品質に依存するある最小サイズを下回ってはならない(したがって好ましくはn=6...9である)。
高速の運動測定装置では、眼底6の小さい一部分をコヒーレントなIRレーザ照明12により照明する。眼底6におけるコヒーレントな照明領域の直径は平面角で約1°〜10°であり、これにより眼底6の光線負荷は可能な限り小さくなり、したがって眼底カメラ検出器10の画像野よりも格段に小さい。しかし1°〜10°という照明面は、典型的な共焦点スポット照明の照明面よりも格段に大きい。眼底6から反射した光はスペックルパターンの形で干渉し、このスペックルパターンを低分解能の位置分解検出器15により部分画像として記録する。検出器の技術的構成の例は、CCDカメラ、CMOSカメラ、またはInGaAsカメラであり、好ましくは小さな画像部分(英語「region of interest(関心領域)」ROI)だけが読み出される。検出光学系9Bのアパーチャは、照明光源12のコヒーレントな性質により生じるスペックルの大きさが、少なくとも検出器15のピクセルと同じ大きさであるように設計される。
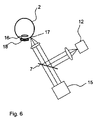
とりわけ高い精度を必要とする、角膜の屈折外科的治療(例えばフェムト秒レーシック;fsレーシック)では、眼の位置を規定するためにコンタクトレンズが使用される。この場合、眼の運動は理論的に不可能である。しかし眼とコンタクトレンズとの間の力が比較的強い場合には、眼がコンタクトレンズに平行に変位することがある。この場合、治療レーザを追跡または遮断するために、この変位を高速で測定しなければならないこととなる。まさにこの測定課題を、1つの検出器のみを備える本発明の装置がとりわけ簡単かつ有利に解決する。
2 眼
3 第1の光源
4 フロント対物レンズ
5 瞳
6 眼底
7 ビームスプリッタ
8 絞り
9 検出光学系
10 第1の検出器
11 制御ユニット
12 第2の光源
13 リングミラー
14 リング絞り
15 第2の検出器
16 角膜
17 強膜
18 カバーガラス
19 照明光学系
20 ビームコンバイナ
A 結像光線路
B 照明光線路
ZB 中間画像面
f、f’ 焦点距離
Claims (26)
- 眼(2)の運動を測定するための装置であって、
眼(2)の潜在的運動野を、第1の画像反復周波数により全体画像として反復して記録するための第1の2次元位置分解検出器(10)と、
眼(2)のそれぞれの部分を、該第1の画像反復周波数より高い第2の画像反復周波数により部分画像として反復して記録するための第2の2次元位置分解検出器(15)と、
2つの全体画像に基づいてその間の変位を求め、2つの部分画像に基づいてその間の変位を求め、これらの変位を連結することにより眼(2)の運動を求めるための計算ユニット(11)と、
眼(2)の潜在的運動野をインコヒーレント光により照明するための第1の光源(3)と、
眼(2)のそれぞれの部分をコヒーレント光により、眼(2)で散乱した干渉性のコヒーレント光によって該当する部分にスペックルパターンが発生するように照明するための第2の光源(12)と
を備え、
該第2の検出器(15)が、該スペックルパターンの少なくとも一部分を、該当する部分画像として記録するように構成されていることを特徴とする装置。 - 前記第2の検出器(15)が、スペックルパターンを該第2の検出器(15)に、スペックルパターンの個々のスペックルが該第2の検出器(15)の画素の大きさに対応するか、またはそれより大きい大きさを有するように拡大して結像するための光学系(9B)を有することを特徴とする請求項1に記載の装置。
- 前記第1の光源(3)が、眼底(6)を赤外線光により照明するように構成されていること、
前記第1の検出器(10)が、眼底(6)の少なくとも一部分を、眼の潜在的運動野として記録するように構成されていること、
前記第2の光源(12)が、眼底(6)のそれぞれの部分を赤外線光により照明するように構成されていること
を特徴とする、眼(2)の眼底の運動を測定するための請求項1または2記載の装置。 - 前記第2の光源(12)が、(平面)照明角が1°〜10°になるように構成されていることを特徴とする請求項1乃至3のいずれか1項に記載の装置。
- 前記第2の光源(12)が、眼瞳(5)の平面内で実質的に点状に構成されていることを特徴とする請求項1乃至4のいずれか1項に記載の装置。
- 前記第2の光源(12)が、眼(2)の瞳(5)に対して共役な平面内にコヒーレント光を集束するように構成されていることを特徴とする請求項1乃至5のいずれか1項に記載の装置。
- 前記第2の光源(12)のコヒーレント光の眼(2)への中央入射方向が、前記第2の検出器(15)の観察方向と実質的に一致することを特徴とする請求項1乃至6のいずれか1項に記載の装置。
- 前記第2の検出器(15)が、レーザマウスの検出器として構成されていることを特徴とする請求項1乃至7のいずれか1項に記載の装置。
- 前記第2の検出器(15)が、それぞれの部分に対して光学的に共役な平面(ZB)内に配置されていることを特徴とする請求項1乃至8のいずれか1項に記載の装置。
- 前記計算ユニット(11)が、コヒーレントな照明において、該当する2つの画像の画像内容の少なくともそれぞれ一部分を比較することにより、前記変位を求めることを特徴とする請求項1乃至9のいずれか1項に記載の装置。
- 前記計算ユニット(11)は、記録されたスペックルパターンの少なくともそれぞれ一部分を比較することにより、前記変位を求めることを特徴とする請求項10に記載の装置。
- 第1の2次元位置分解検出器によって、少なくとも眼の潜在的運動野が第1の画像反復周波数により全体画像として反復して記録され、
第2の2次元位置分解検出器によって、眼のそれぞれの部分が、該第1の画像反復周波数より高い第2の画像反復周波数により全体画像として反復して記録され、2つの全体画像に基づいてその間の変位が求められ、2つの部分画像に基づいてその間の変位が求められ、これら2つの変位の連結によって眼の運動が求められる、眼の運動を測定する方法において、
眼の潜在的運動野が、第1の光源からのインコヒーレント光により照明され、
眼のそれぞれの部分が、第2の光源からのコヒーレント光により、眼で散乱した干渉性のコヒーレント光によって該当する部分にスペックルパターンが発生するように照明され、
該スペックルパターンの少なくとも一部分が、前記第2の2次元位置分解検出器により、該当する部分画像として記録されることを特徴とする方法。 - 眼(2)の運動を測定するための装置であって、眼(2)の一部を部分画像として反復して記録するための2次元位置分解検出器(15)を備える前記装置において、
眼(2)の強膜(17)をコヒーレント光により、該強膜(17)で散乱した干渉性の光によってスペックルパターンが発生するように照明する光源(12)と、
該検出器(15)が、該スペックルパターンの少なくとも一部分を部分画像として記録するように構成されていること、
2つの部分画像に基づいてスペックルパターンのその間の変位を求め、該変位に基づいて眼(2)の運動を求めるための計算ユニットと
を特徴とする装置。 - 前記計算ユニットが、該当する部分画像の画像内容を比較することにより、前記変位を求めることを特徴とする請求項13に記載の装置。
- 前記検出器(15)が、スペックルパターンを該検出器(15)に、スペックルパターンの個々のスペックルが該検出器(15)の画素の大きさにほぼ対応するか、またはそれより大きい大きさを有するように、拡大して結像するための光学系を有することを特徴とする請求項13または14に記載の装置。
- 前記光源(12)が、(平面)照明面積が10μm2〜1mm2になるように構成されていることを特徴とする請求項13乃至15のいずれか1項に記載の装置。
- 前記光源(12)のコヒーレント光の眼への中央入射方向が、前記検出器(15)の観察方向と実質的に一致することを特徴とする請求項13乃至16のいずれか1項に記載の装置。
- 前記検出器(15)が、レーザマウスの検出器として構成されていることを特徴とする請求項13乃至17のいずれか1項に記載の装置。
- 前記検出器(15)が、それぞれの部分に対して光学的に共役な平面内に配置されていることを特徴とする請求項13乃至18のいずれか1項に記載の装置。
- 眼底カメラ(1)または眼科学レーザシステム内に配置されていることを特徴とする請求項13乃至19のいずれか1項に記載の装置。
- 照明および検出のための無反射フロント対物レンズ、または照明および検出の軸外れ構成を特徴とする請求項20に記載の装置。
- 2次元位置分解検出器によって眼の一部を部分画像として反復して記録する、眼の運動を測定する方法において、
眼の強膜がコヒーレント光の光源によって、該強膜で散乱する干渉性の光によってスペックルパターンが発生するように照明され、該スペックルパターンから該検出器によってそれぞれの部分が部分画像として記録され、2つの部分画像に基づいて記録されたスペックルパターンの少なくとも一部分のその間の変位が求められ、該変位に基づいて眼の運動が求められることを特徴とする方法。 - 該当する2つの部分画像の画像内容の比較により、前記変位が求められることを特徴とする請求項22に記載の方法。
- 記録された2つ以上の部分画像が、それぞれ求められた変位に基づいてモザイク状に1つの全体画像に統合され、それぞれ最後に記録された部分画像に対するスペックルパターンの変位が、該部分画像の画像内容と該全体画像の画像内容との比較によって求められることを特徴とする請求項22または23に記載の方法。
- 前記運動が出力されることを特徴とする請求項12または22乃至24のいずれか1項に記載の方法。
- 請求項12または22乃至25のいずれか1項に記載の方法を実施するように構成された、コンピュータプログラム、該コンピュータプログラムを備えるデータ媒体、または制御ユニット。
Applications Claiming Priority (5)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| DE102008049881.5 | 2008-09-30 | ||
| DE102008049881A DE102008049881A1 (de) | 2008-09-30 | 2008-09-30 | Anordnung und Verfahren zur Messung einer Augenbewegung, insbesondere einer Bewegung des Augenhintergrunds |
| DE102008049846A DE102008049846A1 (de) | 2008-09-30 | 2008-09-30 | Anordnung und Verfahren zur schnellen Messung einer Augenbewegung |
| DE102008049846.7 | 2008-09-30 | ||
| PCT/EP2009/006816 WO2010037485A1 (de) | 2008-09-30 | 2009-09-22 | Anordnungen und verfahren zur messung einer augenbewegung, insbesondere einer bewegung des augenhintergrunds |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2012503996A JP2012503996A (ja) | 2012-02-16 |
| JP2012503996A5 JP2012503996A5 (ja) | 2012-11-08 |
| JP5512682B2 true JP5512682B2 (ja) | 2014-06-04 |
Family
ID=41403423
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2011528229A Active JP5512682B2 (ja) | 2008-09-30 | 2009-09-22 | 眼球運動、特に眼底の運動の測定装置および測定方法 |
Country Status (3)
| Country | Link |
|---|---|
| US (1) | US8596786B2 (ja) |
| JP (1) | JP5512682B2 (ja) |
| WO (1) | WO2010037485A1 (ja) |
Families Citing this family (15)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US8182267B2 (en) * | 2006-07-18 | 2012-05-22 | Barry Katz | Response scoring system for verbal behavior within a behavioral stream with a remote central processing system and associated handheld communicating devices |
| US20110115894A1 (en) * | 2009-11-19 | 2011-05-19 | Daniel Rogers Burnett | Device and method for diagnosis and monitoring of neural, opthalmologic and retinal disorders |
| EP2415393B1 (en) * | 2010-08-05 | 2016-07-27 | Nidek Co., Ltd. | Ophthalmic apparatus |
| JP5500587B2 (ja) * | 2010-08-05 | 2014-05-21 | 株式会社ニデック | 眼科測定装置 |
| JP5721478B2 (ja) * | 2011-03-10 | 2015-05-20 | キヤノン株式会社 | 撮像装置及び撮像装置の制御方法 |
| EP2712541B1 (en) * | 2012-09-27 | 2015-12-30 | SensoMotoric Instruments Gesellschaft für innovative Sensorik mbH | Tiled image based scanning for head and/or eye position for eye tracking |
| CA2902760A1 (en) * | 2013-02-27 | 2014-09-04 | Optovue, Inc. | Automatic alignment of an imager |
| EP2967315B1 (en) * | 2013-03-15 | 2022-07-27 | Vasoptic Medical, Inc. | Ophthalmic examination and disease management with multiple illumination modalities |
| WO2018211902A1 (ja) * | 2017-05-16 | 2018-11-22 | ソニー株式会社 | 制御装置、制御方法、及びプログラム |
| CN113924071A (zh) * | 2019-05-03 | 2022-01-11 | 马克·洛巴诺夫 | 用于手术过程的近红外照明 |
| CN112807005A (zh) * | 2019-11-15 | 2021-05-18 | 上海西门子医疗器械有限公司 | 计算机断层扫描方法、设备和系统 |
| US11617508B2 (en) * | 2020-02-28 | 2023-04-04 | Meta Platforms Technologies, Llc | Eye-tracking fundus imaging system |
| US11867900B2 (en) | 2020-02-28 | 2024-01-09 | Meta Platforms Technologies, Llc | Bright pupil eye-tracking system |
| DE102020209379A1 (de) * | 2020-07-24 | 2022-01-27 | Carl Zeiss Meditec Ag | Verfahren und Vorrichtung zur Einstellung und Kontrolle von Parametern des Beleuchtungsfeldes ophthalmologischer Geräte |
| CN113933265B (zh) * | 2021-09-27 | 2023-01-03 | 中国科学院长春光学精密机械与物理研究所 | 散斑测量装置及测量分析方法 |
Family Cites Families (18)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS60174905A (ja) | 1984-02-22 | 1985-09-09 | Hitachi Ltd | 距離測定装置 |
| JP2641220B2 (ja) * | 1987-10-28 | 1997-08-13 | 興和株式会社 | 速度分布測定装置 |
| JPH01262835A (ja) | 1988-04-15 | 1989-10-19 | Kowa Co | 眼科診断方法及び装置 |
| US5098426A (en) * | 1989-02-06 | 1992-03-24 | Phoenix Laser Systems, Inc. | Method and apparatus for precision laser surgery |
| JPH02268725A (ja) * | 1989-04-10 | 1990-11-02 | Kowa Co | 眼科測定方法及び装置 |
| DE69020410T2 (de) * | 1989-04-10 | 1995-12-21 | Kowa Co | Verfahren und Gerät für augenoptische Messungen. |
| JP3332535B2 (ja) * | 1993-12-14 | 2002-10-07 | キヤノン株式会社 | 眼科測定装置 |
| US5644642A (en) * | 1995-04-03 | 1997-07-01 | Carl Zeiss, Inc. | Gaze tracking using optical coherence tomography |
| US5786804A (en) * | 1995-10-06 | 1998-07-28 | Hewlett-Packard Company | Method and system for tracking attitude |
| DE10196226B3 (de) | 2000-05-20 | 2012-02-23 | SensoMotoric Instruments Gesellschaft für innovative Sensorik mbH | Vorrichtung zur Bestimmung und Verminderung dynamischer Positionierungsfehler eines Ablations-Lasers während refraktiver Laserchirurgie |
| WO2002064031A2 (en) * | 2001-02-09 | 2002-08-22 | Sensomotoric Instruments Gmbh | Multidimensional eye tracking and position measurement system |
| US6726325B2 (en) * | 2002-02-26 | 2004-04-27 | Carl Zeiss Meditec, Inc. | Tracking assisted optical coherence tomography |
| US7321359B2 (en) * | 2003-07-30 | 2008-01-22 | Avago Technologies Ecbu Ip (Singapore) Pte. Ltd. | Method and device for optical navigation |
| US7805009B2 (en) * | 2005-04-06 | 2010-09-28 | Carl Zeiss Meditec, Inc. | Method and apparatus for measuring motion of a subject using a series of partial images from an imaging system |
| US7878910B2 (en) * | 2005-09-13 | 2011-02-01 | Igt | Gaming machine with scanning 3-D display system |
| WO2007127291A2 (en) | 2006-04-24 | 2007-11-08 | Physical Sciences, Inc. | Stabilized retinal imaging with adaptive optics |
| WO2008077854A1 (de) | 2006-12-22 | 2008-07-03 | Ophthametrics Ag | Ophthalmologisches gerät sowie verfahren zur bestimmung einer position eines auges eines patienten |
| DE102007056528B3 (de) * | 2007-11-16 | 2009-04-02 | Seereal Technologies S.A. | Verfahren und Vorrichtung zum Auffinden und Verfolgen von Augenpaaren |
-
2009
- 2009-09-22 US US13/121,557 patent/US8596786B2/en active Active
- 2009-09-22 JP JP2011528229A patent/JP5512682B2/ja active Active
- 2009-09-22 WO PCT/EP2009/006816 patent/WO2010037485A1/de active Application Filing
Also Published As
| Publication number | Publication date |
|---|---|
| WO2010037485A1 (de) | 2010-04-08 |
| JP2012503996A (ja) | 2012-02-16 |
| US20110176110A1 (en) | 2011-07-21 |
| US8596786B2 (en) | 2013-12-03 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5512682B2 (ja) | 眼球運動、特に眼底の運動の測定装置および測定方法 | |
| US9042622B2 (en) | Optical coherence tomographic apparatus, control method for optical coherence tomographic apparatus and storage medium | |
| JP5970682B2 (ja) | 眼球計測装置、眼球計測方法 | |
| JP5685013B2 (ja) | 光断層撮像装置及びその制御方法、プログラム | |
| US9875541B2 (en) | Enhanced algorithm for the detection of eye motion from fundus images | |
| US20100182612A1 (en) | Optical tomographic imaging apparatus | |
| JP7057186B2 (ja) | 眼科装置、及び眼科情報処理プログラム | |
| US20120229762A1 (en) | Photographing apparatus and image processing method | |
| JPH0866421A (ja) | 眼科手術装置 | |
| JP2023126361A (ja) | 眼科装置、その制御方法、プログラム、及び記録媒体 | |
| US11806077B2 (en) | Ophthalmologic apparatus, and ophthalmologic information processing apparatus | |
| JP2020081469A (ja) | 眼科装置 | |
| WO2011145182A1 (ja) | 光干渉断層画像計測装置 | |
| WO2021153086A1 (ja) | 眼科装置、その制御方法、及び記録媒体 | |
| JP7410481B2 (ja) | 画像処理方法、走査型イメージング方法、画像処理装置、その制御方法、走査型イメージング装置、その制御方法、プログラム、及び記録媒体 | |
| JP2022060588A (ja) | 眼科装置、及び眼科装置の制御方法 | |
| JP2020195883A (ja) | 眼科検査装置 | |
| JP2018015021A (ja) | 眼科装置 | |
| JP2020130266A (ja) | 眼科装置 | |
| JP7394948B2 (ja) | 眼科装置 | |
| US20230218167A1 (en) | Ophthalmic apparatus | |
| JP7103813B2 (ja) | 眼科装置 | |
| US11963722B2 (en) | Methods and systems for determining change in eye position between successive eye measurements | |
| US20230218161A1 (en) | Ophthalmic apparatus | |
| US11759104B2 (en) | Scanning imaging apparatus, method of controlling the same, scanning imaging method, and recording medium |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| RD04 | Notification of resignation of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7424 Effective date: 20120125 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20120921 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20120921 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20130830 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20130910 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20131209 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20140225 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20140326 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 5512682 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |