JP5260408B2 - Time synchronization network and communication device - Google Patents
Time synchronization network and communication device Download PDFInfo
- Publication number
- JP5260408B2 JP5260408B2 JP2009126665A JP2009126665A JP5260408B2 JP 5260408 B2 JP5260408 B2 JP 5260408B2 JP 2009126665 A JP2009126665 A JP 2009126665A JP 2009126665 A JP2009126665 A JP 2009126665A JP 5260408 B2 JP5260408 B2 JP 5260408B2
- Authority
- JP
- Japan
- Prior art keywords
- time
- clock
- function
- synchronization
- time synchronization
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
Images







Landscapes
- Electric Clocks (AREA)
- Synchronisation In Digital Transmission Systems (AREA)
- Mobile Radio Communication Systems (AREA)
Abstract
Description
本発明は、時刻同期網及び通信装置に係り、特に、原振が異なる高精度のクロック同期網の同期クロックを利用することにより、原振は同一であるものの異なる時刻配信手段により時刻同期を行う通信装置間において、高精度に時刻同期する網を構成する時刻同期網及び通信装置に関するものである。 The present invention relates to a time synchronization network and a communication apparatus, and in particular, by using a synchronization clock of a high-accuracy clock synchronization network with different original oscillations, time synchronization is performed by different time distribution means although the original oscillations are the same. The present invention relates to a time synchronization network and a communication device that constitute a network for highly accurate time synchronization between communication devices.
携帯電話網の基地局装置間では、搬送波の周波数同期を取るため、又ハンドオーバー時の基地局装置間での同期を取るために、現在、例えば、10−8オーダーでの時刻同期が要求されている。従来、これを実現するために、非特許文献1(54ページ)に示されるように、各基地局は各々GPS受信アンテナを用意し、人工衛星から同報される時刻信号を受信し、時刻同期を行っている。しかし基地局の中にはGPS衛星からの電波を直接受信出来ない場所(一例として地下など)に設置されるものもあり、GPSによる時刻同期が現実的に困難なケースも存在する。これに対応し、近年、基地局装置を収容する伝送網のパケット化の進展に伴い、比較的高い精度での時刻同期を実現するIEEE1588などによるパケットベースでの時刻同期を行う方向性も探られている。しかし、IEEE1588による時刻同期精度はサブマイクロ秒、即ち10−7オーダーであり、携帯電話基地局装置間に要求されている10−8という同期精度を実現する為には、性能が不足している場合が想定される。
IEEE1588については、より高精度のクロック同期を必要とするテレコムネットワークでの適用も検討され始めており、非特許文献2(Page15〜Page17)に示される様に、IEEE1588による時刻補正間隔を短縮することにより、精度を高める方向での規格化が進められている。しかし、この方式では時刻補正間隔の短縮により、主信号トラフィックに占める時刻補正パケットの比率が高まり、ネットワーク負荷が増大するという課題があり、これに対する解として、同じく非特許文献2(Page15〜Page17)に示される様に、時刻同期メッセージ用のパケットの長さを短縮するという方向での規格化が進められている。しかし、いずれにしても同期精度の向上に伴い、時刻補正間隔の短縮によるネットワーク負荷は増大する傾向にある。
In order to synchronize the frequency of carrier waves between base station apparatuses of a cellular phone network and to synchronize between base station apparatuses at the time of handover, for example, time synchronization on the order of 10 −8 is currently required. ing. Conventionally, in order to realize this, as shown in Non-Patent Document 1 (page 54), each base station prepares a GPS receiving antenna, receives a time signal broadcast from an artificial satellite, and synchronizes time. It is carried out. However, some base stations are installed in places where radio waves from GPS satellites cannot be received directly (for example, underground), and there are cases where time synchronization by GPS is actually difficult. Correspondingly, in recent years, with the progress of packetization of transmission networks that accommodate base station apparatuses, the direction of performing packet-based time synchronization by IEEE 1588 that realizes time synchronization with relatively high accuracy is also sought. ing. However, the time synchronization accuracy according to IEEE 1588 is sub-microsecond, that is, 10 −7 order, and the performance is insufficient to realize the synchronization accuracy of 10 −8 required between mobile phone base station apparatuses. A case is assumed.
As for IEEE 1588, application to a telecom network that requires more accurate clock synchronization is also being studied. As shown in Non-Patent Document 2 (
一方、従来のIEEE1588プロトコルでも、基地局装置を収容するパケット伝送網上の各パケット伝送装置において、要求される時刻同期精度である、例えば10−8よりも高精度の発信機を実装し、時刻補正が行われない間時計を自走することにより、要求される精度を実現することが可能である。例えば、一般的なIEEE1588の動作環境において、時刻補正間隔を1秒と考える。パケット伝送装置に搭載するクロックの精度が10−9である場合、10−8オーダーのクロック1周期は、10−9オーダーのクロック10周期と同一時間である。同期を必要とする複数の基地局装置が、各々10−9オーダーの精度のクロックを搭載する際、各基地局装置搭載のクロック間で、1秒当たり最悪10−9オーダーのクロック1クロック分の差分が発生する。言い換えると、10−9オーダーの精度のクロックで駆動する時計間で、10−8オーダーのクロック1周期分の差分が発生するまでには、10秒間を要すると言う事が出来る。従って、10秒よりも短い周期、例えば1/10であるところの1秒オーダーの間隔で、二つの時計の間の時刻補正を行うことにより、10−8オーダーの時刻同期を行うことが可能である。以上より、この例では、最低でも10−9オーダーの精度のクロックで駆動する時計を使用し、IEEE1588プロトコルを動作することにより、携帯電話基地局装置間で要求される10−8オーダーの精度での時刻同期が可能となる。しかし実際には、温度など周囲環境の変化が発生した場合にも安定的に10−9オーダー以上の高精度クロックを発生するクロックは原子時計に準じるレベルであり、コストが高いと考えられる。 On the other hand, even in the conventional IEEE 1588 protocol, each packet transmission device on the packet transmission network that accommodates the base station device is mounted with a transmitter having a higher accuracy than the required time synchronization accuracy, for example, 10 −8. It is possible to achieve the required accuracy by running the watch while it is not being corrected. For example, in a general IEEE 1588 operating environment, the time correction interval is assumed to be 1 second. When the accuracy of the clock mounted on the packet transmission device is 10 −9 , one clock cycle of the 10 −8 order is the same time as the 10 clock cycles of the 10 −9 order. When a plurality of base station apparatuses that require synchronization are each equipped with a clock having an accuracy of the order of 10 −9 , the clock of the worst 10 −9 order per second is required between the clocks mounted on each base station apparatus. Differences occur. In other words, it can be said that it takes 10 seconds to generate a difference corresponding to one cycle of a clock of 10 −8 order between clocks driven by a clock having an accuracy of 10 −9 order. Therefore, it is possible to perform time synchronization on the order of 10 −8 by correcting the time between the two clocks at a cycle shorter than 10 seconds, for example, at an interval of the order of 1 second, which is 1/10. is there. As described above, in this example, a clock driven with a clock having an accuracy of at least 10 −9 order is used, and the IEEE 1588 protocol is operated, so that the accuracy of the order of 10 −8 is required between mobile phone base station apparatuses. Time synchronization is possible. However, in reality, a clock that stably generates a high-accuracy clock of the order of 10 −9 or higher even when a change in the ambient environment such as temperature occurs occurs at a level that conforms to an atomic clock, and is considered to be expensive.
ここで、携帯電話基地局を収容する伝送装置側に目を向ける。従来携帯電話基地局を収容するSDH/SONET伝送装置には、SDH/SONETインタフェース経由で、現状では、例えば、10−12オーダーのクロック同期をすることが要求されている。これを実現する為に、伝送装置を階層的に配置し、クロック同期網を構成し、最上位階層の伝送装置に対し、高精度のクロック源からクロックを供給し、以降、下位層の伝送装置は、上位層の伝送装置から受信するデータより、可変発振器によりクロックを再生抽出し、このクロックに同期することにより、伝送網内全体で、要求された精度でのクロック同期を実現している。又、近年の伝送網のパケット化の進展に伴い、パケット網内での高精度のクロック同期を実現する為に、ITU−TにおいてSynchronous Ethernet(登録商標)(ITU−T G.8261,G.8262)の規格化が行われ、パケット網においても、従来のSDH/SONETと同等の精度でのクロック同期が可能となっている。
しかし、伝送装置により構成されるクロック同期網、又はパケット伝送装置により構成されるクロック同期網は、高精度のクロック同期を行ってはいるが、時刻の管理を行っておらず、又、GPS側のクロックとも同期していない。
Here, we turn our attention to the transmission apparatus side that accommodates the mobile phone base station. Conventionally, an SDH / SONET transmission apparatus that accommodates a mobile phone base station is required to perform clock synchronization on the order of, for example, 10 −12 via an SDH / SONET interface. In order to realize this, transmission devices are arranged in a hierarchy, a clock synchronous network is configured, a clock is supplied from a high-accuracy clock source to a transmission device in the highest layer, and thereafter, transmission devices in lower layers The clock is regenerated and extracted from the data received from the upper layer transmission apparatus by a variable oscillator and synchronized with this clock, thereby realizing clock synchronization with the required accuracy in the entire transmission network. In addition, with the progress of packetization of transmission networks in recent years, in order to realize high-accuracy clock synchronization within the packet network, Synchronous Ethernet (registered trademark) (ITU-T G.8261, G. 8262) has been standardized, and clock synchronization is possible in the packet network with the same accuracy as conventional SDH / SONET.
However, the clock synchronization network configured by the transmission device or the clock synchronization network configured by the packet transmission device performs high-accuracy clock synchronization, but does not perform time management, and the GPS side It is not synchronized with other clocks.
本発明が解決しようとする課題は、GPSによる時刻同期を行う基地局装置と、GPSによる時刻同期をIEEE1588などのプロトコルによりパケット網経由で行う基地局装置が同一ネットワーク中に存在する場合に、両者の時刻同期を要求精度内で実現しようとした場合に、時刻補正間隔の短縮に伴いネットワークの負荷が増大するか、又は、高精度発振器の搭載によるコスト増加を招くことになる点である。
本発明は、以上の点に鑑み、ネットワークの負荷を増大させず、又は、高精度発振器の搭載によるコスト増加を招くことなく、基地局及び/又は通信装置の時刻同期を要求精度内で実現することを目的とする。
The problem to be solved by the present invention is that both a base station apparatus that performs time synchronization by GPS and a base station apparatus that performs time synchronization by GPS using a protocol such as IEEE 1588 exist in the same network. If the time synchronization is to be realized within the required accuracy, the load on the network increases as the time correction interval is shortened, or the cost increases due to the mounting of a high-precision oscillator.
In view of the above, the present invention realizes time synchronization of a base station and / or a communication device within the required accuracy without increasing the network load or increasing the cost due to the mounting of a high-precision oscillator. For the purpose.
本発明は、例えば、伝送網側で実現している、安定的で高精度なクロック同期機能により供給されるクロックと、これとは異なるGPS由来のクロックとの差分検出機能を持ち、伝送網側の高精度な網同期クロックにより動作し、且つ差分検出機能により適宜補正を行うGPSエミュレーション時計を使用し、IEEE1588などの時刻同期プロトコルを動作させることを最も主要な特徴とする。 The present invention has, for example, a function for detecting a difference between a clock supplied by a stable and highly accurate clock synchronization function realized on the transmission network side and a clock derived from GPS different from this, and the transmission network side The main feature is to operate a time synchronization protocol such as IEEE 1588 using a GPS emulation clock that operates with a high-accuracy network synchronization clock and corrects appropriately with a difference detection function.
本発明の第1の解決手段によると、
複数の通信装置が階層構造を有し、時刻同期プロトコルによりネットワーク経由で配信される時刻情報により複数の前記通信装置間において時刻同期を行うための時刻同期網において、
前記時刻同期網の最上位の通信装置は、
時刻源となる時計から時刻情報を受信する時刻受信機能と、
前記時刻源となる時計と非同期で前記時刻源より高精度な外部発振器からの外部参照クロック信号を受信し、該外部参照クロック信号に同期するクロック信号を生成する外部クロック受信機能と、
前記外部クロック受信機能が生成したクロック信号周期の計数を元に、外部発振器由来の時間を算出し、前記時刻源となる時計から受信した時刻を元に前記時刻源由来の時間を算出し、前記外部発振器由来の時間と前記時刻源由来の時間との比較から、前記時刻源による原振と前記外部発振器による原振の二つの原振間の時間の差分情報を検出する原振間オフセット検出機能と、
前記外部クロック受信機能が生成したクロック信号を元に駆動するとともに、前記原振間オフセット検出機能により検出された時間の差分情報に基づき時刻を補正することにより、前記時刻同期プロトコルによる時刻同期より高精度で前記時刻源となる時計に同期する主局エミュレーション時計と、
前記主局エミュレーション時計からの時刻情報を元に、前記時刻同期プロトコルに従い時刻同期メッセージを生成するマスター機能と、
前記時刻同期メッセージを、前記外部クロック受信機能より供給されるクロック信号に同期するタイミングで生成される伝送符号により、下位の通信装置へ送出する機能と
を備え、
前記時刻同期網の最上位以外の通信装置は、
前記時刻同期メッセージを上位の通信装置から受信し、
前記上位の通信装置と接続された伝送路の信号の伝送符号よりクロック成分を抽出し、最上位の通信装置のクロックに前記時刻源より高精度に同期するクロック信号を生成する主信号クロック抽出機能と、
前記時刻同期プロトコルにより配信された時刻同期メッセージから時刻情報を抽出する前記時刻同期プロトコルにおけるスレーブ機能と、
前記主信号クロック抽出機能が生成したクロック信号周期の計数を元に、主信号クロック由来の時間を算出し、前記スレーブ機能が受信した時刻より時刻同期プロトコル由来の時間を算出し、前記主信号クロック由来の時間と前記時刻同期プロトコル由来の時間との比較から、二つのクロック源間の時間の差分情報を検出するクロック源間オフセット検出機能と、
前記主信号クロック抽出機能により生成したクロック信号を元に駆動するとともに、前記クロック源間オフセット検出機能により検出された時間の差分情報に基づき時刻を補正することにより、前記時刻同期プロトコルより高精度で前記スレーブ機能の時刻、前記主局エミュレーション時計の時刻、及び前記時刻源となる時計の時刻に同期する従局エミュレーション時計と、
を備えた
前記時刻同期網が提供される。
According to the first solution of the present invention,
In a time synchronization network for performing time synchronization among a plurality of the communication devices according to time information distributed over the network by a time synchronization protocol, the plurality of communication devices have a hierarchical structure,
The highest level communication device of the time synchronization network is:
And the time reception function of receiving the time information from the clock to the time Kokugen,
An external clock reception function that receives an external reference clock signal from an external oscillator that is asynchronous with the time source clock and is more accurate than the time source, and generates a clock signal that is synchronized with the external reference clock signal;
Based on the clock signal cycle count generated by the external clock reception function, to calculate the time derived from the external oscillator, to calculate the time from the time source based on the time received from the time source clock, By comparing the time from the external oscillator and the time from the time source, the offset detection function between the original oscillators detects time difference information between the original oscillator by the time source and the original oscillator by the external oscillator. When,
Driving based on the clock signal generated by the external clock reception function and correcting the time based on the time difference information detected by the offset detection function between original oscillations, it is possible to achieve higher time synchronization than the time synchronization protocol. A master station emulation clock that is synchronized with the time source clock with accuracy;
Based on the time information from the main station emulation clock, a master function to generate a time synchronization message according to the time synchronization protocol;
A function of sending the time synchronization message to a lower-level communication device by a transmission code generated at a timing synchronized with a clock signal supplied from the external clock reception function;
A communication device other than the highest level of the time synchronization network is:
Receiving the time synchronization message from a higher-level communication device;
A main signal clock extraction function that extracts a clock component from a transmission code of a signal on a transmission line connected to the higher-level communication device, and generates a clock signal synchronized with the clock of the highest-level communication device with high accuracy from the time source When,
A slave function in the time synchronization protocol for extracting time information from a time synchronization message distributed by the time synchronization protocol;
Based on the count of the clock signal period generated by the main signal clock extraction function, the time derived from the main signal clock is calculated, the time derived from the time synchronization protocol is calculated from the time received by the slave function, and the main signal clock From the comparison between the time derived from the time and the time derived from the time synchronization protocol, an offset detection function between clock sources that detects time difference information between two clock sources,
Driving based on the clock signal generated by the main signal clock extraction function and correcting the time based on the difference information of the time detected by the offset detection function between clock sources, it is more accurate than the time synchronization protocol. A slave emulation clock synchronized with the time of the slave function, the time of the master station emulation clock, and the time of the clock as the time source;
The time synchronization network is provided.
本発明の第2の解決手段によると、
複数の通信装置が階層構造を有し、時刻同期プロトコルによりネットワーク経由で配信される時刻情報により複数の前記通信装置間において時刻同期を行うための時刻同期網における最上位の通信装置であって、
時刻源となる時計から時刻情報を受信する時刻受信機能と、
前記時刻源となる時計と非同期で前記時刻源より高精度な外部発振器からの外部参照クロック信号を受信し、該外部参照クロック信号に同期するクロック信号を生成する外部クロック受信機能と、
前記外部クロック受信機能が生成したクロック信号周期の計数を元に、外部発振器由来の時間を算出し、前記時刻源となる時計から受信した時刻を元に前記時刻源由来の時間を算出し、前記外部発振器由来の時間と前記時刻源由来の時間との比較から、前記時刻源による原振と前記外部発振器による原振の二つの原振間の時間の差分情報を検出する原振間オフセット検出機能と、
前記外部クロック受信機能が生成したクロック信号を元に駆動するとともに、前記原振間オフセット検出機能により検出された時間の差分情報に基づき時刻を補正することにより、前記時刻同期プロトコルによる時刻同期より高精度で前記時刻源となる時計に同期する主局エミュレーション時計と、
前記主局エミュレーション時計からの時刻情報を元に、前記時刻同期プロトコルに従い時刻同期メッセージを生成するマスター機能と、
前記時刻同期メッセージを、前記外部クロック受信機能より供給されるクロック信号に同期するタイミングで生成される伝送符号により、下位の通信装置へ送出する機能と
を備えた前記通信装置が提供される。
According to the second solution of the present invention,
A plurality of communication devices has a hierarchical structure, and is a top-level communication device in a time synchronization network for performing time synchronization between the plurality of communication devices based on time information distributed via a network by a time synchronization protocol,
And the time reception function of receiving the time information from the clock to the time Kokugen,
An external clock reception function that receives an external reference clock signal from an external oscillator that is asynchronous with the time source clock and is more accurate than the time source, and generates a clock signal that is synchronized with the external reference clock signal;
Based on the clock signal cycle count generated by the external clock reception function, to calculate the time derived from the external oscillator, to calculate the time from the time source based on the time received from the time source clock, By comparing the time from the external oscillator and the time from the time source, the offset detection function between the original oscillators detects time difference information between the original oscillator by the time source and the original oscillator by the external oscillator. When,
Driving based on the clock signal generated by the external clock reception function and correcting the time based on the time difference information detected by the offset detection function between original oscillations, it is possible to achieve higher time synchronization than the time synchronization protocol. A master station emulation clock that is synchronized with the time source clock with accuracy;
Based on the time information from the main station emulation clock, a master function to generate a time synchronization message according to the time synchronization protocol;
The communication device is provided with a function of sending the time synchronization message to a lower communication device using a transmission code generated at a timing synchronized with a clock signal supplied from the external clock reception function.
本発明の第3の解決手段によると、
複数の通信装置が階層構造を有し、時刻同期プロトコルによりネットワーク経由で配信される時刻情報により複数の前記通信装置間において時刻同期を行うための時刻同期網における最上位以外の通信装置であって、
上位の通信装置のエミュレーション時計からの時刻情報を元に時刻同期プロトコルに従い生成され、且つ、時刻源より高精度な外部発振器からの外部参照クロック信号と同期するタイミングで生成される伝送符号により送出された時刻同期メッセージを上位の通信装置から受信し、
前記上位の通信装置と接続された伝送路の信号の伝送符号よりクロック成分を抽出し、最上位の通信装置のクロックに前記時刻源より高精度に同期するクロック信号を生成する主信号クロック抽出機能と、
前記時刻同期プロトコルにより配信された時刻同期メッセージから時刻情報を抽出する前記時刻同期プロトコルにおけるスレーブ機能と、
前記主信号クロック抽出機能が生成したクロック信号周期の計数を元に、主信号クロック由来の時間を算出し、前記スレーブ機能が受信した時刻より時刻同期プロトコル由来の時間を算出し、前記主信号クロック由来の時間と前記時刻同期プロトコル由来の時間との比較から、二つのクロック源間の時間の差分情報を検出するクロック源間オフセット検出機能と、
前記主信号クロック抽出機能により生成したクロック信号を元に駆動するとともに、前記クロック源間オフセット検出機能により検出された時間の差分情報に基づき時刻を補正することにより、前記時刻同期プロトコルより高精度で前記スレーブ機能の時刻、前記主局エミュレーション時計の時刻、及び前記時刻源となる時計の時刻に同期する従局エミュレーション時計と、
を備えた前記通信装置が提供される。
According to the third solution of the present invention,
A communication device other than the highest level in a time synchronization network for performing time synchronization between a plurality of communication devices based on time information distributed via a network by a time synchronization protocol, wherein the plurality of communication devices have a hierarchical structure. ,
Generated according to the time synchronization protocol based on the time information from the emulation clock of the higher-level communication device, and sent out by the transmission code generated at the timing synchronized with the external reference clock signal from the external oscillator with higher accuracy than the time source Received a time synchronization message from a higher-level communication device,
A main signal clock extraction function that extracts a clock component from a transmission code of a signal on a transmission line connected to the higher-level communication device, and generates a clock signal synchronized with the clock of the highest-level communication device with high accuracy from the time source When,
A slave function in the time synchronization protocol for extracting time information from a time synchronization message distributed by the time synchronization protocol;
Based on the count of the clock signal period generated by the main signal clock extraction function, the time derived from the main signal clock is calculated, the time derived from the time synchronization protocol is calculated from the time received by the slave function, and the main signal clock From the comparison between the time derived from the time and the time derived from the time synchronization protocol, an offset detection function between clock sources that detects time difference information between two clock sources,
Driving based on the clock signal generated by the main signal clock extraction function and correcting the time based on the difference information of the time detected by the offset detection function between clock sources, it is more accurate than the time synchronization protocol. A slave emulation clock synchronized with the time of the slave function, the time of the master station emulation clock, and the time of the clock as the time source;
The communication apparatus is provided.
本発明によると、ネットワークの負荷を増大させず、又は、高精度発振器の搭載によるコスト増加を招くことなく、基地局及び/又は通信装置の時刻同期を要求精度内で実現出来るという格別の効果がある。
本発明は、例えば、GPSによる時刻同期を行う基地局装置と、GPSによる時刻同期をIEEE1588などのプロトコルによりパケット網経由で行う基地局装置が同一ネットワーク中に存在する場合等に、格別の効果を奏する。
According to the present invention, there is a special effect that the time synchronization of the base station and / or the communication device can be realized within the required accuracy without increasing the network load or incurring the cost increase due to the mounting of the high-precision oscillator. is there.
The present invention has a special effect when, for example, a base station apparatus that performs time synchronization using GPS and a base station apparatus that performs time synchronization using GPS via a packet network using a protocol such as IEEE 1588 exist in the same network. Play.
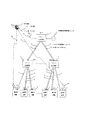
図1は、本実施の形態の時刻同期網のシステム構成図である。
本図では、階層的に構成したクロック同期網、及び時刻同期網の構成概要を示している。時刻同期網は、時刻同期網及びクロック同期網の最上位となる主局設置のパケット伝送装置1、主局のクロック及び時刻に同期して動作する従局設置の伝送装置2を多段に接続して階層的に構成する。本例では、クロック及び時刻同期網の末端に、GPSアンテナ13を有しGPS衛星6からのGPS信号73により時刻を受信可能な基地局装置3と、クロック及び時刻同期網の末端装置として動作する基地局装置4を接続している。尚、本例ではクロック同期網は、一例として、Synchronous Ethernetを、時刻同期網はIEEE1588を使用しているが、例えば時刻同期についてはNTPなど他のプロトコルを使用しても良い。
主局設置のパケット伝送装置1はGPSアンテナ13を有し、GPS衛星6から受信するGPS信号73より時刻情報の配信を受ける機能を有する。又、高精度網同期原振クロック5より高精度の網同期用クロックを受信する機能を有する。更に、Synchronous Ethernetにより、高精度網同期原振クロック5から受信したクロックに同期したEthernet信号71の送出機能を有するとともに、IEEE1588マスター装置として動作し、従局設置のパケット伝送装置に対し、マスタークロックに同期したSynchronous Ethernet信号を伝達し、且つIEEE1588メッセージ72により時刻同期を行う機能を有する。
FIG. 1 is a system configuration diagram of a time synchronization network according to the present embodiment.
This figure shows an outline of the configuration of a hierarchically structured clock synchronization network and time synchronization network. The time synchronization network is composed of a
The
従局設置のパケット伝送装置2は、主局又は上位の従局から受信したSynchronous Ethernet信号71よりクロックを抽出し網同期を行うとともに、IEEE1588メッセージ72により時刻情報の配信を受け、主局のクロック及び時計に従属して動作する機能を有する。又、Synchronous Ethernetにより、主局又は上位の従局のクロックに同期したSynchronous Ethernet信号71の送出機能を有するとともに、IEEE1588マスター装置として動作し、従局設置のパケット伝送装置に対し、マスタークロックに同期したEthernet信号を伝達し、且つIEEE1588メッセージ72により時刻同期を行う機能を有する。
尚、本実施の形態において、IEEE1588により同期を図る時刻は、GPS衛星6により配信される時刻に同期しており、Synchronous Ethernetにより同期を図るクロックは高精度網同期原振クロック5より供給されるクロックに同期している。主局設置のパケット伝送装置1、及び従局設置のパケット伝送装置2においては、GPS衛星6により配信される時刻を内部発振器によらず、Synchronous Ethernetにより高精度に大元の高精度網同期原振クロック5に同期したクロックで駆動し、且つ高精度に追従する時計を有するという特徴を持つ。
ここで、以降の説明の簡単化の為、用語の定義をする。先ず、時刻という用語について定義する。時刻は、12時00分00秒などのように、ある唯一の時点を表す識別情報であるとする。次に時間という用語について定義する。時間は時の幅を表す量である。即ち、ある二つの時刻の差分として定義することが出来、また、ある単位時間の累積として定義することが出来る。時刻12時00分00秒と時刻13時00分00秒の差分として表される時間は1時間00分00秒である。又、1秒間という時間を30回累積として表される時間は30秒である。
本図の説明の最後に、GPSによる時刻同期と網同期によるクロック同期の精度の概略、及び網同期による時刻同期に求められる精度を説明する。先ず、主局設置のパケット伝送装置1、及び基地局装置3がGPS衛星より配信される時刻情報に同期する精度は10−8である。又、網同期によるクロック同期の精度は10−12である。一般に、GPS衛星により配信される時刻情報に対する同期精度が10−8であることから、網同期による時刻同期の精度についても、末端の基地局装置4において10−8の精度を維持する必要がある。一般にIEEE1588における時刻同期精度はサブマイクロ秒オーダー、すなわち10−7程度の精度と言われており、時刻同期の精度を一桁以上向上させることが求められる条件となる。
The
In the present embodiment, the time to be synchronized by IEEE 1588 is synchronized with the time distributed by the
Here, in order to simplify the following explanation, terms are defined. First, the term time will be defined. The time is assumed to be identification information representing a single point in time, such as 12:00:00. Next we define the term time. Time is a quantity that represents the width of time. That is, it can be defined as the difference between two time points, or can be defined as the accumulation of a certain unit time. The time represented as the difference between the time of 12:00:00 and the time of 13:00:00 is 1 hour 00:00. Also, the time represented as 30 times of 1 second is 30 seconds.
At the end of the description of this figure, an outline of accuracy of clock synchronization by GPS and time synchronization by network synchronization and accuracy required for time synchronization by network synchronization will be described. First, the accuracy with which the
図2は、IEEE1588において示されている時刻同期プロトコルの概要を示したものである。
以下に、本図を用いて、IEEE1588時刻同期プロトコルの概要を説明し、時刻同期メッセージに搭載する時刻情報が、単純にGPSにより配信される時刻をそのまま配信すれば良い訳でなく、GPS時刻配信の合間にも自走し、かつ高い精度でGPS時刻に同期する時計により得られる時刻情報を必要とすることを説明する。
FIG. 2 shows an overview of the time synchronization protocol shown in IEEE 1588.
Hereinafter, the outline of the IEEE 1588 time synchronization protocol will be described with reference to this figure, and the time information mounted in the time synchronization message is not simply distributed as it is by the GPS time distribution. It will be explained that time information obtained by a timepiece which is self-propelled between the two and is synchronized with GPS time with high accuracy is required.
はじめに、IEEE1588時刻同期プロトコルの概要を説明する。伝送路により接続された二つの装置間で情報の授受を行う場合、伝送距離に応じた伝送遅延が発生する。この為、ある時点の時刻情報を搭載したメッセージも、受信する際には伝送遅延分の遅れを加味する必要がある。IEEE1588では、この点に留意し、二装置間の時刻のずれと伝送遅延という二つのパラメータを検出するプロトコルを構成し、時刻補正を行う方式を取っている。IEEE1588では、時刻同期の元となる情報を提供する装置の方をマスター、提供された時刻情報に追随する装置の方をスレーブと呼んでいる。本図では、プロトコルの解説にあたり、シーケンス図を使用しており、マスター側のマスター時刻113、及びスレーブ側のスレーブ時刻114の間でメッセージの授受を行う様子を時系列に記述している。時系列としては、図の上から下に向かって時間が経過していく。マスター装置側では、時刻同期周期121で、周期的に時刻同期プロトコルを起動する。尚、この時刻同期周期121は、この例では、1秒以上と定義されているが、これに限られず適宜の値とすることができる。マスター装置側では時刻同期プロトコルを起動するタイミングになると、先ずこの時点のマスター側の時刻情報t1を記録し、Syncメッセージ115をスレーブ装置側へ送出する。スレーブ側装置では、Syncメッセージ115を受信すると、受信した時点のスレーブ装置の時刻t2を記録する。続いて、マスター装置はSyncメッセージ115を送出した時刻t1の情報を搭載したFollow_Upメッセージを116送出する。この一連のプロトコルにより、スレーブ装置側はマスター側がSyncメッセージ115を送出したマスター側時刻t1と自装置がSyncメッセージ115を受信したスレーブ側時刻t2の情報を得る。この二つの時刻情報の間の差である時間を計算することにより、スレーブ装置側はマスター側時刻113とスレーブ側時刻114のずれと伝送路遅延の和の時間を得ることが出来る。続いて、スレーブ装置はDelay_Reqメッセージ117をマスター装置に向けて送出するとともに、Delay_Reqメッセージ117を送出した時刻t3を記録する。Delay_Reqメッセージ117を受信したマスター装置は、その時点の時刻t4を記録し、Delay_Respメッセージ118に時刻情報t4を記載してスレーブ装置に向けて送出する。これにより、スレーブ装置はスレーブ装置がDelay_Reqメッセージを送出したスレーブ側時刻t3とマスター装置がDelay_Reqメッセージを受信したマスター側時刻t4の情報を得る。この二つの時刻情報の間の差である時間を計算することにより、スレーブ側装置はマスター側時刻113とスレーブ側時刻114の間のずれと伝送路遅延の和の時間を得ることが出来る。但し、ここで得られる時間情報は、先程のSyncメッセージ115、Follow_Upメッセージ116により得られる時間情報に対して、メッセージの送受方向が反転した関係となっており、マスター側時刻113とスレーブ側時刻114のずれについては正負反転した状態で加算された値となっている。Syncメッセージ115とFollow_Upメッセージ116の送受により得られる時間と、Delay_Reqメッセージ117とDelay_Respメッセージ118の送受により得られる時間の和は伝送路遅延の二倍の時間に相当し、各々の時間の差はマスター側時刻113とスレーブ側時刻114のずれの二倍の時間に相当する。以上より、スレーブ側装置はマスター側時刻113とスレーブ側時刻114との間のずれ時間の情報を知り、スレーブ側時刻114をマスター側時刻113に追従することが可能となる。 First, an outline of the IEEE 1588 time synchronization protocol will be described. When information is exchanged between two devices connected by a transmission path, a transmission delay corresponding to the transmission distance occurs. For this reason, it is necessary to consider a delay corresponding to a transmission delay when receiving a message carrying time information at a certain time. IEEE 1588 pays attention to this point, and adopts a method of correcting the time by configuring a protocol that detects two parameters, a time lag between two devices and a transmission delay. In IEEE 1588, a device that provides information on which time synchronization is based is called a master, and a device that follows the provided time information is called a slave. In this figure, a sequence diagram is used to explain the protocol, and a state in which messages are exchanged between the master time 113 on the master side and the slave time 114 on the slave side is described in time series. As time series, time passes from the top to the bottom of the figure. On the master device side, the time synchronization protocol is periodically activated in the time synchronization period 121. The time synchronization period 121 is defined as 1 second or longer in this example, but is not limited to this and may be an appropriate value. At the timing of starting the time synchronization protocol on the master device side, first, the time information t1 on the master side at this time is recorded, and the Sync message 115 is sent to the slave device side. When the slave device receives the Sync message 115, it records the time t2 of the slave device at the time of reception. Subsequently, the master device sends 116 a Follow_Up message carrying information of the time t1 at which the Sync message 115 was sent. By this series of protocols, the slave device side obtains information on the master side time t1 at which the master side sent the Sync message 115 and the slave side time t2 at which the own device received the Sync message 115. By calculating the time that is the difference between the two pieces of time information, the slave device side can obtain the sum of the shift between the master side time 113 and the slave side time 114 and the transmission path delay. Subsequently, the slave device sends the Delay_Req message 117 to the master device, and records the time t3 at which the Delay_Req message 117 is sent. The master device that has received the Delay_Req message 117 records the time t4 at that time, writes the time information t4 in the Delay_Resp message 118, and sends it to the slave device. As a result, the slave device obtains information on the slave side time t3 when the slave device sends the Delay_Req message and the master side time t4 when the master device receives the Delay_Req message. By calculating the time which is the difference between the two pieces of time information, the slave side device can obtain the sum of the deviation between the master side time 113 and the slave side time 114 and the transmission path delay. However, the time information obtained here has a relationship in which the message transmission / reception direction is reversed with respect to the time information obtained by the previous Sync message 115 and Follow_Up message 116, and the master side time 113 and the slave side time 114. The deviation is a value added in a state where the sign is inverted. The sum of the time obtained by transmission / reception of the Sync message 115 and the Follow_Up message 116 and the time obtained by transmission / reception of the Delay_Req message 117 and the Delay_Resp message 118 corresponds to twice the transmission line delay. This corresponds to twice the time difference between the side time 113 and the slave side time 114. From the above, the slave side device can know the information of the time difference between the master side time 113 and the slave side time 114, and can follow the slave side time 114 to the master side time 113.
しかし、ここでIEEE1588による時刻同期周期121は1秒以上であり、またGPSによる時刻配信周期も1秒である。この為、マスター側において少なくとも1秒間は自装置内のクロックにより駆動し、必要な精度でGPS時刻をエミュレートし、且つ必要な時間分解能を有する時計が必要である。本実施の形態では、このGPS時刻をエミュレートする時計を駆動する高精度のクロック源として、高精度の内部発振器ではなく、クロック同期により得られる高精度な同期クロックを使用する点を特徴としている。
本図の説明の最後に、IEEE1588プロトコルの動作を実際の例に従い、概観する。先ず、マスター側装置とスレーブ側装置の時刻のずれが10nsecであったとする。又、マスター側装置とスレーブ側装置は20kmの伝送路で接続されている、即ち5nsec/mの伝送路遅延があると仮定すると、100μsecの伝送路遅延があるものとする。今、マスター側装置において、12:00:00の時点でSyncメッセージを、スレーブ側装置が12:00:00+0.1secの時点でDelay_Reqメッセージを発行するとした場合、t1〜t4の値はマスター側の時刻を基準に考えると以下の様になる。
t1=12:00:00
t2=12:00:00+10nsec+100μsec
t3=12:00:00+0.1sec+10nsec
t4=12:00:00+0.1sec+100μsec
各時刻情報を元に、時間差を求める。
t2−t1=100,010nsec=伝送路遅延+マスタースレーブ間の時間差
t4−t3= 99,990nsec=伝送路遅延−マスタースレーブ間の時間差
以上より、伝送路遅延及びマスタースレーブ間の時間差(時刻のずれ)を以下の様に求めることが出来る。
伝送路遅延={(t2−t1)+(t4−t3)}/2=100μsec
マスタースレーブ間の時間差={(t2−t1)−(t4−t3)}/2=10nsec
However, here, the time synchronization period 121 based on IEEE 1588 is 1 second or more, and the time distribution period based on GPS is also 1 second. For this reason, a clock that is driven on the master side by a clock in its own device for at least one second, emulates GPS time with a required accuracy, and has a required time resolution is required. The present embodiment is characterized in that, as a high-accuracy clock source for driving a clock that emulates this GPS time, a high-accuracy synchronous clock obtained by clock synchronization is used instead of a high-accuracy internal oscillator. .
At the end of the description of this figure, the operation of the IEEE 1588 protocol is outlined according to actual examples. First, it is assumed that the time difference between the master side device and the slave side device is 10 nsec. Further, assuming that the master side device and the slave side device are connected by a transmission line of 20 km, that is, there is a transmission line delay of 5 nsec / m, it is assumed that there is a transmission line delay of 100 μsec. If the master side device issues a Sync message at the time of 12:00, and the slave side device issues the Delay_Req message at the time of 12:00: 0 + 0.1 sec, the values of t1 to t4 are Considering the time as a reference, it is as follows.
t1 = 12: 00
t2 = 12: 00: 0 + 10 nsec + 100 μsec
t3 = 12: 00: 0 + 0.1 sec + 10 nsec
t4 = 12: 00: +0.1 sec + 100 μsec
The time difference is obtained based on each time information.
t2-t1 = 100,010 nsec = transmission path delay + time difference between master and slave t4-t3 = 99,990 nsec = transmission path delay−time difference between master and slave ) Can be obtained as follows.
Transmission line delay = {(t2−t1) + (t4−t3)} / 2 = 100 μsec
Time difference between master and slave = {(t2-t1)-(t4-t3)} / 2 = 10 nsec
次に、本実施の形態により構成するクロック同期、及び時刻同期網内の各パケット伝送装置の構成、及び動作を説明する。
図3は、主局設置のパケット伝送装置1の構成例を示したものである。
主局設置のパケット伝送装置1は、外部クロック受信機能21、原振間オフセット検出機能23とGPS時刻受信機能25とGPS時刻補正機能10と主局GPSエミュレーション時計9を有する自走GPS時計機能8、設定情報記憶機能28とIEEE1588時刻補正間隔算出機能29とIEEE1588時刻同期メッセージ送受信機能30を有するIEEE1588マスター機能11、GPSアンテナ13、及びクロック同期パケット符号送受信機能12を備える。外部クロック受信機能21は高精度網同期原振クロック5に接続され、GPSアンテナ13はGPS衛星6よりGPS信号並びにGPS信号内の時刻情報を受信し、設定情報記憶機能28は外部監視制御装置20に接続し、クロック同期パケット符号送受信機能12は、従局設置のパケット伝送装置2に接続する。
Next, the configuration and operation of each packet transmission apparatus in the clock synchronization and time synchronization network configured according to the present embodiment will be described.
FIG. 3 shows a configuration example of the
The
次に、装置内の各機能の概要を説明する。
先ず、本装置は高精度網同期原振クロック5からの参照クロック信号(一般に、クロックはON/OFFを各一回を一周期とし、例えば64kHzクロック信号の場合、このON/OFFの周期を1秒間に64,000回繰り返す信号のことを言う。ON/OFF周期は常に一定である)を、外部クロック受信機能21で受け、減衰、波形劣化などの影響を除去し波形を整形した後、外部クロック受信機能21の内部に搭載したPLLにより、高精度網同期原振クロック5に同期したクロック信号を安定的に生成する。外部クロック受信機能21は、生成したクロック信号を原振間オフセット検出機能23、主局GPSエミュレーション時計9、クロック同期パケット符号送受信機能12に供給する。尚、外部クロック受信機能21が、高精度網同期原振クロック5の供給する参照クロックに同期する精度は10−12オーダーである。一方、GPS時刻受信機能25は、GPSアンテナ13経由でGPS衛星6からのGPS情報を受信し、時刻情報を抽出し、原振間オフセット検出機能23に対し周期的にGPS時刻情報を供給する。原振間オフセット検出機能23は、外部クロック受信機能21から供給されるクロックのON/OFF周期数をカウントし、外部発振器5由来の時間を計測する。又、原振間オフセット検出機能23は、GPS時刻受信機能25から供給される時刻情報を元に、GPS衛星6由来の時間を計測する。原振間オフセット検出機能23は、上述のように求めた外部発振器5由来の時間及びGPS衛星6由来の時間情報を比較し、原振間の時間の差分を算出し、GPS時刻補正機能10に対し原振間の時間の差分情報(本例では、外部発振器5由来の時間1秒間あたり、GPS衛星6由来の時間1秒間が±何ps等ずれているという情報であるものとする)を供給する。GPS時刻補正機能10は、原振間オフセット検出機能23から供給される原振間の時間の差分情報を元に、装置内において必要な精度を維持可能な様に決定した補正周期で、主局GPSエミュレーション時計9の時刻補正を行う。主局GPSエミュレーション時計9は、外部クロック受信機能21より供給されるクロック信号を元に駆動し、GPS時刻補正機能10、及びIEEE1588マスター機能11に対し時刻情報(何時何分何秒という情報。尚、秒以下の情報については、小数点以下の情報として提供可能であるものとする)を供給するとともに、GPS時刻補正機能10からの時刻補正情報を受け取り、時刻の補正を行う。
Next, an outline of each function in the apparatus will be described.
First, this apparatus uses a reference clock signal from the high-accuracy network synchronization source clock 5 (generally, the clock is turned ON / OFF once for each cycle. For example, in the case of a 64 kHz clock signal, this ON / OFF cycle is set to 1). The signal is repeated 64,000 times per second (the ON / OFF cycle is always constant) by the external
IEEE1588マスター機能11は、設定情報記憶機能28、IEEE1588時刻補正間隔算出機能29、IEEE1588時刻同期メッセージ送受信機能30を備える。設定情報記録機能28は外部監視制御装置20より、IEEE1588の時刻同期に対する要求精度情報を設定され、これを記憶する。IEEE1588時刻補正間隔算出機能29は、設定情報記憶機能28が記憶する要求精度情報を読み出し、自装置内のクロックの同期及び動作精度情報とから、IEEE1588時刻同期メッセージの送出間隔を算出し、IEEE1588時刻同期メッセージ送受信機能30に対しIEEE1588時刻同期メッセージの送出間隔情報を供給する。IEEE1588時刻同期メッセージ送受信機能30は、IEEE1588時刻補正間隔算出機能29から供給されるIEEE1588時刻同期メッセージの送出間隔情報を元に時刻補正メッセージの送出タイミングを決定し、主局GPSエミュレーション時計9から供給されるGPSエミュレーション時刻情報を元に、IEEE1588時刻同期メッセージを生成し、クロック同期パケット符号送受信機能12経由で従局設置のパケット伝送装置2(又は基地局装置4)に対しIEEE1588時刻同期メッセージを送信し、IEEE1588時刻同期プロトコルを起動する。尚、IEEE1588マスター機能11は、IEEE1588に規定されるプロトコルのマスター側としての動作機能を有する。最後にクロック同期パケット符号送受信機能12は、外部クロック受信機能21からのクロック供給を受け、これに同期したタイミングで伝送路符号の送出を行う。又、IEEE1588時刻同期メッセージ送受信機能30から送信要求があったパケット、及び本装置より送信する主信号パケットは全て、クロック同期パケット符号送受信機能12によりSynchronous Ethernet信号として、外部クロック受信機能21より供給されるクロックに同期した伝送路符号で送出される。
The IEEE 1588
図4は、従局設置のパケット伝送装置2の構成例を示したものである。
従局設置のパケット伝送装置2は、主信号クロック抽出機能31、クロック源間オフセット検出機能33とIEEE1588スレーブ機能35とIEEE1588時刻補正機能17と従局IEEE1588エミュレーション時計16を有する自走IEEE1588時計機能15、設定情報記憶機能38とIEEE1588時刻補正間隔算出機能39とIEEE1588時刻同期メッセージ送受信機能40を有するIEEE1588マスター機能18、及びクロック同期パケット符号送受信機能19を備える。主信号クロック抽出機能31、及びIEEE1588スレーブ機能35は主局設置のパケット伝送装置1又は上位の従局設置のパケット伝送装置2と接続し、設定情報記憶機能38は外部制御装置20に接続し、クロック同期パケット符号送受信機能19は、下位の従局設置のパケット伝送装置2又は基地局装置4に接続する。
FIG. 4 shows a configuration example of the
The
次に、装置内の各機能の概要を説明する。
先ず、主信号クロック抽出機能31は、主局設置のパケット伝送装置1又は上位の従局設置のパケット伝送装置2から受信したSynchronous Ethernet信号である主信号の伝送路符号よりクロック成分を抽出し、主信号クロック抽出機能31の内部に搭載したPLLにより、主局設置のパケット伝送装置1又は上位の従局設置のパケット伝送装置2から受信した主信号クロックに同期したクロック信号を安定的に生成する。主信号クロック抽出機能31は、生成したクロック信号をクロック源間オフセット検出機能33、従局IEEE1588エミュレーション時計16、クロック同期パケット符号送受信機能19に供給する。尚、主信号クロック抽出機能31が、主局設置のパケット伝送装置1又は上位の従局設置のパケット伝送装置2から受信した主信号より抽出したクロックに同期する精度は10−12オーダーである。一方、IEEE1588スレーブ機能35は、従局IEEE1588エミュレーション時計16の時刻情報を参照する機能を持ち、主局設置のパケット伝送装置1又は上位の従局設置のパケット伝送装置2から受信した主信号中のIEEE1588時刻同期メッセージを受信し、IEEE1588プロトコルに従い、メッセージ中の時刻情報の抽出、メッセージ送受信時の自装置の時刻情報の記録を行い、主局側が意図する時刻情報の計算を行う(一連の動作、計算の考え方については、図2において説明した通りである)。又、主局側より提供された時刻情報をIEEE1588時刻補正機能17に対して提供するとともに、クロック源間オフセット検出機能33に対し、IEEE1588プロトコルより得られた時刻情報を供給する。クロック源間オフセット検出機能33は、主信号クロック抽出機能31から供給されるクロックのON/OFF周期数をカウントし、主局設置のパケット伝送装置1又は上位の従局設置のパケット伝送装置2から受信した主信号クロック由来の時間を計測する。又、クロック源間オフセット検出機能33は、IEEE1588スレーブ機能35から供給される時刻情報を元に、IEEE1588により配信されるGPS衛星6由来の時間を計測する。クロック源間オフセット検出機能33は、前記により求めた主信号クロック由来の時間情報とIEEE1588由来の時間情報を比較し、クロック源間の時間の差分を検出し、IEEE1588時刻補正機能17に対し時間の差分情報を供給する。IEEE1588時刻補正機能17は、クロック源間オフセット検出機能33から供給されるクロック源間の時間の差分情報と、IEEE1588スレーブ機能35より供給されるIEEE1588プロトコルにより得られるマスター装置側の時刻情報を元に、装置内において必要な精度を維持可能な様に決定した補正周期で、従局IEEE1588エミュレーション時計16の時刻補正を行う。従局IEEE1588エミュレーション時計16は、従局クロック生成機能14より供給されるクロック信号を元に駆動し、IEEE1588時刻補正機能17、及びIEEE1588マスター機能18に対し、IEEE1588プロトコル上の上位装置の時刻、すなわち大元であるGPS時刻をエミュレーションした時刻情報を供給するとともに、IEEE1588時刻補正機能17からの周期的な時刻補正情報を受け取り、時刻の補正を行う。
Next, an outline of each function in the apparatus will be described.
First, the main signal
IEEE1588マスター機能18は、設定情報記憶機能38、IEEE1588時刻補正間隔算出機能39、IEEE1588時刻同期メッセージ送受信機能40を備える。設定情報記録機能38は外部監視制御装置20より、IEEE1588の時刻同期に対する要求精度情報を設定され、これを記憶する。IEEE1588時刻補正間隔算出機能39は、設定情報記憶機能38が記憶する要求精度情報を読み出し、自装置内のクロックの同期及び動作精度情報とから、IEEE1588時刻同期メッセージの送出間隔を算出し、IEEE1588時刻同期メッセージ送受信機能40に対しIEEE1588時刻同期メッセージの送出間隔情報を供給する。IEEE1588時刻同期メッセージ送受信機能40は、IEEE1588時刻補正間隔算出機能39から供給されるIEEE1588時刻同期メッセージの送出間隔情報を元に時刻補正メッセージの送出タイミングを決定し、従局IEEE1588エミュレーション時計16から供給されるIEEE1588経由で配信されるGPSエミュレーション時刻情報を元に、IEEE1588時刻同期メッセージを生成し、クロック同期パケット符号送受信機能19経由で下位の従局設置のパケット伝送装置2、又は基地局装置4に対しIEEE1588時刻同期メッセージを送信し、IEEE1588時刻同期プロトコルを起動する。尚、IEEE1588マスター機能11は、IEEE1588に規定されるプロトコルのマスター側としての動作機能を有する。最後にクロック同期パケット符号送受信機能19は、主信号クロック抽出機能31からのクロック供給を受け、これに同期したタイミングでSynchronous Ethernet信号として、伝送路符号の送出を行う。又、IEEE1588時刻同期メッセージ送受信機能40から送信要求があったパケット、及び本装置より送信する主信号パケットは全て、クロック同期パケット符号送受信機能19により、主信号クロック抽出機能31より供給されるクロックに同期した伝送路符号で送出される。尚、従局設置のパケット伝送装置2においては、IEEE1588のマスター機能、及びスレーブ機能の両方を有しているが、スレーブからマスターへの時刻情報のリレーは行っていない。これにより、自装置のパケットスイッチにより生じる伝送遅延、及び遅延のゆらぎの影響を受けない構成となっている。
The IEEE 1588
尚、図4の実施の形態に示した従局設置のパケット伝送装置2は、IEEE1588のマスター機能とスレーブ機能の両方を有しているが、同期網の末端装置(図1における基地局装置4、又は、末端のパケット伝送装置)においては、マスター側機能を省略し、スレーブ側機能のみを有している装置構成としても良い。
The slave station-installed
図5は、主局設置のパケット伝送装置1の原振間オフセット検出機能23における原振間オフセットの検出の概念を示したタイミングチャートである。
先ず、本図では上段に外部クロック受信機能21より供給される外部クロック受信機能供給クロック41の波形を記述し、下段にGPS衛星6から受信する時刻42の受信タイミングを記述している。又、本図では外部クロック受信機能供給クロック41の1周期分の時間をTs45、GPS衛星6から受信する一つの時刻情報と次に受信する時刻情報との差分の時間をTg46とし、外部クロック受信機能供給クロック41の累積として求められる1秒間と、GPS衛星6から受信する時刻42により供給される1秒間との差分時間をΔT47として表している。本図では、簡単の為、外部クロック受信機能供給クロック41が10Hzであるとし、またGPS衛星6からの時刻受信周期が1秒であるとしている。従って本図の例では、ΔT=10×Ts−Tgとなる。外部クロック受信機能供給クロック41とGPS衛星6から受信する時刻42は、1秒あたりΔTずつ差が開いていく。本図の例においては、ΔT47=−Tsとなっており、外部クロック受信機能供給クロック41を元に生成される1秒間は、GPS衛星6から受信する時刻42による1秒間より、−Ts秒短い。これは、GPS衛星6に搭載されている原子時計と、高精度同期原振クロックを構成する原子時計が独立して存在しており、且つ相互に同期を取っていない為に生じる時間差である。前記の図3の説明中の原振間オフセット検出機能23は、本図(図5)に示す概念により、外部発振器由来の1秒間と、GPS衛星6由来の1秒間の差分を検出し、1秒あたり±何psのずれがあるという形で、GPS時刻補正機能10に対し時間の差分情報を提供する。
FIG. 5 is a timing chart showing the concept of detection of the offset between original oscillations in the offset between original
First, in this figure, the waveform of the external clock reception
尚、本図において説明の為、GPS衛星6より時刻情報を受信した時刻t0 48を起点として、外部クロック受信機能供給クロック41の累積の個数情報43、及び次回のGPS衛星6から時刻情報を受信した時刻t0+1 49を図示している。本図は簡単の為、t0 48において、GPS衛星6より時刻情報を受信するタイミングと外部クロック受信機能供給クロック41の開始点が一致し、且つ次回のGPS衛星6より時刻情報を受信するタイミングと外部クロック受信機能供給クロック41の11番目のクロックの終了点が一致する例を示している。しかし、実際には各クロックの精度は10−8以上の精度であり、且つ各々のタイミングが一致することは少ない。この為、実際の原振間オフセット検出機能23においては、より長い時間観測し、t0 48に相当するGPS衛星6から時刻42を受信するタイミングと外部クロック受信機能供給クロック41の開始点が一致するタイミングを検出した後、次にGPS衛星6から時刻42を受信するタイミングと外部クロック受信機能供給クロック41の終了点が一致するタイミング(t0+1 49に相当)を検出するまで、より長い間観測を行い、累積の時間数で差分時間を除算してΔTを求める方法が考えられる。又、それ以外に原振間オフセット検出機能23の内部に各タイミングを更に細かく等分する分周機能を搭載し、細かく区切ったタイミングを使用して、より早く各タイミングの一致点を検出する方法をとっても良い。
For the sake of explanation in this figure, the accumulated
図6は、本実施の形態の実システムへの適用に際して使用する各種パラメータの一覧、及び計算式の一覧の説明図である。
初期値として与えられるパラメータとしてクロック同期網同期精度50=10−hがあり、外部監視制御装置20から設定情報記憶機能28に対して設定されるパラメータとして要求GPS時刻同期精度52=10−jがあり、原振間オフセット検出機能23が検出するパラメータとして原振間オフセット値(原振間の時間の差分情報)53がある。原振間オフセット値53については、1秒あたりの時間差をピコ秒(10−12秒)で表したものとし、gfedcba[ps]=a×100+b×101+c×102+d×103+e×104+f×105+g×106[ps]という形式での表現も可能である。以上が計算によるパラメータの算出に必要となるパラメータである。一般にクロック同期網同期精度50は、非常に高精度であるが、外部クロック受信機能21が生成するクロックの周波数は、主信号の周波数程度であり、クロック同期網同期精度によりも粗いオーダーになる。例えば、網同期による外部クロック受信機能21のクロック網同期精度は10−12オーダーであるが、主信号の周波数は10Gbit/sec程度、即ち10−10オーダーのクロックにより実現されている。
FIG. 6 is an explanatory diagram of a list of various parameters and a list of calculation formulas used when the present embodiment is applied to a real system.
As a parameter given as an initial value, there is a clock synchronization network synchronization accuracy 50 = 10 −h , and a requested GPS time synchronization accuracy 52 = 10 −j is a parameter set from the
計算値としては、原振間オフセット値の100成分に対する補正タイミング56、原振間オフセット値の101成分に対する補正タイミング57、原振間オフセット値の102成分に対する補正タイミング58、原振間オフセット値の103成分に対する補正タイミング59、原振間オフセット値の104成分に対する補正タイミング60、原振間オフセット値の105成分に対する補正タイミング61、原振間オフセット値の106成分に対する補正タイミング62、原振間オフセット値の100成分に対する補正量63、原振間オフセット値の101成分に対する補正量64、原振間オフセット値の102成分に対する補正量65、原振間オフセット値の103成分に対する補正量66、原振間オフセット値の104成分に対する補正量67、原振間オフセット値の105成分に対する補正量68、原振間オフセット値の106成分に対する補正量69があり、各々の計算式は以下の通りとなっている。 Calculated are the original fumarate correction timing 56 for 10 0 component of the offset value, the original fumarate correction timing 57 for 10 1 component of the offset value, the original fumarate correction timing 58 for 10 2-component offset value, the original fumarate correction timing 61 for 10 5 component of the correction timing 60, the original fumarate offset value for 10 4 component of the correction timing 59, the original fumarate offset value for 10 three components of the offset value, correction for 106 components of the original fumarate offset value timing 62, the original fumarate correction amount 63 for 10 0 component of the offset value, the original fumarate correction amount 64 for 10 1 component of the offset value, the correction amount 65 for 10 2 components of the original fumarate offset value, the original fumarate offset value correction amount 66 with respect to the 10 three components, against the 10 4 components of the original fumarate offset value Correction amount 67, the correction amount 68 for 10 5 components of the original fumarate offset value, there is the correction amount 69 with respect to 106 components of the original fumarate offset values, each of the formulas has become as follows.
原振間オフセット値の100成分に対する補正タイミング56=10−0×10h−j−1
原振間オフセット値の101成分に対する補正タイミング57=10−1×10h−j−1
原振間オフセット値の102成分に対する補正タイミング58=10−2×10h−j−1
原振間オフセット値の103成分に対する補正タイミング59=10−3×10h−j−1
原振間オフセット値の104成分に対する補正タイミング60=10−4×10h−j−1
原振間オフセット値の105成分に対する補正タイミング61=10−5×10h−j−1
原振間オフセット値の106成分に対する補正タイミング62=10−6×10h−j−1
原振間オフセット値の100成分に対する補正量63=a×10−j−1[秒]
原振間オフセット値の101成分に対する補正量64=b×10−j−1[秒]
原振間オフセット値の102成分に対する補正量65=c×10−j−1[秒]
原振間オフセット値の103成分に対する補正量66=d×10−j−1[秒]
原振間オフセット値の104成分に対する補正量67=e×10−j−1[秒]
原振間オフセット値の105成分に対する補正量68=f×10−j−1[秒]
原振間オフセット値の106成分に対する補正量69=g×10−j−1[秒]
Correction for 10 0 component of the original fumarate offset timing 56 = 10 -0 × 10 h- j-1
Correction timing 57 = 10 -1 × for 10 1 component of the original fumarate offset 10 h-j-1
Correction timing 58 for 10 2 components of the offset value between original vibrations 58 = 10 −2 × 10 h−j−1
Correction timing 59 for the 10 3 components of the offset value between the original vibrations 59 = 10 −3 × 10 h−j−1
Correction for 10 4 components of the original fumarate offset timing 60 = 10 -4 × 10 h- j-1
Correction timing 61 for 10 5 components of the original fumarate offset = 10 -5 × 10 h-j -1
Correction timing 62 = 10 -6 × for 106 components of the original fumarate offset 10 h-j-1
Correction amount for 10 0 component of the original fumarate offset value 63 = a × 10 -j-1 [ sec]
Correction amount for 10 1 component of the original fumarate offset 64 = b × 10 -j-1 [ sec]
Correction amount for 10 2 components of the original fumarate offset value 65 = c × 10 -j-1 [ sec]
Correction amount for 10 3 components of the original fumarate offset value 66 = d × 10 -j-1 [ sec]
Correction amount 67 for the 4 components of the offset value between original vibrations = e × 10 −j−1 [seconds]
Correction amount for 105 components of the original fumarate offset value 68 = f × 10 -j-1 [ sec]
Correction amount for 106 components of the original fumarate offset value 69 = g × 10 -j-1 [ sec]
以下に、計算した各パラメータの意味を簡単に説明する。
又、各補正タイミング56〜62、補正量63〜69は、クロック同期網の同期精度オーダーで主局GPSエミュレーション時計9を運用する為にGPS時刻補正機能10が行う時刻補正のタイミングと、各タイミングによる補正量である。要求される同期精度のオーダーよりも一桁高い精度内に収まる様に時刻のずれを補正することにより、外部クロック受信機能供給クロック41により自走する主局GPSエミュレーション時計9をGPS衛星6が提供する時刻に十分な精度で追従させることが可能となる。又、要求される精度より原振間オフセット値の分解能は高い。この為、要求される精度よりも一桁小さい時間成分のオフセットについては、例えば1秒間に一回補正を行う。又、要求される精度以上の時間成分のオフセットについては、桁数に応じてより細かい周期に等分して補正を行う。一方、要求される精度よりも二桁以上小さい時間成分のオフセットについては、桁数に応じてより長い周期で補正を行う。
Hereinafter, the meaning of each calculated parameter will be briefly described.
Further, the correction timings 56 to 62 and the correction amounts 63 to 69 are the timing of the time correction performed by the GPS
尚、主局GPSエミュレーション時計9を駆動する外部クロック受信機能供給クロック41の精度は、GPS時刻同期精度52よりも高い。この為、IEEE1588プロトコルによる時刻補正無しで各エミュレーション時計を駆動してもGPS時刻同期情報52により要求される同期精度を維持可能であり、最長の時間は10h−j−1秒である。これはIEEE1588時刻補正間隔算出機能29において算出を行うものである。
The accuracy of the external clock reception
次に、実際のパラメータを仮定し、計算値を導出した場合の例を示す。
先ず、初期値、設定値、及び測定値を以下の通り仮定する。
クロック同期網同期精度50=10−h=10−12
GPS時刻同期精度52=10−j=10−8
原振間オフセット値53=gfedcba[ps/秒]=a×100+b×101+c×102+d×103+e×104+f×105+g×106=1522[ps/秒]=2×100+2×101+5×102+1×103+0×104+0×105+0×106
全ての基地局がGPS衛星6から時刻情報を受信した場合の時刻同期精度に対する要求は10−8オーダーであり、GPS時刻同期精度52に対する要求も10−8としている。
以上より、各源信間オフセットの成分に対する補正タイミングと補正量は以下の通りとなる。
Next, an example in which a calculated value is derived assuming actual parameters is shown.
First, the initial value, the set value, and the measured value are assumed as follows.
Clock synchronization network synchronization accuracy 50 = 10 −h = 10 −12
GPS time synchronization accuracy 52 = 10 −j = 10 −8
Original oscillation offset value 53 = gfedcba [ps / sec] = a × 10 0 + b × 10 1 + c × 10 2 + d × 10 3 + e × 10 4 + f × 10 5 + g × 10 6 = 1522 [ps / sec] = 2 × 10 0 + 2 × 10 1 + 5 × 10 2 + 1 × 10 3 + 0 × 10 4 + 0 × 10 5 + 0 × 10 6
The request for time synchronization accuracy when all base stations receive time information from the
As described above, the correction timing and correction amount for each source signal offset component are as follows.
100成分
補正タイミング56=10−0×1012−j−1=1012−8−1=103秒周期
補正量63=a×10−j−1=2×10−8−1=2×10−9秒
101成分
補正タイミング57=10−1×1012−j−1=10−1×1012−8−1=102秒周期
補正量64=b×10−j−1=2×10−8−1=2×10−9秒
102成分
補正タイミング58=10−2×1012−j−1=10−2×1012−8−1=10秒周期
補正量65=c×10−j−1=5×10−8−1=5×10−9秒
103成分
補正タイミング59=10−3×1012−j−1=10−3×1012−8−1=1秒周期
補正量66=c×10−j−1=1×10−8−1=1×10−9秒
尚、本例ではその他成分に対する補正量は0であり、補正不要である。
10 0 component correction timing 56 = 10 -0 × 10 12- j-1 = 10 12-8-1 = 10 3 second cycle correction amount 63 = a × 10 -j-1 = 2 × 10 -8-1 = 2 × 10 −9
以上より、GPS時刻補正機能10は、1秒周期で+1×10−9秒の補正を行い、10秒周期で+6×10−9 (=(1+5)×10−9) 秒の補正を行い、100秒周期で+8×10−9 (=(1+5+2)×10−9) 秒の補正を行い、1000秒周期で+10×10−9 (=(1+5+2+2)×10−9) 秒の補正を行う。又、IEEE1588マスター機能は最長1000秒(=103秒)周期でIEEE1588時刻補正メッセージを発行することにより、次段のパケット伝送装置においてもGPS衛星6より受信した時刻の同期を10−8オーダーの精度で維持することが可能となる。通常IEEE1588においては、1秒オーダーの周期で時刻補正を行う必要があるが、本実施の形態によれば、この間隔を1000倍に拡張することが可能となり、ネットワークの負荷を大幅に軽減出来る。
As described above, the GPS
図7はGPS時刻補正機能10における主局GPSエミュレーション時計9に対する時刻補正量を決定する処理フローチャートである。本処理は、主局設置のパケット伝送装置1内のGPS時刻補正機能10における時刻補正量を決定する為の処理フローである。図6に示した様に、原振間オフセットの各成分に応じ、補正タイミング、及び補正量が異なる。この為、周期的に発生する補正タイミングが原振間オフセットの各成分のうち、どの部分に対応するかを判定する判定処理91〜96、各補正周期に対応した補正量決定処理97〜103、時刻補正処理104により構成する。本実施の形態では、最小10−6×1012−j−1周期で補正を行うものとしている。従って、本処理は10−6×1012−j−1周期で起動される。本処理が起動されると、最初に判定処理91で、補正タイミングが原振間オフセット値の106[ps]成分に対するものであるかを判定する。106[ps]成分に対するタイミングである場合には、補正量決定処理98により、時刻補正量をg×10−j−1秒として時刻補正処理104を行い、処理を終了する。106[ps]成分に対するタイミングでなかった場合には、判定処理92で、補正タイミングが原振間オフセット値の105[ps]成分に対応するものであるかを判定する。105[ps]成分に対応するタイミングである場合には、補正量決定処理99により、時刻補正量を(f+g)×10−j−1秒として時刻補正処理104を行い、処理を終了する。105[ps]成分に対するタイミングでなかった場合には、判定処理93で、補正タイミングが原振間オフセット値の104[ps]成分に対応するものであるかを判定する。104[ps]成分に対応するタイミングである場合には、補正量決定処理100により、時刻補正量を(e+f+g)×10−j−1秒として時刻補正処理104を行い、処理を終了する。104[ps]成分に対するタイミングでなかった場合には、判定処理94で、補正タイミングが原振間オフセット値の103[ps]成分に対応するものであるかを判定する。103[ps]成分に対応するタイミングである場合には、補正量決定処理101により、時刻補正量を(d+e+f+g)×10−j−1秒として時刻補正処理104を行い、処理を終了する。103[ps]成分に対するタイミングでなかった場合には、判定処理95で、補正タイミングが原振間オフセット値の102[ps]成分に対応するものであるかを判定する。102[ps]成分に対応するタイミングである場合には、補正量決定処理102により、時刻補正量を(c+d+e+f+g)×10−j−1秒として時刻補正処理104を行い、処理を終了する。102[ps]成分に対するタイミングでなかった場合には、判定処理96で、補正タイミングが原振間オフセット値の101[ps]成分に対応するものであるかを判定する。101[ps]成分に対応するタイミングである場合には、補正量決定処理103により、時刻補正量を(b+c+d+e+f+g)×10−j−1秒として時刻補正処理104を行い、処理を終了する。101[ps]成分に対するタイミングでなかった場合には、補正量決定処理97により、時刻補正量を(a+b+c+d+e+f+g)×10−j−1秒として時刻補正処理104を行い、処理を終了する。
FIG. 7 is a process flowchart for determining a time correction amount for the main station
図8は、GPSエミュレーション時刻のGPS時刻への追従状況の概念図である。
本図においては、横軸を時刻、縦軸を網同期クロック由来の時間としている。又、GPS時刻105と網同期クロックに生成した時刻106、及びGPSエミュレーション時刻107のグラフである。又、本図中にはGPS時刻105を中心として、要求GPS時刻同期精度(=10−j)を実現する上で許容される差分範囲108の部分をGPS時刻105のグラフと並行する直線として図示している。本図より分かる通り、GPSエミュレーション時刻107が、要求GPS時刻同期精度を実現する上で許容される差分範囲108の線を越えないように補正を行っている。
本図の例においては、GPS時刻105の方が網同期クロックにより生成した時刻106のグラフよりも右側にあり、時刻が早く進んでいる。GPSエミュレーション時刻107に対し、図7の説明で記述した処理が、最小補正時間10−6×1012−8−1[秒]109周期で起動し、原振間オフセットのどの成分に対応する周期であるか判定し、各成分に対応する補正量を決定し、時刻補正を行う。本図の例では、10−6成分に対応する補正時刻+g×10−8−1[秒]110を6回、10−5成分に対応する補正時刻+(f+g)×10−8−1[秒]111を2回、10−0成分に対応する補正時刻+(a+b+c+d+e+f+g)×10−8−1[秒]112を1回実行している。以上により、GPSエミュレーション時刻107を要求GPS時刻同期精度(=10−j)を実現する上で許容される差分範囲108内で、GPS時刻105に追従させる。
FIG. 8 is a conceptual diagram of a situation in which the GPS emulation time follows the GPS time.
In this figure, the horizontal axis represents time and the vertical axis represents time derived from the network synchronization clock. Also, the GPS time 105, the time 106 generated in the network synchronization clock, and the GPS emulation time 107 are graphs. Also, in this figure, the portion of the difference range 108 that is allowed to achieve the required GPS time synchronization accuracy (= 10 −j ) with the GPS time 105 as the center is shown as a straight line parallel to the GPS time 105 graph. Show. As can be seen from this figure, the correction is performed so that the GPS emulation time 107 does not exceed the line of the difference range 108 that is allowed to realize the required GPS time synchronization accuracy.
In the example of this figure, the GPS time 105 is on the right side of the graph of the time 106 generated by the network synchronization clock, and the time is advanced earlier. For the GPS emulation time 107, the processing described in the explanation of FIG. 7 is started with a minimum correction time of 10 −6 × 10 12-8-1 [seconds] 109 cycles, and the cycle corresponding to which component of the offset between the original oscillations Is determined, a correction amount corresponding to each component is determined, and time correction is performed. In the example of this figure, the correction time corresponding to 10 −6 component + g × 10 −8-1 [seconds] 110 is corrected six times, and the correction time corresponding to 10 −5 component + (f + g) × 10 −8-1 [ Second] 111 is executed twice, correction time corresponding to 10 −0 component + (a + b + c + d + e + f + g) × 10 −8-1 [second] 112 is executed once. As described above, the GPS emulation time 107 is made to follow the GPS time 105 within the difference range 108 that is allowed for realizing the required GPS time synchronization accuracy (= 10 −j ).
図6、図7、図8では主局設置のパケット伝送装置1における各種パラメータの計算規則、時刻補正量の決定処理フロー、時刻補正処理の実際の動作の説明を行ったが、従局設置のパケット伝送装置2についても同様の考え方で計算を行い、動作する。これにより、本実施の形態におけるクロック同期及び時刻同期網内において、主局よりIEEE1588により配信されるGPS時刻を末端の基地局装置4においても、又基地局装置4と直接GPS衛星6より時刻を受信する基地局装置3においても、システム上必要とされる10−8オーダーの精度で同期することが可能となる。
6, 7, and 8, the calculation rules for various parameters, the time correction amount determination process flow, and the actual operation of the time correction process in the
なお、補正タイミング及び補正量について一般的に示すと次のように表すことができる。
前記差分情報=a0×100+a1×101+・・・+an×10n [10−h]、
クロック同期網同期精度=10−h、
要求される同期精度=10−j、
のとき、
10n[10−h 秒]成分に対する補正タイミングは、10−n×10h−j−1、
補正量は、an×10−j−1、
である。
In general, the correction timing and the correction amount can be expressed as follows.
The difference information = a 0 × 10 0 + a 1 × 10 1 +... + An × 10 n [10 −h ],
Clock synchronization network synchronization accuracy = 10 −h
Required synchronization accuracy = 10 −j
When,
The correction timing for the 10 n [10 −h second] component is 10 −n × 10 h−j−1 ,
Correction amount, a n × 10 -j-1 ,
It is.
本発明は、IEEE1588以外にも、様々な時刻同期プロトコルに適用することができる。また、本発明は、GPS以外の時刻源を用いたシステム、又は、高精度網同期原振クロック5に相当する他の高精度の原振クロックを用いたシステム等に適用することができる。
The present invention can be applied to various time synchronization protocols other than IEEE 1588. Further, the present invention can be applied to a system using a time source other than GPS, or a system using another high-accuracy original clock corresponding to the high-accuracy network synchronous
1 主局設置のパケット伝送装置
2 従局設置のパケット伝送装置
3、4 基地局装置
5 外部クロック
6 GPS衛星
8 自走GPS時計機能
9 主局GPSエミュレーション時計
10 GPS時刻補正機能
11、18 IEEE1588マスター機能
12、19 クロック同期パケット符号送受信機能
13 GPSアンテナ
14 従局クロック生成機能
15 自走IEEE1588時計機能
16 従局IEEE1588エミュレーション時計
17 IEEE1588時刻補正機能
20 外部監視制御装置
21 外部クロック受信機能
23 原振間オフセット検出機能
25 GPS時刻受信機能
28、38 設定情報記憶機能
29、39 IEEE1588時刻補正間隔算出機能
30、40 IEEE1588時刻同期メッセージ送受信機能
31 主信号クロック抽出機能
33 クロック源間オフセット検出機能
35 IEEE1588スレーブ機能
41 外部クロック受信機能供給クロック
42 GPS衛星6から受信する時刻
43 外部クロック受信機能供給クロックのカウント値
45 外部クロック受信機能供給クロックの1周期分時間
46 GPS衛星6からの時刻受信間隔
47 1秒間あたりの外部クロック受信機能供給クロック由来の時間とGPS衛星6由来の時間の差分
48 初回外部クロック受信機能供給クロックおよびGPS衛星6からの時刻情報受信タイミング一致時刻
49 次回外部クロック受信機能供給クロックおよびGPS衛星6からの時刻情報受信タイミング一致時刻
50 クロック同期網同期精度
52 要求GPS時刻同期精度
53 原振間オフセット値
56〜62 原振間オフセット値の各成分に対する補正タイミング
63〜69 原振間オフセット値の各成分に対する補正量
71 Synchronous Ethernet
72 IEEE1588時刻同期メッセージ
73 GPS信号
91〜96 判定処理
97〜103 補正量決定処理
104 時刻補正処理
105 GPS時刻
106 網同期クロックにより生成した時刻
107 GPSエミュレーション時刻
108 要求GPS時刻同期精度(=10−j)を実現する上で許容される差分範囲
109 最小補正時間10−6×1012−8−1[秒]
110 補正時刻 +g×10−j−1[秒]
111 補正時刻 +(f+g)×10−j−1[秒]
112 補正時刻 +(a+b+c+d+e+f+g)×10−j−1[秒]
DESCRIPTION OF SYMBOLS 1 Packet transmission apparatus installed in master station 2 Packet transmission apparatus installed in slave station 3, 4 Base station apparatus 5 External clock 6 GPS satellite 8 Self-propelled GPS clock function 9 Master station GPS emulation clock 10 GPS time correction function 11, 18 IEEE 1588 master function 12, 19 Clock synchronous packet code transmission / reception function 13 GPS antenna 14 Slave station clock generation function 15 Self-propelled IEEE 1588 clock function 16 Slave station IEEE 1588 emulation clock 17 IEEE 1588 time correction function 20 External monitoring control device 21 External clock reception function 23 Source offset detection function 25 GPS time reception function 28, 38 Setting information storage function 29, 39 IEEE 1588 time correction interval calculation function 30, 40 IEEE 1588 time synchronization message transmission / reception function 31 Main signal clock Clock extraction function 33 Clock source offset detection function 35 IEEE 1588 slave function 41 External clock reception function supply clock 42 Time received from GPS satellite 6 43 External clock reception function supply clock count value 45 External clock reception function supply clock cycle Minute time 46 Time reception interval from GPS satellite 6 47 Difference between time derived from external clock receiving function supply clock and time derived from GPS satellite 6 per second 48 Time information from initial external clock receiving function supply clock and GPS satellite 6 Reception timing coincidence time 49 Next time clock receiving function supply clock and time information reception timing coincidence time from GPS satellite 6 50 Clock synchronization network synchronization accuracy 52 Required GPS time synchronization accuracy 53 Original oscillation offset value 56 to 62 Original oscillation interval Correction amount 71 Synchronous Ethernet for each component of the correction timing 63 to 69 original fumarate offset value for each component of the offset value
72 IEEE 1588
110 Correction time + g × 10 −j−1 [second]
111 correction time + (f + g) × 10 −j−1 [second]
112 Correction time + (a + b + c + d + e + f + g) × 10 −j−1 [second]
Claims (11)
前記時刻同期網の最上位の通信装置は、
時刻源となる時計から時刻情報を受信する時刻受信機能と、
前記時刻源となる時計と非同期で前記時刻源より高精度な外部発振器からの外部参照クロック信号を受信し、該外部参照クロック信号に同期するクロック信号を生成する外部クロック受信機能と、
前記外部クロック受信機能が生成したクロック信号周期の計数を元に、外部発振器由来の時間を算出し、前記時刻源となる時計から受信した時刻を元に前記時刻源由来の時間を算出し、前記外部発振器由来の時間と前記時刻源由来の時間との比較から、前記時刻源による原振と前記外部発振器による原振の二つの原振間の時間の差分情報を検出する原振間オフセット検出機能と、
前記外部クロック受信機能が生成したクロック信号を元に駆動するとともに、前記原振間オフセット検出機能により検出された時間の差分情報に基づき時刻を補正することにより、前記時刻同期プロトコルによる時刻同期より高精度で前記時刻源となる時計に同期する主局エミュレーション時計と、
前記主局エミュレーション時計からの時刻情報を元に、前記時刻同期プロトコルに従い時刻同期メッセージを生成するマスター機能と、
前記時刻同期メッセージを、前記外部クロック受信機能より供給されるクロック信号に同期するタイミングで生成される伝送符号により、下位の通信装置へ送出する機能と
を備え、
前記時刻同期網の最上位以外の通信装置は、
前記時刻同期メッセージを上位の通信装置から受信し、
前記上位の通信装置と接続された伝送路の信号の伝送符号よりクロック成分を抽出し、最上位の通信装置のクロックに前記時刻源より高精度に同期するクロック信号を生成する主信号クロック抽出機能と、
前記時刻同期プロトコルにより配信された時刻同期メッセージから時刻情報を抽出する前記時刻同期プロトコルにおけるスレーブ機能と、
前記主信号クロック抽出機能が生成したクロック信号周期の計数を元に、主信号クロック由来の時間を算出し、前記スレーブ機能が受信した時刻より時刻同期プロトコル由来の時間を算出し、前記主信号クロック由来の時間と前記時刻同期プロトコル由来の時間との比較から、二つのクロック源間の時間の差分情報を検出するクロック源間オフセット検出機能と、
前記主信号クロック抽出機能により生成したクロック信号を元に駆動するとともに、前記クロック源間オフセット検出機能により検出された時間の差分情報に基づき時刻を補正することにより、前記時刻同期プロトコルより高精度で前記スレーブ機能の時刻、前記主局エミュレーション時計の時刻、及び前記時刻源となる時計の時刻に同期する従局エミュレーション時計と、
を備えた
前記時刻同期網。
In a time synchronization network for performing time synchronization among a plurality of the communication devices according to time information distributed over the network by a time synchronization protocol, the plurality of communication devices have a hierarchical structure,
The highest level communication device of the time synchronization network is:
And the time reception function of receiving the time information from the clock to the time Kokugen,
An external clock reception function that receives an external reference clock signal from an external oscillator that is asynchronous with the time source clock and is more accurate than the time source, and generates a clock signal that is synchronized with the external reference clock signal;
Based on the clock signal cycle count generated by the external clock reception function, to calculate the time derived from the external oscillator, to calculate the time from the time source based on the time received from the time source clock, By comparing the time from the external oscillator and the time from the time source, the offset detection function between the original oscillators detects time difference information between the original oscillator by the time source and the original oscillator by the external oscillator. When,
Driving based on the clock signal generated by the external clock reception function and correcting the time based on the time difference information detected by the offset detection function between original oscillations, it is possible to achieve higher time synchronization than the time synchronization protocol. A master station emulation clock that is synchronized with the time source clock with accuracy;
Based on the time information from the main station emulation clock, a master function to generate a time synchronization message according to the time synchronization protocol;
A function of sending the time synchronization message to a lower-level communication device by a transmission code generated at a timing synchronized with a clock signal supplied from the external clock reception function;
A communication device other than the highest level of the time synchronization network is:
Receiving the time synchronization message from a higher-level communication device;
A main signal clock extraction function that extracts a clock component from a transmission code of a signal on a transmission line connected to the higher-level communication device, and generates a clock signal synchronized with the clock of the highest-level communication device with high accuracy from the time source When,
A slave function in the time synchronization protocol for extracting time information from a time synchronization message distributed by the time synchronization protocol;
Based on the count of the clock signal period generated by the main signal clock extraction function, the time derived from the main signal clock is calculated, the time derived from the time synchronization protocol is calculated from the time received by the slave function, and the main signal clock From the comparison between the time derived from the time and the time derived from the time synchronization protocol, an offset detection function between clock sources that detects time difference information between two clock sources,
Driving based on the clock signal generated by the main signal clock extraction function and correcting the time based on the difference information of the time detected by the offset detection function between clock sources, it is more accurate than the time synchronization protocol. A slave emulation clock synchronized with the time of the slave function, the time of the master station emulation clock, and the time of the clock as the time source;
The time synchronization network comprising:
時刻源となる時計から時刻情報を受信する時刻受信機能と、
前記時刻源となる時計と非同期で前記時刻源より高精度な外部発振器からの外部参照クロック信号を受信し、該外部参照クロック信号に同期するクロック信号を生成する外部クロック受信機能と、
前記外部クロック受信機能が生成したクロック信号周期の計数を元に、外部発振器由来の時間を算出し、前記時刻源となる時計から受信した時刻を元に前記時刻源由来の時間を算出し、前記外部発振器由来の時間と前記時刻源由来の時間との比較から、前記時刻源による原振と前記外部発振器による原振の二つの原振間の時間の差分情報を検出する原振間オフセット検出機能と、
前記外部クロック受信機能が生成したクロック信号を元に駆動するとともに、前記原振間オフセット検出機能により検出された時間の差分情報に基づき時刻を補正することにより、前記時刻同期プロトコルによる時刻同期より高精度で前記時刻源となる時計に同期する主局エミュレーション時計と、
前記主局エミュレーション時計からの時刻情報を元に、前記時刻同期プロトコルに従い時刻同期メッセージを生成するマスター機能と、
前記時刻同期メッセージを、前記外部クロック受信機能より供給されるクロック信号に同期するタイミングで生成される伝送符号により、下位の通信装置へ送出する機能と
を備えた前記通信装置。
A plurality of communication devices has a hierarchical structure, and is a top-level communication device in a time synchronization network for performing time synchronization between the plurality of communication devices based on time information distributed via a network by a time synchronization protocol,
And the time reception function of receiving the time information from the clock to the time Kokugen,
An external clock reception function that receives an external reference clock signal from an external oscillator that is asynchronous with the time source clock and is more accurate than the time source, and generates a clock signal that is synchronized with the external reference clock signal;
Based on the clock signal cycle count generated by the external clock reception function, to calculate the time derived from the external oscillator, to calculate the time from the time source based on the time received from the time source clock, By comparing the time from the external oscillator and the time from the time source, the offset detection function between the original oscillators detects time difference information between the original oscillator by the time source and the original oscillator by the external oscillator. When,
Driving based on the clock signal generated by the external clock reception function and correcting the time based on the time difference information detected by the offset detection function between original oscillations, it is possible to achieve higher time synchronization than the time synchronization protocol. A master station emulation clock that is synchronized with the time source clock with accuracy;
Based on the time information from the main station emulation clock, a master function to generate a time synchronization message according to the time synchronization protocol;
The communication apparatus comprising: a function of transmitting the time synchronization message to a lower communication apparatus by a transmission code generated at a timing synchronized with a clock signal supplied from the external clock reception function.
上位の通信装置のエミュレーション時計からの時刻情報を元に時刻同期プロトコルに従い生成され、且つ、時刻源より高精度な外部発振器からの外部参照クロック信号と同期するタイミングで生成される伝送符号により送出された時刻同期メッセージを上位の通信装置から受信し、
前記上位の通信装置と接続された伝送路の信号の伝送符号よりクロック成分を抽出し、最上位の通信装置のクロックに前記時刻源より高精度に同期するクロック信号を生成する主信号クロック抽出機能と、
前記時刻同期プロトコルにより配信された時刻同期メッセージから時刻情報を抽出する前記時刻同期プロトコルにおけるスレーブ機能と、
前記主信号クロック抽出機能が生成したクロック信号周期の計数を元に、主信号クロック由来の時間を算出し、前記スレーブ機能が受信した時刻より時刻同期プロトコル由来の時間を算出し、前記主信号クロック由来の時間と前記時刻同期プロトコル由来の時間との比較から、二つのクロック源間の時間の差分情報を検出するクロック源間オフセット検出機能と、
前記主信号クロック抽出機能により生成したクロック信号を元に駆動するとともに、前記クロック源間オフセット検出機能により検出された時間の差分情報に基づき時刻を補正することにより、前記時刻同期プロトコルより高精度で前記スレーブ機能の時刻、前記主局エミュレーション時計の時刻、及び前記時刻源となる時計の時刻に同期する従局エミュレーション時計と、
を備えた前記通信装置。
A communication device other than the highest level in a time synchronization network for performing time synchronization between a plurality of communication devices based on time information distributed via a network by a time synchronization protocol, wherein the plurality of communication devices have a hierarchical structure. ,
Generated according to the time synchronization protocol based on the time information from the emulation clock of the higher-level communication device, and sent out by the transmission code generated at the timing synchronized with the external reference clock signal from the external oscillator with higher accuracy than the time source Received a time synchronization message from a higher-level communication device,
A main signal clock extraction function that extracts a clock component from a transmission code of a signal on a transmission line connected to the higher-level communication device, and generates a clock signal synchronized with the clock of the highest-level communication device with high accuracy from the time source When,
A slave function in the time synchronization protocol for extracting time information from a time synchronization message distributed by the time synchronization protocol;
Based on the count of the clock signal period generated by the main signal clock extraction function, the time derived from the main signal clock is calculated, the time derived from the time synchronization protocol is calculated from the time received by the slave function, and the main signal clock From the comparison between the time derived from the time and the time derived from the time synchronization protocol, an offset detection function between clock sources that detects time difference information between two clock sources,
Driving based on the clock signal generated by the main signal clock extraction function and correcting the time based on the difference information of the time detected by the offset detection function between clock sources, it is more accurate than the time synchronization protocol. A slave emulation clock synchronized with the time of the slave function, the time of the master station emulation clock, and the time of the clock as the time source;
The communication apparatus comprising:
上位の通信装置からの前記時刻同期プロトコルのメッセージを終端するとともに、前記従局エミュレーション時計からの時刻情報を元に、前記時刻同期プロトコルに従い時刻同期メッセージを生成するマスター機能と、
前記時刻同期メッセージを前記主信号クロック抽出部より供給されるクロック信号に同期したタイミングで生成される伝送符号により、下位の通信装置へ送出する機能と、
を備えたことを特徴とする、請求項1に記載された時刻同期網、又は、請求項3に記載された通信装置。
The communication device other than the top is further,
A master function that terminates the message of the time synchronization protocol from a higher-level communication device and generates a time synchronization message according to the time synchronization protocol based on time information from the slave emulation clock,
A function of sending the time synchronization message to a lower communication device by a transmission code generated at a timing synchronized with a clock signal supplied from the main signal clock extraction unit;
The time synchronization network according to claim 1 or the communication device according to claim 3, wherein:
をさらに備え、
前記時刻同期プロトコルによりネットワーク経由で配信される時刻情報により複数の前記通信装置及びひとつ又は複数の基地局間において時刻同期を行うことを特徴とする、請求項1に記載された時刻同期網。
One or more base stations connected to a lower communication device and receiving the time synchronization message,
2. The time synchronization network according to claim 1, wherein time synchronization is performed between the plurality of communication apparatuses and one or a plurality of base stations based on time information distributed via the network according to the time synchronization protocol.
前記主局エミュレーション時計は、前記主局時刻補正機能により導出された前記補正タイミング及び補正量で時刻を補正することを特徴とする、請求項1に記載された時刻同期網、又は、請求項2に記載された通信装置。
Satisfy the required time synchronization accuracy from the difference information of the time between the original oscillations detected by the offset detection function between the original oscillations according to the clock synchronization network synchronization accuracy by the external clock from the external oscillator and the required synchronization accuracy A main station time correction function for deriving the correction timing and correction amount according to the time synchronization protocol required to
The time synchronization network according to claim 1, wherein the main station emulation clock corrects the time with the correction timing and correction amount derived by the main station time correction function. The communication device described in 1.
前記従局エミュレーション時計は、前記従局時刻補正機能により導出された前記補正タイミング及び補正量で時刻を補正することを特徴とする、請求項1に記載された時刻同期網、又は、請求項3に記載された通信装置。
According to the clock synchronization network synchronization accuracy by the external clock from the external oscillator and the required synchronization accuracy, the required time synchronization accuracy is obtained from the time difference information between the two clock sources detected by the clock source offset detection function. A slave time correction function for deriving the correction timing and correction amount according to the time synchronization protocol required to satisfy
The time synchronization network according to claim 1, wherein the slave station emulation clock corrects the time with the correction timing and the correction amount derived by the slave time correction function. Communication device.
クロック同期網同期精度=10−h、
要求される同期精度=10−j、のとき、
10n [10−h 秒]成分に対する補正タイミングは、10−n×10h−j−1、
補正量は、an×10−j−1であることを特徴とする、請求項1に記載された時刻同期網、又は、請求項2若しくは3に記載された通信装置。
The difference information = a 0 × 10 0 + a 1 × 10 1 +... + An × 10 n [10 −h ],
Clock synchronization network synchronization accuracy = 10 −h
When the required synchronization accuracy = 10 −j ,
The correction timing for the 10 n [10 −h second] component is 10 −n × 10 h−j−1 ,
Correction amount, characterized in that it is a a n × 10 -j-1, time synchronization network according to claim 1, or, communication apparatus according to claim 2 or 3.
The time synchronization network according to claim 1, wherein the time source is included in a GPS satellite having a time distribution function, and time information is periodically supplied by a GPS signal. Or the communication apparatus described in 3.
The time synchronization protocol has means for transmitting time information from the master side to the slave side and measuring the propagation delay time between the master and slave, and taking into account the correction amount based on the measured propagation delay time. The time synchronization network according to claim 1 or the communication apparatus according to claim 2 or 3, wherein synchronization is performed.
与えられたクロック網の段数情報及び/又は網同期クロックの同期精度要求情報から、基地局間で要求される時刻同期精度を満足する為に必要となる前記時刻同期プロトコルによる時刻補正間隔の導出手段を具備し、
前記時刻補正間隔の導出手段により決定した時刻補正間隔で前記時刻同期プロトコルによる時刻同期メッセージを発行することにより、通常前記時刻同期プロトコルで規定される時刻補正間隔よりも長い周期で時刻補正を行うことを特徴とする、請求項1に記載された時刻同期網、又は、請求項2若しくは3に記載された通信装置。
The communication device
Means for deriving a time correction interval according to the time synchronization protocol required to satisfy the time synchronization accuracy required between the base stations, from the given clock network stage number information and / or network synchronization clock synchronization accuracy request information Comprising
By issuing a time synchronization message according to the time synchronization protocol at a time correction interval determined by the time correction interval deriving means, the time correction is performed at a cycle longer than the time correction interval normally defined by the time synchronization protocol. 4. The time synchronization network according to claim 1, or the communication device according to claim 2 or 3.
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2009126665A JP5260408B2 (en) | 2009-05-26 | 2009-05-26 | Time synchronization network and communication device |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2009126665A JP5260408B2 (en) | 2009-05-26 | 2009-05-26 | Time synchronization network and communication device |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2010278546A JP2010278546A (en) | 2010-12-09 |
| JP5260408B2 true JP5260408B2 (en) | 2013-08-14 |
Family
ID=43425131
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2009126665A Expired - Fee Related JP5260408B2 (en) | 2009-05-26 | 2009-05-26 | Time synchronization network and communication device |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP5260408B2 (en) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US10405287B1 (en) * | 2016-07-27 | 2019-09-03 | Robotic Research, Llc | Covert timing synchronization |
Families Citing this family (13)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP5576747B2 (en) | 2010-09-06 | 2014-08-20 | 株式会社日立製作所 | Communication system and time synchronization method |
| JP5712756B2 (en) * | 2011-04-14 | 2015-05-07 | 横河電機株式会社 | Wireless network system |
| AT512743A1 (en) * | 2012-04-11 | 2013-10-15 | Fts Computertechnik Gmbh | Method and master clock for creating fail-silent synchronization messages |
| CN103517400B (en) * | 2012-06-26 | 2017-04-05 | 京信通信系统(广州)有限公司 | Femto base station SON processes UE cut-in method and device |
| WO2014016993A1 (en) | 2012-07-27 | 2014-01-30 | 日本電気株式会社 | Communication apparatus, time synchronization system, and time synchronization method |
| JP6049535B2 (en) * | 2013-05-15 | 2016-12-21 | 三菱電機株式会社 | Wireless communication system |
| CN104981742B (en) | 2013-06-12 | 2017-09-19 | 富士电机株式会社 | Dispensing device, dissemination system and distribution method |
| JP6384697B2 (en) * | 2014-05-30 | 2018-09-05 | 華為技術有限公司Huawei Technologies Co.,Ltd. | Synchronization method, synchronization device, and base station |
| JP2016100705A (en) * | 2014-11-20 | 2016-05-30 | セイコーエプソン株式会社 | Time synchronization system |
| CN106413075B (en) * | 2015-08-03 | 2020-04-28 | 中兴通讯股份有限公司 | Method and system for clock synchronization and end station |
| JP6326474B2 (en) * | 2016-10-24 | 2018-05-16 | 株式会社日立製作所 | Communication control device |
| KR102181604B1 (en) * | 2019-03-12 | 2020-11-24 | 한국전력공사 | Apparatus for synchronizing time based on global navigation satellite system and method thereof |
| CN115459897B (en) * | 2022-09-02 | 2024-06-04 | 南方电网科学研究院有限责任公司 | Step length synchronous calibration method and device in power real-time simulation and related equipment |
Family Cites Families (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH10285140A (en) * | 1997-04-02 | 1998-10-23 | Mitsubishi Electric Corp | Time synchronizing system and time synchronizing method therefor |
| WO2008093600A1 (en) * | 2007-01-29 | 2008-08-07 | Nec Corporation | Time synchronization system, time synchronization method, and program |
| US8687481B2 (en) * | 2007-04-04 | 2014-04-01 | Mitsubishi Electric Corporation | Communication system, management apparatus, communication apparatus and computer program |
| WO2008142815A1 (en) * | 2007-05-21 | 2008-11-27 | Nihon University | Synchronous communication system |
| JP5122890B2 (en) * | 2007-09-06 | 2013-01-16 | 株式会社日立製作所 | Communication system and apparatus |
-
2009
- 2009-05-26 JP JP2009126665A patent/JP5260408B2/en not_active Expired - Fee Related
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US10405287B1 (en) * | 2016-07-27 | 2019-09-03 | Robotic Research, Llc | Covert timing synchronization |
Also Published As
| Publication number | Publication date |
|---|---|
| JP2010278546A (en) | 2010-12-09 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5260408B2 (en) | Time synchronization network and communication device | |
| US8116405B2 (en) | Method and apparatus for time synchronization using GPS information in communication system | |
| JP4987346B2 (en) | System and method for time synchronization over a network | |
| KR100895175B1 (en) | Method and apparatus for synchronizing time in a communication system using gps information | |
| EP2928109B1 (en) | Synchronization apparatus, synchronization system, wireless communication apparatus and synchronization method | |
| EP1427121B1 (en) | Radio access network, radio communication method, synchronous server and node | |
| KR100735230B1 (en) | Time synchronization in distributed system | |
| EP2382829B1 (en) | Method of synchronisation within a base station system | |
| EP3531610B1 (en) | Frequency synchronization method and slave clock | |
| CN105027489B (en) | Precision clock protocol synchronization method and node | |
| KR20090032306A (en) | Time synchronization system and method on the network | |
| WO2012165115A1 (en) | Synchronization device and synchronization method | |
| CN101807988A (en) | From the device, from the device time synchronization method, main device and electronic apparatus system | |
| JP5556412B2 (en) | Timing synchronization apparatus and timing synchronization method | |
| CN103368721A (en) | Computing method for transparent clock in time-triggered Ethernet | |
| CN1946002B (en) | Clock synchronizing method between base stations | |
| CN101795190B (en) | Method and arrangement for adjustment of a clock signal | |
| JP5650072B2 (en) | Frequency / time synchronization method and frequency / time synchronization apparatus | |
| JP2011023788A (en) | Network synchronization method and synchronization circuit | |
| JP2018088646A (en) | Time synchronization device and time synchronization method | |
| JP7307585B2 (en) | Time synchronization measurement system | |
| JP5913067B2 (en) | Time synchronization system, transmission path delay time correction method, time synchronization device | |
| KR20160024782A (en) | network synchronization apparatus and method on passive optical access network | |
| KR20100048124A (en) | Time synchronization method in bridged local area network | |
| JP5534548B2 (en) | Receiving side node for clock synchronization, method and program thereof |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20110819 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20121115 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20121127 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20130122 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20130423 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20130425 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20160502 Year of fee payment: 3 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 5260408 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| LAPS | Cancellation because of no payment of annual fees |