JP5492315B2 - Combine - Google Patents
Combine Download PDFInfo
- Publication number
- JP5492315B2 JP5492315B2 JP2013016045A JP2013016045A JP5492315B2 JP 5492315 B2 JP5492315 B2 JP 5492315B2 JP 2013016045 A JP2013016045 A JP 2013016045A JP 2013016045 A JP2013016045 A JP 2013016045A JP 5492315 B2 JP5492315 B2 JP 5492315B2
- Authority
- JP
- Japan
- Prior art keywords
- input shaft
- shaft
- driving force
- engine
- machine body
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
- 230000005540 biological transmission Effects 0.000 claims description 115
- 230000002441 reversible effect Effects 0.000 claims description 91
- 238000005520 cutting process Methods 0.000 claims description 60
- 230000004308 accommodation Effects 0.000 claims 1
- 235000013339 cereals Nutrition 0.000 description 14
- 230000001105 regulatory effect Effects 0.000 description 7
- 238000005452 bending Methods 0.000 description 5
- 238000007781 pre-processing Methods 0.000 description 4
- 238000004519 manufacturing process Methods 0.000 description 3
- 240000004160 Capsicum annuum Species 0.000 description 2
- 235000008534 Capsicum annuum var annuum Nutrition 0.000 description 2
- 235000007862 Capsicum baccatum Nutrition 0.000 description 2
- 239000001728 capsicum frutescens Substances 0.000 description 2
- 238000010586 diagram Methods 0.000 description 2
- 238000012423 maintenance Methods 0.000 description 2
- 208000019300 CLIPPERS Diseases 0.000 description 1
- 240000007594 Oryza sativa Species 0.000 description 1
- 235000007164 Oryza sativa Nutrition 0.000 description 1
- 241000209140 Triticum Species 0.000 description 1
- 235000021307 Triticum Nutrition 0.000 description 1
- 208000021930 chronic lymphocytic inflammation with pontine perivascular enhancement responsive to steroids Diseases 0.000 description 1
- 238000006073 displacement reaction Methods 0.000 description 1
- 238000003306 harvesting Methods 0.000 description 1
- 230000002706 hydrostatic effect Effects 0.000 description 1
- 239000000463 material Substances 0.000 description 1
- 238000000034 method Methods 0.000 description 1
- 235000009566 rice Nutrition 0.000 description 1
- 238000005096 rolling process Methods 0.000 description 1
- 238000007790 scraping Methods 0.000 description 1
- 238000003860 storage Methods 0.000 description 1
- 238000009966 trimming Methods 0.000 description 1
Images









Landscapes
- Harvester Elements (AREA)
Description
本発明は、扱胴を備えた脱穀装置とエンジンとを走行機体に搭載し、前記脱穀装置の前部に刈取り部を設けたコンバインに関する。 The present invention relates to a combine in which a threshing device including a handling cylinder and an engine are mounted on a traveling machine body and a cutting portion is provided at a front portion of the threshing device.
この種のコンバインとして、従来、例えば特許文献1に記載されたものがあった。 Conventionally, for example, this type of combine is described in Patent Document 1.
本第1発明は、扱胴を備えた脱穀装置とエンジンと運転部とを走行機体に搭載し、前記脱穀装置の前部に刈取り部を設けたコンバインにおいて、
前記刈取り部に、刈取り穀稈を前記脱穀装置に供給するフィーダと、このフィーダを駆動する左右向きの刈取り入力軸とが設けられ、
前記エンジンからの駆動力が伝達される入力軸と、前記入力軸からの駆動力を前記扱胴に伝達する扱胴出力軸とが、前記脱穀装置の走行機体前方側に設けられ、
前記入力軸が走行機体左右向きに配置され、前記入力軸からの駆動力が前記刈取り入力軸に伝達されるよう構成され、
前記扱胴出力軸が走行機体前後向きに配置され、前記入力軸からの駆動力がベベルギヤ機構を介して前記扱胴出力軸に伝達されるよう構成され、
前記エンジンが前記脱穀装置の左右一側方で前記運転部の下方に配置され、かつ、前記脱穀装置の左右一側から左右他側に亘るカウンタ軸が、前記扱胴の下方を通って前記脱穀装置を左右方向に貫通するように設けられ、
前記入力軸が、前記カウンタ軸よりも上方、かつ、前記扱胴の前方に配置され、
前記エンジンからの駆動力が前記カウンタ軸における前記エンジンの側となる左右一端部に伝達され、前記カウンタ軸からの駆動力が前記カウンタ軸における前記エンジンとは反対側となる左右他端部から前記入力軸に伝達され、かつ、前記エンジンからの駆動力が前記カウンタ軸で分岐して、脱穀後の穀粒を搬送する搬送装置に伝達されるよう構成され、
前記カウンタ軸からの駆動力を前記入力軸に伝達する動力伝達機構が、前記入力軸からの駆動力を前記刈取り入力軸に伝達する動力伝達機構よりも、機体横外側に配置されている。
In the first aspect of the present invention, the threshing device including the handling cylinder, the engine, and the driving unit are mounted on the traveling machine body, and the harvester is provided at the front portion of the threshing device.
The mowing unit is provided with a feeder that supplies the threshing device to the threshing device, and a left and right mowing input shaft that drives the feeder,
An input shaft to which the driving force from the engine is transmitted, and a barrel output shaft that transmits the driving force from the input shaft to the barrel are provided on the front side of the traveling machine body of the threshing device,
The input shaft is arranged in the left-right direction of the traveling machine body, and the driving force from the input shaft is configured to be transmitted to the cutting input shaft.
The handling cylinder output shaft is arranged in the longitudinal direction of the traveling machine body, and the driving force from the input shaft is configured to be transmitted to the handling cylinder output shaft via a bevel gear mechanism .
The engine is disposed on the left and right sides of the threshing device below the operation unit, and a countershaft extending from the left and right sides of the threshing device to the other side of the threshing device passes below the handling cylinder and the threshing. Provided to penetrate the device in the left-right direction,
The input shaft is disposed above the counter shaft and in front of the handling cylinder,
The driving force from the engine is transmitted to the left and right ends of the counter shaft on the engine side, and the driving force from the counter shaft is transmitted from the other left and right ends of the counter shaft on the opposite side to the engine. It is configured to be transmitted to the input shaft, and the driving force from the engine is branched by the counter shaft and transmitted to a conveying device that conveys the grain after threshing,
The power transmission mechanism that transmits the driving force from the counter shaft to the input shaft is disposed on the laterally outer side of the machine body than the power transmission mechanism that transmits the driving force from the input shaft to the cutting input shaft .
本第2発明では、前記エンジンの出力軸よりも機体後方に前記カウンタ軸が位置し、かつ、前記カウンタ軸よりも機体前方に前記入力軸が位置している。
本第3発明では、前記カウンタ軸からの駆動力を前記入力軸に伝達する動力伝達機構は、前記カウンタからの駆動力を前記搬送装置に伝達する動力伝達機構よりも、機体横外側に配置されている。
本第4発明では、前記カウンタ軸は、前記脱穀装置の唐箕駆動軸である。
本第5発明では、前記入力軸と前記扱胴出力軸とを装備する伝動ケースが、前記脱穀装置の走行機体前方側に設けられている。
本第6発明では、前記伝動ケースは、前記脱穀装置の前壁部に支持されている。
本第7発明では、前記カウンタ軸からの駆動力を前記入力軸に伝達する動力伝達機構は、ベルト式の伝達機構で構成されている。
本第8発明では、正面視において、前記入力軸が前記刈取り入力軸よりも上方に配置されている。
本第9発明では、前記入力軸からの駆動力が前記刈取り入力軸に伝達される動力伝達経路に、前記入力軸からの駆動力を逆転可能な逆転機構が設けられている。
本第10発明では、前記入力軸と前記扱胴出力軸とを装備する伝動ケースが、前記脱穀装置の走行機体前方側に設けられ、
前記伝動ケースの走行機体左右方向での中間部に、前記扱胴出力軸が配置されている。
本第11発明では、前記入力軸と前記扱胴出力軸とを装備する伝動ケースが、前記脱穀装置の走行機体前方側に設けられ、
前記伝動ケースの走行機体左右方向での中間部に、前記べベルギヤ機構を収容する収容部が形成されている。
本第12発明では、前記収容部の前壁部が、前記伝動ケースのケース本体に、ボルトで着脱可能に構成されている。
In the second aspect of the invention, the counter shaft is located behind the output shaft of the engine, and the input shaft is located ahead of the body of the counter shaft.
In the third aspect of the invention, the power transmission mechanism that transmits the driving force from the counter shaft to the input shaft is disposed on the lateral outer side of the machine body than the power transmission mechanism that transmits the driving force from the counter to the transport device. ing.
In the fourth aspect of the invention, the counter shaft is a red pepper drive shaft of the threshing apparatus.
In this 5th invention, the transmission case equipped with the said input shaft and the said handling cylinder output shaft is provided in the traveling machine body front side of the said threshing apparatus.
In this 6th invention, the said transmission case is supported by the front wall part of the said threshing apparatus .
In the seventh aspect of the invention, the power transmission mechanism that transmits the driving force from the counter shaft to the input shaft is constituted by a belt-type transmission mechanism.
In the eighth aspect of the invention, the input shaft is disposed above the cutting input shaft in a front view.
In the ninth aspect of the present invention, a reversing mechanism capable of reversing the driving force from the input shaft is provided in a power transmission path through which the driving force from the input shaft is transmitted to the cutting input shaft.
In the tenth invention, a transmission case equipped with the input shaft and the barrel output shaft is provided on the front side of the traveling machine body of the threshing device,
The handling cylinder output shaft is disposed in an intermediate portion of the transmission case in the lateral direction of the traveling machine body.
In the eleventh aspect of the present invention, a transmission case equipped with the input shaft and the barrel output shaft is provided on the front side of the traveling machine body of the threshing device,
An accommodating portion for accommodating the bevel gear mechanism is formed at an intermediate portion of the transmission case in the lateral direction of the traveling machine body.
In the twelfth aspect of the invention, the front wall portion of the housing portion is configured to be detachable from the case main body of the transmission case with a bolt.
以下、本発明の実施例を図面に基づいて説明する。
図1は、本発明の実施例に係るコンバインの全体側面図である。図2は、本発明の実施例に係るコンバインの全体平面図である。これらの図に示すように、本発明の実施例に係るコンバインは、左右一対のクローラ走行装置1,1によって自走するよう構成し、かつ運転座席2が装備された運転部3を有した自走機体を備え、この自走機体の機体フレーム4の後部側に自走機体横方向に並べて設けた脱穀装置5と穀粒袋詰め部6とを備え、前記脱穀装置5の前部にフィーダ11が連結された刈取り部10を備えている。このコンバインは、稲、麦などの穀粒を収穫するものであり、次の如く構成してある。
Embodiments of the present invention will be described below with reference to the drawings.
FIG. 1 is an overall side view of a combine according to an embodiment of the present invention. FIG. 2 is an overall plan view of the combine according to the embodiment of the present invention. As shown in these drawings, a combine according to an embodiment of the present invention is configured to be self-propelled by a pair of left and right crawler traveling devices 1 and 1 and has a
前記刈取り部10は、前記フィーダ11を備える他、このフィーダ11の前端部に前処理フレーム12が連結された前処理装置13を備えて構成してある。
In addition to the
前記刈取り部10は、前記フィーダ11の脱穀装置5に対する上下揺動操作により、前処理フレーム12の下部に位置するプラットホーム14が地面付近に下降した下降作業状態と、前記プラットホーム14が地面から高く上昇した上昇非作業状態とに昇降する。刈取り部10を下降作業状態にして自走機体を走行させると、前記前処理装置13は、前処理フレーム12の前部に位置する左右一対のデバイダ15,15によって刈取り対象の植立穀稈と、非刈取り対象の植立穀稈とを分草し、刈取り対象の植立穀稈を刈取り装置16の上方に位置する回転リール17によって前処理フレーム12の後方側に掻き込みながらバリカン形の前記刈取り装置16によって刈取り処理し、刈取り穀稈を前記プラットホーム14の上面側に位置するオーガ18によってフィーダ11の前側に寄せ搬送し、フィーダ11の前側に位置した刈取り穀稈を前記オーガ18が一体回転自在に備えている掻き込み杆19によってフィーダ11の入り口(図示せず)に送り込む。フィーダ11は、これの内部に位置するフィーダコンベヤ11a(図3参照)によって前記掻き込み杆19からの刈取り穀稈をフィーダ11の後端部に搬送し、この後端部に位置する排出口(図示せず)から脱穀装置5の扱室(図示せず)に刈取り穀稈の株元から穂先までの全体を供給する。
The
前記脱穀装置5は、扱室に供給された刈取り穀稈を走行機体前後向きの軸芯周りに回動する扱胴5a(図3参照)によって脱穀処理し、脱穀処理物を脱穀粒と排ワラとに選別処理し、脱穀粒を前記穀粒袋詰め部6の袋詰めタンク6aに供給する。
The
図1,2に示すように、前記穀粒袋詰め部6は、前記袋詰めタンク6aを備える他、この袋詰めタンク6aの走行機体前後方向に並ぶ二つの穀粒吐出筒6bのそれぞれに対応させて袋詰めタンク6aの下方に設けた袋支持杆6cと、この袋支持杆6cの下方に配置して前記機体フレーム4に設けた袋受けデッキに兼用の作業デッキ6dと、前記機体フレーム4の横端部に支持された補助デッキ6eとを備えている。補助デッキ6eは、上下揺動自在に支持されており、機体フレーム4から走行機体横外側に水平に突出した下降使用姿勢と、この下降使用姿勢から上昇揺動して走行機体上下方向に沿った上昇格納姿勢とに切り換わる。
As shown in FIGS. 1 and 2, the grain
前記自走機体は、前記運転座席2の下方に設けたエンジン20を備えている。図3は、前記エンジン20の駆動力を前記走行装置1と前記脱穀装置5と前記刈取り部10とに伝達する伝動機構の線図である。この図に示すように、前記伝動機構の走行伝動部は、前記エンジン20の出力軸20aの駆動力を、ベルト伝動機構21を介して走行変速装置22の入力軸22aに伝達し、この走行変速装置22の出力軸22bの駆動力を、走行ミッション23に入力してこの走行ミッション23によって前記左右一対の走行装置1,1に伝達する。
The self-propelled aircraft includes an
前記走行変速装置22は、前記走行ミッション23のケースに連設されている。この走行変速装置22は、前記入力軸22aをポンプ軸として備えた可変容量形でアキシャルプランジャ形の油圧ポンプと、この油圧ポンプからの圧油によって駆動されるアキシャルプランジャ形の油圧モータとを備えて構成されている。すなわち、走行変速装置22は、静油圧式無段変速装置になっている。
The
前記伝動機構の作業伝動部は、前記エンジン20の出力軸20aをベルト伝動機構25を介して脱穀装置5の唐箕駆動軸26(本発明に係る「カウンタ軸」に相当)の一端側に連動させ、この唐箕駆動軸26の他端側をベルト伝動機構27(本発明に係る「カウンタ軸からの駆動力を搬送装置に伝達する動力伝達機構」に相当)を介して脱穀装置5の一番スクリューコンベヤ28(本発明に係る「搬送装置」に相当)と二番スクリューコンベヤ29(本発明に係る「搬送装置」に相当)とに連動させ、前記ベルト伝動機構27に設けた動力取り出し軸30をベルト伝動機構31を介して脱穀装置5の選別装置駆動軸32に連動させている。
The work transmission section of the transmission mechanism causes the
前記伝動機構の作業伝動部は、前記エンジン20の前記出力軸20aから出力される駆動力を、前記ベルト伝動機構25と前記唐箕駆動軸26とこの唐箕駆動軸26の他端側に設けたベルト伝動機構35(本発明に係る「カウンタ軸からの駆動力を入力軸に伝達する動力伝達機構」に相当)とを介して伝動ケース36のケース入力軸37(本発明に係る「入力軸」に相当)に伝達し、このケース入力軸37の駆動力を伝動ケース36の脱穀出力軸38から扱胴5aに伝達し、前記ケース入力軸37の駆動力を、正回転クラッチ40(本発明に係る「入力軸からの駆動力を刈取り入力軸に伝達する動力伝達機構」に相当)を介して、あるいは、伝動ケース36の刈取り出力軸39と、逆回転クラッチ41(本発明に係る「逆転機構」に相当)とを介して刈取り部10の刈取り入力軸42に伝達する。この動力伝達についてさらに詳述すると、次の如く構成してある。
The work transmission unit of the transmission mechanism is configured to provide a driving force output from the
すなわち、図2,4に示すように、前記伝動ケース36は、脱穀装置5の走行機体前方側で、かつ前記フィーダ11の後端部の上方に、脱穀装置5の前壁部に支持させて設けてある。図3に示すように、前記伝動ケース36は、前記扱胴出力軸38を伝動ケース36の走行機体横方向での中央部に走行機体前後向きに配置して備えている。前記伝動ケース36は、前記ケース入力軸37と前記刈取り出力軸39とを伝動ケース36の走行機体横方向での一端側と他端側とに分散した配置にして、かつ前記扱胴出力軸38を挟んで走行機体横方向に並んだ配置にして、さらにケース入力軸37も刈取り出力軸39も走行機体横向きになった配置にして備えている。前記扱胴出力軸38は、扱胴5aの回転支軸に一体回転自在に連結されている。
That is, as shown in FIGS. 2 and 4, the
前記伝動ケース36は、前記ケース入力軸37の端部に一体回転自在に設けたベベルギヤ43aを備えたベベルギヤ機構43を収容している。伝動ケース36の走行機体左右方向での中間部に、べベルギヤ機構43を収容する収容部36Aが形成されている。収容部36Aの前壁部36Bが、伝動ケース36のケース本体36Cに、ボルト36aで着脱可能に構成されている。このベベルギヤ機構43は、前記ベベルギヤ43aを備える他、前記刈取り出力軸39の端部に一体回転自在に設けたベベルギヤ43bと、前記ベベルギヤ43aと43bとに噛み合った状態で前記扱胴出力軸38に一体回転自在に設けたベベルギヤ43cとを備えて構成してある。つまり、ベベルギヤ機構43は、走行機体横向きのケース入力軸37と走行機体前後向きの脱穀出力軸38との連動を可能にし、かつケース入力軸37の回転方向と刈取り出力軸39の回転方向とが逆の回転方向になる状態でケース入力軸37と刈取り出力軸39とを連動させている。
The
図3,4に示すように、前記正回転クラッチ40は、前記ケース入力軸37と前記刈取り入力軸42の一端側とに巻回された伝動ベルト40aがテンション部材40bのテンション輪体40cによって張り状態と緩み状態とに切り換え操作されることで入り状態と切り状態とに切り換わるようベルトテンションクラッチになっている。テンション部材40は、前記伝動ケース36の端部に揺動自在に支持されている。この正回転クラッチ40は、入り状態に切り換え操作されることにより、ケース入力軸37の駆動力を刈取り入力軸42に刈取り部10を正回転方向に駆動する駆動力として伝達する。
As shown in FIGS. 3 and 4, in the forward rotation clutch 40, a
図3,4に示すように、前記逆回転クラッチ41は、前記刈取り出力軸39と前記刈取り入力軸42の他端側とに巻回された伝動ベルト41aがテンション部材41bのテンション輪体41cによって緊張状態と弛緩状態とに切り換え操作されることで入り状態と切り状態とに切り換わるようベルトテンションクラッチになっている。テンション部材41bは、前記伝動ケース36の端部に揺動自在に支持されている。この逆回転クラッチ41は、入り状態に切り換え操作されることにより、刈取り出力軸39の駆動力を刈取り入力軸42に刈取り部10を逆回転方向に駆動する駆動力として伝達する。
As shown in FIGS. 3 and 4, the
図3に示すように、前記刈取り入力軸42は、前記フィーダコンベヤ11aを駆動するコンベヤ駆動軸になっている。前記刈取り入力軸42は、伝動チェーン44を介して刈取り装置16の駆動軸45に連動されている。この駆動軸45と、前記オーガ18の駆動軸46とが伝動チェーン47によって連動されている。オーガ18の駆動軸46と、回転リール17の駆動軸48とが、伝動チェーン49と伝動ベルト50とを利用した連動機構によって連動されている。
As shown in FIG. 3, the cutting
刈取り入力軸42は、正回転方向の駆動力が伝達されると、刈取り部10のフィーダコンベア11aとオーガ18と刈取り装置16と回転リール17とを通常の前処理作業や搬送作業を行うよう正回転方向に駆動し、逆回転方向の駆動力が伝達されると、刈取り部10のフィーダコンベア11aとオーガ18と刈取り装置16と回転リール17とを通常の作業用回転方向とは逆の回転方向に駆動する。
When the driving force in the forward rotation direction is transmitted, the reaping
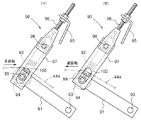
図4は、前記正回転クラッチ40と前記逆回転クラッチ41との切り換え操作、および前記エンジン20の調速操作を行うよう前記運転部3に設けた操作部の正面視での構造を示している。図6は、前記操作部の斜視図である。これらの図と図2とに示すように、前記操作部は、前記運転座席2の横側方に設けた操作盤51と、この操作盤51に走行機体横方向に並べて設けたレバー形の正転クラッチ操作具52とレバー形のアクセル操作具53と、前記操作盤51の運転座席側とは反対側の横外側に設けたレバー形の逆転クラッチ操作具54とを備えている。
FIG. 4 shows a structure in a front view of an operation unit provided in the
前記正転クラッチ操作具52は、この操作具52の基部に一体回転自在に連結した回転支軸55を介して支持部材56に支持されており、前記回転支軸55の走行機体横向き軸芯のまわりに揺動する。前記支持部材56は、操作盤51の裏面側に取り付けられている。この正転クラッチ操作具52は、前記回転支軸55の正転クラッチ操作具52が連結している側とは反対側の端部に一体回転自在に設けた揺動アーム61を備えた連動機構60により、正回転クラッチ40のテンション部材40bに連動されている。
The forward rotation
図6,7に示すように、前記連動機構60は、前記揺動アーム61を備える他、この揺動アーム61の遊端部に連結ピン62を介して一端部が相対回転自在に連結された揺動リンク63と、この揺動リンク63の他端部を正回転クラッチ40のテンション部材40bにインナーケーブルによって連動させている操作ケーブル64とを備えて構成してある。
As shown in FIGS. 6 and 7, the
図7は、正転クラッチ操作具52の入り位置「入り」への操作状態を示している。この図に示すように、正転クラッチ操作具52を回転支軸55の走行機体横向きの軸芯まわりに操作盤51のガイド溝51a(図4参照)に沿わせて走行機体前後方向に揺動操作してガイド溝51aの前端側に位置させると、正転クラッチ操作具52が入り位置「入り」になる。すると、正転クラッチ操作具52は、揺動アーム61を上昇揺動操作して揺動リンク63を引き上げ操作する。これにより、操作ケーブル64のインナーケーブルが引っ張り操作されてテンション部材40bを伝動ベルト40aに押圧作用するよう揺動操作し、伝動ベルト40aが張り状態になって正回転クラッチ40が入り状態になる。
FIG. 7 shows an operation state of the forward rotation
図8は、正転クラッチ操作具52の切り位置「切り」への操作状態を示している。この図に示すように、正転クラッチ操作具52を前記ガイド溝51aの後端側に位置させると、正転クラッチ操作具52が切り位置「切り」になる。すると、正転クラッチ操作具52は、揺動アーム61を下降揺動操作して揺動リンク63を下げ操作する。これにより、操作ケーブル64のインナーケーブルが緩め操作されてテンション部材40bを伝動ベルト40aの押圧を解除するよう揺動操作し、伝動ベルト40aが緩み状態になって正回転クラッチ40が切り状態になる。
FIG. 8 shows the operating state of the forward clutch operating
図4,6,7に示すように、前記逆転クラッチ操作具41は、逆回転クラッチ41のテンション部材41bに連結されており、このテンション部材41bを介して前記伝動ケース36の端部に揺動自在に支持されている。
As shown in FIGS. 4, 6, and 7, the reverse
図8は、逆転クラッチ操作具41の入り位置「入り」への操作状態を示している。この図に示すように、逆転クラッチ操作具41を前記刈取り出力軸39の走行機体横向きの軸芯まわりに上昇揺動操作すると、逆転クラッチ操作具41が入り位置「入り」になる。すると、逆転クラッチ操作具41は、テンション部材41bを入り側に揺動操作する。これにより、テンションローラ41cが伝動ベルト41aを張り操作し、逆回転クラッチ41が入り状態になる。このとき、逆回転クラッチ41は、逆転クラッチ操作具41が入り位置「入り」に人為操作によって維持されることにより、入り状態を維持する。
FIG. 8 shows the operating state of the reverse
図7は、逆転クラッチ操作具54の切り位置「切り」への操作状態を示している。この図に示すように、逆転クラッチ操作具54の入り位置「入り」への維持操作を解除すると、逆転クラッチ操作具54が自然に下降揺動して切り位置「切り」になる。すると、逆転クラッチ操作具54は、テンション部材41bを切り側に揺動操作する。これにより、テンションローラ41eが伝動ベルト41aの張り操作を解除し、伝動ベルト41aが緩み状態になって逆回転クラッチ41が切り状態になる。
FIG. 7 shows an operation state of the reverse
図4に示すように、前記アクセル操作具53は、これの基端側を挿通した支軸57を介して支持部材58に支持されており、支軸57の走行機体横向きの軸芯まわりに揺動する。支持部材58は、操作盤51の裏面側に取り付けられている。このアクセル操作具53は、アクセル操作具53の基端部にインナーケーブルの一端側が連結された操作ケーブル(図示せず)によってエンジン20のアクセル装置(図示せず)に連動されている。
As shown in FIG. 4, the
図7は、アクセル操作具53の高速位置「高」への操作状態を示している。この図に示すように、アクセル操作具53を支軸57の走行機体横向き軸芯のまわりに操作盤51のガイド溝51b(図4参照)に沿わせて揺動操作してガイド溝51bの後端側に位置させる。すると、アクセル操作具53は、高速位置「高」になってアクセル装置を高速状態に操作する。これにより、エンジン20が作業用に設定した高回転数で回転する作業用高速状態になる。
FIG. 7 shows the operating state of the
図8は、アクセル操作具53の低速位置「低」への操作状態を示している。この図に示すように、アクセル操作具53を前記ガイド溝51bの前端側に位置させる。すると、アクセル操作具53は、低速位置「低」になってアクセル装置を低速状態に操作する。これにより、エンジン20が刈取り部10の逆転駆動用に設定した低回転数で回転する非作業用低速状態になる。
FIG. 8 shows the operating state of the
図4,6,7に示すように、前記操作部は、前記揺動アーム61に一端側が連結した帯板材によって構成された牽制体71を有した牽制機構70と、前記アクセル操作具53に連結した屈曲杆体によって構成された高速逆転牽制体81を有した高速逆転牽制機構80とを備えている。
As shown in FIGS. 4, 6, and 7, the operation unit is connected to the
前記牽制機構70は、前記牽制体71を備える他、前記テンション部材41bから前記操作盤51の上面側に向かって延出した屈曲杆72によって構成した当たり部73を備えて構成してある。
The
牽制体71は、前記揺動アーム61に連結した帯板材で構成してあることにより、揺動アーム61と回転支軸55とを介して正転クラッチ操作具52に支持されており、正転クラッチ操作具52と一体移動する。当たり部73は、逆転クラッチ操作具54が連結しているテンション部材41bから延出した屈曲杆72によって構成してあることにより、逆転クラッチ操作具54と一体移動するよう逆転クラッチ操作具54に設けた状態になっている。
Since the
図7は、牽制機構70の作用状態での側面図である。この図に示すように、正転クラッチ操作具52が入り位置「入り」に操作されると、牽制体71が揺動アーム61によって操作盤51の配置高さと同じ配置高さに上昇操作される。すると、牽制体71は、帯板材の端部で成る牽制作用部71aが前記当たり部73の移動経路に入り込んだ作用位置になる。これにより、牽制体71は、逆転クラッチ操作具54を切り位置「切り」から入り位置「入り」に切り換え操作しようとすると、前記牽制作用部71aと前記当たり部73との当接によって逆転クラッチ操作具54の入り位置「入り」への移動を不能にする。
FIG. 7 is a side view of the
つまり、牽制機構70は、正回転クラッチ40が入り状態にあると、牽制体71の牽制作用部71aと、逆転クラッチ操作具54が備える当たり部73との当接によって逆転クラッチ操作具54の入り位置「入り」への切り換わりを牽制し、これによって逆回転クラッチ41の入り状態への切り換わりを牽制するよう作用状態になる。
That is, when the forward rotation clutch 40 is in the engaged state, the
図8は、牽制機構70の解除状態での側面図である。この図に示すように、正転クラッチ操作具52が切り位置「切り」に操作されると、牽制体71が揺動アーム61によって操作盤51の配置高さよりも低い位置に下げ操作される。すると、牽制体71は、前記当たり部73の移動経路からこれの外部に退避した解除位置になり、逆転クラッチ操作具54が切り位置「切り」から入り位置「入り」に切り換え操作される際の前記当たり部73と前記牽制作用部71aとの当接を回避する。
FIG. 8 is a side view of the
つまり、牽制機構70は、正回転クラッチ40が切り状態にあると、逆転クラッチ操作具54の入り位置「入り」への切り換え牽制を解除し、これによって逆回転クラッチ41の入り状態への切り換わり牽制を解除するよう解除状態になる。
In other words, when the forward rotation clutch 40 is in the disconnected state, the
前記高速逆転牽制機構80は、前記高速逆転牽制体81を備える他、前記屈曲杆72によって構成した当たり部82を備えて構成してある。
The high-speed reverse
高速逆転牽制体81は、アクセル操作具53に連結した屈曲杆で構成してあることにより、アクセル操作具53に支持されており、アクセル操作具53と一体移動する。当たり部82は、逆転クラッチ操作具54が連結しているテンション部材41bから延出した屈曲杆72によって構成してあることにより、逆転クラッチ操作具54と一体移動するよう逆転クラッチ操作具54に設けた状態になっている。高速逆転牽制体81は、これを構成する屈曲杆体の屈曲部で成る牽制作用部83を備えている。この高速逆転牽制体81は、アクセル操作具53に連結している部位と前記牽制作用部83との間に位置する部位で、前記操作盤51に支持されたホルダー84に移動自在に維持されている。ホルダ−84は、前記操作盤51に支持されている。
The high-speed reverse
図7は、高速逆転牽制機構80の作用状態での側面図である。この図に示すように、アクセル操作具53が高速位置「高」に操作されると、高速逆転牽制体81がアクセル操作具53によって走行機体後方側に移動操作される。すると、高速逆転牽制体81は、作用位置になり、逆転クラッチ操作具54を切り位置「切り」から入り位置「入り」に切り換え操作しようとすると、前記牽制作用部83と前記当たり部82との当接によって逆転クラッチ操作具54の入り位置「入り」への移動に抵抗を付与する。
FIG. 7 is a side view of the high speed reverse
つまり、高速逆転牽制機構80は、エンジン20が作業用高速状態にあると、高速逆転牽制体81の牽制作用部83と、逆転クラッチ操作具54が備える当たり部82との当接によって逆転クラッチ操作具54を入り位置「入り」に移動しにくくし、これによって逆回転クラッチ41の入り状態への切り換わりを牽制するよう作用状態になる。
That is, when the
図8は、高速逆転牽制機構80の解除状態での側面図である。この図に示すように、アクセル操作具53が低速位置「低」に操作されると、高速逆転牽制体81がアクセル操作具53によって走行機体前方側に移動操作される。すると、高速逆転牽制体81は、解除位置になり、逆転クラッチ操作具54が切り位置「切り」から入り位置「入り」に切り換え操作される際の高速逆転牽制体81の牽制作用部83と逆転クラッチ操作具54の当たり部82との当接を回避する。
FIG. 8 is a side view of the high speed reverse
つまり、高速逆転牽制機構80は、エンジン20が非作業用低速状態にあると、逆転クラッチ操作具54の入り位置「入り」への切り換え牽制を解除し、これによって逆回転クラッチ41の入り状態への切り換わり牽制を解除するよう解除状態になる。
That is, when the
つまり、作業を行う場合、アクセル操作具53を高速位置「高」に操作し、逆転クラッチ操作具54を切り位置「切り」に操作し、正転クラッチ操作具52を入り位置「入り」に操作する。すると、エンジン20が作業用高速状態で回転し、エンジン20の出力軸20aからの駆動力がベルト伝動機構25と唐箕駆動軸26とベルト伝動機構35とを介して伝動ケース36のケース入力軸37に伝達されてこのケース入力軸37が駆動され、このケース入力軸37の駆動力がベベルギヤ機構43を介して刈取り出力軸39に伝達されてこの刈取り出力軸39がケース入力軸37の回転方向とは逆の回転方向に駆動される。正回転クラッチ40が入り状態になってケース入力軸37の駆動力が正回転クラッチ40によって刈取り入力軸42に伝達され、逆回転クラッチ41が切り状態になって刈取り出力軸39の駆動力が刈取り入力軸42に伝達されず、刈取り入力軸42が正回転方向に作業用回転速度で駆動される。この刈取り入力軸42の駆動力がフィーダコンベヤ11の搬送終端側に直接に、伝動チェーン44を介して刈り取り装置16の駆動軸45に、伝動チェーン44と伝動チェーン47とを介してオーガ18の駆動軸46に、伝動チェーン44と伝動チェーン47と伝動ベルト50とを介して回転リール17の駆動軸48にそれぞれ伝達され、フィーダコンベヤ11a、オーガ18、刈取り装置16、回転リール17が正回転方向に作業に適切な回転速度で駆動される。
In other words, when performing work, the
刈取り部10に穀稈詰まりが発生した場合、アクセル操作具53を低速位置「低」に切り換え操作し、正転クラッチ操作具52を切り位置「切り」に切り換え操作し、逆転クラッチ操作具54を入り位置「入り」に切り換え操作する。このとき、アクセル操作具53の低速位置「低」への切り換え操作を行って高速逆転牽制機構80による逆転クラッチ41の切り換え牽制を解除し、かつ正転クラッチ操作具52の切り位置「切り」への切り換え操作を行って牽制機構70による逆回転クラッチ41の切り換え牽制を解除した後に逆転クラッチ操作具54を入り位置「入り」に切り換え操作する。
When the cereal clogging occurs in the
すると、エンジン20が非作業用低速状態で回転し、エンジン20の出力軸20aからの駆動力がベルト伝動機構25と唐箕駆動軸26とベルト伝動機構35とを介して伝動ケース36のケース入力軸37に伝達され、このケース入力軸37の駆動力がベベルギヤ機構43を介して刈取り出力軸39に伝達されて、この刈取り出力軸39がケース入力軸37の回転方向とは逆の回転方向に駆動される。正回転クラッチ40が切り状態になってケース入力軸37の駆動力が刈取り入力軸42に伝達されず、逆回転クラッチ41が入り状態になって刈取り出力軸39の駆動力が逆回転クラッチ41によって刈取り入力軸42に伝達され、刈取り入力軸42が逆回転方向に非作業用回転速度で駆動される。この刈取り入力軸42の駆動力がフィーダコンベヤ11の搬送終端側に直接に、伝動チェーン44を介して刈り取り装置16の駆動軸45に、伝動チェーン44と伝動チェーン47とを介してオーガ18の駆動軸46に、伝動チェーン44と伝動チェーン47と伝動ベルト50とを介して回転リール17の駆動軸48にそれぞれ伝達され、フィーダコンベヤ11a、オーガ18、刈取り装置16、回転リール17が逆回転方向に詰まり解消に適切な回転速度で駆動され、穀稈詰まりの解消が容易となる。このとき、逆転クラッチ操作具54を入り位置「入り」に人為的に維持操作している間だけ、逆回転クラッチ41が入り状態になって刈取り部10が逆転駆動され、逆転クラッチ操作具54の入り位置「入り」への維持操作を解除すれば、逆転クラッチ操作具54が自然に切り位置「切り」に切り換わり、逆回転クラッチ41が切り状態になって刈取り部10の逆転駆動が停止する。
Then, the
図5は、前記伝動チェーン44を有したチェーン伝動機構の側面図である。この図に示すように、前記チェーン伝動機構は、前記伝動チェーン44が案内されるよう巻回されたガイド輪体89を備え、前記フィーダ11の横側壁部11bに支持されたテンションアーム91を有したチェーン緊張機構90を備えている。
FIG. 5 is a side view of a chain transmission mechanism having the
図5,10に示すように、前記チェーン緊張機構90は、前記テンションアーム91を備える他、このテンションアーム91に連結されたスプリング92を備えて構成してあり、前記スプリング92によってテンションアーム91を支軸93のまわりに揺動付勢し、これによってテンションアーム91が備える遊転自在なテンション輪体94を伝動チェーン44に押圧付勢することにより、伝動チェーン44に緊張力を付与している。
As shown in FIGS. 5 and 10, the
前記スプリング92のテンションアーム91に連結している側とは反対側は、前記フィーダ11の横側壁部11bにブラケット95を介して支持されたスプリング支持杆96に連結されている。前記テンション輪体94は、前記伝動チェーン44のうち、刈取り部10の正転駆動時に緩み側となる部位44aに作用している。前記テンションアーム91は、このテンションアーム91と前記スプリング支持杆96とにわたって取り付けた緊張規制体97を備えている。
The side of the
図9,10に示すように、前記緊張規制体97と前記スプリング支持杆96とは、連結ピン98を介して相対回動自在に連結している。前記緊張規制体97と前記テンションアーム91とは、前記テンション輪体94を遊転自在に支持する支軸99によって連結している。前記支軸99は、緊張規制体97に設けた規制長孔100を摺動自在に挿通している。
As shown in FIGS. 9 and 10, the
図9(イ)は、刈取り部10が正転駆動された場合でのテンション輪体94のチェーン緊張操作状態を示す。この図に示すように、刈取り部10が正転駆動された場合、伝動チェーン44のテンション輪体94が作用する部位44aが緩み側になる。すると、テンション輪体94は、スプリング92による引っ張り操作によってチェーン部位44aを張り操作する。
FIG. 9A shows a chain tensioning operation state of the
図9(ロ)は、刈取り部10が逆転駆動された場合の緊張規制体97の作用状態を示す。この図に示すように、刈取り部10が逆転駆動された場合、緊張規制体97は、テンション輪体94のスプリング92に抗して移動を規制する。これにより、刈取り部10の逆転駆動のために伝動チェーン44の緩み側となる部位44bがガイド林体9から外れにくくなる。
FIG. 9 (b) shows the operating state of the
つまり、伝動チェーン44のテンション輪体94が作用する部位44aが張り側となると、この張り力のためにテンション輪体94がスプリング92に抗して移動操作される。すると、緊張規制体97は、テンション輪体94のスプリング92に抗して移動を規制するよう支軸99を介してテンション輪体94を支持する。この結果、緊張規制体97は、刈取り部10の逆転駆動のために伝動チェーン44の緩み側となる部位44bにガイド輪体89から外れるような大幅な緩みが発生しないようこの部位44bの緩み代を抑制する。
That is, when the
3 運転部
5 脱穀装置
5a 扱胴
10 刈取り部
11 フィーダ
20 エンジン
26 唐箕駆動軸(カウンタ軸)
27 ベルト伝動機構(カウンタ軸からの駆動力を搬送装置に伝達する動力伝達機構)
28 一番スクリューコンベヤ(搬送装置)
29 二番スクリューコンベヤ(搬送装置)
35 ベルト伝動機構(カウンタ軸からの駆動力を入力軸に伝達する動力伝達機構)
36 伝動ケース
36A 収容部
36B 前壁部
36C ケース本体
36a ボルト
37 ケース入力軸(入力軸)
38 扱胴出力軸
40 正回転クラッチ(入力軸からの駆動力を刈取り入力軸に伝達する動力伝達機構)
41 逆回転クラッチ(逆転機構)
42 刈取り入力軸
43 べベルギヤ機構
3 Driving
27 Belt transmission mechanism (power transmission mechanism that transmits the driving force from the counter shaft to the conveying device)
28 No. 1 screw conveyor (conveyor)
29 No. 2 screw conveyor (transport device)
35 Belt transmission mechanism (power transmission mechanism that transmits the driving force from the counter shaft to the input shaft)
36
38
41 Reverse rotation clutch (reverse rotation mechanism)
42
Claims (12)
前記刈取り部に、刈取り穀稈を前記脱穀装置に供給するフィーダと、このフィーダを駆動する左右向きの刈取り入力軸とが設けられ、
前記エンジンからの駆動力が伝達される入力軸と、前記入力軸からの駆動力を前記扱胴に伝達する扱胴出力軸とが、前記脱穀装置の走行機体前方側に設けられ、
前記入力軸が走行機体左右向きに配置され、前記入力軸からの駆動力が前記刈取り入力軸に伝達されるよう構成され、
前記扱胴出力軸が走行機体前後向きに配置され、前記入力軸からの駆動力がベベルギヤ機構を介して前記扱胴出力軸に伝達されるよう構成され、
前記エンジンが前記脱穀装置の左右一側方で前記運転部の下方に配置され、かつ、前記脱穀装置の左右一側から左右他側に亘るカウンタ軸が、前記扱胴の下方を通って前記脱穀装置を左右方向に貫通するように設けられ、
前記入力軸が、前記カウンタ軸よりも上方、かつ、前記扱胴の前方に配置され、
前記エンジンからの駆動力が前記カウンタ軸における前記エンジンの側となる左右一端部に伝達され、前記カウンタ軸からの駆動力が前記カウンタ軸における前記エンジンとは反対側となる左右他端部から前記入力軸に伝達され、かつ、前記エンジンからの駆動力が前記カウンタ軸で分岐して、脱穀後の穀粒を搬送する搬送装置に伝達されるよう構成され、
前記カウンタ軸からの駆動力を前記入力軸に伝達する動力伝達機構が、前記入力軸からの駆動力を前記刈取り入力軸に伝達する動力伝達機構よりも、機体横外側に配置されているコンバイン。 In a combine equipped with a threshing device, an engine, and a driving unit provided with a handling cylinder in a traveling machine body, and provided with a cutting part at the front of the threshing device,
The mowing unit is provided with a feeder that supplies the threshing device to the threshing device, and a left and right mowing input shaft that drives the feeder,
An input shaft to which the driving force from the engine is transmitted, and a barrel output shaft that transmits the driving force from the input shaft to the barrel are provided on the front side of the traveling machine body of the threshing device,
The input shaft is arranged in the left-right direction of the traveling machine body, and the driving force from the input shaft is configured to be transmitted to the cutting input shaft.
The handling cylinder output shaft is arranged in the longitudinal direction of the traveling machine body, and the driving force from the input shaft is configured to be transmitted to the handling cylinder output shaft via a bevel gear mechanism .
The engine is disposed on the left and right sides of the threshing device below the operation unit, and a countershaft extending from the left and right sides of the threshing device to the left and right sides passes through the lower portion of the handling cylinder and the threshing. Provided to penetrate the device in the left-right direction,
The input shaft is disposed above the counter shaft and in front of the handling cylinder,
The driving force from the engine is transmitted to the left and right ends of the counter shaft on the engine side, and the driving force from the counter shaft is transmitted from the other left and right ends of the counter shaft on the opposite side to the engine. It is configured to be transmitted to the input shaft, and the driving force from the engine is branched by the counter shaft and transmitted to a conveying device that conveys the grain after threshing,
The combine in which the power transmission mechanism that transmits the driving force from the counter shaft to the input shaft is arranged on the laterally outer side of the body than the power transmission mechanism that transmits the driving force from the input shaft to the cutting input shaft .
前記伝動ケースの走行機体左右方向での中間部に、前記扱胴出力軸が配置されている請求項1から9までの何れか一項に記載のコンバイン。 A transmission case equipped with the input shaft and the barrel output shaft is provided on the front side of the traveling machine body of the threshing device,
The combine according to any one of claims 1 to 9 , wherein the handling cylinder output shaft is disposed at an intermediate portion of the transmission case in the lateral direction of the traveling machine body.
前記伝動ケースの走行機体左右方向での中間部に、前記べベルギヤ機構を収容する収容部が形成されている請求項1から10までの何れか一項に記載のコンバイン。 A transmission case equipped with the input shaft and the barrel output shaft is provided on the front side of the traveling machine body of the threshing device,
The combine according to any one of claims 1 to 10 , wherein an accommodation portion for accommodating the bevel gear mechanism is formed in an intermediate portion of the transmission case in the lateral direction of the traveling machine body.
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2013016045A JP5492315B2 (en) | 2013-01-30 | 2013-01-30 | Combine |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2013016045A JP5492315B2 (en) | 2013-01-30 | 2013-01-30 | Combine |
Related Parent Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2012003927A Division JP2012090641A (en) | 2012-01-12 | 2012-01-12 | Combine harvester |
Related Child Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2014038488A Division JP5681821B2 (en) | 2014-02-28 | 2014-02-28 | Combine |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2013099354A JP2013099354A (en) | 2013-05-23 |
| JP2013099354A5 JP2013099354A5 (en) | 2013-07-04 |
| JP5492315B2 true JP5492315B2 (en) | 2014-05-14 |
Family
ID=48620666
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2013016045A Active JP5492315B2 (en) | 2013-01-30 | 2013-01-30 | Combine |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP5492315B2 (en) |
Family Cites Families (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP3434969B2 (en) * | 1996-04-26 | 2003-08-11 | 株式会社クボタ | Whole culm type combine |
| JPH11187757A (en) * | 1997-12-26 | 1999-07-13 | Kubota Corp | Threshing cylinder driving structure for thresher |
| JP3435057B2 (en) * | 1998-03-20 | 2003-08-11 | 株式会社クボタ | Whole culm type combine |
| JP2002186329A (en) * | 2000-12-20 | 2002-07-02 | Yanmar Agricult Equip Co Ltd | Combine harvester |
-
2013
- 2013-01-30 JP JP2013016045A patent/JP5492315B2/en active Active
Also Published As
| Publication number | Publication date |
|---|---|
| JP2013099354A (en) | 2013-05-23 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5002042B2 (en) | Combine | |
| JP4713535B2 (en) | Combine | |
| JP2010239980A5 (en) | ||
| JP4713536B2 (en) | Combine | |
| JP5681821B2 (en) | Combine | |
| JP2012213342A (en) | Normal type combine harvester | |
| JP5155789B2 (en) | Normal combine | |
| JP2017221220A5 (en) | ||
| JP6949073B2 (en) | combine | |
| JP2019122407A5 (en) | ||
| JP5492315B2 (en) | Combine | |
| JP2017221220A (en) | Combine harvester | |
| JP6211129B2 (en) | Combine | |
| JP5917724B2 (en) | Combine | |
| JP2012090641A (en) | Combine harvester | |
| JP2013099354A5 (en) | ||
| JP2013059283A (en) | Combine harvester | |
| US1815274A (en) | Combination tractor harvester | |
| CN104394682B (en) | United reaper | |
| JP4816235B2 (en) | Combine | |
| JP7157938B1 (en) | combine | |
| JP5735385B2 (en) | Combine | |
| JP5330781B2 (en) | Normal combine | |
| WO2015178100A1 (en) | Combine harvester | |
| JP6192589B2 (en) | Combine |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20130301 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20130426 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20130620 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20130816 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20140130 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20140228 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 5492315 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |