JP5283809B2 - X線イメージング・デバイス内のx線管の位置決め誤差を減少させるためのシステム及び方法 - Google Patents
X線イメージング・デバイス内のx線管の位置決め誤差を減少させるためのシステム及び方法 Download PDFInfo
- Publication number
- JP5283809B2 JP5283809B2 JP2001148554A JP2001148554A JP5283809B2 JP 5283809 B2 JP5283809 B2 JP 5283809B2 JP 2001148554 A JP2001148554 A JP 2001148554A JP 2001148554 A JP2001148554 A JP 2001148554A JP 5283809 B2 JP5283809 B2 JP 5283809B2
- Authority
- JP
- Japan
- Prior art keywords
- ray
- ray tube
- assembly
- imaging device
- sensor unit
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Lifetime
Links
- 238000003384 imaging method Methods 0.000 title claims description 27
- 238000000034 method Methods 0.000 title claims description 8
- 238000012937 correction Methods 0.000 claims description 24
- 230000003213 activating effect Effects 0.000 claims 2
- 238000010586 diagram Methods 0.000 description 6
- 210000003484 anatomy Anatomy 0.000 description 5
- 238000013459 approach Methods 0.000 description 3
- 230000008859 change Effects 0.000 description 3
- 238000006073 displacement reaction Methods 0.000 description 3
- 230000008569 process Effects 0.000 description 3
- 230000002411 adverse Effects 0.000 description 2
- 230000000694 effects Effects 0.000 description 2
- 238000005259 measurement Methods 0.000 description 2
- 238000012986 modification Methods 0.000 description 2
- 230000004048 modification Effects 0.000 description 2
- 230000004913 activation Effects 0.000 description 1
- 230000002238 attenuated effect Effects 0.000 description 1
- 230000015556 catabolic process Effects 0.000 description 1
- 238000006731 degradation reaction Methods 0.000 description 1
- 238000001514 detection method Methods 0.000 description 1
- 238000002059 diagnostic imaging Methods 0.000 description 1
- 238000012544 monitoring process Methods 0.000 description 1
- 238000006467 substitution reaction Methods 0.000 description 1
- 238000012360 testing method Methods 0.000 description 1
- 238000012546 transfer Methods 0.000 description 1
Images








Classifications
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B6/00—Apparatus or devices for radiation diagnosis; Apparatus or devices for radiation diagnosis combined with radiation therapy equipment
- A61B6/44—Constructional features of apparatus for radiation diagnosis
- A61B6/4476—Constructional features of apparatus for radiation diagnosis related to motor-assisted motion of the source unit
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B6/00—Apparatus or devices for radiation diagnosis; Apparatus or devices for radiation diagnosis combined with radiation therapy equipment
- A61B6/10—Safety means specially adapted therefor
- A61B6/102—Protection against mechanical damage, e.g. anti-collision devices
- A61B6/105—Braking or locking devices
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B6/00—Apparatus or devices for radiation diagnosis; Apparatus or devices for radiation diagnosis combined with radiation therapy equipment
- A61B6/44—Constructional features of apparatus for radiation diagnosis
- A61B6/4429—Constructional features of apparatus for radiation diagnosis related to the mounting of source units and detector units
- A61B6/4464—Constructional features of apparatus for radiation diagnosis related to the mounting of source units and detector units the source unit or the detector unit being mounted to ceiling
Landscapes
- Health & Medical Sciences (AREA)
- Life Sciences & Earth Sciences (AREA)
- Medical Informatics (AREA)
- Engineering & Computer Science (AREA)
- Radiology & Medical Imaging (AREA)
- Molecular Biology (AREA)
- Biophysics (AREA)
- Nuclear Medicine, Radiotherapy & Molecular Imaging (AREA)
- Optics & Photonics (AREA)
- Pathology (AREA)
- Physics & Mathematics (AREA)
- Biomedical Technology (AREA)
- Heart & Thoracic Surgery (AREA)
- High Energy & Nuclear Physics (AREA)
- Surgery (AREA)
- Animal Behavior & Ethology (AREA)
- General Health & Medical Sciences (AREA)
- Public Health (AREA)
- Veterinary Medicine (AREA)
- Apparatus For Radiation Diagnosis (AREA)
- X-Ray Techniques (AREA)
Description
ΔX=B0+B1V
のように表現することができる。
上式において、多項式の次数は、較正処理に組み込まれた離散的速度の数によって異なる。
110 X線管
120 コリメータ
130 寝台検出器
140 X線寝台
150 患者
160 臨床操作者
200 移動止め位置決めシステム
205 X線アセンブリ
210 X線管
220 コリメータ
230 一対の垂直レール
240 一対の水平レール
250 移動止め
275 センサ・ユニット
300 ロック・システム
310 電磁式ロック
320 ブリッジ・レール
330 電源
410 電磁式ロック・コイル
420 ロック・ストリップ
430 軸受け
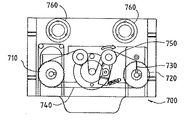
700 自己引張式ベルト・アセンブリ
710 エンコーダ・スプロケット
720 ポテンショメータ・スプロケット
730 位置合せマーク
740 位置センサ・ベルト
750 引張り器アーム
760 駆動ベルト・アセンブリ
800 センサ・ユニット
810 エンコーダ・スプロケット
820 ポテンショメータ・スプロケット
830 位置合せマーク
840 位置センサ・ベルト
850 ベルト引張り器ねじ
860 駆動ベルト・アセンブリ
870 ベルト変位スプロケット
910 駆動ベルト・アセンブリ
920 マイクロプロセッサ・インタフェース
930 確保用ポイント
Claims (7)
- X線イメージング・デバイス内のX線管の位置決め誤差を減少させるためのシステムであって、
前記X線イメージング・デバイス内で移動可能なX線管と、
X線イメージング・デバイス内での前記X線管の位置を示す位置信号を発生させるセンサ・ユニットと、
前記位置信号を受け取り、前記位置信号と前記X線イメージング・デバイス内の所定のX線管位置に基づいて前記X線管の移動を較正するために前記X線デバイス内で適用される前記X線管に対するオーバーシュート補正を決定するマイクロプロセッサと、を含むシステム。
- 前記X線管とコリメータ(220)を備えるX線アセンブリ(205)と、
一対の垂直レール(230)と、
一対の水平レール(240)と、
電磁式ロック(310)とブリッジ・レール(320)と電源(330)とを含むロック・システム(300)と、を含み、
前記垂直レール(230)と前記水平レール(240)に沿った2つの次元方向に前記X線アセンブリ(205)が移動し、
前記マイクロプロセッサが前記ロック・システムを起動させることにより前記X線管の移動を抑制している、請求項1に記載のシステム。
- 前記センサ・ユニットが位置システム以外に速度信号を発生させており、かつ前記速度信号が前記マイクロプロセッサにより受け取られる、請求項1または2に記載のシステム。
- 前記センサ・ユニットが前記位置信号を発生させるためにポテンショメータ又はディジタル・エンコーダを使用しており、
前記オーバーシュート補正が、少なくともX線管の初期位置と最終位置の解析により決定されている、請求項1乃至3のいずれかに記載のシステム。
- X線イメージング・デバイス内でのX線管の位置決め誤差を減少させる方法であって、
前記X線イメージング・デバイス内のX線管の位置信号を生成するステップと、
前記位置信号と前記X線イメージング・デバイス内の所定のX線管位置に基づいて前記X線管に対するオーバーシュート補正を決定するステップと、
前記X線管の移動を較正して前記X線管の位置決め誤差を減少させるために、前記オーバーシュート補正を適用するステップと、を含む方法。
- 前記オーバーシュート補正が前記X線管の位置に関する位置信号又は前記X線管の速度に関する速度データを使用することにより決定されている、請求項5に記載の方法。
- 前記オーバーシュート補正を決定するステップが、
所定の初期速度でX線管を移動させるステップと、前記X線管の移動の停止を開始させるために、初期位置においてロック・システムを起動させるステップと、X線管を静止させる最終位置を決定するステップと、初期位置と最終位置の差に基づいてオーバーシュート補正を決定するステップと、を含む請求項5に記載の方法。
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| US09/575,035 US6379042B1 (en) | 2000-05-19 | 2000-05-19 | Variable self-compensating detent control system for improved positioning accuracy and repeatability |
| US09/575035 | 2000-05-19 |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2002034959A JP2002034959A (ja) | 2002-02-05 |
| JP2002034959A5 JP2002034959A5 (ja) | 2008-07-03 |
| JP5283809B2 true JP5283809B2 (ja) | 2013-09-04 |
Family
ID=24298666
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2001148554A Expired - Lifetime JP5283809B2 (ja) | 2000-05-19 | 2001-05-18 | X線イメージング・デバイス内のx線管の位置決め誤差を減少させるためのシステム及び方法 |
Country Status (4)
| Country | Link |
|---|---|
| US (1) | US6379042B1 (ja) |
| EP (1) | EP1157661B1 (ja) |
| JP (1) | JP5283809B2 (ja) |
| DE (1) | DE60132516T2 (ja) |
Families Citing this family (9)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US6459226B1 (en) * | 2001-01-04 | 2002-10-01 | Ge Medical Systems Global Technology Company, Llc | Method and apparatus for accurate powered deceleration and immobilization of manually operated mechanism |
| US6990368B2 (en) * | 2002-04-04 | 2006-01-24 | Surgical Navigation Technologies, Inc. | Method and apparatus for virtual digital subtraction angiography |
| JP4974726B2 (ja) * | 2007-03-23 | 2012-07-11 | 富士フイルム株式会社 | 放射線撮像装置、放射線撮像方法、及びプログラム |
| DE102012206343B4 (de) | 2012-04-18 | 2015-08-27 | Siemens Aktiengesellschaft | Kraftausgleichsvorrichtung und Verwendung in einer medizintechnischen Anlage |
| US9277900B2 (en) | 2013-01-07 | 2016-03-08 | Samsung Electronics Co., Ltd. | X-ray imaging apparatus |
| KR102373055B1 (ko) * | 2015-02-26 | 2022-03-11 | 삼성전자주식회사 | 식기세척기 |
| CN106113039B (zh) * | 2016-07-08 | 2018-06-15 | 深圳市优必选科技有限公司 | 舵机锁位控制方法及舵机 |
| JP2024535357A (ja) | 2021-09-23 | 2024-09-30 | コーニンクレッカ フィリップス エヌ ヴェ | 医療用撮像システムのためのディテント方法 |
| EP4154817A1 (en) * | 2021-09-23 | 2023-03-29 | Koninklijke Philips N.V. | Detent process for medical imaging systems |
Family Cites Families (17)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| NL7706616A (nl) * | 1977-06-16 | 1978-12-19 | Philips Nv | Onderzoekinrichting voor het maken van schaduw- beelden van een laag van een object (lichaam). |
| DE2742642C3 (de) * | 1977-09-22 | 1985-02-21 | Philips Patentverwaltung Gmbh, 2000 Hamburg | Anordnung zum Gewichtsausgleich |
| DE2831058C2 (de) * | 1978-07-14 | 1984-04-19 | Philips Patentverwaltung Gmbh, 2000 Hamburg | Röntgenuntersuchungsgerät mit einem um eine horizontale Achse schwenkbaren Patientenlagerungstisch |
| US4380086A (en) * | 1980-11-24 | 1983-04-12 | Picker Corporation | Radiation imaging system with cyclically shiftable grid assembly |
| US4466112A (en) * | 1982-01-29 | 1984-08-14 | Technicare Corporation | Variable detector aperture |
| JPS6099906U (ja) * | 1983-12-13 | 1985-07-08 | 朝日レントゲン工業株式会社 | 歯科用x線全顎ならびに頭部規格撮影装置 |
| JP2557502B2 (ja) * | 1988-11-08 | 1996-11-27 | 株式会社モリタ製作所 | 医療用パノラマx線撮影装置 |
| JPH02245750A (ja) * | 1989-03-20 | 1990-10-01 | Hitachi Medical Corp | X線透視撮影台の速写制御装置 |
| JPH0355039A (ja) * | 1989-07-22 | 1991-03-08 | Hitachi Medical Corp | X線撮影装置における走行台車の位置検出装置 |
| JPH0464345A (ja) * | 1990-07-04 | 1992-02-28 | Toshiba Corp | X線診断装置 |
| JPH04341244A (ja) * | 1991-05-17 | 1992-11-27 | Toshiba Corp | X線診断装置 |
| JPH06269437A (ja) * | 1993-03-19 | 1994-09-27 | Hitachi Medical Corp | ディジタルx線撮影装置 |
| JPH0788108A (ja) * | 1993-09-27 | 1995-04-04 | Toshiba Corp | X線透視撮影台 |
| JPH09505175A (ja) * | 1994-09-01 | 1997-05-20 | フィリップス エレクトロニクス ネムローゼ フェンノートシャップ | 駆動装置及びそのような駆動装置を具えているx線装置 |
| JPH08131432A (ja) * | 1994-11-08 | 1996-05-28 | Hitachi Medical Corp | X線撮影装置 |
| US5636259A (en) * | 1995-05-18 | 1997-06-03 | Continental X-Ray Corporation | Universal radiographic/fluoroscopic digital room |
| US6025685A (en) * | 1997-06-11 | 2000-02-15 | Elite Access Systems, Inc. | Gate operator method and apparatus with self-adjustment at operating limits |
-
2000
- 2000-05-19 US US09/575,035 patent/US6379042B1/en not_active Expired - Lifetime
-
2001
- 2001-05-16 EP EP01304348A patent/EP1157661B1/en not_active Expired - Lifetime
- 2001-05-16 DE DE60132516T patent/DE60132516T2/de not_active Expired - Lifetime
- 2001-05-18 JP JP2001148554A patent/JP5283809B2/ja not_active Expired - Lifetime
Also Published As
| Publication number | Publication date |
|---|---|
| JP2002034959A (ja) | 2002-02-05 |
| DE60132516D1 (de) | 2008-03-13 |
| EP1157661B1 (en) | 2008-01-23 |
| EP1157661A3 (en) | 2003-08-06 |
| US6379042B1 (en) | 2002-04-30 |
| DE60132516T2 (de) | 2009-01-15 |
| EP1157661A2 (en) | 2001-11-28 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5283809B2 (ja) | X線イメージング・デバイス内のx線管の位置決め誤差を減少させるためのシステム及び方法 | |
| US5469429A (en) | X-ray CT apparatus having focal spot position detection means for the X-ray tube and focal spot position adjusting means | |
| US6461040B1 (en) | Apparatus and method to correct for position errors in diagnostic imaging | |
| JP2004344656A (ja) | Pidコントローラを使用して電動移動式c形アームにおける対象物衝突を検出するための方法及び装置 | |
| JP2001061827A (ja) | 移動形x線装置及び撮影位置の決定方法 | |
| KR20010072305A (ko) | 방사선 치료 검증 시스템 | |
| US20080123811A1 (en) | System and Method for Improved Collision Detection in an Imaging Device | |
| US7319325B2 (en) | Table position sensing for magnetic resonance imaging | |
| CN113295197B (zh) | 一种增量编码器的计数矫正方法及计数系统 | |
| FI87134C (fi) | Tandroentgenapparat foer avbildning av hela kaekar | |
| US5657498A (en) | Methods and apparatus for acquiring table elevation information | |
| FI56621C (fi) | Anordning foer stoedande av patienten vid panorama-roentgenfotografering | |
| JP2009268799A (ja) | X線ct装置 | |
| CN117741524B (zh) | 自动化全内置超导磁铁磁场强度测量装置及测量方法 | |
| CN110742610B (zh) | 检测设备、用于检测扫描床运动的方法及磁共振成像系统 | |
| US4730351A (en) | X-ray diagnostics installation | |
| JPH0643888B2 (ja) | 厚さ監視装置 | |
| JP2011229559A (ja) | 放射線撮影装置 | |
| JP4112674B2 (ja) | 磁気共鳴イメージング装置 | |
| JP3738178B2 (ja) | 画像記録方法 | |
| JPH09218170A (ja) | X線回折測定方法 | |
| JP5625258B2 (ja) | X線画像装置 | |
| JP3848348B2 (ja) | X線管制御装置 | |
| US6850594B2 (en) | Method for measuring the dose distribution in a computed tomography apparatus | |
| JP3256667B2 (ja) | X線測定装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20080516 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20080516 |
|
| RD02 | Notification of acceptance of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7422 Effective date: 20101116 |
|
| RD04 | Notification of resignation of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7424 Effective date: 20101116 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20110712 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20110913 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20120131 |
|
| A601 | Written request for extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A601 Effective date: 20120406 |
|
| A602 | Written permission of extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A602 Effective date: 20120416 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20120628 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20130205 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20130402 |
|
| TRDD | Decision of grant or rejection written | ||
| RD03 | Notification of appointment of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7423 Effective date: 20130423 |
|
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20130430 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20130529 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 5283809 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| EXPY | Cancellation because of completion of term |