JP5293174B2 - 機器管理システム及び機器管理プログラム - Google Patents
機器管理システム及び機器管理プログラム Download PDFInfo
- Publication number
- JP5293174B2 JP5293174B2 JP2008332772A JP2008332772A JP5293174B2 JP 5293174 B2 JP5293174 B2 JP 5293174B2 JP 2008332772 A JP2008332772 A JP 2008332772A JP 2008332772 A JP2008332772 A JP 2008332772A JP 5293174 B2 JP5293174 B2 JP 5293174B2
- Authority
- JP
- Japan
- Prior art keywords
- unit
- analysis
- communication protocol
- device management
- signal
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
Images


Classifications
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y02—TECHNOLOGIES OR APPLICATIONS FOR MITIGATION OR ADAPTATION AGAINST CLIMATE CHANGE
- Y02D—CLIMATE CHANGE MITIGATION TECHNOLOGIES IN INFORMATION AND COMMUNICATION TECHNOLOGIES [ICT], I.E. INFORMATION AND COMMUNICATION TECHNOLOGIES AIMING AT THE REDUCTION OF THEIR OWN ENERGY USE
- Y02D10/00—Energy efficient computing, e.g. low power processors, power management or thermal management
Landscapes
- Computer And Data Communications (AREA)
Description
(1)複数種類のバスが混在する場合には、そのバスの種類の分だけモデムを用意する必要があり、管理や操作に支障をきたすことがある。
(2)バスの仕様が変更された場合又はモデムの機能改善が行われた場合には、モデムの交換又はモデム内に存在するファームウェアの更新等のメンテナンスを行う必要があり、ユーザに繁雑な作業が強いられる。
(3)新しい種類のバスが追加された場合には、そのバスに対応可能なモデムを購入する必要がある。
この発明によると、シリアルバスを介した機器からの信号が接続装置に入力されると、その信号の周波数の2倍以上のサンプリング周波数でサンプリングされた後に機器管理装置に送信され、機器管理装置で行われる解析によって機器で使用されている通信プロトコルが特定され、この特定された通信プロトコルを用いて接続装置を介した管理手段と機器との間の通信により機器の管理が行われる。
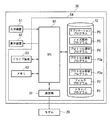
また、本発明の機器管理システムは、前記解析手段が、前記通信プロトコルの種類毎に設けられて、前記接続装置から出力される信号に対して前記通信プロトコルの種類に応じた復調処理を行う複数の復調手段(46a〜46c)と、前記複数の復調手段に対応してそれぞれ設けられ、対応する復調手段で得られた復調信号に対して前記通信プロトコルの種類に応じた解析処理を行う複数の解析処理手段(47a〜47c)と、前記解析処理手段の処理結果に基づいて前記通信プロトコルを選択する選択手段(35)とを備えることを特徴としている。
また、本発明の機器管理システムは、前記機器管理装置が、前記接続装置から出力される信号に対して直流成分の揺らぎを除去するフィルタ手段(33)を備えることを特徴としている。
また、本発明の機器管理システムは、前記機器管理装置が、前記接続装置から出力される信号に含まれる雑音を分析する雑音分析手段(48)と、前記雑音分析手段の分析結果を保存する保存装置(62)とを備えることを特徴としている。
本発明の機器管理プログラムは、コンピュータを、シリアルバスに接続された管理対象の機器から出力されて前記シリアルバスを介して通信される信号の周波数の2倍以上のサンプリング周波数でサンプリングされた信号を解析して前記機器で使用されている通信プロトコルを特定する解析手段(34a〜34d、35)と、前記解析手段で特定された通信プロトコルを用いて前記機器との間で通信を行って前記機器の管理を行う管理手段(36)として機能させることを特徴としている。
また、本発明の機器管理プログラムは、前記解析手段が、前記通信プロトコルの種類毎に設けられて、前記サンプリングされた信号に対して前記通信プロトコルの種類に応じた復調処理を行う複数の復調手段(46a〜46c)と、前記複数の復調手段に対応してそれぞれ設けられ、対応する復調手段で得られた復調信号に対して前記通信プロトコルの種類に応じた解析処理を行う複数の解析処理手段(47a〜47c)と、前記解析処理手段の処理結果に基づいて前記通信プロトコルを選択する選択手段(35)とを含むことを特徴としている。
(1)複数種類のバスが混在する場合であっても、そのバスの種類の分だけモデムを用意する必要がなく、1つのモデムで対応することができるため、ユーザの投資、及び管理や操作に要する負担を軽減することができる。
(2)バスの仕様が変更された場合には、機器管理装置30のプログラム(プロトコル解析プログラム)の変更で対応することができ、従来のようにモデムの交換又はモデム内に存在するファームウェアの更新等のメンテナンス作業を行う必要がないため、ユーザに強いられていた繁雑な作業の負担を軽減することができる。
(3)新しい種類のバスが追加された場合であっても、そのバスに対応可能なモデムを購入する必要はなく、機器管理装置30のプログラム(プロトコル解析プログラム)の追加で対応することができる。
(5)従来に比べてモデム20の構成を単純化できるため、防爆仕様に対応し易くなるとともに、バッテリの超寿命化、寸法の低減(小型化)、低コスト化を実現することができる。
(6)信号線のノイズ等の全履歴を機器管理装置30で保存することができるため、プラントで何らかの障害が生じた場合の診断を容易に行うことができる。
10 機器
20 モデム
23 A/Dコンバータ
25 D/Aコンバータ
30 機器管理装置
33 フィルタ部
34a〜34d プロトコル解析部
35 プロトコル選択部
36 管理部
46a〜46c 復号化部
47a〜47c 解析処理部
48 ノイズ解析部
62 データ格納部
Claims (6)
- シリアルバスに接続された管理対象の機器と、該機器の管理を行う機器管理装置と、前記シリアルバスを介して前記機器と前記機器管理装置とを接続する接続装置とを備える機器管理システムにおいて、
前記接続装置は、前記シリアルバスを介して入力される前記機器からの信号を該信号の周波数の2倍以上のサンプリング周波数でサンプリングして前記機器管理装置に出力する第1変換部と、前記機器管理装置から出力される信号をアナログ信号に変換して前記シリアルバスを介して前記機器に出力する第2変換部とを備えており、
前記機器管理装置は、前記接続装置から出力される信号を解析して前記機器で使用されている通信プロトコルを特定する解析手段と、該解析手段で特定された通信プロトコルを用いて前記接続装置を介して前記機器との間で通信を行って前記機器の管理を行う管理手段とを備える
ことを特徴とする機器管理システム。 - 前記解析手段は、前記通信プロトコルの種類毎に設けられて、前記接続装置から出力される信号に対して前記通信プロトコルの種類に応じた復調処理を行う複数の復調手段と、
前記複数の復調手段に対応してそれぞれ設けられ、対応する復調手段で得られた復調信号に対して前記通信プロトコルの種類に応じた解析処理を行う複数の解析処理手段と、
前記解析処理手段の処理結果に基づいて前記通信プロトコルを選択する選択手段と
を備えることを特徴とする請求項1記載の機器管理システム。 - 前記機器管理装置は、前記接続装置から出力される信号に対して直流成分の揺らぎを除去するフィルタ手段を備えることを特徴とする請求項1又は請求項2記載の機器管理システム。
- 前記機器管理装置は、前記接続装置から出力される信号に含まれる雑音を分析する雑音分析手段と、
前記雑音分析手段の分析結果を保存する保存装置と
を備えることを特徴とする請求項1から請求項3の何れか一項に記載の機器管理システム。 - コンピュータを、
シリアルバスに接続された管理対象の機器から出力されて前記シリアルバスを介して通信される信号の周波数の2倍以上のサンプリング周波数でサンプリングされた信号を解析して前記機器で使用されている通信プロトコルを特定する解析手段と、
前記解析手段で特定された通信プロトコルを用いて前記機器との間で通信を行って前記機器の管理を行う管理手段と
して機能させることを特徴とする機器管理プログラム。 - 前記解析手段は、前記通信プロトコルの種類毎に設けられて、前記サンプリングされた信号に対して前記通信プロトコルの種類に応じた復調処理を行う複数の復調手段と、
前記複数の復調手段に対応してそれぞれ設けられ、対応する復調手段で得られた復調信号に対して前記通信プロトコルの種類に応じた解析処理を行う複数の解析処理手段と、
前記解析処理手段の処理結果に基づいて前記通信プロトコルを選択する選択手段と
を含むことを特徴とする請求項5記載の機器管理プログラム。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2008332772A JP5293174B2 (ja) | 2008-12-26 | 2008-12-26 | 機器管理システム及び機器管理プログラム |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2008332772A JP5293174B2 (ja) | 2008-12-26 | 2008-12-26 | 機器管理システム及び機器管理プログラム |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2010152826A JP2010152826A (ja) | 2010-07-08 |
| JP5293174B2 true JP5293174B2 (ja) | 2013-09-18 |
Family
ID=42571805
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2008332772A Expired - Fee Related JP5293174B2 (ja) | 2008-12-26 | 2008-12-26 | 機器管理システム及び機器管理プログラム |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP5293174B2 (ja) |
Families Citing this family (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN103391284B (zh) * | 2012-05-07 | 2019-01-01 | 布里斯托尔D/B/A远程自动化解决方案公司 | 识别过程控制系统中正在使用的通信协议的方法和装置 |
| CN112383619B (zh) * | 2020-11-13 | 2024-05-17 | 广联达科技股份有限公司 | 一种数据传输方法、系统及电子设备 |
Family Cites Families (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2003069731A (ja) * | 2001-08-29 | 2003-03-07 | Mitsubishi Electric Corp | 機器状態遠隔監視システム |
| JP2004120668A (ja) * | 2002-09-30 | 2004-04-15 | Yokogawa Electric Corp | 複数の通信プロトコルに対応した信号伝送器 |
| CN100507781C (zh) * | 2004-03-02 | 2009-07-01 | 罗斯蒙德公司 | 具有可编程数字/模拟接口的现场安装过程设备 |
| JP2008271370A (ja) * | 2007-04-24 | 2008-11-06 | Matsushita Electric Ind Co Ltd | A/d変換システム |
-
2008
- 2008-12-26 JP JP2008332772A patent/JP5293174B2/ja not_active Expired - Fee Related
Also Published As
| Publication number | Publication date |
|---|---|
| JP2010152826A (ja) | 2010-07-08 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US8910143B2 (en) | Conversion system and method for use in upgrading a monitoring system | |
| US8868971B2 (en) | Wireless diagnostic system | |
| CN106201757B (zh) | 一种异常处理方法和装置 | |
| JP5104673B2 (ja) | 機器管理装置及びプログラム | |
| CN101291509A (zh) | 移动终端装置、移动终端装置的诊断方法 | |
| JPH10228311A (ja) | 機器故障の遠隔診断システム | |
| US7689373B1 (en) | USB vibration data acquisition | |
| JP5293174B2 (ja) | 機器管理システム及び機器管理プログラム | |
| JP2016114341A (ja) | データ収集装置、データ収集システム、制御方法及びプログラム | |
| CN111108453B (zh) | 控制系统、控制方法和控制程序 | |
| JP5178774B2 (ja) | 空調通信情報収集装置、空調通信情報収集システム、空調通信情報収集方法及びプログラム | |
| CN115098554A (zh) | 车辆自动驾驶数据处理方法、装置、电子设备和存储介质 | |
| US20070168729A1 (en) | System and method for testing and debugging electronic apparatus in single connection port | |
| CN112214463B (zh) | Gps终端的监测方法、装置、系统及存储介质 | |
| CN111239523B (zh) | 一种变频器测试系统、方法、装置和存储介质 | |
| JP2004240513A (ja) | 生産設備状態解析装置 | |
| EP1926206A1 (en) | Frequency converter | |
| CN113484710A (zh) | 用于流量捕捉和调试工具的图形用户界面 | |
| CN116736750B (zh) | 随钻测控仪器涡轮发电机转子转速信号模拟系统 | |
| JP2005275713A (ja) | 保守情報管理システム | |
| CN213928709U (zh) | 基于云端的泵设备的故障监控系统及泵设备 | |
| EP3448054A1 (en) | Remote monitoring system, central data collection device, field data collection device, remote monitoring method, and program | |
| CN120405254A (zh) | 基于多种变频器智能综合维修测试系统及方法 | |
| CN209946283U (zh) | 继电保护试验仪 | |
| CN118555596A (zh) | 一种基于无线电用的信息号分析仪系统 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20110825 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20121205 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20130115 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20130215 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20130514 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20130527 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 5293174 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| LAPS | Cancellation because of no payment of annual fees |