JP5262575B2 - 運行管理システム - Google Patents
運行管理システム Download PDFInfo
- Publication number
- JP5262575B2 JP5262575B2 JP2008275015A JP2008275015A JP5262575B2 JP 5262575 B2 JP5262575 B2 JP 5262575B2 JP 2008275015 A JP2008275015 A JP 2008275015A JP 2008275015 A JP2008275015 A JP 2008275015A JP 5262575 B2 JP5262575 B2 JP 5262575B2
- Authority
- JP
- Japan
- Prior art keywords
- data
- information
- vehicle
- transport
- towing
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images






Landscapes
- Time Recorders, Dirve Recorders, Access Control (AREA)
Description
(1)「牽引車両No.」:牽引車両を識別するための番号
(2)「台車No.」:搬送台車を識別するための番号
(3)「重量」:搬送台車に積載された現品の重量
(4)「個数」:台車に積載された現品の個数
(5)「出発/到着」:搬送台車を牽引して当該工場から出発した、当該工場に台車を搬入して到着したかの情報
(6)「出発時刻/到着時刻」:搬送台車が当該工場から搬出または当該工場から搬入された時刻
これらのデータは、上位計算機2に送信されて、記憶装置4に運行実績データとして記憶される。
(1)荷物を積載して輸送したデータ
(2)荷物を運ぶ台車のみ輸送したデータ
(3)何も積載せず移動したデータ
図6は、牽引車両単位の移動データの作成処理フロー例を示す図である。以下、図6を参照して、具体的な処理フローを説明する。
(1)荷物を積載して輸送したデータ
(2)荷物を運ぶ台車のみ輸送したデータ
(3)何も積載せず移動したデータ
の3つのパターンに分類したデータを元に、異なる表示を行うのが、比較して管理しやすくなるので、好ましい。
2 上位計算機
3 配車計画システム
4 記憶装置
5 製造管理システム
6 車両端末
11 演算装置
12 表示装置
Claims (1)
- 牽引車両と運搬台車とが分離可能な分離型車両の運行管理を行う運行管理システムであって、
運搬台車を牽引して輸送した際に、その輸送開始時刻・位置の情報、終了時刻・位置の情報、運搬台車に荷物を積載したか否かの情報と、を記憶する記憶装置と、
前記記憶装置から運搬台車を牽引して輸送した際の情報を入力し、該入力した情報から運搬台車を牽引しないで移動した場合の終了時刻・位置と開始時刻・位置とを算出する演算装置と、
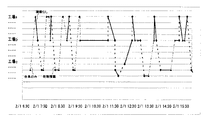
前記記憶装置に記憶された情報と前記演算装置で算出された情報を用いて、運搬台車を牽引した荷物を積載して輸送した場合と、運搬台車を牽引したが荷物を積載せず輸送した場合と、運搬台車を牽引しないで移動した場合とを、それぞれ弁別可能な形態で、同一のダイヤグラムに表示する表示装置とを備えることを特徴とする運行管理システム。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2008275015A JP5262575B2 (ja) | 2008-10-27 | 2008-10-27 | 運行管理システム |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2008275015A JP5262575B2 (ja) | 2008-10-27 | 2008-10-27 | 運行管理システム |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2010102597A JP2010102597A (ja) | 2010-05-06 |
| JP5262575B2 true JP5262575B2 (ja) | 2013-08-14 |
Family
ID=42293176
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2008275015A Active JP5262575B2 (ja) | 2008-10-27 | 2008-10-27 | 運行管理システム |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP5262575B2 (ja) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US12049152B2 (en) | 2019-05-27 | 2024-07-30 | Panasonic Intellectual Property Management Co., Ltd. | Information processing method and information processing system for generating a delivery plan using tractor information, trailer information, and delivery information |
Family Cites Families (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2002370808A (ja) * | 2001-04-09 | 2002-12-24 | Toyota Industries Corp | 移動体の稼動効率を分析する装置、および物流状況をモニタする装置 |
| JP4517735B2 (ja) * | 2004-06-08 | 2010-08-04 | Jfeスチール株式会社 | 運搬作業の計画立案装置及び運搬作業の計画立案方法 |
-
2008
- 2008-10-27 JP JP2008275015A patent/JP5262575B2/ja active Active
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US12049152B2 (en) | 2019-05-27 | 2024-07-30 | Panasonic Intellectual Property Management Co., Ltd. | Information processing method and information processing system for generating a delivery plan using tractor information, trailer information, and delivery information |
Also Published As
| Publication number | Publication date |
|---|---|
| JP2010102597A (ja) | 2010-05-06 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| Rubio et al. | Multi-objective optimization of costs and energy efficiency associated with autonomous industrial processes for sustainable growth | |
| JP5338305B2 (ja) | 車両運行計画作成方法及び装置 | |
| Battini et al. | Part-feeding with supermarket in assembly systems: transportation mode selection model and multi-scenario analysis | |
| JP5943173B2 (ja) | 荷物運搬車両作業動線画面表示システム及び画面表示方法 | |
| Whig et al. | Role of AI and IoT in intelligent transportation | |
| JP6141782B2 (ja) | 無人搬送車と在庫管理システムの連動システムにおける地図情報更新方法 | |
| Saderova et al. | Case study: The simulation modelling of selected activity in a warehouse operation | |
| JP2005104732A (ja) | ピッキングコンテナ上の無線周波数識別タグおよび注文処理側に対するピックリストの表示 | |
| JP5446204B2 (ja) | 倉庫作業計画立案支援装置 | |
| JP2008021285A (ja) | 輸送情報管理システム、輸送情報管理方法、および輸送情報管理プログラム | |
| JP2011523153A (ja) | 車両の作業指示の管理システム及び方法 | |
| JP6133682B2 (ja) | コンテナターミナルにおける海運貨物運送支援システム | |
| Pourmohammad-Zia et al. | Platooning of automated ground vehicles to connect port and hinterland: A multi-objective optimization approach | |
| JP5262575B2 (ja) | 運行管理システム | |
| JP7437839B1 (ja) | 物流管理システム、物流管理方法及びプログラム | |
| Bauters et al. | Forklift free factory: a simulation model to evaluate different transportation systems in the automotive industry | |
| Alieksieiev et al. | Towards the improvement of yard management systems (YMS) using radio frequency identification (RFID) | |
| Skender et al. | Intelligent Solutions in the Supply Chains: Challenges for 3PL Providers | |
| JP2020203766A (ja) | 配達支援システムおよび配達支援プログラム | |
| JP2005170579A (ja) | 情報管理システム | |
| JP4517735B2 (ja) | 運搬作業の計画立案装置及び運搬作業の計画立案方法 | |
| JP5434204B2 (ja) | 製品搬送作業量予測装置、製品搬送作業量予測方法、及びコンピュータプログラム | |
| Vahdani et al. | A multi-product vehicle routing scheduling model with time window constraints for cross docking system under uncertainty: A fuzzy possibilistic-stochastic programming | |
| Resat et al. | Design and development of robust optimization model for sustainable cross-docking systems: A case study in electrical devices manufacturing company | |
| Alumbugu et al. | Efficient utilisation of automation in construction materials-handling processes |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20110805 |
|
| RD03 | Notification of appointment of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7423 Effective date: 20120321 |
|
| RD04 | Notification of resignation of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7424 Effective date: 20120327 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20130322 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20130402 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20130415 |
|
| R150 | Certificate of patent or registration of utility model |
Free format text: JAPANESE INTERMEDIATE CODE: R150 Ref document number: 5262575 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |