JP5379589B2 - Vacuum suction pad, transfer arm and substrate transfer device - Google Patents
Vacuum suction pad, transfer arm and substrate transfer device Download PDFInfo
- Publication number
- JP5379589B2 JP5379589B2 JP2009173195A JP2009173195A JP5379589B2 JP 5379589 B2 JP5379589 B2 JP 5379589B2 JP 2009173195 A JP2009173195 A JP 2009173195A JP 2009173195 A JP2009173195 A JP 2009173195A JP 5379589 B2 JP5379589 B2 JP 5379589B2
- Authority
- JP
- Japan
- Prior art keywords
- vacuum suction
- opening
- hole
- suction pad
- surface portion
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
Images















Landscapes
- Manipulator (AREA)
- Container, Conveyance, Adherence, Positioning, Of Wafer (AREA)
Abstract
Description
本発明は、搬送アームに取付けられ基板を真空吸着する真空吸着パッド、その真空吸着パッドが取付けられた搬送アーム及び基板搬送装置に関する。 The present invention relates to a vacuum suction pad that is attached to a transfer arm and vacuum-sucks a substrate, a transfer arm to which the vacuum suction pad is attached, and a substrate transfer device.
半導体デバイスの製造工程においては、被処理基板である半導体ウェハ(以下、単に基板又はウェハと記す。)に対し、真空雰囲気で成膜処理やエッチング処理等の基板処理が行われる。最近では、このような基板処理の効率化の観点から、複数の基板処理を行う基板処理室を真空に保持された搬送室に連結し、搬送室に設けられた搬送装置により各基板処理室にウェハを搬送することを可能としたマルチチャンバタイプの基板処理装置が注目されている。 In a semiconductor device manufacturing process, a substrate processing such as a film forming process or an etching process is performed in a vacuum atmosphere on a semiconductor wafer (hereinafter simply referred to as a substrate or a wafer) that is a substrate to be processed. Recently, from the viewpoint of improving the efficiency of such substrate processing, a substrate processing chamber for performing a plurality of substrate processings is connected to a transfer chamber held in a vacuum, and each substrate processing chamber is connected by a transfer device provided in the transfer chamber. A multi-chamber type substrate processing apparatus capable of transporting a wafer has attracted attention.
一方、マルチチャンバタイプの基板処理装置においては、大気中に置かれたウェハカセットから真空に保持された搬送室へウェハを搬送するために、搬送室とウェハカセットとの間にロードロック室を設け、ロードロック室を介してウェハが搬送される。 On the other hand, in a multi-chamber type substrate processing apparatus, a load lock chamber is provided between a transfer chamber and a wafer cassette in order to transfer a wafer from a wafer cassette placed in the atmosphere to a transfer chamber held in a vacuum. The wafer is transferred through the load lock chamber.
このうちウェハカセットとロードロック室との間でのウェハの受け渡しは、ウェハカセットとロードロック室の間にあるウェハ搬入出室に設けられた基板搬送装置により行われる。基板搬送装置は、必要最小限の空間で旋回可能とするとともに遠方までウェハを搬送可能とするために多関節構造を有し、伸縮可能になされた搬送アームを有している。また、多関節構造を有する搬送アームの先端には、ウェハを保持するためのピックを有する。基板搬送装置は、ウェハを大気中で搬送するため、ウェハをピックに真空吸着して搬送する。従って、ピックには、ウェハを真空吸着するための真空吸着パッドが設けられている。 Among these, the transfer of the wafer between the wafer cassette and the load lock chamber is performed by a substrate transfer device provided in a wafer carry-in / out chamber between the wafer cassette and the load lock chamber. The substrate transfer apparatus has a multi-joint structure in order to be able to turn in a minimum necessary space and to transfer a wafer to a distant place, and has a transfer arm that can be extended and contracted. A transfer arm having a multi-joint structure has a pick for holding the wafer at the tip of the transfer arm. In order to transfer the wafer in the atmosphere, the substrate transfer device transfers the wafer by vacuum suction on a pick. Therefore, the pick is provided with a vacuum suction pad for vacuum-sucking the wafer.
このような基板搬送装置の搬送アームにおいて真空吸着パッドが用いられている例として、ウェハを真空吸着して保持する真空吸着パッドと、真空吸着パッドに真空吸着保持されたウェハを搬送するためのハンドと、パッドとハンドとの間で真空供給用流路を形成する弾性部材を有し、弾性部材がパッドとハンドとの間に介在されたOリング状弾性部材であり、真空吸着パッドがハンドからの脱落を脱落防止ネジにより防止されている例が開示されている(例えば特許文献1参照)。 As an example in which a vacuum suction pad is used in the transfer arm of such a substrate transfer apparatus, a vacuum suction pad for vacuum-sucking and holding a wafer and a hand for transporting a wafer vacuum-sucked and held by the vacuum suction pad And an elastic member that forms a flow path for vacuum supply between the pad and the hand, the elastic member is an O-ring elastic member interposed between the pad and the hand, and the vacuum suction pad is removed from the hand An example is disclosed in which a drop-off is prevented by a drop-off prevention screw (see, for example, Patent Document 1).
また、ガラス基板を保持する真空吸着部を、ガラス基板と接するシート部材と、シート部材の下面に設けられてシート部材とアームとに接合される弾性部材と、弾性部材とシート部材とを貫通し、ガラス基板に真空圧を作用させる真空吸着穴とから構成し、ガラス基板を搬送する際は、弾性部材を弾性変形させてシート部材をガラス基板に接触させ、ガラス基板とシート部材で囲まれた空間を真空吸着穴から真空排気し、ガラス基板に真空圧を作用させて真空吸着部に保持させて搬送する例が開示されている(例えば特許文献2参照)。 In addition, a vacuum suction part for holding the glass substrate is formed through the sheet member in contact with the glass substrate, an elastic member provided on the lower surface of the sheet member and joined to the sheet member and the arm, and the elastic member and the sheet member. When the glass substrate is transported, the elastic member is elastically deformed to bring the sheet member into contact with the glass substrate and surrounded by the glass substrate and the sheet member. An example is disclosed in which a space is evacuated from a vacuum suction hole, a vacuum pressure is applied to a glass substrate, and the glass substrate is held and transported (for example, see Patent Document 2).
ところが、上記の真空吸着パッドを取付けた搬送アームによりウェハを真空吸着して搬送するときに、次のような場合がある。 However, when the wafer is vacuum-sucked and transported by the transport arm to which the vacuum suction pad is attached, there are the following cases.
ピック剛性が高い場合、ウェハと真空吸着パッドとの間に隙間が生じて、安定して真空吸着ができない場合がある。この場合、安定して真空吸着させるためには、真空吸着パッドの形状を変形しやすい薄い形状にする、又は真空吸着パッドをゴムなどの柔らかい素材により作製することが必要である。 If the pick rigidity is high, a gap may be generated between the wafer and the vacuum suction pad, and vacuum suction may not be performed stably. In this case, in order to stably perform vacuum suction, it is necessary to make the shape of the vacuum suction pad thin and easy to deform, or to make the vacuum suction pad from a soft material such as rubber.
しかし、薄い形状の真空吸着パッドを用いるときに、ピックに保持するために、接着しなければならず、真空吸着パッド部分のみを交換することができない場合がある。 However, when using a vacuum suction pad having a thin shape, in order to hold the vacuum suction pad, it must be adhered, and only the vacuum suction pad portion may not be exchanged.
また、ゴムなどの柔らかい素材により作製された真空吸着パッドを用いるときに、長時間ウェハを吸着する間に真空吸着パッドがウェハに貼り付くことによってウェハがピックに固着してしまい、ウェハがピックから剥がれなくなる場合がある。 In addition, when using a vacuum suction pad made of a soft material such as rubber, the wafer sticks to the pick while the wafer is being attached to the wafer for a long time while the wafer is being sucked. May not peel off.
本発明は上記の点に鑑みてなされたものであり、搬送アームに基板を真空吸着して搬送する場合において、容易に交換することができるとともに、長時間吸着してもウェハに固着することがなく、安定してウェハを真空吸着することができる真空吸着パッドを提供する。 The present invention has been made in view of the above points, and in the case of transporting a substrate by vacuum suction to a transport arm, it can be easily replaced and can be fixed to a wafer even if it is attracted for a long time. There is provided a vacuum suction pad that can stably vacuum-suck a wafer.
上記の課題を解決するために本発明では、次に述べる手段を講じたことを特徴とするものである。 In order to solve the above problems, the present invention is characterized by the following measures.
本発明は、基板搬送装置の搬送アームに形成された第1の取付孔に取り付けられ、前記搬送アームの真空吸引路に連結されて、基板を該搬送アームに真空吸着する真空吸着パッドであって、第1の開口部を備える内側パッドと、前記内側パッドが取り付けられる第2の取付孔が形成された外側パッドとを有し、前記内側パッドは、前記第1の開口部が形成された上面部と、第1のシール部材を配置する第1の装着部が形成された第1の側周面部と、前記第2の取付孔の底面に当接する第1の脚部が形成された第1の下面部とを備え、前記外側パッドは、第2のシール部材を配置する第2の装着部が形成された第2の側周面部と、前記第1の取付孔の底面に当接する第2の脚部が形成された第2の下面部とを備え、前記第1の側周面部は、前記第1の装着部に配置した前記第1のシール部材を介して、前記第2の取付孔に取り付けられ、前記第2の側周面部は、前記第2の装着部に配置した前記第2のシール部材を介して、前記第1の取付孔に取り付けられる、ことを特徴とする。 The present invention is a vacuum suction pad that is attached to a first mounting hole formed in a transfer arm of a substrate transfer apparatus, is connected to a vacuum suction path of the transfer arm, and vacuum-sucks a substrate to the transfer arm. And an inner pad having a first opening and an outer pad in which a second mounting hole to which the inner pad is attached is formed, and the inner pad has an upper surface on which the first opening is formed. A first side surface portion on which a first mounting portion on which a first seal member is disposed is formed, and a first leg portion that is in contact with the bottom surface of the second mounting hole. A second side peripheral surface portion on which a second mounting portion on which the second seal member is disposed is formed, and a second surface that abuts against the bottom surface of the first mounting hole. A second lower surface portion formed with a leg portion of the first side peripheral surface portion, The second seal is disposed in the second mounting hole via the first seal member disposed in the first mounting portion, and the second side peripheral surface portion is disposed in the second mounting portion. It is attached to the first attachment hole via a member .
本発明によれば、搬送アームに取付けられた真空吸着パッドにより基板を真空吸着して搬送する場合において、真空吸着パッドを容易に交換することができるとともに、長時間吸着してもウェハに固着することがなく、安定してウェハを真空吸着することができる。 According to the present invention, when the substrate is vacuum-sucked and transported by the vacuum suction pad attached to the transport arm, the vacuum suction pad can be easily replaced, and can be fixed to the wafer even if it is suctioned for a long time. In this way, the wafer can be stably vacuum-sucked.
次に、本発明を実施するための形態について図面と共に説明する。
(第1の実施の形態)
最初に、図1を参照し、本発明の第1の実施の形態に係る基板搬送装置を備える基板処理装置について説明する。図1は、本実施の形態に係る基板処理装置の構成を示す平面図である。
Next, a mode for carrying out the present invention will be described with reference to the drawings.
(First embodiment)
First, a substrate processing apparatus including a substrate transfer apparatus according to a first embodiment of the present invention will be described with reference to FIG. FIG. 1 is a plan view showing the configuration of the substrate processing apparatus according to the present embodiment.
基板処理装置1は、所定の真空下で被処理基板としての半導体ウェハ(以下、単に「ウェハ」という。)Wに対して、エッチング等の処理を行うものである。
The
基板処理装置1は、2つの処理ユニット2、3を備えており、各処理ユニット2、3では、それぞれ独立してウェハWのエッチング処理を実施できるように構成されている。各処理ユニット2、3には、それぞれロードロック室6、7がゲートバルブG1を介して接続されている。ロードロック室6、7の処理ユニット2、3と反対側には、搬送室であるウェハ搬入出室8が設けられており、ウェハ搬入出室8のロードロック室6、7と反対側にはウェハWを収容可能なフープ(FOUP)Fを取り付ける3つの接続ポート9、10、11が設けられている。
The
2つの処理ユニット2、3は、各ゲートバルブG1を開放することにより、ロードロック室6、7と連通され、各ゲートバルブG1を閉じることによりロードロック室6、7から遮断される。また、ロードロック室6、7のウェハ搬入出室8に接続される部分にも、ゲートバルブG2が設けられており、ロードロック室6、7は、ゲートバルブG2を開放することによりウェハ搬入出室8に連通され、これらを閉じることにより、ウェハ搬入出室8から遮断される。 The two processing units 2 and 3 communicate with the load lock chambers 6 and 7 by opening each gate valve G1, and are disconnected from the load lock chambers 6 and 7 by closing each gate valve G1. Also, a gate valve G2 is provided at a portion of the load lock chambers 6 and 7 connected to the wafer loading / unloading chamber 8, and the load lock chambers 6 and 7 are loaded and unloaded by opening the gate valve G2. By communicating with the chamber 8 and closing them, the wafer loading / unloading chamber 8 is shut off.
ロードロック室6、7内には、処理ユニット2、3と、ウェハ搬入出室8との間で、被処理体であるウェハWの搬入出を行う基板搬送装置4、5がそれぞれ設けられている。
In the load lock chambers 6, 7,
ウェハ搬入出室8のフープF取付け用の3つの接続ポート9、10、11には、それぞれシャッターが設けられており、接続ポート9、10、11にウェハWを収容したフープFまたは空のフープFが直接取付けられ、取付けられた際にシャッターが外れて外気の侵入を防止しつつウェハ搬入出室8と連通するようになっている。また、ウェハ搬入出室8の片方の側面には、アライメントチャンバー14が設けられており、そこでウェハWのアライメントが行われる。
The three
ウェハ搬入出室8内には、フープFに対するウェハWの搬入出およびロードロック室6、7に対するウェハWの搬入出を行う基板搬送装置16が設けられている。基板搬送装置16は、フープFの配列方向に沿ってレール18上を走行可能となっている。また、基板搬送装置16は、多関節構造の搬送アーム17を有しており、搬送アーム17上にウェハWを載せて搬送を行う。
In the wafer loading / unloading chamber 8, a
このような基板処理装置1においては、まず、大気圧1.3Pa以上の清浄空気雰囲気に保持されたウェハ搬入出室8内の基板搬送装置16により、いずれかのフープFからウェハWを1枚取り出してアライメントチャンバー14に搬入し、ウェハWの位置合わせを行う。次いで、ウェハWをロードロック室6、7のいずれかに搬入し、ロードロック室6、7内を真空引きした後、基板搬送装置4、5のいずれかによりロードロック室6、7のいずれかの内のウェハWを処理ユニット2、3のいずれかに搬入して、基板処理を行う。その後、ウェハWを基板搬送装置4、5のいずれかによりロードロック室6、7のいずれかに搬入し、その中を大気圧に戻した後、ウェハ搬入出室8内の基板搬送装置16によりロードロック室6、7内のウェハWを取り出し、フープFのいずれかに収容する。このような操作をウェハWに対して行い、1ロットの処理が終了する。
In such a
次に、図2を参照し、搬送アームの構成について説明する。図2は、本実施の形態に係る搬送アームの構成を示す概略斜視図である。 Next, the configuration of the transfer arm will be described with reference to FIG. FIG. 2 is a schematic perspective view showing the configuration of the transfer arm according to the present embodiment.
基板搬送装置16は、多関節構造の搬送アーム17を複数例えば2つ有している。搬送アーム17は、それぞれ先端にウェハWを保持するためのピック19を有しており、ピック19上にウェハWを載せて搬送を行う。ピック19は、例えばアルミナ(Al2O3)などのセラミックス材料で構成されており、ウェハWを保持する保持面には、ウェハWを真空吸着して保持する真空吸着パッド20が複数例えば3つ取付けられている。真空吸着パッド20は、その吸着力によりピック19上でウェハWが位置ずれを起こしたり、ピック19から落下したりしないようにウェハWを保持する。なお、本発明における搬送アームは、搬送アーム17及び搬送アーム17の先端に設けられたピック19を含む。従って、以下では、「ピック19」を「ピック19(搬送アーム17)」と記す。
The
次に、図3及び図4を参照し、搬送アームの取付孔に取り付けられる真空吸着パッドについて説明する。 Next, with reference to FIG.3 and FIG.4, the vacuum suction pad attached to the attachment hole of a conveyance arm is demonstrated.
図3は、本実施の形態に係る搬送アームの取付孔に真空吸着パッドが取り付けられている状態を模式的に示す断面図である。図3(a)は、取付孔の一つの例を示し、図3(b)は、取付孔の他の例を示す。図4は、本実施の形態に係る真空吸着パッドを示す斜視図である。図4(a)は、斜め上方より視た図であり、図4(b)は、斜め下方より視た図である。 FIG. 3 is a cross-sectional view schematically showing a state in which the vacuum suction pad is attached to the attachment hole of the transfer arm according to the present embodiment. FIG. 3A shows one example of the mounting hole, and FIG. 3B shows another example of the mounting hole. FIG. 4 is a perspective view showing a vacuum suction pad according to the present embodiment. FIG. 4A is a diagram viewed from diagonally above, and FIG. 4B is a diagram viewed from diagonally below.
図3(a)に示す例では、本実施の形態に係るピック19(搬送アーム17)は、真空吸引路21、取付孔22を有する。
In the example shown in FIG. 3A, the pick 19 (conveying arm 17) according to the present embodiment has a
真空吸引路21は、吸引路溝部23、取付孔連通孔24、吸引路蓋部25を有する。吸引路溝部23は、ピック19(搬送アーム17)のウェハWを真空吸着する側と反対側、すなわちピック19(搬送アーム17)のウェハWを保持する保持面(上面)26と反対面(下面)27の一部にピック19(搬送アーム17)の根元側から取付孔22の下方にかけて形成された溝である。取付孔連通孔24は、吸引路溝部23と取付孔22とを連通する連通孔であり、例えば2つ形成することができる。吸引路蓋部25は、吸引路溝部23をピック19(搬送アーム17)の保持面の反対面(下面)27から覆って密閉する。吸引路溝部23及び取付孔連通孔24は、例えばセラミックス材料よりなるピック19(搬送アーム17)を切削加工することにより形成される。吸引路蓋部25は、例えば金属板をピック19(搬送アーム17)の保持面の反対面(下面)27に貼付加工することにより形成される。
The
真空吸引路21は、ピック19(搬送アーム17)の保持面の反対面(下面)27に形成しなくてもよく、例えば第2の実施の形態で後述する加工孔のように、ピック19(搬送アーム17)の保持面(上面)26と反対面(下面)27との略中間をくり抜き加工して形成してもよい。
The
また、真空吸引路21は、基板搬送装置16又は基板処理装置1の内部あるいは基板処理装置1の外部に設けられた図示しない真空排気機構に接続され、取付孔22、真空吸着パッド20を介し、ウェハWを真空吸着する。
Further, the
取付孔22は、ピック19(搬送アーム17)のウェハWを保持する保持面(上面)26に形成され、ピック19(搬送アーム17)の保持面(上面)26から反対面(下面)27まで貫通せず、保持面(上面)26から反対面(下面)27までの途中まで形成された孔である。取付孔22は、内壁29及び底面30を有する。取付孔22の底面30には、取付孔22と真空吸引路21とを連通する取付孔連通孔24が開口し、開口部31が形成されている。図3(a)に示す例では、取付孔連通孔24が2つ形成され、開口部31も2つ形成されている。開口部31は、3つ以上形成されてもよく、1つのみ形成されてもよい。開口部31は、本発明における第3の開口部に相当する。
The mounting
なお、取付孔22の平面視での形状(保持面上方から視た形状)が、略円形であってもよく、円形以外の方形等の種々の形状であってもよい。また、取付孔22の内壁29には、シール部材32を介して真空吸着パッド20を取り付ける際に、真空吸着パッド20の位置ずれを防止するための装着溝が形成されていてもよい。
In addition, the shape of the mounting
また、ピック19(搬送アーム17)の保持面(上面)26と反対面(下面)27との間の距離すなわち厚さを、例えば3mmとし、取付孔22を円形形状とするとき、内径を17mm、深さを2mmとすることができる。
Further, when the distance between the holding surface (upper surface) 26 and the opposite surface (lower surface) 27 of the pick 19 (conveying arm 17), that is, the thickness is 3 mm, for example, and the mounting
本実施の形態に係る真空吸着パッド20は、上面部41、側周面部42、下面部43を有する。
The
上面部41には、開口部44が形成されている。開口部44は、2つ形成され、上面部41の中心に対して互いに対称な位置に形成されている。開口部44は、3つ以上形成されてもよく、1つのみ形成されてもよい。開口部44は、本発明における第1の開口部に相当する。また、上面部41には、開口部44を取り囲むように上面部41から突出し、ウェハWの表面と接触する接触部45が形成されている。接触部45は、ゴムなどの柔らかい素材ではなく、剛性の高い素材(具体的には後述する)から成るため、長時間ウェハWと接触していても固着するようなことがなく、ピック19(搬送アーム17)からウェハWが剥がれなくなることを防止する。
An
側周面部42には、シール部材32を装着する装着溝46(装着部)が形成されている。装着溝46は、装着されるシール部材32が真空吸着パッド20の上面部41側又は下面部43側にずれることを防止するとともに、真空吸着パッド20を取付孔22に気密に取付ける。なお、本実施の形態においては装着部は装着溝46としたが、シール部材32が真空吸着パッド20に対して相対的に位置ずれすることなく取り付けられるようになされていれば良く、例えば、表面加工によって必要な摩擦力が得られるようにしたり、装着部の周囲に位置ずれ防止用の凸部を設けるようにしても良い(以下、同様)。
A mounting groove 46 (a mounting portion) for mounting the
下面部43には、取付孔22の底面30に当接する脚部47が形成されている。脚部47は、下面部43の中心に形成されており、本実施の形態においては下方に頂点を配置した円錐状の形状から成る。勿論、脚部47は、このような形状に限定されるものではなく、例えば棒状であっても良いし、側周面部42から下方に向かうに従って漸次径を狭める円錐状の形状、或いは半球状の突起、その他、下面部43よりも少ない面積で底面30に当接するような形状とすることができる。脚部47は、下面部43の中心でない位置に形成されていてもよい。
A
また、下面部43には、開口部44と連通する開口部48が形成されている。開口部48は、2つ形成され、上面部41の中心に対して互いに対称な位置に形成されている。開口部48は、開口部44に対応し、3つ以上形成されていてもよく、1つ形成されていてもよい。開口部48は、本発明における第2の開口部に相当する。
In addition, an
真空吸着パッド20は、装着溝46に装着されたシール部材32を介して、側周面部42が取付孔22の内壁29に取り付けられている。シール部材32を介して側周面部42が取付孔22に対向するように取り付けられることにより、下面部43と取付孔22の底面30とで囲まれた空間を、シール部材32により気密に保持する。その結果、ウェハWは、開口部44、開口部48、開口部31を介してピック19(搬送アーム17)の真空吸引路21により真空吸着される。
In the
真空吸着パッド20は、図4に示す例では、平面視における形状が略円形形状を有しているが、シール部材32を介して取付孔22の内壁29に気密に取付けられればよく、円形以外の方形等の種々の形状であってもよい。また、平面視における形状が略円形形状を有している場合、真空吸着パッド20をピック19(搬送アーム17)に装着する際の真空吸着パッド20の水平面内における向きを任意の向きとすることができる。
In the example shown in FIG. 4, the
また、真空吸着パッド20は、例えばポリテトラフルオロエチレン(PTFE)、パーフルオロアルコシキアルカン(PFA)、エチレンテトラフルオロエチレンコポリマー(ETFE)等のフッ素樹脂等により作製することができる。
Further, the
また、ピック19(搬送アーム17)の厚さを3mmとし、取付孔22の内径を16mm、深さを2mmとするとき、真空吸着パッド20の外径を15mm、上面部41から下面部43までの厚さを1.5mmとすることができる。
Further, when the thickness of the pick 19 (conveying arm 17) is 3 mm, the inner diameter of the mounting
シール部材32として、環状の弾性シール部材を用いることができる。環状の弾性シール部材を用いることにより、真空吸着パッド20をピック19(搬送アーム17)に容易に装着することができる。また、図4に示すように、真空吸着パッド20の平面視における形状が略円形形状である場合には、弾性変形を許容する樹脂製のOリングを用いることもできる。
An annular elastic seal member can be used as the
なお、取付孔の底面が吸引路蓋部により構成されるようにしてもよい。このような取付孔の例を図3(b)に示す。 In addition, you may make it the bottom face of an attachment hole be comprised by the suction path cover part. An example of such a mounting hole is shown in FIG.
図3(b)に示す例では、真空吸引路21aは、取付孔連通孔を有しておらず、取付孔22aと直接連通している。従って、吸引路溝部23aも取付孔22aの下端で取付孔22aに接続している。また、取付孔22aは、ピック19a(搬送アーム17a)の保持面(上面)26から反対面(下面)27まで少なくとも一部貫通するように形成され、貫通した開口部分は、吸引路蓋部25aで覆われ密閉されている。従って、取付孔22aは、内壁29aを有する点は図3(a)に示す例と同様であるものの、底面30aは、吸引路蓋部25aにより構成される。また、真空吸着パッド20の下面部43に形成された脚部47は、吸引路蓋部25aにより構成された底面30aに当接する。
In the example shown in FIG. 3B, the
図3(b)に示す例によれば、ピック19a(搬送アーム17a)の厚さを、図3(a)に示す例よりも薄くすることができる。
According to the example shown in FIG. 3B, the thickness of the
次に、図5を参照し、本実施の形態に係る真空吸着パッド20が、ウェハWを安定して真空吸着することができることを説明する。図5は、本実施の形態に係る搬送アームの真空吸着パッドが湾曲した基板Wを真空吸着している状態を模式的に示す断面図である。
Next, with reference to FIG. 5, it will be described that the
本実施の形態に係る真空吸着パッド20は、脚部47が取付孔22の底面30に当接し、側周面部42がシール部材32を介して取付孔22の内壁29に取付けられる。脚部47が取付孔22の底面30に当接することによって、上下方向に沿う移動のうち、脚部47が取付孔22の底面30に当接した状態から更に下方に向かう方向の移動は拘束される。一方、側周面部42は、取付孔22の内壁29に気密に取り付けられるものの、シール部材32が環状の弾性シール部材であるため、シール部材32の弾性変形に伴って上下方向及び水平方向に微小移動することができる。
In the
そのため、図5に示すように、ウェハWが湾曲している場合、又はウェハWの表面がピック19(搬送アーム17)の保持面(上面)26に平行でない場合にも、取付孔22の底面30に当接した脚部47を支点として上面部41を傾けることができる。また、ウェハWを安定して真空吸着することができ、単純な構造で、真空吸引時に大気圧によって真空吸着パッドが沈み込む現象を防止できる。
Therefore, as shown in FIG. 5, even when the wafer W is curved or when the surface of the wafer W is not parallel to the holding surface (upper surface) 26 of the pick 19 (transfer arm 17), the bottom surface of the mounting
更に、本実施の形態に係る真空吸着パッド20は、側周面部42がシール部材32を介して取付孔22に取付けられているとともに、上面部41の中心に対して互いに対称となる位置に2つの開口部44が設けられている。そのため、例えばピンセット等の工具の2つの先端を2つの開口部44に挿入して挟持することができ、ピック19(搬送アーム17)に容易に脱着させることができ、真空吸着パッド20の交換作業を容易に行うことができる。
Further, in the
また、脚部47が下面部43の中心に形成される場合には、上面部41の変位を最大限許容することができる。
(第1の実施の形態の第1の変形例)
次に、図6及び図7を参照し、本発明の第1の実施の形態の第1の変形例に係る真空吸着パッドについて説明する。
Further, when the
(First modification of the first embodiment)
Next, with reference to FIG.6 and FIG.7, the vacuum suction pad which concerns on the 1st modification of the 1st Embodiment of this invention is demonstrated.
本変形例に係る真空吸着パッド20aは、接触部45の側周面部42a側に、薄肉部49を有する点で、第1の実施の形態に係る真空吸着パッドと相違する。
The
図6は、本変形例に係る搬送アームの取付孔に真空吸着パッドが取り付けられている状態を模式的に示す断面図である。図7は、本変形例に係る搬送アームの真空吸着パッドが湾曲した基板を真空吸着している状態を模式的に示す断面図である。なお、以下の文中では、先に説明した部分には同一の符号を付し、説明を省略する場合がある(以下の変形例、実施の形態についても同様)。 FIG. 6 is a cross-sectional view schematically showing a state in which the vacuum suction pad is attached to the attachment hole of the transfer arm according to this modification. FIG. 7 is a cross-sectional view schematically showing a state where the vacuum suction pad of the transfer arm according to this modification is vacuum sucking the curved substrate. In the following text, the same reference numerals are given to the parts described above, and the description may be omitted (the same applies to the following modified examples and embodiments).
本変形例に係る真空吸着パッド20aが取付けられるピック19(搬送アーム17)、そのピック19(搬送アーム17)を有する基板搬送装置16は、第1の実施の形態と同様にある。
The pick 19 (transfer arm 17) to which the
本変形例に係る真空吸着パッド20aも、第1の実施の形態と同様に、上面部41、側周面部42a、下面部43を有する。しかしながら、上面部41に形成された接触部45と、側周面部42aとの間に、上下方向に沿う厚み寸法の小さな薄肉部49を有し、上面部41を含めた本体部50と、側周面部42aとは、薄肉部49を介して接続されている。
Similarly to the first embodiment, the
上面部41の中心に対して互いに対称な位置に開口部44が2つ形成されており、開口部44が3つ以上形成されてもよく、1つのみ形成されてもよく、開口部44が本発明における第1の開口部に相当し、また、上面部41から突出し、開口部44を取り囲むように接触部45が形成されているのは、第1の実施の形態と同様である。
Two
また、側周面部42aに、シール部材32を装着する装着溝46(装着部)が形成されているのは、第1の実施の形態と同様である。ただし、側周面部42aは、シール部材32を装着できればよく、図6に示すように、シール部材32の上下方向の厚み寸法と略等しくなるように、本体部50よりも上下方向の厚み寸法が小さくてもよい。
Further, the mounting groove 46 (mounting portion) for mounting the
また、下面部43の中心に、取付孔22の底面30に当接する脚部47が形成されており、脚部47が下面部43の中心でない位置に形成されていてもよく、開口部44と連通する開口部48が2つ形成されているのは、第1の実施の形態と同様である。
Further, a
また、真空吸着パッド20aが、装着溝46に装着されたシール部材32を介して、側周面部42aが取付孔22に対向するように取付けられ、下面部43と取付孔22の底面30とで囲まれた空間を気密に保持し、また、ウェハWが、開口部44、開口部48、開口部31を介してピック19(搬送アーム17)の真空吸引路21により真空吸着されるのは、第1の実施の形態と同様である。
Further, the
また、シール部材32として、Oリングを含めた環状の弾性シール部材を用いることができるのは、第1の実施の形態と同様である。
Further, as in the first embodiment, an annular elastic seal member including an O-ring can be used as the
一方、本変形例では、接触部45が形成された上面部41を含む本体部50と、シール部材32を装着する装着溝46が形成された側周面部42aとが薄肉部49で接続されている。薄肉部49は、本体部50及び側周面部42aと比べて上下の厚み寸法が小さいため、変形しやすい。そのため、シール部材32の弾性変形に伴って上下方向及び水平方向に微小移動することができるのに加え、薄肉部49の弾性変形に伴って更に上下方向及び水平方向に移動することができる。
On the other hand, in this modified example, the
そのため、図7に示すように、ウェハWが大きく湾曲している場合、又はウェハWの表面がピック19(搬送アーム17)の保持面に平行でない場合にも、取付孔22の底面30に当接した脚部47を支点として上面部41を傾けることができる。従って、ウェハWを安定して真空吸着することができる。
Therefore, as shown in FIG. 7, even when the wafer W is greatly curved or when the surface of the wafer W is not parallel to the holding surface of the pick 19 (transfer arm 17), the
なお、薄肉部49は、本体部50及び側周面部42aと同一の素材により作製されてもよく、本体部50及び側周面部42aと異なる素材で作製されてもよい。薄肉部49が本体部50及び側周面部42aと異なる素材で作製される場合、薄肉部49における変形が更に容易になる。
(第1の実施の形態の第2の変形例)
次に、図8及び図9を参照し、本発明の第1の実施の形態の第2の変形例に係る真空吸着パッドについて説明する。
Note that the
(Second modification of the first embodiment)
Next, a vacuum suction pad according to a second modification of the first embodiment of the present invention will be described with reference to FIGS.
本変形例に係る真空吸着パッド20bは、下面部43bに脚部が形成されていない点、及び上面部41bに開口部44が1つのみ形成された点で、第1の実施の形態に係る真空吸着パッドと相違する。
The
図8は、本変形例に係る搬送アームの取付孔に真空吸着パッドが取り付けられている状態を模式的に示す断面図である。図9は、本変形例に係る搬送アームの真空吸着パッドが湾曲した基板を真空吸着している状態を模式的に示す断面図である。 FIG. 8 is a cross-sectional view schematically showing a state in which the vacuum suction pad is attached to the attachment hole of the transfer arm according to this modification. FIG. 9 is a cross-sectional view schematically showing a state where the vacuum suction pad of the transfer arm according to this modification is vacuum suctioning the curved substrate.
本変形例に係る真空吸着パッド20bが取付けられるピック19b(搬送アーム17b)を有する基板搬送装置16、基板処理装置1は、第1の実施の形態と同様である。
The
本変形例に係るピック19b(搬送アーム17b)は、図8に示すように、取付孔22bの底面30bにおいて、取付孔22bと真空吸引路21bとを連通する取付孔連通孔24が1つ形成され、取付孔連通孔24が開口する開口部31も1つ形成されている。その他の真空吸引路21b、取付孔22bの構成は、第1の実施の形態と同様である。
As shown in FIG. 8, the
本変形例に係る真空吸着パッドも、第1の実施の形態と同様に、上面部41b、側周面部42、下面部43bを有する。
Similarly to the first embodiment, the vacuum suction pad according to this modification also has an
上面部41bには、開口部44が形成されている。開口部44は、上面部41bの中心に1つのみ形成されている。開口部44は、本発明における第1の開口部に相当する。また、上面部41bから突出し、開口部44を取り囲むように接触部45が形成されているのは、第1の実施の形態と同様である。
An
また、側周面部42に、シール部材32を装着する装着溝46(装着部)が形成されているのは、第1の実施の形態と同様である。
In addition, the mounting groove 46 (mounting portion) for mounting the
一方、下面部43bには、取付孔22bの底面30bに当接する脚部が形成されていない。従って、本変形例に係る真空吸着パッド20bは、シール部材32を介してピック19b(搬送アーム17b)の取付孔22bに取付けられるのみである。また、開口部44と連通する開口部48は1つ形成されている。
On the other hand, the leg part which contact | abuts to the
また、真空吸着パッド20bが、下面部43bと取付孔22bの底面30bとで囲まれた空間を気密に保持し、また、ウェハWが、開口部44、開口部48、開口部31を介してピック19b(搬送アーム17b)の真空吸引路21bにより真空吸着されるのは、第1の実施の形態と同様である。
Further, the
また、シール部材32として、Oリングを含めた環状の弾性シール部材を用いることができるのは、第1の実施の形態と同様である。
Further, as in the first embodiment, an annular elastic seal member including an O-ring can be used as the
本変形例に係る真空吸着パッド20bは、下面部43bに取付孔22bに当接する脚部が形成されておらず、単純な構成を有するが、シール部材32の弾性変形に伴って上下方向及び水平方向に微小移動することができる。
The
そのため、図9に示すように、ウェハWが湾曲している場合、又はウェハWの表面がピック19b(搬送アーム17b)の保持面(上面)26に平行でない場合にも、シール部材32の弾性変形を伴って上面部41bを傾けることができる。従って、ウェハWを安定して真空吸着することができ、単純な構成で、ウェハWの表面に沿うような変位を許容することができる。
(第2の実施の形態)
次に、図10から図12を参照し、本発明の第2の実施の形態に係る搬送アーム及び真空吸着パッドについて説明する。
Therefore, as shown in FIG. 9, even when the wafer W is curved or when the surface of the wafer W is not parallel to the holding surface (upper surface) 26 of the
(Second Embodiment)
Next, a transfer arm and a vacuum suction pad according to a second embodiment of the present invention will be described with reference to FIGS.
本実施の形態は、ピック19c(搬送アーム17c)に貫通孔22cが形成されている点、真空吸着パッド20cの側周面部42cがシール部材32cを介して貫通孔22cに取り付けられる点で、第1の実施の形態と相違する。
In the present embodiment, the through
図10は、本実施の形態に係る搬送アームの貫通孔に真空吸着パッドが取り付けられている状態を模式的に示す断面図である。図11は、本実施の形態に係る真空吸着パッドを示す斜視図である。図12は、本実施の形態に係る搬送アームの真空吸着パッドが湾曲した基板を真空吸着している状態を模式的に示す断面図である。 FIG. 10 is a cross-sectional view schematically showing a state in which the vacuum suction pad is attached to the through hole of the transfer arm according to the present embodiment. FIG. 11 is a perspective view showing a vacuum suction pad according to the present embodiment. FIG. 12 is a cross-sectional view schematically showing a state where the vacuum suction pad of the transfer arm according to the present embodiment is vacuum-sucking the curved substrate.
本実施の形態に係る真空吸着パッド20cが取付けられるピック19c(搬送アーム17c)を有する基板搬送装置16及び基板処理装置1は、第1の実施の形態と同様である。
The
本実施の形態に係るピック19c(搬送アーム17c)は、真空吸引路21c、貫通孔22cを有する。
The
真空吸引路21cは、吸引路溝部23、貫通孔連通孔24c、吸引路蓋部25を有する。吸引路溝部23が、ピック19c(搬送アーム17c)の保持面(上面)26と反対面(下面)27に形成された溝であり、吸引路蓋部25が、吸引路溝部23をピック19c(搬送アーム17c)の保持面(上面)の反対面(下面)27から覆って密閉するのは、第1の実施の形態と同様である。また真空吸引路21cは、図示しない真空排気機構に接続され、貫通孔22c、真空吸着パッド20cを介して、ウェハWを真空吸着する。
The
貫通孔22cは、ピック19c(搬送アーム17c)のウェハWを保持する保持面(上面)26から反対面(下面)27まで貫通するように形成された孔である。貫通孔22cの内壁29cには、貫通孔22cと真空吸引路21cとを連通するL字形状を有する貫通孔連通孔24cが開口し、開口部31cが形成されている。図10に示す例では、貫通孔連通孔24cは1つ形成され、開口部31cも1つ形成されている。貫通孔連通孔24c及び開口部31cは、2つ以上形成されてもよい。開口部31cは、本発明における第3の開口部に相当する。
The through
また、貫通孔22cを中心としてL字形状を有する貫通孔連通孔24cの水平方向に延在する部分である水平孔33(ピック19c(搬送アーム17c)の保持面(上面)26と平行な方向に沿って延在する部分)と反対側には、水平孔33と略同軸に水平方向に延在する加工孔34が形成されている。加工孔34は、貫通孔22cの近傍であってピック19c(搬送アーム17c)の端面35からドリル等による穴あけ加工を行って貫通孔22cに連通する水平孔33を形成するためのものである。また、加工孔34は、ピック19c(搬送アーム17c)の端面35で封止部36により封止されている。
Further, a horizontal hole 33 (a direction parallel to the holding surface (upper surface) 26 of the
また、L字形状を有する貫通孔連通孔24cの垂直方向に延在する部分である垂直孔37(ピック19c(搬送アーム17c)の厚さ方向に沿って延在する部分)は、ピック19c(搬送アーム17c)の保持面(上面)26と反対面(下面)27からドリル等による穴あけ加工を行って、水平孔33と連通するように形成する。
Further, the vertical hole 37 (the portion extending along the thickness direction of the
なお、貫通孔22cの平面視での形状(保持面上方から視た形状)が、略円形であってもよく、円形以外の方形等の種々の形状であってもよい。また、貫通孔22cの内壁29cには、シール部材32cを介して真空吸着パッド20cを取り付ける際に、真空吸着パッド20cの位置ずれを防止するための装着溝が形成されていてもよい。
Note that the shape of the through
また、ピック19c(搬送アーム17c)の保持面(上面)26と反対面(下面)27との間の距離すなわち厚さを例えば3mmとし、貫通孔22cの断面形状を円形形状とするとき、貫通孔22cの内径を17mmとすることができる。
Further, when the distance between the holding surface (upper surface) 26 and the opposite surface (lower surface) 27 of the
なお、図10においては、真空吸着パッド20cが貫通孔22cに取り付けられた際に、真空吸着パッド20cの後述する突起部51cが反対面(下面)27から下方に突出しないように、貫通孔22cの反対面(下面)27側の開口部38cに、切欠部39cが設けられている例を示す。また、開口部38cは、本発明における第4の開口部に相当する。
In FIG. 10, when the
本実施の形態に係る真空吸着パッド20cは、上面部41c、側周面部42c、下面部43cを有し、全体として円筒状の形状を有する。
The
上面部41cには、開口部44cが形成されている。開口部44cは、上面部41cの中心に1つ形成されている。開口部44cは、2つ以上形成されてもよい。開口部44cは、本発明における第1の開口部に相当する。また、上面部41cから突出し、開口部44cを取り囲むように接触部45cが形成されている。
An
側周面部42cには、シール部材32cを装着する装着溝46c(装着部)が複数形成されている。図10に示す例では、装着溝46cが2つ形成されている。
A plurality of mounting
また、側周面部42cには、開口部44cと連通する開口部48cが1つ形成されている。開口部48cは、開口部44cに対応し、2つ以上形成されてもよい。開口部48cは、本発明における第2の開口部に相当する。
In addition, one
下面部43cには、突起部51cが形成されている。突起部51cは、図10に示すように、ピック19c(搬送アーム17c)のウェハWを真空吸着する側と反対側、すなわちピック19c(搬送アーム17c)の保持面(上面)26の反対面(下面)27に形成され、貫通孔22cを形成する開口部38cに係止される。突起部51cは、貫通孔22cの断面形状よりも大きな断面形状を有している。なお、本実施の形態において突起部51cは下面部43cの全周にわたって形成しているが、一部分だけに形成しても良い。例えば真空吸着パッド20cの突起部51c以外の部位の外径が15mm、貫通孔22cの内径が17mmである場合、突起部51cは、例えば外径を20mmとすることができる。
A
真空吸着パッド20cは、装着溝46cに装着されたシール部材32cを介して、側周面部42cが貫通孔22cの内壁29cに対向するように取付けられている。これにより、側周面部42cと貫通孔22cの内壁29cとで挟まれた空間を、シール部材32cにより気密に保持する。その結果、ウェハWは、開口部44c、開口部48c、開口部31cを介してピック19c(搬送アーム17c)の真空吸引路21cにより真空吸着される。
The
真空吸着パッド20cは、図11に示す例では、平面視における形状が略円形形状(円筒形状)を有しているが、シール部材32cを介して貫通孔22cの内壁29cに気密に取付けられればよく、円形以外の方形等の種々の形状であってもよい。また、平面視における形状が略円形形状を有している場合、真空吸着パッド20cをピック19c(搬送アーム17c)に装着する際の真空吸着パッド20cの水平面内における向きを任意の向きとすることができる。
In the example shown in FIG. 11, the
また、真空吸着パッド20c、シール部材32cの材料は、第1の実施の形態と同様にすることができる。
The materials of the
本実施の形態に係る真空吸着パッド20cは、突起部51cが貫通孔22cの開口部38cに係止されることにより、上下方向に沿う移動のうち、突起部51cが貫通孔22cの開口部38cに係止された状態から更に上方に向かう方向の移動は拘束される。一方、真空吸着パッド20cの側周面部42cと貫通孔22cの内壁29cとは所定の気密空間を隔ててシール部材32cを挟持しながら対向しており、シール部材32cの弾性変形に伴って、真空吸着パッド20cは、上下方向または水平方向に微小移動することができる。
In the
そのため、図12に示すように、ウェハWが湾曲している場合、又はウェハWの表面がピック19c(搬送アーム17c)の保持面(上面)26に平行でない場合にも、シール部材32cの弾性変形に伴って上面部41cを傾けることができる。従って、ウェハWを安定して真空吸着することができる。
Therefore, as shown in FIG. 12, even when the wafer W is curved, or when the surface of the wafer W is not parallel to the holding surface (upper surface) 26 of the
更に、本実施の形態に係る真空吸着パッド20cは、真空吸引路21cが真空吸着パッド20cを介して基板を真空吸着するときに、図12のF1、F2に示すように、ピック19c(搬送アーム17c)の保持面(上面)26側、及び保持面と反対面(下面)27側の両側から、等しく大気圧による力を受ける。従って、真空吸着パッド20cに加えられる圧力が上下ともに等しくバランスしているため、真空吸引のON、OFF時における気圧差の変動によって、真空吸着パッド20cが上下方向に変位することを防止できる。従って、ウェハWを安定して真空吸着することができる。
Furthermore, the
更に、本実施の形態に係る真空吸着パッド20cは、突起部51cが貫通孔22cの下面側の開口部38cに係止された状態で、側周面部42cがシール部材32cを介して貫通孔22cに取付けられている。そのため、例えばピック19c(搬送アーム17c)の下面側から容易に脱着させることができ、真空吸着パッド20cの交換作業を容易に行うことができる。
(第2の実施の形態の変形例)
次に、図13を参照し、本発明の第2の実施の形態の変形例に係る真空吸着パッドについて説明する。
Further, in the
(Modification of the second embodiment)
Next, a vacuum suction pad according to a modification of the second embodiment of the present invention will be described with reference to FIG.
本変形例に係る真空吸着パッド20dは、接触部45dの側周面部42d側に、薄肉部49dを有する点で、第2の実施の形態に係る真空吸着パッドと相違する。
The
図13は、本変形例に係る搬送アームの取付孔に真空吸着パッドが取り付けられている状態を模式的に示す断面図である。 FIG. 13 is a cross-sectional view schematically showing a state in which the vacuum suction pad is attached to the attachment hole of the transfer arm according to this modification.
本変形例に係る真空吸着パッド20dが取付けられるピック19d(搬送アーム17d)、そのピック19d(搬送アーム17d)を有する基板搬送装置16及び基板処理装置1は、第2の実施の形態と同様である。
The pick 19d (
本変形例に係る真空吸着パッド20dも、第2の実施の形態と同様に、上面部41d、側周面部42d、下面部43dを有する。しかしながら、上面部41dに形成された接触部45dと、側周面部42dとの間に、上下方向に沿う厚み寸法の小さな薄肉部49dを有し、上面部41dを含めた本体部50dと、側周面部42dとは、薄肉部49dを介して接続されている。
Similarly to the second embodiment, the
上面部41dの中心に開口部44dが1つ形成されており、開口部44dが2つ以上形成されてもよく、開口部44dが本発明における第1の開口部に相当し、また、上面部41dから突出し、開口部44dを取り囲むように接触部45dが形成されているのは、第2の実施の形態と同様である。
One
また、側周面部42dは、シール部材32dを装着する装着溝46d(装着部)が2つ形成されることに対応し、上下2箇所に設けられる。従って、薄肉部49dも、側周面部42dに対応し、上下2箇所に設けられる。また、側周面部42dは、シール部材32dを装着できればよいので、図13に示すように、シール部材32dの上下方向の厚み寸法と略等しくなるように、上下方向の厚み寸法が小さくてもよい。
Further, the side
また、側周面部42dに、開口部44dと連通する開口部48dが1つ形成されていることは、第2の実施の形態と同様である。
In addition, as in the second embodiment, one
また、真空吸着パッド20dが、装着溝46dに装着されたシール部材32dを介して、側周面部42dが取付穴22dに取付けられ、下面部43dと貫通孔22dの内壁29dとで囲まれた空間を気密に保持し、また、ウェハWが、開口部44d、開口部48d、開口部31dを介してピック19d(搬送アーム17d)の真空吸引路21dにより真空吸着されるのは、第2の実施の形態と同様である。
The
また、シール部材32dとして、Oリングを含めた環状の弾性シール部材を用いることができるのは、第1の実施の形態と同様である。
Further, as in the first embodiment, an annular elastic seal member including an O-ring can be used as the
一方、本変形例では、接触部45dが形成された上面部41dを含む本体部50dと、シール部材32dを装着する装着溝46dが形成された側周面部42dとが薄肉部49dで接続されている。薄肉部49dは、本体部50d及び側周面部42dと比べて上下の厚み寸法が小さいため、変形しやすい。そのため、シール部材32dの弾性変形に伴って上下方向及び水平方向に微小移動することができるのに加え、薄肉部49dの弾性変形に伴って更に上下方向及び水平方向に移動することができる。
On the other hand, in this modification, the
そのため、ウェハWが大きく湾曲している場合、又はウェハWの表面がピック19d(搬送アーム17d)の保持面(上面)26に平行でない場合にも、上面部41dを大きく傾けることができ、ウェハWを安定して真空吸着することができる。
Therefore, even when the wafer W is greatly curved, or when the surface of the wafer W is not parallel to the holding surface (upper surface) 26 of the pick 19d (
なお、薄肉部49dは、第1の実施の形態の第1の変形例と同様に、本体部50d及び側周面部42dと同一の素材により作製されてもよく、本体部50d及び側周面部42dと異なる素材で作製されてもよい。薄肉部49dが本体部50d及び側周面部42dと異なる素材で作製される場合、薄肉部49dにおける変形が更に容易になる。
(第3の実施の形態)
次に、図14を参照し、本発明の第3の実施の形態に係る搬送アーム及び真空吸着パッドについて説明する。
The thin-
(Third embodiment)
Next, a transfer arm and a vacuum suction pad according to a third embodiment of the present invention will be described with reference to FIG.
本実施の形態は、ピック19e(搬送アーム17e)に第1の取付孔22eが形成され、真空吸着パッド100eが、内側パッド20eと、内側パッド20eが取り付けられる第2の取付孔122eが形成された外側パッド120eとを有する点で、第1の実施の形態に係る真空吸着パッド20と相違する。
In the present embodiment, a
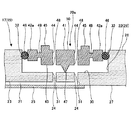
図14は、本実施の形態に係る搬送アームの第1の取付孔に真空吸着パッドが取り付けられている状態を模式的に示す断面図である。 FIG. 14 is a cross-sectional view schematically showing a state where the vacuum suction pad is attached to the first attachment hole of the transfer arm according to the present embodiment.
本実施の形態に係る真空吸着パッド100eが取付けられるピック19e(搬送アーム17e)を有する基板搬送装置16及び基板処理装置1は、第1の実施の形態と同様である。
The
本実施の形態では、ピック19e(搬送アーム17e)には第1の取付孔22eが形成される。第1の取付孔22eは、第1の実施の形態における取付孔22と同様である。ただし、本実施の形態では、図14に示すように、真空吸引路21eと第1の取付孔22eとを連通する取付孔連通路24eは、1つ形成される。従って、第1の取付孔22eの底面30eに取付孔連通路24eが開口する開口部31eは1つ形成される。また、開口部31eは、本発明における第5の開口部に相当する。
In the present embodiment, the first mounting
本実施の形態に係る真空吸着パッド100eは、内側パッド20e、外側パッド120eを有する。
The
内側パッド20eは、上面部41e、第1の側周面部42e、第1の下面部43eを有する。
The
上面部41eの中心に対して互いに対称な位置に開口部44eが2つ形成されており、開口部44eが3つ以上形成されてもよく、1つのみ形成されてもよく、開口部44eが本発明における第1の開口部に相当し、また、上面部41eから突出し、開口部44eを取り囲むように接触部45eが形成されているのは、第1の実施の形態と同様である。
Two
第1の側周面部42eには、第1のシール部材32eを装着する第1の装着溝46e(装着部)が形成されている。第1の装着溝46eは、第1の実施の形態における装着溝46と同様である。
A first mounting
第1の下面部43eには、外側パッド120eに形成された第2の取付孔122eの底面130eに当接する第1の脚部47eが形成されている。第1の脚部47eは、第1の下面部43eの中心に形成されていてもよく、第1の下面部43eの中心でない位置に形成されていてもよい。また、第1の下面部43eには、開口部44eと連通する開口部48eが形成されている。開口部48eは、開口部44eに対応し、3つ以上形成されていてもよく、1つ形成されていてもよい。開口部44eは、本発明における第2の開口部に相当する。
The first
内側パッド20eは、第1の装着溝46eに装着された第1のシール部材32eを介して、第1の側周面部42eが外側パッド120eに形成された第2の取付孔122eの内壁129eに対向するように取付けられている。これにより、第1の下面部43eと第2の取付孔122eの底面130eとで囲まれた空間を、第1のシール部材32eにより気密に保持する。
The
外側パッド120eは、第2の取付孔122eが形成され、第2の側周面部142e、第2の下面部143eを有する。
The outer pad 120e has a
第2の取付孔122eは、外側パッド120eのウェハWを保持する保持面(上面)26側に形成され、外側パッド120eを上下に貫通せず、途中まで形成された凹部である。第2の取付孔122eは、内壁129e及び底面130eを有する。第2の取付孔122eの底面130eには、第2の取付孔122eの底面130eから第2の下面部143eにかけて貫通する貫通孔124eが開口し、開口部144eが形成されている。図14に示す例では、貫通孔124e及び開口部144eが1つずつ形成されている。貫通孔124e及び開口部144eは、2つ以上形成されてもよい。開口部144eは、本発明における第3の開口部に相当する。なお、第2の取付孔122eの平面視での形状は、略円形であってもよく、円形以外の方形等の種々の形状であってもよい。
The
第2の側周面部142eには、第2のシール部材132eを装着する第2の装着溝146eが形成されている。
A
第2の下面部143eには、ピック19e(搬送アーム17e)に形成された第1の取付孔22eの底面30eに当接する第2の脚部147eが形成されている。第2の脚部147eが、第2の下面部143eの中心に形成されていてもよく、第2の下面部143eの中心でない位置に形成されていてもよい。また、第2の下面部143eには、開口部144eと連通する開口部148eが形成されている。開口部148eは、開口部144eに対応し、2つ以上形成されていてもよい。開口部148eは、本発明における第4の開口部に相当する。
The second
外側パッド120eは、第2の装着溝146eに装着された第2のシール部材132eを介して、第2の側周面部142eがピック19e(搬送アーム17e)に形成された第1の取付孔22eの内壁29eに対向するように取付けられている。これにより、第2の下面部143eと第1の取付孔22eの底面30eとで囲まれた空間を、第2のシール部材132eにより気密に保持する。
The outer pad 120e has a first mounting
以上の結果、ウェハWは、開口部44e、開口部48e、開口部144e、開口部148e、開口部31eを介してピック19e(搬送アーム17e)の真空吸引路21eにより真空吸着される。
As a result, the wafer W is vacuum-sucked by the
また、第1のシール部材32e及び第2のシール部材132eとして、Oリングを含めた環状の弾性シール部材を用いることができるのは、第1の実施の形態と同様である。
Further, as in the first embodiment, an annular elastic seal member including an O-ring can be used as the
本実施の形態に係る真空吸着パッド100eは、内側パッド20e、外側パッド120eよりなる二重構造を有しており、内側パッド20eは、第1のシール部材32e、外側パッド120e、第2のシール部材132eを介して第1の取付孔22eに取付けられる。従って、内側パッド20eは、第1のシール部材32e、第2のシール部材132eの2つのシール部材の弾性変形によって上下方向及び水平方向に移動することができるため、比較的単純な構造で基板吸着パッドをウェハの表面に沿って変位させることができる。
(第4の実施の形態)
次に、図15を参照し、本発明の第4の実施の形態に係る搬送アーム及び真空吸着パッドについて説明する。
The
(Fourth embodiment)
Next, a transport arm and a vacuum suction pad according to the fourth embodiment of the present invention will be described with reference to FIG.
本実施の形態は、ピック19f(搬送アーム17f)に第1の貫通孔22fが形成され、ピック19f(搬送アーム17f)が、内側パッド20fと、内側パッド20fが取り付けられる第2の貫通孔122fが形成された外側パッド120fとを有する点で、第2の実施の形態に係る真空吸着パッド20cと相違する。
In the present embodiment, the first through
図15は、本実施の形態に係る搬送アームの第1の貫通孔に真空吸着パッドが取り付けられている状態を模式的に示す断面図である。 FIG. 15 is a cross-sectional view schematically showing a state in which a vacuum suction pad is attached to the first through hole of the transfer arm according to the present embodiment.
本実施の形態に係る真空吸着パッド100fが取付けられるピック19f(搬送アーム17f)を有する基板搬送装置16及び基板処理装置1は、第1の実施の形態と同様である。
The
本実施の形態では、ピック19f(搬送アーム17f)には第1の貫通孔22fが形成される。第1の貫通孔22fは、第2の実施の形態における貫通孔22cと同様である。また、第1の貫通孔22fの内壁29fに形成された、貫通孔連通路24fが開口する開口部31fは、本発明における第5の開口部に相当する。また、貫通孔連通路24fが水平孔33、垂直孔37よりなりL字形状を有すること、加工孔34を有することも、第2の実施の形態と同様である。
In the present embodiment, a first through
本実施の形態に係る真空吸着パッド100fは、内側パッド20f、外側パッド120fを有する。
The
内側パッド20fは、上面部41f、第1の側周面部42f、第1の下面部43fを有する。
The
上面部41fに、上面部41fの中心に開口部44fが1つ形成されており、開口部44fが2つ以上形成されてもよく、開口部44fが本発明における第1の開口部に相当し、また、上面部41fから突出し、開口部44fを取り囲むように接触部45fが形成されているのは、第1の実施の形態と同様である。
One
第1の側周面部42fには、第1のシール部材32fを装着する第1の装着溝46f(装着部)が2つ形成されている。
Two first mounting
また、第1の側周面部42fには、開口部44fと連通する開口部48fが1つ形成されている。開口部48fは、開口部44fに対応し、2つ以上形成されてもよい。開口部48fは、本発明における第2の開口部に相当する。
In addition, one opening 48f communicating with the
第1の下面部43fには、第1の突起部51fが形成されている。第1の突起部51fは、図15に示すように、ピック19f(搬送アーム17f)のウェハWを保持する保持面(上面)26と反対面(下面)27に形成され、外側パッド120fに形成される第2の貫通孔122fを形成する開口部138fの切欠部139fに係止される。第1の突起部51fは、第2の貫通孔122fの断面形状よりも大きな断面形状を有している。
A
内側パッド20fは、第1の装着溝46fに装着された第1のシール部材32fを介して、第1の側周面部42fが外側パッド120fに形成された第2の貫通孔122fの内壁129fに対向するように取付けられている。これにより、第1の側周面部42fと第2の貫通孔122fの内壁129fとで挟まれた空間を、第1のシール部材32fにより気密に保持する。
The
外側パッド120fは、中心に第2の貫通孔122fが形成され、第2の側周面部142f、第2の下面部143fを有する。
The outer pad 120f has a second through-hole 122f at the center, and has a second side
第2の貫通孔122fは、外側パッド120fのウェハWを保持する側の保持面(上面)126から反対面(下面)127まで貫通するように形成された孔である。第2の貫通孔122fの内壁129fには、第2の貫通孔122fと第1の貫通孔22fとを連通する貫通孔124fが開口し、開口部144fが形成されている。図15に示す例では、貫通孔124f及び開口部144fが1つずつ形成されている。貫通孔124f及び開口部144fは、2つ以上形成されてもよい。また、開口部144fは、本発明における第3の開口部に相当する。なお、第2の貫通孔122fの平面視での形状は、略円形であってもよく、円形以外の方形等の種々の形状であってもよい。
The second through hole 122f is a hole formed so as to penetrate from the holding surface (upper surface) 126 on the side of holding the wafer W of the outer pad 120f to the opposite surface (lower surface) 127. On the inner wall 129f of the second through hole 122f, a through
第2の側周面部142fには、第2のシール部材132fを装着する第2の装着溝146fが2つ形成されている。また、第2の側周面部142fには、開口部144fと連通する開口部148fが1つ形成されている。開口部148fは、開口部144fに対応し、2つ以上形成されてもよい。開口部148fは、本発明における第4の開口部に相当する。
Two second mounting
第2の下面部143fには、第2の突起部151fが形成されている。第2の突起部151fは、図15に示すように、外側パッド120fのウェハWを保持する側の保持面(上面)126と反対面(下面)127に形成され、ピック19f(搬送アーム17f)に形成される第1の貫通孔22fを形成する開口部38fの切欠部39fに係止される。第2の突起部151fは、第1の貫通孔22fの断面形状よりも大きな断面形状を有している。
A second projecting
外側パッド120fは、第2の装着溝146fに装着された第2のシール部材132fを介して、第2の側周面部142fがピック19f(搬送アーム17f)に形成された第1の貫通孔22fの内壁29fに対向するように取付けられている。これにより、第2の側周面部142fと第1の貫通孔22fの内壁29fとで挟まれた空間を、第2のシール部材132fにより気密に保持する。
The outer pad 120f has a first through
以上の結果、ウェハWは、開口部44f、開口部48f、開口部144f、開口部148f、開口部31fを介してピック19f(搬送アーム17f)の真空吸引路21fにより真空吸着される。
As a result, the wafer W is vacuum-sucked by the
また、第1のシール部材32f及び第2のシール部材132fとして、Oリングを含めた環状の弾性シール部材を用いることができるのは、第1の実施の形態と同様である。
As in the first embodiment, an annular elastic seal member including an O-ring can be used as the
本実施の形態に係る真空吸着パッド100fも、第3の実施の形態と同様に、内側パッド20f、外側パッド120fよりなる二重構造を有しており、内側パッド20fは、第1のシール部材32f、外側パッド120f、第2のシール部材132fを介して第1の取付孔22fに取付けられる。従って、比較的単純な構造で基板吸着パッドを基板表面に沿って変位させることができる。
Similarly to the third embodiment, the
また、第2の実施の形態と同様に、保持面(上面)26側と反対面(下面)27側の双方から大気圧力が作用するため、これらがバランスして、真空吸着の際に真空吸着パッドが変位しにくい。
(第5の実施の形態)
次に、図16を参照し、本発明の第5の実施の形態に係る真空吸着パッドについて説明する。
Further, as in the second embodiment, since atmospheric pressure acts from both the holding surface (upper surface) 26 side and the opposite surface (lower surface) 27 side, they are balanced and vacuum suction is performed during vacuum suction. The pad is difficult to displace.
(Fifth embodiment)
Next, a vacuum suction pad according to a fifth embodiment of the present invention will be described with reference to FIG.
本実施の形態は、第3の実施の形態に係る内側パッドを、取付孔が形成された外側パッドを介して、搬送アームの貫通孔に取り付けるものである。 In this embodiment, the inner pad according to the third embodiment is attached to the through-hole of the transfer arm via the outer pad in which the attachment hole is formed.
図16は、本実施の形態に係る搬送アームの貫通孔に真空吸着パッドが取り付けられている状態を模式的に示す断面図である。 FIG. 16 is a cross-sectional view schematically showing a state in which the vacuum suction pad is attached to the through hole of the transfer arm according to the present embodiment.
本実施の形態では、真空吸着パッド100gが取付けられるピック19g(搬送アーム17g)を有する基板搬送装置16及び基板処理装置1は、第1の実施の形態と同様である。また、真空吸着パッド100gが取付けられるピック19g(搬送アーム17g)は、第4の実施の形態と同様である。また、真空吸着パッド100gは、内側パッド20g、外側パッド120gを有し、内側パッド20gは、第3の実施の形態に係る内側パッド20eと同様である。
In the present embodiment, the
外側パッド120gは、中心に第2の取付孔122gが形成され、第2の側周面部142g、第2の下面部143gを有する。
The
第2の取付孔122gは、外側パッド120gのウェハWを保持する側の保持面(上面)126に形成され、外側パッド120gの保持面(上面)126から反対面(下面)127まで貫通せず、保持面(上面)126から反対面(下面)127までの途中まで形成された凹部である。第2の取付孔122gの内壁129gには、第2の取付孔122gから第2の側周面部142gにかけて貫通する貫通孔124gが開口し、開口部144gが形成されている。図16に示す例では、貫通孔124g及び開口部144gが1つずつ形成されている。貫通孔124g及び開口部144gは、2つ以上形成されてもよい。開口部144gは、本発明における第3の開口部に相当する。
The
第2の側周面部142gには、第2のシール部材132gを装着する第2の装着溝146g(装着部)が2つ形成されている。第2の装着溝146gは、第4の実施の形態における第2の装着溝146fと同様である。
Two second mounting
また、第2の側周面部142gには、開口部144gと連通する開口部148gが1つ形成されている。開口部148gは、開口部144gに対応し、2つ以上形成されてもよい。開口部148gは、本発明における第4の開口部に相当する。
Further, one opening 148g communicating with the
また、第2の下面部143gには、第4の実施の形態と同様に、第2の突起部151gが形成されている。
Further, a
本実施の形態に係る真空吸着パッド100gも、第3の実施の形態及び第4の実施の形態と同様に、内側パッド20g、外側パッド120gよりなる二重構造を有しており、内側パッド20gは、第1のシール部材32g、外側パッド120g、第2のシール部材132gを介して第1の取付孔22gに取付けられる。従って、比較的単純な構造で基板吸着パッドをウェハの表面に沿って変位させることができる。
Similarly to the third embodiment and the fourth embodiment, the
以上、本発明の好ましい実施の形態について記述したが、本発明はかかる特定の実施の形態に限定されるものではなく、特許請求の範囲内に記載された本発明の要旨の範囲内において、種々の変形・変更が可能である。 The preferred embodiments of the present invention have been described above, but the present invention is not limited to such specific embodiments, and various modifications can be made within the scope of the gist of the present invention described in the claims. Can be modified or changed.
また、本発明に係る基板搬送装置を備えた基板処理装置は、基板処理としてエッチング処理に限定されるものではなく、成膜処理、塗布処理、現像処理、洗浄処理を含めた広範な種類の基板処理を行う基板処理装置に適用可能なものである。 In addition, the substrate processing apparatus provided with the substrate transfer apparatus according to the present invention is not limited to the etching process as the substrate process, but a wide variety of substrates including a film forming process, a coating process, a developing process, and a cleaning process. The present invention is applicable to a substrate processing apparatus that performs processing.
なお、本発明に係る各実施形態においては、下方からウェハを水平に支持する搬送アームに取り付けられる真空吸着パッドについて述べてきたが、本発明は係る向きに限定されるものではない。すなわち、上方からウェハを水平に真空吸着する搬送アームに取り付けられる真空吸着パッドであっても良いし、水平ではなく、垂直や斜め方向にウェハを真空吸着する搬送アームに取り付けられる真空吸着パッドであっても良い。 In each of the embodiments according to the present invention, the vacuum suction pad attached to the transfer arm that horizontally supports the wafer from below has been described, but the present invention is not limited to such a direction. That is, it may be a vacuum suction pad attached to a transfer arm that vacuum-sucks a wafer horizontally from above, or a vacuum suction pad attached to a transfer arm that vacuum-sucks a wafer vertically or obliquely rather than horizontally. May be.
1 基板処理装置
16 基板搬送装置
17 搬送アーム
19 ピック
20 真空吸着パッド
21 真空吸引路
22 取付孔
29 内壁
30 底面
32 シール部材
41 上面部
42 側周面部
43 下面部
45 接触部
46 装着溝
47 脚部
49 薄肉部
50 本体部
51 突起部
DESCRIPTION OF
Claims (9)
第1の開口部を備える内側パッドと、前記内側パッドが取り付けられる第2の取付孔が形成された外側パッドとを有し、
前記内側パッドは、前記第1の開口部が形成された上面部と、第1のシール部材を配置する第1の装着部が形成された第1の側周面部と、前記第2の取付孔の底面に当接する第1の脚部が形成された第1の下面部とを備え、
前記外側パッドは、第2のシール部材を配置する第2の装着部が形成された第2の側周面部と、前記第1の取付孔の底面に当接する第2の脚部が形成された第2の下面部とを備え、
前記第1の側周面部は、前記第1の装着部に配置した前記第1のシール部材を介して、前記第2の取付孔に取り付けられ、
前記第2の側周面部は、前記第2の装着部に配置した前記第2のシール部材を介して、前記第1の取付孔に取り付けられる、
ことを特徴とする真空吸着パッド。 A vacuum suction pad attached to a first mounting hole formed in a transfer arm of a substrate transfer device, connected to a vacuum suction path of the transfer arm, and vacuum-adsorbing a substrate to the transfer arm;
An inner pad provided with a first opening, and an outer pad formed with a second attachment hole to which the inner pad is attached;
The inner pad includes an upper surface portion on which the first opening is formed, a first side peripheral surface portion on which a first mounting portion for disposing a first seal member is formed, and the second mounting hole. A first lower surface portion formed with a first leg portion that contacts the bottom surface of
The outer pad has a second side peripheral surface portion on which a second mounting portion for disposing a second seal member is formed, and a second leg portion that contacts the bottom surface of the first mounting hole. A second lower surface portion,
The first side peripheral surface portion is attached to the second attachment hole via the first seal member disposed in the first mounting portion,
The second side peripheral surface portion is attached to the first attachment hole via the second seal member disposed in the second mounting portion.
A vacuum suction pad characterized by that.
前記第2のシール部材は、前記第2の下面部と前記第1の取付孔の底面とで挟まれた空間の気密を確保する、
ことを特徴とする請求項1に記載の真空吸着パッド。 The first seal member ensures airtightness of a space sandwiched between the first lower surface portion and the bottom surface of the second mounting hole,
The second seal member ensures airtightness of a space sandwiched between the second lower surface portion and the bottom surface of the first attachment hole.
The vacuum suction pad according to claim 1 .
前記第2の取付孔は、該第2の取付孔の底面に第3の開口部を有し、
前記第2の下面部は、前記第3の開口部と連通する第4の開口部を有し、
前記第1の取付孔は、該第1の取付孔の底面に第5の開口部を有し、
前記内側パッドに当接した前記基板は、該内側パッドの前記上面部の前記第1の開口部と連通する前記第2の開口部、前記第3の開口部、前記第4の開口部及び前記第5の開口部を介して、該上面部に真空吸着される、
ことを特徴とする請求項1又は請求項2に記載の真空吸着パッド。 The first lower surface portion has a second opening communicating with the first opening,
The second mounting hole has a third opening on the bottom surface of the second mounting hole,
The second lower surface portion has a fourth opening communicating with the third opening,
The first mounting hole has a fifth opening on the bottom surface of the first mounting hole;
The substrate in contact with the inner pad includes the second opening, the third opening, the fourth opening, and the communication between the first opening on the upper surface of the inner pad. The upper surface is vacuum-adsorbed through the fifth opening,
The vacuum suction pad according to claim 1 or 2 , characterized by the above.
前記真空吸着パッドに当接した前記基板は、前記第2の開口部及び前記第3の開口部を介して、真空吸着される、
ことを特徴とする請求項7に記載の搬送アーム。 The mounting hole has a third opening on the bottom surface of the mounting hole;
The substrate in contact with the vacuum suction pad is vacuum-sucked through the second opening and the third opening.
The transfer arm according to claim 7 .
A substrate transfer apparatus comprising the transfer arm according to claim 7 .
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2009173195A JP5379589B2 (en) | 2009-07-24 | 2009-07-24 | Vacuum suction pad, transfer arm and substrate transfer device |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2009173195A JP5379589B2 (en) | 2009-07-24 | 2009-07-24 | Vacuum suction pad, transfer arm and substrate transfer device |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2011029388A JP2011029388A (en) | 2011-02-10 |
| JP2011029388A5 JP2011029388A5 (en) | 2012-11-01 |
| JP5379589B2 true JP5379589B2 (en) | 2013-12-25 |
Family
ID=43637800
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2009173195A Expired - Fee Related JP5379589B2 (en) | 2009-07-24 | 2009-07-24 | Vacuum suction pad, transfer arm and substrate transfer device |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP5379589B2 (en) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR20200001966A (en) | 2018-06-28 | 2020-01-07 | 히라따기꼬오 가부시키가이샤 | Alignment device, semiconductor wafer processing device, and alignment method |
Families Citing this family (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP5345167B2 (en) * | 2011-03-18 | 2013-11-20 | 東京エレクトロン株式会社 | Substrate holding device |
| JP6224437B2 (en) * | 2013-11-26 | 2017-11-01 | 東京エレクトロン株式会社 | Substrate transfer device |
| JP6032234B2 (en) | 2014-03-19 | 2016-11-24 | 信越半導体株式会社 | Work holding device |
| JP6298099B2 (en) | 2016-05-18 | 2018-03-20 | キヤノントッキ株式会社 | Substrate transfer device |
| US11315823B2 (en) | 2019-12-27 | 2022-04-26 | Kawasaki Jukogyo Kabushiki Kaisha | Substrate suction-holding structure and substrate transfer robot |
| TW202418470A (en) | 2022-06-06 | 2024-05-01 | 日商東京威力科創股份有限公司 | Mounting pad, mounting mechanism, and substrate transfer mechanism |
Family Cites Families (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH08143147A (en) * | 1994-11-18 | 1996-06-04 | Metsukusu:Kk | Sucking device for sheet-form work |
| JP3282787B2 (en) * | 1996-07-29 | 2002-05-20 | 東京エレクトロン株式会社 | Wafer transfer mechanism |
| JP3782523B2 (en) * | 1996-09-12 | 2006-06-07 | オリンパス株式会社 | Substrate adsorption member and apparatus |
| JP3408780B2 (en) * | 2000-06-05 | 2003-05-19 | 株式会社しなのエレクトロニクス | Vacuum gripper and IC test handler |
| JP3917528B2 (en) * | 2003-01-07 | 2007-05-23 | エスペック株式会社 | Suction pad |
| JP2006073946A (en) * | 2004-09-06 | 2006-03-16 | Fuji Mach Mfg Co Ltd | Glass substrate feeder |
| JP4790395B2 (en) * | 2005-12-02 | 2011-10-12 | オリンパス株式会社 | Substrate adsorption mechanism and substrate inspection device |
-
2009
- 2009-07-24 JP JP2009173195A patent/JP5379589B2/en not_active Expired - Fee Related
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR20200001966A (en) | 2018-06-28 | 2020-01-07 | 히라따기꼬오 가부시키가이샤 | Alignment device, semiconductor wafer processing device, and alignment method |
| US11232962B2 (en) | 2018-06-28 | 2022-01-25 | Hirata Corporation | Alignment device, semiconductor wafer processing device, and alignment method |
Also Published As
| Publication number | Publication date |
|---|---|
| JP2011029388A (en) | 2011-02-10 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5379589B2 (en) | Vacuum suction pad, transfer arm and substrate transfer device | |
| US8171964B2 (en) | Apparatus and method for opening/closing lid of closed container, gas replacement apparatus using same, and load port apparatus | |
| TWI412101B (en) | Substrate holder, substrate conveyance apparatus, and substrate processing apparatus | |
| JP7109927B2 (en) | end effector | |
| JP2016525281A (en) | Processing equipment including on-the-fly substrate centering | |
| JP2002324831A (en) | Vacuum suction table | |
| JP2009117567A (en) | Vacuum chuck | |
| KR100337278B1 (en) | Container and method for sealing the container | |
| TW201611154A (en) | Wafer loading and unloading | |
| KR20210059693A (en) | Load port apparatus and method of driving the same | |
| JP5016523B2 (en) | Vacuum chuck | |
| JP7560243B2 (en) | Ring frame retention mechanism | |
| JP7250525B2 (en) | Wafer transfer tray | |
| KR20140120822A (en) | Chuck table | |
| JP7364692B2 (en) | Substrate suction holding structure and substrate transfer robot | |
| JP2000195927A (en) | Vacuum chuck device | |
| JP6340928B2 (en) | Wafer loading device | |
| JP5749002B2 (en) | Load lock device and vacuum processing device | |
| JP2010027809A (en) | Conveying device provided with opening/closing mechanism of container for conveying workpiece | |
| JPH09225768A (en) | Board holding device | |
| TWI662643B (en) | Method for manufacturing photomask, plasma process device, and frame | |
| JP6496919B2 (en) | Bernoulli hand and semiconductor manufacturing equipment | |
| JP2004349619A (en) | Interface seal | |
| JP2022065559A (en) | Load lock chamber, substrate processing device, and substrate conveyance method | |
| JP4776560B2 (en) | Vacuum processing equipment |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20120626 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20120912 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20130611 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20130613 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20130724 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20130910 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20130927 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 5379589 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| LAPS | Cancellation because of no payment of annual fees |