JP5448472B2 - ハイブリッド型作業機械 - Google Patents
ハイブリッド型作業機械 Download PDFInfo
- Publication number
- JP5448472B2 JP5448472B2 JP2009016133A JP2009016133A JP5448472B2 JP 5448472 B2 JP5448472 B2 JP 5448472B2 JP 2009016133 A JP2009016133 A JP 2009016133A JP 2009016133 A JP2009016133 A JP 2009016133A JP 5448472 B2 JP5448472 B2 JP 5448472B2
- Authority
- JP
- Japan
- Prior art keywords
- capacitor
- temperature
- limit value
- electric motor
- motor
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
Images






Landscapes
- Operation Control Of Excavators (AREA)
- Charge And Discharge Circuits For Batteries Or The Like (AREA)
Description
電力の供給によって駆動される力行動作、及び電力を発生する回生動作を行う第1の電動機と、
前記第1の電動機の出力を制御する第1の電気回路と、
前記第1の電動機に電力を供給し、及び前記第1の電動機からの回生電力を蓄電するキャパシタと、
前記キャパシタの充放電電流を制御するキャパシタ充放電回路と、
前記キャパシタの温度を検出する温度検出器と、
電気以外の燃料によって駆動力を発生するエンジンと、
前記エンジンによって駆動されて発電し、発電された電力によって前記キャパシタを充電する第2の電動機と、
前記温度検出器で検出された温度データが入力され、前記温度検出器で検出された温度が第1の基準温度以上になったとき、前記キャパシタの充電電流及び放電電流が、通常時の制限値である第1の制限値よりも小さい第2の制限値を超えないように、前記キャパシタ充放電回路を制御する制御装置と
を有するハイブリッド型作業機械が提供される。
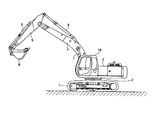
1A、1B 油圧モータ
2 旋回機構
3 上部旋回体
4 ブーム
5 アーム
6 バケット
7 ブームシリンダ
8 アームシリンダ
9 バケットシリンダ
10 キャビン
11 エンジン
12 電動発電機(第2の電動機)
13 減速機
14 メインポンプ
15 パイロットポンプ
16 高圧油圧ライン
17 コントロールバルブ
18 インバータ(第2の電気回路)
19 キャパシタ
20 インバータ(第1の電気回路)
21 旋回用電動機(第1の電動機)
22 レゾルバ
23 メカニカルブレーキ
24 減速機
25 パイロットライン
26 操作装置
27、28 油圧ライン
29 圧力センサ
30 制御装置
35 表示装置
36 温度検出器
100 コンバータ(キャパシタ充放電回路)
101 リアクトル
102A 昇圧用IGBT
102B 降圧用IGBT
102a、102b ダイオード
103A、103B 電源接続端子
104A、104B 出力端子
105 平滑用コンデンサ
106 電圧計
107 電流計
111 電圧計
Claims (6)
- 電力の供給によって駆動される力行動作、及び電力を発生する回生動作を行う第1の電動機と、
前記第1の電動機の出力を制御する第1の電気回路と、
前記第1の電動機に電力を供給し、及び前記第1の電動機からの回生電力を蓄電するキャパシタと、
前記キャパシタの充放電電流を制御するキャパシタ充放電回路と、
前記キャパシタの温度を検出する温度検出器と、
電気以外の燃料によって駆動力を発生するエンジンと、
前記エンジンによって駆動されて発電し、発電された電力によって前記キャパシタを充電する第2の電動機と、
前記温度検出器で検出された温度データが入力され、前記温度検出器で検出された温度が第1の基準温度以上になったとき、前記キャパシタの充電電流及び放電電流が、通常時の制限値である第1の制限値よりも小さい第2の制限値を超えないように、前記キャパシタ充放電回路を制御する制御装置と
を有し、
前記制御装置は、前記温度検出器で検出された温度が前記第1の基準温度以上になったとき、さらに、前記第1の電動機の出力が、通常時の制限値である第3の制限値よりも小さい第4の制限値を超えないように前記第1の電気回路を制御するハイブリッド型作業機械。 - さらに、
基体と、
前記基体に対して旋回可能に取り付けられた旋回体と
を有し、
前記第1の電動機は、前記旋回体を旋回させる回転駆動力を発生する請求項1に記載のハイブリッド型作業機械。 - 前記制御装置は、前記温度検出器で検出された温度が、前記第1の基準温度よりも低い
第1の回復温度以下になったとき、前記キャパシタの充電電流及び放電電流の制限値を通常時の値に戻して、前記キャパシタ充放電回路を制御する請求項1または2に記載のハイブリッド型作業機械。 - 前記制御装置は、前記温度検出器で検出された温度が、前記第1の基準温度よりも高い第2の基準温度以上になったとき、前記キャパシタへの充電及び前記キャパシタからの強制的な放電を停止させるように前記キャパシタ充放電回路を制御する請求項1乃至3のいずれか1項に記載のハイブリッド型作業機械。
- 前記制御装置は、前記温度検出器で検出された温度が、前記第1の基準温度よりも低い第3の基準温度以下になったことを検出すると、前記キャパシタの充電電流及び放電電流が、通常時の制限値である第5の制限値よりも小さい第6の制限値を超えないように、前記キャパシタ充放電回路を制御し、かつ前記第1の電動機の出力が、通常時の制限値である第7の制限値よりも小さい第8の制限値を超えないように、前記第1の電気回路を制御する請求項1乃至4のいずれか1項に記載のハイブリッド型作業機械。
- 前記第2の電動機は、前記エンジンの駆動軸に機械的に接続され、かつ前記キャパシタに電気的に接続され、前記エンジンによって駆動されて発電を行う発電動作、及び、前記キャパシタから電力を供給されることによって機械的駆動力を発生して前記エンジンの駆動力を補助するアシスト動作を行い、
さらに、前記第2の電動機へ電力を供給する状態と、該第2の電動機から発電電力を取り出す状態とを切り替える第2の電気回路を有し、
前記制御装置は、前記温度検出器で検出された温度が前記第3の基準温度以下になったときに、前記第2の電動機が発電動作とアシスト動作とを交互に繰り返すように前記第2の電気回路を制御する請求項5に記載のハイブリッド型作業機械。
Priority Applications (6)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2009016133A JP5448472B2 (ja) | 2009-01-28 | 2009-01-28 | ハイブリッド型作業機械 |
| CN201080005702.9A CN102301561B (zh) | 2009-01-28 | 2010-01-27 | 混合式工作机械及蓄电控制装置 |
| PCT/JP2010/051027 WO2010087363A1 (ja) | 2009-01-28 | 2010-01-27 | ハイブリッド型作業機械及び蓄電制御装置 |
| EP10735829.3A EP2383862A4 (en) | 2009-01-28 | 2010-01-27 | Hybrid working machine and electricity storage control apparatus |
| KR1020117017648A KR101307198B1 (ko) | 2009-01-28 | 2010-01-27 | 하이브리드형 작업기계 및 축전제어장치 |
| US13/144,216 US9000716B2 (en) | 2009-01-28 | 2010-01-27 | Hybrid working machine and electric power accumulation controller |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2009016133A JP5448472B2 (ja) | 2009-01-28 | 2009-01-28 | ハイブリッド型作業機械 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2010178446A JP2010178446A (ja) | 2010-08-12 |
| JP5448472B2 true JP5448472B2 (ja) | 2014-03-19 |
Family
ID=42708848
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2009016133A Expired - Fee Related JP5448472B2 (ja) | 2009-01-28 | 2009-01-28 | ハイブリッド型作業機械 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP5448472B2 (ja) |
Families Citing this family (12)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP5386457B2 (ja) * | 2010-09-27 | 2014-01-15 | 三菱電機株式会社 | 電力回生装置 |
| KR101560300B1 (ko) | 2011-06-28 | 2015-10-14 | 스미도모쥬기가이고교 가부시키가이샤 | 쇼벨 및 쇼벨의 제어방법 |
| JP5970774B2 (ja) | 2011-10-27 | 2016-08-17 | スズキ株式会社 | バッテリ保護装置 |
| JP5699927B2 (ja) * | 2011-12-19 | 2015-04-15 | トヨタ自動車株式会社 | 車両用電源装置 |
| CN104718681B (zh) * | 2012-10-10 | 2018-06-19 | 住友建机株式会社 | 挖土机及挖土机的控制方法 |
| JP6009339B2 (ja) * | 2012-12-11 | 2016-10-19 | ナブテスコ株式会社 | ハイブリッド式建設機械の制御装置 |
| JP6191247B2 (ja) * | 2013-06-04 | 2017-09-06 | 日産自動車株式会社 | ハイブリッド車両の制御装置 |
| JP6167688B2 (ja) * | 2013-06-24 | 2017-07-26 | 日産自動車株式会社 | ハイブリッド車両の制御装置 |
| JP2015003681A (ja) * | 2013-06-24 | 2015-01-08 | 日産自動車株式会社 | プラグインハイブリッド車両の制御装置 |
| JP6126994B2 (ja) * | 2013-07-23 | 2017-05-10 | 株式会社小松製作所 | ハイブリッド作業機械およびハイブリッド作業機械のエンジン自動停止制御方法 |
| KR101739710B1 (ko) | 2013-09-26 | 2017-05-25 | 두산인프라코어 주식회사 | 선회 브레이크를 이용한 선회 전동기 제어 장치 및 그 방법 |
| JP6320720B2 (ja) * | 2013-11-14 | 2018-05-09 | 住友重機械工業株式会社 | ショベル |
Family Cites Families (9)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH1064770A (ja) * | 1996-08-22 | 1998-03-06 | Honda Motor Co Ltd | 電気二重層コンデンサの充電方法及び装置 |
| JP2005237178A (ja) * | 2004-02-23 | 2005-09-02 | Kobelco Contstruction Machinery Ltd | 作業機械の動力源装置 |
| JP4075847B2 (ja) * | 2004-04-26 | 2008-04-16 | 株式会社デンソー | 車載蓄電池の状態監視装置 |
| DE112005001657B8 (de) * | 2004-07-12 | 2022-03-24 | Toyota Jidosha Kabushiki Kaisha | Leistungsausgabevorrichtung, mit Leistungsausgabevorrichtung ausgestattetes Fahrzeug und Steuerverfahren der Leistungsausgabevorrichtung |
| JP2007116825A (ja) * | 2005-10-20 | 2007-05-10 | Nissan Diesel Motor Co Ltd | 電気二重層キャパシタ電力貯蔵装置 |
| JP4807058B2 (ja) * | 2005-11-10 | 2011-11-02 | パナソニック株式会社 | 車両用電源装置 |
| JP2007195359A (ja) * | 2006-01-20 | 2007-08-02 | Toyota Motor Corp | 二次電池の充放電制御装置 |
| JP2008127762A (ja) * | 2006-11-16 | 2008-06-05 | Hitachi Constr Mach Co Ltd | 建設機械 |
| JP5017084B2 (ja) * | 2007-03-09 | 2012-09-05 | 株式会社日立製作所 | 電池制御方法及びそのシステム |
-
2009
- 2009-01-28 JP JP2009016133A patent/JP5448472B2/ja not_active Expired - Fee Related
Also Published As
| Publication number | Publication date |
|---|---|
| JP2010178446A (ja) | 2010-08-12 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5448472B2 (ja) | ハイブリッド型作業機械 | |
| CN102301561B (zh) | 混合式工作机械及蓄电控制装置 | |
| KR101037949B1 (ko) | 하이브리드형 작업기계 | |
| JP5591354B2 (ja) | ハイブリッド作業機械及びハイブリッド作業機械の制御方法 | |
| US8285434B2 (en) | Hybrid-type construction machine having an output condition calculating unit to calculate output conditions of an engine and an electric storage device | |
| JP5198660B2 (ja) | ハイブリッド式ショベル及びその制御方法 | |
| JP5579166B2 (ja) | ハイブリッド型作業機械 | |
| US20150315766A1 (en) | Hybrid work machine | |
| JP5283515B2 (ja) | キャパシタ劣化判断方法及び作業機械 | |
| JP6245828B2 (ja) | 作業機械及び作業機械の制御方法 | |
| JP5279660B2 (ja) | ハイブリッド型作業機械、及び、その制御方法 | |
| JP5178666B2 (ja) | ハイブリッド型掘削機械 | |
| JP5449806B2 (ja) | ハイブリッド型作業機械及びその制御方法 | |
| JP5100696B2 (ja) | ハイブリッド型作業機械 | |
| JP5601761B2 (ja) | ハイブリッド型作業機械 | |
| JP5355260B2 (ja) | ハイブリッド型作業機械及びその効率係数の算出方法 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20120904 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20130605 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20130726 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20131224 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20131224 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 5448472 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| S802 | Written request for registration of partial abandonment of right |
Free format text: JAPANESE INTERMEDIATE CODE: R311802 |
|
| R350 | Written notification of registration of transfer |
Free format text: JAPANESE INTERMEDIATE CODE: R350 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| LAPS | Cancellation because of no payment of annual fees |