JP5367577B2 - 患者看護教授用インタラクティブ(対話型)教育システム - Google Patents
患者看護教授用インタラクティブ(対話型)教育システム Download PDFInfo
- Publication number
- JP5367577B2 JP5367577B2 JP2009531570A JP2009531570A JP5367577B2 JP 5367577 B2 JP5367577 B2 JP 5367577B2 JP 2009531570 A JP2009531570 A JP 2009531570A JP 2009531570 A JP2009531570 A JP 2009531570A JP 5367577 B2 JP5367577 B2 JP 5367577B2
- Authority
- JP
- Japan
- Prior art keywords
- simulator
- fetal
- fetal simulator
- compressor
- sensor
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images
















Classifications
-
- G—PHYSICS
- G09—EDUCATION; CRYPTOGRAPHY; DISPLAY; ADVERTISING; SEALS
- G09B—EDUCATIONAL OR DEMONSTRATION APPLIANCES; APPLIANCES FOR TEACHING, OR COMMUNICATING WITH, THE BLIND, DEAF OR MUTE; MODELS; PLANETARIA; GLOBES; MAPS; DIAGRAMS
- G09B23/00—Models for scientific, medical, or mathematical purposes, e.g. full-sized devices for demonstration purposes
- G09B23/28—Models for scientific, medical, or mathematical purposes, e.g. full-sized devices for demonstration purposes for medicine
- G09B23/281—Models for scientific, medical, or mathematical purposes, e.g. full-sized devices for demonstration purposes for medicine for pregnancy, birth or obstetrics
-
- G—PHYSICS
- G09—EDUCATION; CRYPTOGRAPHY; DISPLAY; ADVERTISING; SEALS
- G09B—EDUCATIONAL OR DEMONSTRATION APPLIANCES; APPLIANCES FOR TEACHING, OR COMMUNICATING WITH, THE BLIND, DEAF OR MUTE; MODELS; PLANETARIA; GLOBES; MAPS; DIAGRAMS
- G09B23/00—Models for scientific, medical, or mathematical purposes, e.g. full-sized devices for demonstration purposes
- G09B23/28—Models for scientific, medical, or mathematical purposes, e.g. full-sized devices for demonstration purposes for medicine
-
- G—PHYSICS
- G16—INFORMATION AND COMMUNICATION TECHNOLOGY [ICT] SPECIALLY ADAPTED FOR SPECIFIC APPLICATION FIELDS
- G16H—HEALTHCARE INFORMATICS, i.e. INFORMATION AND COMMUNICATION TECHNOLOGY [ICT] SPECIALLY ADAPTED FOR THE HANDLING OR PROCESSING OF MEDICAL OR HEALTHCARE DATA
- G16H50/00—ICT specially adapted for medical diagnosis, medical simulation or medical data mining; ICT specially adapted for detecting, monitoring or modelling epidemics or pandemics
- G16H50/50—ICT specially adapted for medical diagnosis, medical simulation or medical data mining; ICT specially adapted for detecting, monitoring or modelling epidemics or pandemics for simulation or modelling of medical disorders
-
- G—PHYSICS
- G16—INFORMATION AND COMMUNICATION TECHNOLOGY [ICT] SPECIALLY ADAPTED FOR SPECIFIC APPLICATION FIELDS
- G16Z—INFORMATION AND COMMUNICATION TECHNOLOGY [ICT] SPECIALLY ADAPTED FOR SPECIFIC APPLICATION FIELDS, NOT OTHERWISE PROVIDED FOR
- G16Z99/00—Subject matter not provided for in other main groups of this subclass
Landscapes
- Engineering & Computer Science (AREA)
- Health & Medical Sciences (AREA)
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Medical Informatics (AREA)
- General Health & Medical Sciences (AREA)
- Business, Economics & Management (AREA)
- Theoretical Computer Science (AREA)
- Computational Mathematics (AREA)
- Medicinal Chemistry (AREA)
- Mathematical Analysis (AREA)
- Mathematical Optimization (AREA)
- Mathematical Physics (AREA)
- Pure & Applied Mathematics (AREA)
- Chemical & Material Sciences (AREA)
- Educational Administration (AREA)
- Educational Technology (AREA)
- Algebra (AREA)
- Public Health (AREA)
- Gynecology & Obstetrics (AREA)
- Pregnancy & Childbirth (AREA)
- Reproductive Health (AREA)
- Biomedical Technology (AREA)
- Data Mining & Analysis (AREA)
- Databases & Information Systems (AREA)
- Pathology (AREA)
- Epidemiology (AREA)
- Primary Health Care (AREA)
- Instructional Devices (AREA)
Description
患者看護教育における別の課題は、ユーザに教えるために用いる患者シミュレータが受動的であることである。例えば、出産のシミュレーションにおいて、ユーザはシミュレーション用胎児をシミュレートされた母体の骨盤内に配置し、これを産道経由で降ろし、胎児の頭部を娩出させ、胎児を約90°回転させて肩を娩出させ、最後に胎児を引き出す(この時点で「新生児」と称することになる)必要がある。実際の分娩における一連の事象を模倣している一方で、ユーザが胎児を物理的に操作するということで迫真性に欠けており、患者看護を行う難しさを察しにくくなる。実際の分娩においては、胎児にアクセスすることはできず、ほとんどの動きは隠れて見えないようになっており、先行技術によるシステムは出産中に患者看護を提供するという最も難しい状況に対応していない。さらに、先行技術によるシステムは、胎児が産道を通って降りて来る時の子宮頚部拡張をシミュレーションしないため、学生が分娩の段階を評価したり、分娩の進展を評価するための子宮頚部拡張の対時間拡張図(「分娩記録」)を作成することができない。
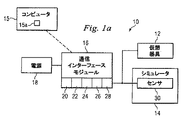
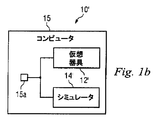
患者看護教育におけるさらに別の課題は、システムがかさばり過ぎ、また、他の構成部品への必要配線接続の本数が多過ぎることが多く、そのため、シミュレータを他の位置に動かしにくいことである。「可搬式」と称されているシステムでも、シミュレータを完全に機能させるためには、コンプレッサや電源など数多く接続部品を移動する必要があることが多い。この課題の解決策は、外部装置とワイヤレスで通信する完全機能型・独立式シミュレータにすることである。従って、より現実に近いシミュレーション用患者を含む、患者看護訓練セッションの実施に用いるインタラクティブ教育システム用のシステムが必要である。
【先行技術文献】
【特許文献】
Claims (31)
- 患者看護をユーザに教授するためのインタラクティブ教育システムであって、
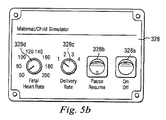
少なくとも母体の心拍数および呼吸数をシミュレートする母体シミュレータと、
少なくとも胎児の心拍数および呼吸数をシミュレートする胎児シミュレータと、
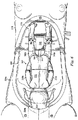
前記母体シミュレータに設けられ、前記胎児シミュレータを前記母体シミュレータ内に保持すると共に出産シミュレーションにおいて並進運動および選択的回転運動を胎児シミュレータに提供する出産運動提供機構と、
前記出産運動提供機構もしくは前記胎児シミュレータに設けられ、前記出産運動提供機構と前記胎児シミュレータを取り外し不能にロックするロック機構と、
前記ロック機構に接続されたアクチュエータであって、外部からのロック解除指令を受信し、これに基づいて前記ロック機構を駆動して前記ロックの解除を行うアクチュエータと
を有するシステム。 - 請求項1記載のシステムにおいて、前記ロック解除指令は外部のコンピュータから受信するものである。
- 請求項1記載のシステムにおいて、前記アクチュエータはソレノイドである。
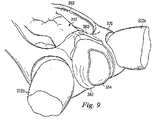
- 請求項1記載のシステムにおいて、前記胎児シミュレータは、前記出産シミュレーションにおいて、前記胎児シミュレータの吸引分娩を容易にするようになっている頭部を有するものである。
- 請求項4記載のシステムにおいて、前記胎児シミュレータは、前記出産シミュレーション中に前記頭部に加えられた力を監視するための頭部センサを有するものである。
- 請求項5記載のシステムにおいて、前記頭部センサは、前記頭部に近接した、前記シミュレータの頸部に配置されるものである。
- 請求項5記載のシステムにおいて、このシステムは、さらに、
前記頭部センサと通信する出力装置を有し、この出力装置は前記加えられた力の量に基づいて出力を供給するように動作可能である。 - 請求項1記載のシステムにおいて、前記ロック機構は前記胎児シミュレータの胴体内に配置されるものである。
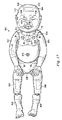
- 請求項1記載のシステムにおいて、前記胎児シミュレータは、2つの肩部と、各肩部内に配置された肩センサとを含み、この肩センサにより前記出産シミュレーション中に前記肩部に加えられた力が監視されるものである。
- 請求項1記載のシステムにおいて、前記胎児シミュレータは、2つの股関節部と、各股関節内の股関節部センサとを含み、この股関節部センサにより前記出産シミュレーション中に前記股関節部に加えられた力が監視されるものである。
- 請求項1記載のシステムにおいて、前記胎児シミュレータは、前記出産シミュレーション中に前記胎児シミュレータに加えられた力を監視するセンサを有するものである。
- 請求項11記載のシステムにおいて、このシステムは、さらに、
前記センサと通信する出力装置を有し、この出力装置は前記胎児シミュレータに加えられた力の量に基づいて出力を供給するように動作可能である。 - 請求項1記載のシステムにおいて、前記胎児シミュレータは、シミュレートされた心臓および肺を含む人体の少なくとも一部位の模型を有するものである。
- 請求項13記載のシステムにおいて、前記胎児シミュレータは、28週および40週からな成るグループから選択される在胎期間におけるほぼ平均的なサイズの新生児のサイズである。
- 請求項13記載のシステムにおいて、前記胎児シミュレータは、呼吸をシミュレートするために前記肺に接続された空気供給システムを有するものである。
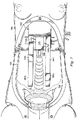
- 請求項15記載のシステムにおいて、前記空気供給システムは、コンプレッサと、前記コンプレッサに接続された一次アキュムレータと、前記コンプレッサに接続された二次アキュムレータと、前記コンプレッサと通信して当該コンプレッサの出力圧力を制御するためのコンプレッサ・コントローラとを有するものである。
- 請求項16記載のシステムにおいて、前記コンプレッサは、騒音遮断体(noise barrier)により絶縁されているものである。
- 請求項17記載のシステムにおいて、前記騒音遮断体は、遮音体(acoustic barrier)物質で作られた第一の層と、マスバリヤ(mass barrier)物質で作られた第二の層とを有する。
- 請求項17記載のシステムにおいて、前記コンプレッサおよび前記騒音遮断体は、前記胎児シミュレータの頭部内に配置され、前記一次および二次アキュムレータは、前記胎児シミュレータの一対の脚内に配置されるものである。
- 請求項15記載のシステムにおいて、前記空気供給システムは、シミュレートされた循環系と接続されているものである。
- 請求項20記載のシステムにおいて、前記空気供給システムは、さらに、前記シミュレートされた循環系に、シミュレートされた脈拍を提供するようになっているものである。
- 請求項21記載のシステムにおいて、前記胎児シミュレータは、中枢部と、当該中枢部から距離をおいて放射状に配置された末梢部と、前記胎児シミュレータのチアノーゼをシミュレートするために、前記中枢部および前記末梢部の色彩を独立して変化させる機構とを有するものである。
- 請求項1記載のシステムにおいて、前記母体シミュレータは、外部装置と物理的に接続されることなく動作可能であり、
前記胎児シミュレータは、前記母体シミュレータと分離されるとき、外部装置と物理的に接続されることなく動作可能である
システム。 - 請求項23記載のシステムにおいて、前記母体シミュレータは、さらに、
内部電源を含むものである。 - 請求項24記載のシステムにおいて、前記内部電源は、少なくとも1の充電池を有するものである。
- 請求項23記載のシステムにおいて、前記胎児シミュレータは、シミュレートされた心臓および肺を含む人体の少なくとも一部位の模型を有するものである。
- 請求項26記載のシステムにおいて、前記胎児シミュレータは、呼吸をシミュレートするために前記肺に接続された空気供給システムを含み、前記空気供給システムは、コンプレッサと、前記コンプレッサに接続された一次アキュムレータと、前記コンプレッサに接続された二次アキュムレータと、前記コンプレッサと通信して当該コンプレッサの出力圧力を制御するためのコンプレッサ・コントローラとを有するものである。
- 請求項27記載のシステムにおいて、前記コンプレッサは、騒音遮断体で絶縁されており、前記騒音遮断体は、遮音体物質で作られた第一の層と、マスバリヤ物質で作られた第二の層とを有するものである。
- 請求項28記載のシステムにおいて、前記コンプレッサおよび前記騒音遮断体は、前記胎児シミュレータの頭部内に配置され、前記一次および二次アキュムレータは、前記胎児シミュレータの一対の脚内に配置されるものである。
- 請求項23記載のシステムにおいて、前記母体シミュレータの前記出産運動提供機構の一部は、前記胎児シミュレータに回転運動を提供する第一の位置と前記胎児シミュレータに回転運動を提供しない第二の位置との間で選択的に移動可能である。
- 請求項30記載のシステムにおいて、前記出産運動提供機構の一部は、前記第一の位置と前記第二の位置との間の第三の位置に選択的に移動可能であり、前記第三の位置においては、前記第一の位置よりも、前記胎児シミュレータに提供される回転運動量が少ないものである。
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| US11/538,306 US7811090B2 (en) | 1996-05-08 | 2006-10-03 | Interactive education system for teaching patient care |
| US11/538,306 | 2006-10-03 | ||
| PCT/US2007/080252 WO2008042931A1 (en) | 2006-10-03 | 2007-10-03 | Interactive education system for teaching patient care |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2010506217A JP2010506217A (ja) | 2010-02-25 |
| JP2010506217A5 JP2010506217A5 (ja) | 2010-12-02 |
| JP5367577B2 true JP5367577B2 (ja) | 2013-12-11 |
Family
ID=39060320
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2009531570A Active JP5367577B2 (ja) | 2006-10-03 | 2007-10-03 | 患者看護教授用インタラクティブ(対話型)教育システム |
Country Status (4)
| Country | Link |
|---|---|
| US (8) | US7811090B2 (ja) |
| EP (1) | EP2074541B1 (ja) |
| JP (1) | JP5367577B2 (ja) |
| WO (1) | WO2008042931A1 (ja) |
Families Citing this family (77)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US8696362B2 (en) | 1996-05-08 | 2014-04-15 | Gaumard Scientific Company, Inc. | Interactive education system for teaching patient care |
| US20090148822A1 (en) | 2007-12-07 | 2009-06-11 | Gaumard Scientific Company, Inc. | Interactive Education System for Teaching Patient Care |
| US7976312B2 (en) * | 1996-05-08 | 2011-07-12 | Gaumard Scientific Company, Inc. | Interactive education system for teaching patient care |
| US7811090B2 (en) | 1996-05-08 | 2010-10-12 | Gaumard Scientific Company, Inc. | Interactive education system for teaching patient care |
| US8016598B2 (en) | 1996-05-08 | 2011-09-13 | Gaumard Scientific Company, Inc. | Interactive education system for teaching patient care |
| US7976313B2 (en) | 2000-08-17 | 2011-07-12 | Gaumard Scientific Company, Inc. | Interactive education system for teaching patient care |
| AU2005299678B2 (en) * | 2004-10-25 | 2011-04-07 | Eastern Virginia Medical School | System, method and medium for simulating normal and abnormal medical conditions |
| US7520860B2 (en) | 2005-04-13 | 2009-04-21 | Marie G. Johnson | Detection of coronary artery disease using an electronic stethoscope |
| WO2008018889A2 (en) * | 2005-09-29 | 2008-02-14 | The General Hospital Corporation | Medical training system for casualty simulation |
| WO2008008893A2 (en) * | 2006-07-12 | 2008-01-17 | Medical Cyberworlds, Inc. | Computerized medical training system |
| US8364249B2 (en) * | 2006-08-11 | 2013-01-29 | 3M Innovative Properties Company | Automatic generation of heart sounds and murmurs using a lumped-parameter recirculating pressure-flow model for the left heart |
| US10186172B2 (en) | 2007-05-21 | 2019-01-22 | Jc3 Innovations, Llc | Blood glucose testing and monitoring system and method |
| US9905135B2 (en) | 2007-05-21 | 2018-02-27 | Jc3 Innovations, Llc | Medical device and procedure simulation and training |
| US9886874B2 (en) | 2007-05-21 | 2018-02-06 | Johnson County Community College Foundation, Inc. | Medical device and procedure simulation and training |
| US9892659B2 (en) | 2007-05-21 | 2018-02-13 | Johnson County Community College Foundation, Inc. | Medical device and procedure simulation and training |
| US9916773B2 (en) * | 2007-05-21 | 2018-03-13 | Jc3 Innovations, Llc | Medical device and procedure simulation and training |
| WO2009018334A2 (en) * | 2007-07-30 | 2009-02-05 | Monster Medic, Inc. | Systems and methods for remote controlled interactive training and certification |
| US20090061405A1 (en) * | 2007-08-28 | 2009-03-05 | Mommy With A Tummy Tm, Corporation | Doll with revolving abdominal chamber to simulate pregnancy |
| AU2008302348A1 (en) | 2007-09-17 | 2009-03-26 | Government Of The United States As Represented By The Secretary Of The Army | Obstetrics simulation and training method and system |
| NO20080200L (no) * | 2008-01-11 | 2009-07-13 | Laerdal Medical As | Mannequin med kjoleplate |
| WO2009088308A2 (en) * | 2008-01-11 | 2009-07-16 | Laerdal Medical As | Method, system and computer program product for providing a simulation with advance notification of events |
| NL1036036C (nl) * | 2008-10-08 | 2010-04-09 | Univ Eindhoven Tech | Patiëntsimulator. |
| US8460003B2 (en) * | 2009-07-10 | 2013-06-11 | K-Force Government Solutions | Anthropomorphic device for military and civilian emergency medical treatment training |
| US20120270197A1 (en) * | 2009-10-12 | 2012-10-25 | Mayo Foundation For Medical Education And Research | Physiology simulation garment, systems and methods |
| KR101808801B1 (ko) | 2009-12-17 | 2017-12-13 | 라엘덜 메디칼 에이에스 | 산모 시뮬레이션 장치 |
| US20110250578A1 (en) * | 2010-04-13 | 2011-10-13 | Northern Alberta Institute Of Technology | Ventilator test lung and trigger assembly |
| JP5682948B2 (ja) * | 2010-06-22 | 2015-03-11 | 株式会社モリタ製作所 | スキン部材 |
| FR2966967B1 (fr) * | 2010-11-02 | 2012-12-07 | Univ Aix Marseille Ii | Simulateur destine a l'apprentissage de l'intubation tracheale |
| US20120171652A1 (en) * | 2010-12-15 | 2012-07-05 | Sparks Jessica L | Pressure Ulcer Simulator and Related Methods |
| US9847044B1 (en) | 2011-01-03 | 2017-12-19 | Smith & Nephew Orthopaedics Ag | Surgical implement training process |
| US10354555B2 (en) * | 2011-05-02 | 2019-07-16 | Simbionix Ltd. | System and method for performing a hybrid simulation of a medical procedure |
| GB2490698A (en) | 2011-05-11 | 2012-11-14 | Laerdal Medical As | Medical simulation system |
| JP5754708B2 (ja) * | 2011-05-26 | 2015-07-29 | 国立大学法人 千葉大学 | 聴診トレーニングシステム及び模擬聴診器 |
| EP2801086B1 (en) * | 2012-01-05 | 2018-03-14 | MUSC Foundation For Research Development | Systems, devices, and methods for simulating fetal delivery |
| US9240130B2 (en) | 2012-01-27 | 2016-01-19 | Gaumard Scientific Company, Inc. | Combat medical simulators and associated systems and methods |
| US9472123B2 (en) | 2012-01-27 | 2016-10-18 | Gaumard Scientific Company, Inc. | Human tissue models, materials, and methods |
| US9123261B2 (en) | 2012-01-28 | 2015-09-01 | Gaumard Scientific Company, Inc. | Surgical simulation models, materials, and methods |
| WO2013142761A1 (en) * | 2012-03-22 | 2013-09-26 | Paul Jacques Charles Lecat | Auscultation training apparatus and method |
| US8942800B2 (en) | 2012-04-20 | 2015-01-27 | Cardiac Science Corporation | Corrective prompting system for appropriate chest compressions |
| US9489870B2 (en) | 2013-01-26 | 2016-11-08 | Gaumard Scientific Company, Inc. | Medical simulators with energy harvesting power supplies |
| US9721482B2 (en) | 2013-01-26 | 2017-08-01 | Gaumard Scientific Company, Inc. | Pregnant abdominal system and associated devices, systems, and methods |
| US9501953B2 (en) | 2013-03-15 | 2016-11-22 | Gaumard Scientific Company, Inc. | Birthing simulation devices, systems, and methods |
| US10319256B2 (en) * | 2013-04-10 | 2019-06-11 | Pocket Nurse Enterprises, Inc. | Device for simulating analysis of blood glucose levels |
| WO2014172331A2 (en) * | 2013-04-15 | 2014-10-23 | The General Hospital Corporation | System and method for improved medical simulator |
| US9852658B2 (en) * | 2013-06-28 | 2017-12-26 | Cae Healthcare Canada Inc. | System for moving an anatomical model of a fetus inside a mannequin having a birth canal and a childbirth simulator |
| US20150004584A1 (en) * | 2013-06-29 | 2015-01-01 | Cae Healthcare Canada | Modular patient simulating mannequin and method thereof |
| WO2015035008A1 (en) * | 2013-09-04 | 2015-03-12 | The Children's Hospital Of Philadelphia | Apparatus and method for teaching intussusception reduction |
| US9576503B2 (en) | 2013-12-27 | 2017-02-21 | Seattle Children's Hospital | Simulation cart |
| US10297169B2 (en) | 2014-01-05 | 2019-05-21 | Health Research, Inc. | Intubation simulator and method |
| CN106160032A (zh) * | 2015-03-27 | 2016-11-23 | 苏州速迈医疗设备有限公司 | 一种无线式诊断系统电源 |
| US9747816B2 (en) * | 2015-07-22 | 2017-08-29 | Joni L. Chenoweth | Pregnancy education dolls |
| US10354558B2 (en) * | 2015-08-27 | 2019-07-16 | Tusker Medical, Inc. | System and method for training use of pressure equalization tube delivery instrument |
| WO2017064249A1 (en) * | 2015-10-16 | 2017-04-20 | Virtamed Ag | Ultrasound simulation methods |
| JP6647526B2 (ja) * | 2016-03-01 | 2020-02-14 | 株式会社国際電気通信基礎技術研究所 | 聴診トレーニングシステムおよび模擬採音部 |
| US10720082B1 (en) | 2016-09-08 | 2020-07-21 | Ctskh, Llc | Device and system to teach stem lessons using hands-on learning method |
| WO2018118858A1 (en) | 2016-12-19 | 2018-06-28 | National Board Of Medical Examiners | Medical training and performance assessment instruments, methods, and systems |
| CN106816075A (zh) * | 2017-03-23 | 2017-06-09 | 四川大学华西第二医院 | 一种可活动颅骨的胎儿模型 |
| CN106997711B (zh) * | 2017-04-17 | 2022-11-04 | 营口巨成教学科技开发有限公司 | 一种孕妇分娩教学用仿真胎儿及内置有该胎儿的教学用模拟孕妇 |
| CN106960624B (zh) * | 2017-04-17 | 2022-11-25 | 营口巨成教学科技开发有限公司 | 一种四步触诊法教学方法及所用的仿真孕妇 |
| US10555679B2 (en) * | 2017-06-20 | 2020-02-11 | General Electric Company | Non-contact heart rate monitoring |
| AT520146B1 (de) * | 2017-06-28 | 2019-03-15 | Simcharacters Gmbh | Patientensimulator |
| US11074832B2 (en) * | 2017-08-16 | 2021-07-27 | Tellyes Scientific Inc. | Warming of simulated blood using waste heat generated by electronic components |
| EP4243003B1 (en) * | 2017-08-16 | 2025-03-05 | Gaumard Scientific Company, Inc. | Augmented reality system for teaching patient care |
| CN107862967B (zh) * | 2017-12-26 | 2022-08-02 | 营口市贵东医疗器械制造有限公司 | 高仿真产科手术模拟训练标准化病人 |
| EP3737475A4 (en) | 2018-02-16 | 2021-03-24 | University Of Louisville Research Foundation, Inc. | RESPIRATORY TRAINING AND RESPIRATORY PRESSURE MONITORING DEVICE |
| WO2020185556A1 (en) * | 2019-03-08 | 2020-09-17 | Musara Mubayiwa Cornelious | Adaptive interactive medical training program with virtual patients |
| CZ308074B6 (cs) * | 2019-04-15 | 2019-12-11 | Vs Banska Technicka Univerzita Ostrava | Fantom pro kontinuální generování fetálního a mateřského elektrokardiogramu |
| CN111007902B (zh) * | 2019-11-12 | 2022-01-28 | 珠海格力电器股份有限公司 | 一种基于摄像头的母婴动作监测系统及方法、智能家居 |
| CN111081127A (zh) * | 2019-11-21 | 2020-04-28 | 泉州医学高等专科学校 | 一种助产技术的仿真模拟系统 |
| GB2591779B (en) | 2020-02-06 | 2021-12-29 | S Haval Sagar | A system for simulation training of extra corporeal life support therapies |
| GB2595942B (en) * | 2020-08-04 | 2022-06-15 | Kane Zeinab | Method and apparatus for outputting pregnancy movements |
| WO2023086536A1 (en) | 2021-11-12 | 2023-05-19 | Avkin, Inc. | Wearable birthing simulators |
| WO2023113649A1 (ru) * | 2021-12-14 | 2023-06-22 | Арина Евгеньевна Тополева | Стенд для демонстрации массажного воздействия устройством на тело человека, способ его использования и способ его изготовления |
| US12374236B2 (en) | 2022-01-27 | 2025-07-29 | Fresenius Medical Care Holdings, Inc. | Dialysis training using dialysis treatment simulation system |
| US12502465B2 (en) | 2022-03-30 | 2025-12-23 | Fresenius Medical Care Holdings, Inc. | Dialysis treatment file simulation and verification system |
| TWM651854U (zh) * | 2023-08-28 | 2024-02-21 | 艾克斯國際有限公司 | 出血止血回饋系統 |
| CN117765802B (zh) * | 2024-02-21 | 2024-05-31 | 厦门立方幻境科技有限公司 | 一种分娩操作模拟用的仿真教具 |
Family Cites Families (177)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US3125826A (en) | 1964-03-24 | Animated doll with sounding means | ||
| US2551433A (en) | 1949-12-27 | 1951-05-01 | Julia O Graves | Educational apparatus for teaching obstetrics and midwifery |
| US2871579A (en) | 1956-05-31 | 1959-02-03 | John V Nuranen | Surgical body-member simulacrum for teaching first aid |
| US3154881A (en) | 1960-12-28 | 1964-11-03 | Product Design & Dev Corp | Animated doll |
| US3520071A (en) | 1968-01-29 | 1970-07-14 | Aerojet General Co | Anesthesiological training simulator |
| US3557471A (en) | 1968-09-16 | 1971-01-26 | Wyle Laboratories | Anthropodynamic dummy |
| US3605580A (en) | 1969-06-26 | 1971-09-20 | Bernard Miller | Mobile extruder for forming street curbs |
| GB1232970A (ja) | 1969-08-08 | 1971-05-26 | ||
| US3641703A (en) | 1970-03-09 | 1972-02-15 | Topper Corp | Animated doll responsive to mouth-inserted element |
| US3707762A (en) | 1970-10-29 | 1973-01-02 | North American Rockwell | Methods of using fluxes in joining metal surfaces |
| US3707782A (en) | 1971-06-23 | 1973-01-02 | Alderson Res Lab | Neck for test dummy |
| JPS5528028B1 (ja) | 1971-07-22 | 1980-07-24 | ||
| US3818756A (en) | 1971-09-07 | 1974-06-25 | E Barron | Load profile analyzer in the attached specification |
| US3740871A (en) | 1972-06-02 | 1973-06-26 | Ford Motor Co | Crash dummy viscous neck |
| US3753301A (en) | 1972-06-23 | 1973-08-21 | Ford Motor Co | Crash dummy viscous neck |
| US3822486A (en) * | 1972-11-21 | 1974-07-09 | Univ Kentucky Res Found | Dynamic childbirth simulator for teaching maternity patient care |
| US3797130A (en) | 1972-11-21 | 1974-03-19 | Univ Kentucky Res Found | Dynamic childbirth simulator for teaching maternity patient care |
| US3824709A (en) | 1972-11-21 | 1974-07-23 | Univ Kentucky Res Found | Dynamic childbirth simulator for teaching maternity patient care |
| US3826019A (en) | 1972-11-21 | 1974-07-30 | Univ Kentucky Res Found | Dynamic childbirth simulator for teaching maternity patient care |
| US3866350A (en) | 1973-02-21 | 1975-02-18 | Said Benkoe By Said Goldfarb | Soft doll construction |
| US3916535A (en) | 1974-01-07 | 1975-11-04 | Brunswick Mfg Co Inc | Neck assembly for mannequin |
| US3905130A (en) | 1974-05-01 | 1975-09-16 | Univ Miami | Ophthalmological manikin with funduscopic eyeground presentation |
| GB1521529A (en) | 1975-09-15 | 1978-08-16 | Hasbro Development Corp | Toy doll |
| US4155196A (en) | 1977-05-12 | 1979-05-22 | General Mills Fun Group, Inc. | Play method and apparatus for producing a heartbeat-like sound |
| US4134218A (en) | 1977-10-11 | 1979-01-16 | Adams Calvin K | Breast cancer detection training system |
| JPS5528028A (en) | 1978-08-18 | 1980-02-28 | Rikagaku Kenkyusho | Live body simulator |
| US4237649A (en) * | 1979-02-02 | 1980-12-09 | Adolph E. Goldfarb | Toy animal figures representing parent animal and offspring |
| FR2448368B1 (fr) | 1979-02-08 | 1985-10-25 | Fromaget Michel | Jouet genetique |
| US4360345A (en) | 1980-07-14 | 1982-11-23 | American Heart Association, Inc. | Health education system |
| US4611998A (en) | 1980-12-08 | 1986-09-16 | Board Of Regents, University Of Texas System | Simulator for teaching neonatal resuscitation |
| US4402327A (en) | 1981-06-12 | 1983-09-06 | Lambert E H | External cardiac compression alarm system |
| US4430893A (en) | 1981-11-16 | 1984-02-14 | Michigan Instruments, Inc. | Pneumatic lung analog for simulation of spontaneous breathing and for testing of ventilatory devices used with spontaneously breathing patients |
| JPS6030769Y2 (ja) | 1981-12-29 | 1985-09-14 | 京都科学標本株式会社 | 胎児触診教習模型 |
| US4395235A (en) | 1982-02-02 | 1983-07-26 | The United States Of America As Represented By The Secretary Of The Navy | Four pivot linkage to simulate head/neck kinematics |
| US4464123A (en) | 1982-07-06 | 1984-08-07 | Critikon, Inc. | Arm simulator for an oscillometric blood pressure monitor |
| JPS59143876U (ja) | 1983-03-18 | 1984-09-26 | 三菱自動車工業株式会社 | 自動車車体 |
| JPS6030769A (ja) | 1983-07-27 | 1985-02-16 | 川崎重工業株式会社 | タンク屋根構築方法 |
| FR2554360A1 (fr) | 1983-11-04 | 1985-05-10 | Delhome Rene | Figurine humaine ou animale perfectionnee |
| JPS60223538A (ja) | 1983-11-16 | 1985-11-08 | Unyusho Kowan Gijutsu Kenkyusho | 浚渫装置 |
| US4575351A (en) | 1984-01-26 | 1986-03-11 | Gonzalez Cindy L | Training doll |
| DE3503577A1 (de) | 1985-02-02 | 1986-08-14 | Daimler-Benz Ag, 7000 Stuttgart | Anatomisches modell, insbesondere dummy zur simulation einer unfallwirkung auf den menschlichen koerper |
| JPH048447Y2 (ja) * | 1985-04-04 | 1992-03-03 | ||
| FR2588984B1 (fr) | 1985-10-17 | 1988-01-15 | Raionnoe Energet Upravle | Simulateur pour apprentissage de procedes de reanimation urgente |
| US4691556A (en) | 1986-01-31 | 1987-09-08 | Ab Volvo | Load-sensing faceform for crash dummy instrumentation |
| JPS6311018A (ja) | 1986-06-30 | 1988-01-18 | 東京電力株式会社 | 再閉路装置 |
| JPS6311018U (ja) | 1986-07-07 | 1988-01-25 | ||
| JPS6360180A (ja) | 1986-08-29 | 1988-03-16 | 小野田エー・エル・シー株式会社 | 軽量コンクリ−トの製造方法 |
| JPS6380180A (ja) | 1986-09-24 | 1988-04-11 | 松下電工株式会社 | ヒ−トポンプの蒸発器部分の構成 |
| US4773866A (en) | 1986-09-26 | 1988-09-27 | Basques Eric O | Rotatable electrical connector |
| JPS6360180U (ja) | 1986-10-07 | 1988-04-21 | ||
| US4734039A (en) | 1986-11-03 | 1988-03-29 | Eric Thompson | Pelvimetry phantom |
| DE3638192A1 (de) | 1986-11-08 | 1988-05-19 | Laerdal Asmund S As | System und verfahren zum testen einer person in der ausuebung der cardiopulmonaren wiederbelebung (cpr) und zur bewertung von uebungen der cpr |
| US4726772A (en) | 1986-12-01 | 1988-02-23 | Kurt Amplatz | Medical simulator |
| US4883442A (en) * | 1987-01-20 | 1989-11-28 | Mtr Enterprises | Pregnant mother doll and separable baby doll |
| US4734074A (en) | 1987-02-09 | 1988-03-29 | Benjamin Kinberg | Animated novelty device |
| US4865552A (en) | 1987-02-13 | 1989-09-12 | William F. Maloney | Ophthalmologic phantom system |
| US4843497A (en) | 1987-02-20 | 1989-06-27 | Leyden Robin D | Lead screw servo system controlled by a control track |
| US4932879A (en) | 1987-03-20 | 1990-06-12 | Michael Ingenito | Compact interactive training manikin system |
| US4915635A (en) | 1987-03-20 | 1990-04-10 | Michael Ingenito | Compact interactive training manikin system |
| US4828501A (en) | 1987-03-20 | 1989-05-09 | Michael Ingenito | Compact interactive training manikin system |
| US4773865A (en) | 1987-06-26 | 1988-09-27 | Baldwin Jere F | Training mannequin |
| AU630859B2 (en) | 1987-08-24 | 1992-11-12 | Zapf Creation Ag | Doll |
| US4836821A (en) | 1987-09-16 | 1989-06-06 | Douglas Raymond | Toy birthing apparatus with chugging-like delivery motion |
| US4867685A (en) | 1987-09-24 | 1989-09-19 | The Trustees Of The College Of Aeronautics | Audio visual instructional system |
| US4820236A (en) | 1987-10-22 | 1989-04-11 | Coleco Industries, Inc. | Doll with sensing switch |
| US4923428A (en) | 1988-05-05 | 1990-05-08 | Cal R & D, Inc. | Interactive talking toy |
| US5100329A (en) | 1990-06-22 | 1992-03-31 | Deesen Kenneth C | Computer assisted coaching method |
| US4907973A (en) | 1988-11-14 | 1990-03-13 | Hon David C | Expert system simulator for modeling realistic internal environments and performance |
| EP0396799B1 (de) | 1989-05-11 | 1995-03-01 | Asmund S. Laerdal A/S | Modell zum Üben der künstlichen Beatmung sowie Nachbildung eines Beatmungstraktes hierfür |
| US4996980A (en) * | 1989-09-27 | 1991-03-05 | Dragerwerk Aktiengesellschaft | Ventilating training apparatus with fault simulation |
| US5137459A (en) | 1989-10-28 | 1992-08-11 | Mathias Zirm | Device for conducting experimental eye operations |
| US5104328A (en) | 1990-04-18 | 1992-04-14 | Lounsbury Katherine L | Anatomical model |
| JPH048447A (ja) | 1990-04-27 | 1992-01-13 | Hitachi Seiki Co Ltd | 工作機械の工具方向転換装置 |
| US5137458A (en) | 1991-01-11 | 1992-08-11 | Physio-Control Corporation | Electrode placement training system |
| US5339799A (en) | 1991-04-23 | 1994-08-23 | Olympus Optical Co., Ltd. | Medical system for reproducing a state of contact of the treatment section in the operation unit |
| JP3217386B2 (ja) | 1991-04-24 | 2001-10-09 | オリンパス光学工業株式会社 | 診断システム |
| US5279309A (en) | 1991-06-13 | 1994-01-18 | International Business Machines Corporation | Signaling device and method for monitoring positions in a surgical operation |
| US5259765A (en) | 1991-06-21 | 1993-11-09 | Simula Inc. | Biofidelic manikin neck |
| FR2687821A1 (fr) * | 1992-02-21 | 1993-08-27 | Refait Denis | Appareil pour simuler des etats physiologiques et physiopathologiques. |
| US5195896A (en) | 1992-02-28 | 1993-03-23 | Simulaids, Inc. | Manikin construction |
| US5207728A (en) * | 1992-03-30 | 1993-05-04 | Fogarty A Edward | Maternity dress for a doll which simulates pregnancy |
| US5584701A (en) | 1992-05-13 | 1996-12-17 | University Of Florida Research Foundation, Incorporated | Self regulating lung for simulated medical procedures |
| US5799282A (en) | 1992-05-19 | 1998-08-25 | Medical Training And Services, International | Methods for establishing certifiable informed consent for a medical procedure |
| US5295835A (en) | 1992-08-12 | 1994-03-22 | The Seaberg Company, Inc. | Training manikin for cardio-pulmonary resuscitation having nested infant-size manikin |
| US5769640A (en) | 1992-12-02 | 1998-06-23 | Cybernet Systems Corporation | Method and system for simulating medical procedures including virtual reality and control method and system for use therein |
| US5385474A (en) | 1992-12-09 | 1995-01-31 | Brindle; Charles | Medical simulator |
| US5509810A (en) | 1993-02-04 | 1996-04-23 | Rofeh Simulations Limited | Interactive neonatal resuscitation training simulator and method |
| US5431171A (en) | 1993-06-25 | 1995-07-11 | The Regents Of The University Of California | Monitoring fetal characteristics by radiotelemetric transmission |
| WO1995011068A1 (en) | 1993-10-18 | 1995-04-27 | Toy Concepts Pty. Ltd. | Doll with simulated physiological functions |
| US5454722A (en) | 1993-11-12 | 1995-10-03 | Project Orbis International, Inc. | Interactive multimedia eye surgery training apparatus and method |
| US5441413A (en) | 1994-05-04 | 1995-08-15 | The Governors Of The University Of Alberta | Teaching aid for spinal mobilization and manipulation therapy |
| US5528943A (en) | 1994-05-20 | 1996-06-25 | First Technology Safety Systems, Inc. | Female crash test dummy having fetal insert |
| US5623582A (en) * | 1994-07-14 | 1997-04-22 | Immersion Human Interface Corporation | Computer interface or control input device for laparoscopic surgical instrument and other elongated mechanical objects |
| US5609485A (en) | 1994-10-03 | 1997-03-11 | Medsim, Ltd. | Medical reproduction system |
| US5628230A (en) | 1994-11-01 | 1997-05-13 | Flam; Eric | Method and apparatus for testing the efficacy of patient support systems |
| AU4147196A (en) | 1994-11-17 | 1996-06-17 | John E. Staneff Jr. | Medical procedure simulator |
| US6850222B1 (en) | 1995-01-18 | 2005-02-01 | Immersion Corporation | Passive force feedback for computer interface devices |
| JP3539645B2 (ja) | 1995-02-16 | 2004-07-07 | 株式会社日立製作所 | 遠隔手術支援装置 |
| US5882206A (en) | 1995-03-29 | 1999-03-16 | Gillio; Robert G. | Virtual surgery system |
| US5620326A (en) | 1995-06-09 | 1997-04-15 | Simulab Corporation | Anatomical simulator for videoendoscopic surgical training |
| US5752880A (en) * | 1995-11-20 | 1998-05-19 | Creator Ltd. | Interactive doll |
| EP0864145A4 (en) | 1995-11-30 | 1998-12-16 | Virtual Technologies Inc | TACTILE FEEDBACK FOR HUMAN / MACHINE INTERFACE |
| US6219032B1 (en) | 1995-12-01 | 2001-04-17 | Immersion Corporation | Method for providing force feedback to a user of an interface device based on interactions of a controlled cursor with graphical elements in a graphical user interface |
| US6443735B1 (en) | 1996-05-08 | 2002-09-03 | Gaumard Scientific, Inc. | Computerized education system for teaching patient care |
| US7192284B2 (en) | 2000-08-17 | 2007-03-20 | Gaumard Scientific Company, Inc. | Interactive education system for teaching patient care |
| US20090148822A1 (en) | 2007-12-07 | 2009-06-11 | Gaumard Scientific Company, Inc. | Interactive Education System for Teaching Patient Care |
| US5853292A (en) | 1996-05-08 | 1998-12-29 | Gaumard Scientific Company, Inc. | Computerized education system for teaching patient care |
| US6527558B1 (en) | 1996-05-08 | 2003-03-04 | Gaumard Scientific, Inc. | Interactive education system for teaching patient care |
| US8696362B2 (en) | 1996-05-08 | 2014-04-15 | Gaumard Scientific Company, Inc. | Interactive education system for teaching patient care |
| US7976312B2 (en) | 1996-05-08 | 2011-07-12 | Gaumard Scientific Company, Inc. | Interactive education system for teaching patient care |
| US6503087B1 (en) * | 1996-05-08 | 2003-01-07 | Gaumard Scientific, Inc. | Interactive education system for teaching patient care |
| US8016598B2 (en) | 1996-05-08 | 2011-09-13 | Gaumard Scientific Company, Inc. | Interactive education system for teaching patient care |
| US7811090B2 (en) | 1996-05-08 | 2010-10-12 | Gaumard Scientific Company, Inc. | Interactive education system for teaching patient care |
| US5800179A (en) | 1996-07-23 | 1998-09-01 | Medical Simulation Corporation | System for training persons to perform minimally invasive surgical procedures |
| US6929481B1 (en) | 1996-09-04 | 2005-08-16 | Immersion Medical, Inc. | Interface device and method for interfacing instruments to medical procedure simulation systems |
| WO1998010387A2 (en) * | 1996-09-04 | 1998-03-12 | Ht Medical Systems, Inc. | Interventional radiology interface apparatus and method |
| US6024576A (en) | 1996-09-06 | 2000-02-15 | Immersion Corporation | Hemispherical, high bandwidth mechanical interface for computer systems |
| US5828197A (en) | 1996-10-25 | 1998-10-27 | Immersion Human Interface Corporation | Mechanical interface having multiple grounded actuators |
| US5900923A (en) | 1996-11-26 | 1999-05-04 | Medsim-Eagle Simulation, Inc. | Patient simulator eye dilation device |
| GB9708644D0 (en) | 1997-04-30 | 1997-06-18 | Simutech Limited | Simulators |
| US6050826A (en) | 1997-06-20 | 2000-04-18 | Nasco International, Inc. | Infant simulation device and method therefore |
| US5941757A (en) | 1997-08-26 | 1999-08-24 | Baby Think It Over, Inc. | Neck assembly for infant simulator |
| US6273728B1 (en) | 1997-09-04 | 2001-08-14 | The University Of Florida | Life support simulation system simulating human physiological parameters |
| US6091981A (en) | 1997-09-16 | 2000-07-18 | Assurance Medical Inc. | Clinical tissue examination |
| US6604980B1 (en) * | 1998-12-04 | 2003-08-12 | Realityworks, Inc. | Infant simulator |
| US6428321B1 (en) * | 1997-12-08 | 2002-08-06 | Btio Educational Products, Inc. | Infant simulator |
| US6220866B1 (en) | 1998-01-15 | 2001-04-24 | Eagle Simulation, Inc. | Electronic auscultation system for patient simulator |
| IL123073A0 (en) * | 1998-01-26 | 1998-09-24 | Simbionix Ltd | Endoscopic tutorial system |
| WO1999039315A2 (en) | 1998-01-28 | 1999-08-05 | Ht Medical Systems, Inc. | Interface device and method for interfacing instruments to vascular access simulation systems |
| US6126450A (en) | 1998-02-04 | 2000-10-03 | Mitsubishi Denki Kabushiki Kaisha | Medical simulator system and medical simulator notifying apparatus |
| US6022263A (en) | 1998-03-20 | 2000-02-08 | Lcd International, L.L.C. | Mechanical toy figures |
| US6048209A (en) * | 1998-05-26 | 2000-04-11 | Bailey; William V. | Doll simulating adaptive infant behavior |
| US6375471B1 (en) | 1998-07-10 | 2002-04-23 | Mitsubishi Electric Research Laboratories, Inc. | Actuator for independent axial and rotational actuation of a catheter or similar elongated object |
| RU2176822C2 (ru) | 1998-07-27 | 2001-12-10 | Лутаенко Вячеслав Федорович | Тренажер для обучения приемам помощи человеку при неотложных состояниях |
| US6088020A (en) | 1998-08-12 | 2000-07-11 | Mitsubishi Electric Information Technology Center America, Inc. (Ita) | Haptic device |
| US6113395A (en) | 1998-08-18 | 2000-09-05 | Hon; David C. | Selectable instruments with homing devices for haptic virtual reality medical simulation |
| US6669483B1 (en) | 1998-09-24 | 2003-12-30 | West Virginia University | Instrumented breast model |
| US6230574B1 (en) | 1998-10-09 | 2001-05-15 | Risk Analysis & Management | Apparatus and method for measuring strangulation effect |
| NO310137B1 (no) * | 1998-12-11 | 2001-05-28 | Laerdal Medical As | System for å måle og analysere HLR parametere for anvendelse med og av en ekstern defibrillator |
| US6117078A (en) | 1998-12-31 | 2000-09-12 | General Electric Company | Virtual volumetric phantom for ultrasound hands-on training system |
| US6872080B2 (en) * | 1999-01-29 | 2005-03-29 | Cardiac Science, Inc. | Programmable AED-CPR training device |
| WO2000051485A2 (en) * | 1999-03-02 | 2000-09-08 | Peter Yong | Thoracic training model for endoscopic cardiac surgery |
| US6077083A (en) | 1999-03-22 | 2000-06-20 | Children's Hospital Of Philadelphia | Doll for instruction of sickle cell disease clinical observations |
| NO310135B1 (no) | 1999-05-31 | 2001-05-28 | Laerdal Medical As | System for å måle og anvende parametere ved utförelse av brystkompresjon i löpet av en livredningssituasjon hhv.treningssituasjon samt anvendelser |
| US6544041B1 (en) | 1999-10-06 | 2003-04-08 | Fonar Corporation | Simulator for surgical procedures |
| GB2364423A (en) | 2000-06-06 | 2002-01-23 | Cybermedix Ltd | Obstetrics Training Aid |
| AUPQ894300A0 (en) | 2000-07-24 | 2000-08-17 | Commonwealth Of Australia, The | A surrogate |
| US6575757B1 (en) | 2000-08-04 | 2003-06-10 | West Virginia University | Computer based instrumentation and sensing for physical examination training |
| US6296490B1 (en) | 2000-08-04 | 2001-10-02 | O-Two Systems International Inc. | Ventilation training analyzer manikin |
| US7976313B2 (en) | 2000-08-17 | 2011-07-12 | Gaumard Scientific Company, Inc. | Interactive education system for teaching patient care |
| JP2004508589A (ja) * | 2000-09-06 | 2004-03-18 | ザ・チェンバーレイン・グループ | 心臓手術用トレーナおよびその作製方法 |
| US6957961B1 (en) | 2000-12-15 | 2005-10-25 | Ram Consulting, Inc. | Manikin having a bio-simulating material and a method of making the same |
| US7241145B2 (en) * | 2001-06-25 | 2007-07-10 | Robert Riener | Birth simulator |
| CA2459748A1 (en) | 2001-09-07 | 2003-03-20 | The General Hospital Corporation | Medical procedure training system |
| IL146413A (en) * | 2001-11-08 | 2010-12-30 | Moshe Katz | Medical training simulator |
| DE20120204U1 (de) | 2001-12-13 | 2003-04-17 | Gustav Klauke GmbH, 42855 Remscheid | Hydraulisches Verpressgerät |
| DE20221662U1 (de) | 2002-01-23 | 2006-11-30 | Riener, Robert, Dr.-Ing. | Interaktiver Geburtensimulator |
| CN1292393C (zh) | 2002-06-25 | 2006-12-27 | 阿普丽佳葛西株式会社 | 婴儿模型 |
| AU2003298562A1 (en) * | 2002-08-23 | 2004-04-23 | University Of South Florida | Robotic mannequin training simulator system |
| WO2005053508A2 (en) | 2002-11-11 | 2005-06-16 | Gaumard Scientific Company, Inc. | Interactive education system for teaching patient care |
| US7021940B2 (en) * | 2002-11-21 | 2006-04-04 | Northern Sydney Area Health Service | Patient simulator manikin and system |
| US6921267B2 (en) | 2002-12-06 | 2005-07-26 | University Of Florida Research Foundation, Inc. | Lung simulator for an integrated human patient simulator |
| US20070166682A1 (en) * | 2003-01-22 | 2007-07-19 | Realsim Systems, Llc. | Medical training apparatus |
| US7997903B2 (en) * | 2003-01-22 | 2011-08-16 | Realsim Systems, Llc | Medical training apparatus |
| US20040152056A1 (en) * | 2003-01-31 | 2004-08-05 | Lamb Cynthia Lee | Method and apparatus for simulating a clinical trial |
| US6997718B1 (en) | 2003-06-18 | 2006-02-14 | Realityworks, Inc. | Infant simulator with floppy neck assembly having a full range of motion |
| NO319063B1 (no) | 2003-10-06 | 2005-06-13 | Laerdal Medical As | Medisinsk pasientsimulator |
| NO321086B1 (no) | 2004-06-09 | 2006-03-13 | Laerdal Medical As | Pustende treningsdukke |
| US7465168B2 (en) * | 2004-09-03 | 2008-12-16 | Birth Injury Prevention, Llc | Birthing simulator |
| US7632100B2 (en) | 2004-09-03 | 2009-12-15 | Birth Injury Prevention, Llc | Brachial plexus simulator |
| US7887330B2 (en) * | 2004-12-02 | 2011-02-15 | The United States Of America As Represented By The Secretary Of The Army | Trauma training system |
| WO2008018889A2 (en) | 2005-09-29 | 2008-02-14 | The General Hospital Corporation | Medical training system for casualty simulation |
| US7316568B2 (en) * | 2005-11-22 | 2008-01-08 | University Of Miami | Cardiopulmonary patient simulator |
| US20080085499A1 (en) * | 2006-10-05 | 2008-04-10 | Christopher Horvath | Surgical console operable to simulate surgical procedures |
| US7485025B2 (en) | 2006-12-08 | 2009-02-03 | Disney Enterprises, Inc. | Expressive eyes with dilating and constricting pupils |
| JP5528028B2 (ja) | 2009-08-20 | 2014-06-25 | キヤノン株式会社 | 画像処理装置およびその方法 |
| US10665131B2 (en) * | 2013-05-17 | 2020-05-26 | Kbport Llc | Suite of coordinating diagnostic medical simulators for live training and evaluation |
-
2006
- 2006-10-03 US US11/538,306 patent/US7811090B2/en not_active Expired - Fee Related
-
2007
- 2007-10-03 JP JP2009531570A patent/JP5367577B2/ja active Active
- 2007-10-03 WO PCT/US2007/080252 patent/WO2008042931A1/en not_active Ceased
- 2007-10-03 EP EP07843710.0A patent/EP2074541B1/en active Active
-
2010
- 2010-08-16 US US12/856,903 patent/US8152532B2/en not_active Expired - Fee Related
-
2012
- 2012-04-06 US US13/441,437 patent/US8678832B2/en not_active Expired - Fee Related
-
2014
- 2014-03-24 US US14/223,687 patent/US9004922B2/en not_active Expired - Fee Related
-
2015
- 2015-04-10 US US14/684,148 patent/US9406244B2/en not_active Expired - Fee Related
-
2016
- 2016-06-27 US US15/193,422 patent/US9870720B2/en active Active
-
2018
- 2018-01-12 US US15/869,708 patent/US10964231B2/en active Active
-
2021
- 2021-03-15 US US17/201,028 patent/US11817007B2/en active Active
Also Published As
| Publication number | Publication date |
|---|---|
| US20120214145A1 (en) | 2012-08-23 |
| US9870720B2 (en) | 2018-01-16 |
| EP2074541A1 (en) | 2009-07-01 |
| US20100304347A1 (en) | 2010-12-02 |
| WO2008042931A1 (en) | 2008-04-10 |
| US20160372009A1 (en) | 2016-12-22 |
| US8152532B2 (en) | 2012-04-10 |
| US7811090B2 (en) | 2010-10-12 |
| US20070122785A1 (en) | 2007-05-31 |
| US10964231B2 (en) | 2021-03-30 |
| US20210201699A1 (en) | 2021-07-01 |
| US20140205983A1 (en) | 2014-07-24 |
| JP2010506217A (ja) | 2010-02-25 |
| US11817007B2 (en) | 2023-11-14 |
| US20180137783A1 (en) | 2018-05-17 |
| US9004922B2 (en) | 2015-04-14 |
| US8678832B2 (en) | 2014-03-25 |
| US20150221237A1 (en) | 2015-08-06 |
| US9406244B2 (en) | 2016-08-02 |
| EP2074541B1 (en) | 2018-12-05 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5367577B2 (ja) | 患者看護教授用インタラクティブ(対話型)教育システム | |
| JP4584906B2 (ja) | 患者看護教授用対話型教育システム | |
| EP2229670B1 (en) | Interactive education system for teaching patient care | |
| US9324247B2 (en) | Interactive education system for teaching patient care | |
| US7976313B2 (en) | Interactive education system for teaching patient care | |
| US8419438B2 (en) | Interactive education system for teaching patient care | |
| US8696362B2 (en) | Interactive education system for teaching patient care | |
| JP5879468B2 (ja) | 患者看護を教示するための双方向教育システム |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20101002 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20101002 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20101009 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20120711 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20121225 |
|
| A601 | Written request for extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A601 Effective date: 20130323 |
|
| A602 | Written permission of extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A602 Effective date: 20130401 |
|
| A601 | Written request for extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A601 Effective date: 20130425 |
|
| A602 | Written permission of extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A602 Effective date: 20130507 |
|
| A601 | Written request for extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A601 Effective date: 20130524 |
|
| A602 | Written permission of extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A602 Effective date: 20130531 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20130625 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20130813 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20130911 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 5367577 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |