JP5296426B2 - 光走査装置及びその制御方法、並びに、画像読取装置及びディスプレイ装置 - Google Patents
光走査装置及びその制御方法、並びに、画像読取装置及びディスプレイ装置 Download PDFInfo
- Publication number
- JP5296426B2 JP5296426B2 JP2008162577A JP2008162577A JP5296426B2 JP 5296426 B2 JP5296426 B2 JP 5296426B2 JP 2008162577 A JP2008162577 A JP 2008162577A JP 2008162577 A JP2008162577 A JP 2008162577A JP 5296426 B2 JP5296426 B2 JP 5296426B2
- Authority
- JP
- Japan
- Prior art keywords
- substrate
- vibration
- vibration sources
- drive circuit
- optical scanning
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images













Landscapes
- Mechanical Optical Scanning Systems (AREA)
- Micromachines (AREA)
- Facsimile Scanning Arrangements (AREA)
- Laser Beam Printer (AREA)
Description
入射したビーム光を反射するミラー部と、
該ミラー部を支持する一対の梁が形成された基板と、
該基板を両端部を固定する固定部材と
前記基板上に設けられ、前記基板の変形を伴う板波を発生させる複数の振動源と、
前記複数の振動源を駆動する駆動回路と、
前記駆動回路を制御し、前記複数の振動源によって板波を発生させ、前記複数の振動源による合成板波の節の位置を、前記梁から予め設定された許容距離内に位置させるように制御する制御手段とを備え、
前記制御手段は、前記駆動回路による前記複数の振動源の少なくとも一方に印加する駆動信号の位相を補正させることを特徴とする。
入射したビーム光を反射するミラー部と、
該ミラー部を支持する一対の梁が形成された基板と、
該基板の両端部を固定する固定部材と、
前記基板上に設けられ、前記基板の変形を伴う板波を発生させる複数の振動源と、
前記複数の振動源を駆動する駆動回路と、
前記駆動回路を制御し、前記複数の振動源によって板波を発生させ、前記複数の振動源による合成板波の節の位置を、前記梁から予め設定された許容距離内に位置させるように制御する制御手段と、
前記ミラー部で反射したビーム光のスキャン対象物の近傍に設けられたビーム光検出手段と、
前記ビーム光検出手段で検出したビーム光強度が、予め設定された閾値以上であるか否かを判定する判定手段とを備え、
前記判定手段が前記ビーム光強度が予め設定された閾値未満であると判定される場合に、前記制御手段は前記駆動回路を制御して、前記振動源による合成板波の前記節の位置を修正することを特徴とする。
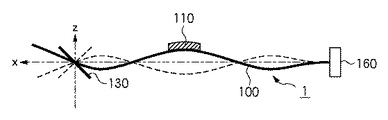
図3(a)に第1の実施形態における光走査装置1の上面図、同図(b)に側面図を示す。
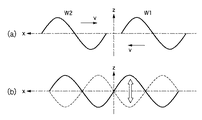
図3の実施形態では、最良の形態として2つの振動源110、及び、111を用いたが、振動源は110、または、111のいずれか一方であっても、ミラー130の回転軸の変動を小さくする効果が得られる。この場合、板波の節の位置を調整することはできないが、固定部材160と161により両端を支持されていることにより、基板100の厚み方向に振動し難くなる。図1の片持ちの構成では、ミラーの回転軸と板波の節の位置が一致している場合でも、衝撃等により板波以外の振動が加わるとミラー軸が変動してしまうが、本実施形態の両端を支持する構成では、振動源の数に依らずに、この変動を抑制できる。
図11に本発明の光走査装置を装着したレーザビームプリンタ3に実装した場合のブロック構成図を示す。
以下、各構成要素の動作を、図13に示すフローチャートに従って説明する。
・nが奇数の場合:
P=Δt+Δt×(n \ 2)
・nが偶数の場合:
P=−Δt×(n \ 2)
(ここで、「x \ y」は整数xを整数yで除算した際の商を返す関数である)
上記のようにして、位相差を徐々に変えていき、BD1/BD0≧Thという関係になったとする。これは、少なくとも感光ドラム800上のスキャン中は「蹴られ」が発生しないことになるので、処理はステップS7に進み、プリント待機状態に遷移する。
次に、第2の実施形態を説明する。図13(a)、(b)は本第2の実施形態における光り走査装置1の上面図及び側面図である。図3と実質的に同機能を果たす構成には同参照符号を付し、その詳細については省略する。
F0+Δf、F0−Δf、F0+2Δf、F0−2Δf、F0+3Δf...
なお、最初の4回程度で、周波数の増加させるべきか、減少させるべきかを判明するので、それ以降は判明した方向についてのみ変化させても良い。
Claims (10)
- 入射したビーム光を反射するミラー部と、
該ミラー部を支持する一対の梁が形成された基板と、
該基板を両端部を固定する固定部材と、
前記基板上に設けられ、前記基板の変形を伴う板波を発生させる複数の振動源と、
前記複数の振動源を駆動する駆動回路と、
前記駆動回路を制御し、前記複数の振動源によって板波を発生させ、前記複数の振動源による合成板波の節の位置を、前記梁から予め設定された許容距離内に位置させるように制御する制御手段とを備え、
前記制御手段は、前記駆動回路による前記複数の振動源の少なくとも一方に印加する駆動信号の位相を補正させることを特徴とする光走査装置。 - 前記ミラー部で反射したビーム光のスキャン対象物の近傍に設けられたビーム光検出手段と、
前記ビーム光検出手段で検出したビーム光強度が、予め設定された閾値以上であるか否かを判定する判定手段とを備え、
前記判定手段が前記ビーム光強度が予め設定された閾値未満であると判定される場合に、前記制御手段は前記駆動回路を制御して、前記振動源による合成板波の前記節の位置を修正することを特徴とする請求項1に記載の光走査装置。 - 入射したビーム光を反射するミラー部と、
該ミラー部を支持する一対の梁が形成された基板と、
該基板の両端部を固定する固定部材と、
前記基板上に設けられ、前記基板の変形を伴う板波を発生させる複数の振動源と、
前記複数の振動源を駆動する駆動回路と、
前記駆動回路を制御し、前記複数の振動源によって板波を発生させ、前記複数の振動源による合成板波の節の位置を、前記梁から予め設定された許容距離内に位置させるように制御する制御手段と、
前記ミラー部で反射したビーム光のスキャン対象物の近傍に設けられたビーム光検出手段と、
前記ビーム光検出手段で検出したビーム光強度が、予め設定された閾値以上であるか否かを判定する判定手段とを備え、
前記判定手段が前記ビーム光強度が予め設定された閾値未満であると判定される場合に、前記制御手段は前記駆動回路を制御して、前記振動源による合成板波の前記節の位置を修正することを特徴とする光走査装置。 - 前記スキャン対象物はレーザビームプリンタが有する感光ドラムであることを特徴とする請求項2又は3に記載の光走査装置。
- 入射したビーム光を反射するミラー部と、
該ミラー部を支持する一対の梁が形成された基板と、
該基板の両端部を固定する固定部材と、
前記基板上に設けられ、前記基板の変形を伴う板波を発生させる複数の振動源と、
前記複数の振動源を駆動する駆動回路と、
前記駆動回路を制御し、前記複数の振動源によって板波を発生させ、前記複数の振動源による合成板波の節の位置を、前記梁から予め設定された許容距離内に位置させるように制御する制御手段とを備え、
前記制御手段は前記駆動回路を制御し、前記振動源の振動周波数を微修正するとで、前記振動源からの板波の節の位置を、前記梁の位置から予め設定された許容距離内に位置させる制御することを特徴とする光走査装置。 - 前記ミラー部で反射したビーム光のスキャン対象物の近傍に設けられたビーム光検出手段と、
前記ビーム光検出手段で検出したビーム光強度が、予め設定された閾値以上であるか否かを判定する判定手段とを備え、
前記判定手段が前記ビーム光強度が予め設定された閾値未満であると判定される場合に、前記制御手段は前記駆動回路を制御して、前記振動源による印加する駆動信号の周波数を修正することを特徴とする請求項5に記載の光走査装置。 - 入射したビーム光を反射するミラー部と、
該ミラー部を支持する一対の梁が形成された基板と、
該基板を両端部を固定する固定部材と、
前記基板上に設けられ、前記基板の変形を伴う板波を発生させる複数の振動源と、
前記振動源を駆動する駆動回路とを有する光走査装置を制御するに際し、
前記駆動回路を制御し、前記複数の振動源によって板波を発生させ、前記複数の振動源による合成板波の節の位置を、前記梁から予め設定された許容距離内に位置させるように制御するにあたり、前記複数の振動源の少なくとも一方に印加する駆動信号の位相を補正させることを特徴とする光走査装置の制御方法。 - 入射したビーム光を反射するミラー部と、
該ミラー部を支持する一対の梁が形成された基板と、
該基板の両端部を固定する固定部材と、
前記基板上に設けられ、前記基板の変形を伴う板波を発生させる複数の振動源と、
前記振動源を駆動する駆動回路とを有する光走査装置を制御するに際し、
前記駆動回路を制御し、前記複数の振動源によって板波を発生させ、前記複数の振動源による合成板波の節の位置を、前記梁から予め設定された許容距離内に位置させるように制御するにあたり、前記振動源の振動周波数を微修正するとで、前記振動源からの板波の節の位置を、前記梁の位置から予め設定された許容距離内に位置させることを特徴とするの光走査装置の制御方法。 - 請求項1乃至6のいずれか1項に記載の光走査装置を備えたことを特徴とする画像読取装置。
- 請求項1乃至6のいずれか1項に記載の光走査装置を備えたことを特徴とするディスプレイ装置。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2008162577A JP5296426B2 (ja) | 2008-06-20 | 2008-06-20 | 光走査装置及びその制御方法、並びに、画像読取装置及びディスプレイ装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2008162577A JP5296426B2 (ja) | 2008-06-20 | 2008-06-20 | 光走査装置及びその制御方法、並びに、画像読取装置及びディスプレイ装置 |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2010002779A JP2010002779A (ja) | 2010-01-07 |
| JP2010002779A5 JP2010002779A5 (ja) | 2011-07-28 |
| JP5296426B2 true JP5296426B2 (ja) | 2013-09-25 |
Family
ID=41584548
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2008162577A Active JP5296426B2 (ja) | 2008-06-20 | 2008-06-20 | 光走査装置及びその制御方法、並びに、画像読取装置及びディスプレイ装置 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP5296426B2 (ja) |
Families Citing this family (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP5494388B2 (ja) * | 2010-09-24 | 2014-05-14 | ブラザー工業株式会社 | 2次元光走査装置、画像投影装置 |
Family Cites Families (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH10253912A (ja) * | 1997-01-13 | 1998-09-25 | Denso Corp | 光走査装置 |
| JP4710391B2 (ja) * | 2005-04-14 | 2011-06-29 | コニカミノルタホールディングス株式会社 | 光偏向器 |
| JP2007196606A (ja) * | 2006-01-30 | 2007-08-09 | Seiko Epson Corp | 画像形成装置 |
| WO2008041585A1 (fr) * | 2006-09-27 | 2008-04-10 | National Institute Of Advanced Industrial Science And Technology | Dispositif de balayage optique |
| JP5157499B2 (ja) * | 2008-02-05 | 2013-03-06 | ブラザー工業株式会社 | 光スキャナ |
| JP2009294458A (ja) * | 2008-06-05 | 2009-12-17 | Brother Ind Ltd | 光スキャナ |
-
2008
- 2008-06-20 JP JP2008162577A patent/JP5296426B2/ja active Active
Also Published As
| Publication number | Publication date |
|---|---|
| JP2010002779A (ja) | 2010-01-07 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5296427B2 (ja) | 光走査装置及びその制御方法、並びに、画像読取装置及びディスプレイ装置 | |
| JP2008116678A (ja) | 表示装置及び表示方法 | |
| JP5400925B2 (ja) | 揺動体装置、光偏向器、及びそれを用いた光学機器 | |
| JP2011095331A (ja) | 光走査装置、画像形成装置及び画像投影装置 | |
| JP5404102B2 (ja) | 揺動体装置、及びそれを用いる光偏向装置 | |
| JP5065116B2 (ja) | 揺動体装置、光偏向装置、及びその制御方法 | |
| JP2009192640A (ja) | 揺動体装置及び光偏向装置 | |
| JP2009134243A (ja) | 揺動体装置の製造方法、該製造方法により製造された揺動体装置によって構成される光偏向器及び光学機器 | |
| JP5296426B2 (ja) | 光走査装置及びその制御方法、並びに、画像読取装置及びディスプレイ装置 | |
| JP5188315B2 (ja) | 揺動体装置、光偏向装置、及びそれを用いた光学機器 | |
| JP5296425B2 (ja) | 光走査装置及びそれを用いた印刷装置及びその制御方法、並びに光走査装置を備えたディスプレイ装置、画像読み取り装置、バーコードリーダ | |
| JP2009031642A (ja) | 揺動体装置、光偏向器およびそれを用いた画像形成装置 | |
| JP5339752B2 (ja) | 揺動体装置及びその製造方法、光偏向器、画像形成装置 | |
| JP6369068B2 (ja) | アクチュエータ、光偏向器、光走査装置、画像形成装置及び画像投影装置 | |
| JP2009031643A (ja) | 揺動体装置、光偏向器およびそれを用いた画像形成装置 | |
| JP5716992B2 (ja) | 光偏向装置、光走査装置、画像形成装置及び画像投影装置 | |
| JP5341372B2 (ja) | 揺動体装置、揺動体装置を用いた画像形成装置 | |
| JP5296428B2 (ja) | 光走査装置及び該光走査装置を用いた画像形成装置、及び画像読み取り装置とディスプレイ | |
| JP2014048571A (ja) | 光偏向器、画像形成装置及び画像投影装置 | |
| JP5084385B2 (ja) | ねじりバネ、光偏向器及びそれを用いた画像形成装置 | |
| JP5058661B2 (ja) | 画像形成装置 | |
| JP5408887B2 (ja) | 揺動体装置、揺動体装置を用いた画像形成装置 | |
| JP2009042579A (ja) | 光偏向装置、及び揺動体のジッタ抑制方法 | |
| JP2009003459A (ja) | 光走査装置および画像形成装置 | |
| JP6350496B2 (ja) | 画像形成装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20110609 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20110609 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20120622 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20120629 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20120828 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20130107 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20130304 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20130531 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20130613 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 5296426 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |