JP5259701B2 - フェムト基地局ロケーションを決定するための方法および装置 - Google Patents
フェムト基地局ロケーションを決定するための方法および装置 Download PDFInfo
- Publication number
- JP5259701B2 JP5259701B2 JP2010510495A JP2010510495A JP5259701B2 JP 5259701 B2 JP5259701 B2 JP 5259701B2 JP 2010510495 A JP2010510495 A JP 2010510495A JP 2010510495 A JP2010510495 A JP 2010510495A JP 5259701 B2 JP5259701 B2 JP 5259701B2
- Authority
- JP
- Japan
- Prior art keywords
- base station
- location
- relocatable
- mobile station
- estimating
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
Images





Classifications
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04W—WIRELESS COMMUNICATION NETWORKS
- H04W64/00—Locating users or terminals or network equipment for network management purposes, e.g. mobility management
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04W—WIRELESS COMMUNICATION NETWORKS
- H04W64/00—Locating users or terminals or network equipment for network management purposes, e.g. mobility management
- H04W64/003—Locating users or terminals or network equipment for network management purposes, e.g. mobility management locating network equipment
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04W—WIRELESS COMMUNICATION NETWORKS
- H04W16/00—Network planning, e.g. coverage or traffic planning tools; Network deployment, e.g. resource partitioning or cells structures
- H04W16/18—Network planning tools
- H04W16/20—Network planning tools for indoor coverage or short range network deployment
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04W—WIRELESS COMMUNICATION NETWORKS
- H04W16/00—Network planning, e.g. coverage or traffic planning tools; Network deployment, e.g. resource partitioning or cells structures
- H04W16/24—Cell structures
- H04W16/26—Cell enhancers or enhancement, e.g. for tunnels, building shadow
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04W—WIRELESS COMMUNICATION NETWORKS
- H04W24/00—Supervisory, monitoring or testing arrangements
- H04W24/02—Arrangements for optimising operational condition
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04W—WIRELESS COMMUNICATION NETWORKS
- H04W84/00—Network topologies
- H04W84/02—Hierarchically pre-organised networks, e.g. paging networks, cellular networks, WLAN [Wireless Local Area Network] or WLL [Wireless Local Loop]
- H04W84/04—Large scale networks; Deep hierarchical networks
- H04W84/042—Public Land Mobile systems, e.g. cellular systems
- H04W84/045—Public Land Mobile systems, e.g. cellular systems using private Base Stations, e.g. femto Base Stations, home Node B
Description
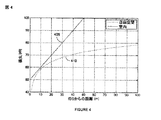
LOSS[dB]=50+1dB*R[meters] (1)
の室内伝搬損失モデルを示し、ここでRは、送信デバイスと受信デバイスとの間の距離である。曲線410は、自由空間モデルを示す。
以下、本願の出願時の発明を付記する。
(1)
有線ネットワーク上で再配置可能とされ、移動局とワイヤレスに通信するように構成された基地局と通信することと、
前記移動局の位置を示す情報を得ることと、
前記得られた位置情報に基づいて前記再配置可能な基地局の位置を推定することと
を備え、前記移動局は、前記再配置可能な基地局とワイヤレスに通信するように構成されている方法。
(2)
前記移動局と前記再配置可能な基地局との間の伝搬損失を決定することと、
前記伝搬損失に基づいて前記再配置可能な基地局の前記位置を推定することと、
をさらに備える(1)の方法。
(3)
前記得られた位置情報は、衛星ベースの測位システムと、ワイヤレスネットワークの測位システムとのうちの1つまたはそれ以上に基づいて推定された位置を備える、請求項(1)の方法。
(4)
前記得られた位置情報は、前記移動局についての複数の位置と、精度低下率推定値と、をさらに備え、前記の複数の位置と、精度低下率推定値とは、異なる時刻に得られており、前記方法は、前記の複数の位置と、精度低下率推定値とに基づいて前記再配置可能な基地局の前記位置を推定すること、をさらに備える(3)の方法。
(5)
前記得られた位置情報は、前記移動局がパイロット信号を受信する、第1のワイヤレスネットワークの1つまたは複数の基地局を識別する情報を備え、前記方法は、
前記1つまたは複数の基地局の位置に関連する位置情報を得ることと、
前記1つまたは複数の基地局の前記位置に基づいて前記再配置可能な基地局の前記位置を推定することと、
をさらに備える(1)の方法。
(6)
前記移動局がパイロット信号を受信する前記1つまたは複数の基地局のうちの少なくとも1つは、別の再配置可能な基地局である、(5)の方法。
(7)
前記1つまたは複数の基地局は、第2のワイヤレスネットワークの中で動作する少なくとも1つの基地局を備え、前記第2のワイヤレスネットワークは、前記第1のワイヤレスネットワークとは異なるワイヤレスネットワークである、(5)の方法。
(8)
前記得られた位置情報は、前記移動局がパイロット信号を受信する、前記第1のワイヤレスネットワークの2つ以上の基地局を識別する情報を備え、前記方法は、
前記2つの基地局についてのカバレージのエリアを決定することと、
さらにカバレージの前記エリアに基づいて前記再配置可能な基地局の前記位置を推定することと、
をさらに備える(5)の方法。
(9)
前記移動局に対して位置決定コマンドを発行することと、
前記位置決定コマンドを発行することに続いて前記位置情報を得ることと、
をさらに備える(1)の方法。
(10)
前記再配置可能な基地局は、さらに、限られた数の移動局に対してサービスを提供するように構成されている、(1)の方法。
(11)
有線ネットワーク上で再配置可能とされ、移動局とワイヤレスに通信するように構成された基地局と通信するように構成されたレシーバと、
前記レシーバに結合され、そして前記移動局の位置を示す情報を得るように構成されたプロセッサと、
前記プロセッサに結合され、前記得られた位置情報に基づいて前記再配置可能な基地局の位置を推定するように構成された位置推定モジュールと
を備え、前記移動局は、前記再配置可能な基地局とワイヤレスに通信するように構成されているネットワークコントローラ。
(12)
前記移動局と前記再配置可能な基地局との間の伝搬損失を決定するように構成された受信信号強度インジケータモジュール、をさらに備え、前記位置推定モジュールは、さらに、前記伝搬損失に基づいて前記再配置可能な基地局の前記位置を推定するように構成されている、(11)のネットワークコントローラ。
(13)
前記得られた位置情報は、衛星ベースの測位システムと、ワイヤレスネットワークの測位システムとのうちの1つまたはそれ以上に基づいて推定された位置を備える、(11)のネットワークコントローラ。
(14)
前記得られた位置情報は、前記移動局についての複数の位置と、精度低下率推定値と、をさらに備え、前記の複数の位置と、精度低下率推定値とは、異なる時刻に得られており、前記位置推定モジュールは、さらに、前記の複数の位置と、精度低下率推定値とに基づいて前記再配置可能な基地局の前記位置を推定するように構成されている、(13)のネットワークコントローラ。
(15)
前記得られた位置情報は、前記移動局がパイロット信号を受信する、第1のワイヤレスネットワークの1つまたは複数の基地局を識別する情報を備え、前記プロセッサは、さらに、前記1つまたは複数の基地局の位置に関連する位置情報を得るように構成されており、そして前記位置推定モジュールは、さらに、前記1つまたは複数の基地局の前記位置に基づいて前記再配置可能な基地局の前記位置を推定するように構成されている、(11)のネットワークコントローラ。
(16)
前記移動局がパイロット信号を受信する前記1つまたは複数の基地局のうちの少なくとも1つは、別の再配置可能な基地局である、(15)のネットワークコントローラ。
(17)
前記1つまたは複数の基地局は、第2のワイヤレスネットワークの中で動作する少なくとも1つの基地局を備え、前記第2のワイヤレスネットワークは、前記第1のワイヤレスネットワークとは異なるワイヤレスネットワークである、(15)のネットワークコントローラ。
(18)
前記得られた位置情報は、前記移動局がパイロット信号を受信する、前記第1のワイヤレスネットワークの2つ以上の基地局を識別する情報を備え、前記位置推定モジュールは、さらに、前記2つの基地局についてのカバレージのエリアを決定するように、そしてさらにカバレージの前記エリアに基づいて前記再配置可能な基地局の前記位置を推定するように、構成されている、(15)のネットワークコントローラ。
(19)
前記移動局に対して位置決定コマンドを発行するように構成されたトランスミッタをさらに備え、前記プロセッサは、さらに、前記位置決定コマンドを発行することに続いて前記位置情報を得るように構成されている、(11)のネットワークコントローラ。
(20)
前記再配置可能な基地局は、さらに、限られた数の移動局に対してサービスを提供するように構成されている、(11)のネットワークコントローラ。
(21)
有線ネットワーク上で再配置可能とされ、移動局とワイヤレスに通信するように構成された基地局と通信するための手段と、
前記移動局の位置を示す情報を得るための手段と、
前記得られた位置情報に基づいて前記再配置可能な基地局の位置を推定するための手段と
を備え、前記移動局は、前記再配置可能な基地局とワイヤレスに通信するように構成されているネットワークコントローラ。
(22)
前記移動局と前記再配置可能な基地局との間の伝搬損失を決定するための手段、をさらに備え、推定するための前記手段は、前記伝搬損失に基づいて前記再配置可能な基地局の前記位置を推定する、(21)のネットワークコントローラ。
(23)
前記得られた位置情報は、前記移動局がパイロット信号を受信する、第1のワイヤレスネットワークの1つまたは複数の基地局を識別する情報を備え、得るための前記手段は、前記1つまたは複数の基地局の位置に関連する位置情報を得ており、推定するための前記手段は、前記1つまたは複数の基地局の前記位置に基づいて前記再配置可能な基地局の前記位置を推定する、(21)のネットワークコントローラ。
(24)
前記得られた位置情報は、前記移動局がパイロット信号を受信する、前記第1のワイヤレスネットワークの2つ以上の基地局を識別する情報を備え、推定するための前記手段は、前記2つの基地局についてのカバレージのエリアを決定し、そしてさらにカバレージの前記エリアに基づいて前記再配置可能な基地局の前記位置を推定する、(23)のネットワークコントローラ。
(25)
方法を実行するためのコンピュータ実行可能命令を用いて符号化されたコンピュータ可読媒体であって、前記方法は、
有線ネットワーク上で再配置可能とされ、移動局とワイヤレスに通信するように構成された基地局と通信することと、
前記移動局の位置を示す情報を得ることと、
前記得られた位置情報に基づいて前記再配置可能な基地局の位置を推定することと
を備え、前記移動局は、前記再配置可能な基地局とワイヤレスに通信するように構成されている、コンピュータ可読媒体。
(26)
前記移動局と前記再配置可能な基地局との間の伝搬損失を決定することと、
前記伝搬損失に基づいて前記再配置可能な基地局の前記位置を推定することと、
のための命令をさらに備える(25)のコンピュータ可読媒体。
(27)
前記得られた位置情報は、前記移動局がパイロット信号を受信する、第1のワイヤレスネットワークの1つまたは複数の基地局を識別する情報を備え、前記コンピュータ可読媒体は、
前記1つまたは複数の基地局の位置に関連する位置情報を得ることと、
前記1つまたは複数の基地局の前記位置に基づいて前記再配置可能な基地局の前記位置を推定することと、
のための命令をさらに備える(25)のコンピュータ可読媒体。
(28)
前記得られた位置情報は、前記移動局がパイロット信号を受信する、前記第1のワイヤレスネットワークの2つ以上の基地局を識別する情報を備え、前記コンピュータ可読媒体は、
前記2つの基地局についてのカバレージのエリアを決定することと、
さらにカバレージの前記エリアに基づいて前記再配置可能な基地局の前記位置を推定することと、
のための命令をさらに備える(27)のコンピュータ可読媒体。
(29)
再配置可能な基地局の場所を見つける方法であって、前記再配置可能な基地局は、ワイヤレスネットワークの一部分であり、そして限られた数の移動局に対してサービスを提供するように構成されており、前記方法は、
前記移動局のうちの1つに対して位置決定コマンドを送信することと、
前記位置決定コマンドを送信することに続いて、前記移動局のロケーションを示す情報を受信することと、
前記移動局と前記再配置可能な基地局との間の伝搬損失の量の表示を決定することと、
前記受信された情報と前記決定された伝搬損失とに基づいて前記再配置可能な基地局の位置を推定することと、
を備える方法。
Claims (25)
- 有線ネットワーク上で再配置可能とされ、移動局とワイヤレスに通信するように構成された基地局と通信することと、
前記移動局の位置を示す情報を得ることと、
前記移動局と前記再配置可能な基地局との間の伝搬損失を決定することと、
前記得られた位置情報及び前記伝搬損失に基づいて前記再配置可能な基地局の位置を推定することと
を備え、前記移動局は、前記再配置可能な基地局とワイヤレスに通信しており、
前記再配置可能な基地局の位置を推定することは、
前記伝搬損失をしきい値と比較して比較結果を得ることと、
前記比較結果に応じた位置推定動作を用いて前記再配置可能な基地局の位置を推定することと
を備える方法。 - 前記得られた位置情報は、衛星ベースの測位システムと、ワイヤレスネットワークの測位システムとのうちの1つまたはそれ以上に基づいて推定された位置を備える、請求項1の方法。
- 前記得られた位置情報は、前記移動局についての複数の位置と、精度低下率推定値と、をさらに備え、前記の複数の位置と、精度低下率推定値とは、異なる時刻に得られており、前記方法は、前記の複数の位置と、精度低下率推定値とに基づいて前記再配置可能な基地局の前記位置を推定すること、をさらに備える請求項2の方法。
- 前記得られた位置情報は、前記移動局がパイロット信号を受信する、第1のワイヤレスネットワークの1つまたは複数の基地局を識別する情報を備え、前記方法は、
前記1つまたは複数の基地局の位置に関連する位置情報を得ることと、
前記1つまたは複数の基地局の前記位置に基づいて前記再配置可能な基地局の前記位置を推定することと、
をさらに備える請求項1の方法。 - 前記移動局がパイロット信号を受信する前記1つまたは複数の基地局のうちの少なくとも1つは、別の再配置可能な基地局である、請求項4の方法。
- 前記1つまたは複数の基地局は、第2のワイヤレスネットワークの中で動作する少なくとも1つの基地局を備え、前記第2のワイヤレスネットワークは、前記第1のワイヤレスネットワークとは異なるワイヤレスネットワークである、請求項4の方法。
- 前記得られた位置情報は、前記移動局がパイロット信号を受信する、前記第1のワイヤレスネットワークの2つ以上の基地局を識別する情報を備え、前記方法は、
前記2つの基地局についてのカバレージのエリアを決定することと、
さらにカバレージの前記エリアに基づいて前記再配置可能な基地局の前記位置を推定することと、
をさらに備える請求項4の方法。 - 前記移動局に対して位置決定コマンドを発行することと、
前記位置決定コマンドを発行することに続いて前記位置情報を得ることと、
をさらに備える請求項1の方法。 - 前記再配置可能な基地局は、さらに、限られた数の移動局に対してサービスを提供するように構成されている、請求項1の方法。
- 有線ネットワーク上で再配置可能とされ、移動局とワイヤレスに通信するように構成された基地局と通信するように構成されたレシーバと、
前記レシーバに結合され、そして前記移動局の位置を示す情報を得るように構成されたプロセッサと、
前記移動局と前記再配置可能な基地局との間の伝搬損失を決定するように構成された受信信号強度インジケータモジュールと、
前記プロセッサに結合され、前記得られた位置情報及び前記伝搬損失に基づいて前記再配置可能な基地局の位置を推定するように構成された位置推定モジュールと
を備え、前記移動局は、前記再配置可能な基地局とワイヤレスに通信しており、
前記位置推定モジュールは、前記伝搬損失をしきい値と比較して比較結果を得ることによって前記再配置可能な基地局の位置を推定し、前記比較結果に応じた位置推定動作を用いて前記再配置可能な基地局の位置を推定するように構成されているネットワークコントローラ。 - 前記得られた位置情報は、衛星ベースの測位システムと、ワイヤレスネットワークの測位システムとのうちの1つまたはそれ以上に基づいて推定された位置を備える、請求項10のネットワークコントローラ。
- 前記得られた位置情報は、前記移動局についての複数の位置と、精度低下率推定値と、をさらに備え、前記の複数の位置と、精度低下率推定値とは、異なる時刻に得られており、前記位置推定モジュールは、さらに、前記の複数の位置と、精度低下率推定値とに基づいて前記再配置可能な基地局の前記位置を推定するように構成されている、請求項11のネットワークコントローラ。
- 前記得られた位置情報は、前記移動局がパイロット信号を受信する、第1のワイヤレスネットワークの1つまたは複数の基地局を識別する情報を備え、前記プロセッサは、さらに、前記1つまたは複数の基地局の位置に関連する位置情報を得るように構成されており、そして前記位置推定モジュールは、さらに、前記1つまたは複数の基地局の前記位置に基づいて前記再配置可能な基地局の前記位置を推定するように構成されている、請求項10のネットワークコントローラ。
- 前記移動局がパイロット信号を受信する前記1つまたは複数の基地局のうちの少なくとも1つは、別の再配置可能な基地局である、請求項13のネットワークコントローラ。
- 前記1つまたは複数の基地局は、第2のワイヤレスネットワークの中で動作する少なくとも1つの基地局を備え、前記第2のワイヤレスネットワークは、前記第1のワイヤレスネットワークとは異なるワイヤレスネットワークである、請求項13のネットワークコントローラ。
- 前記得られた位置情報は、前記移動局がパイロット信号を受信する、前記第1のワイヤレスネットワークの2つ以上の基地局を識別する情報を備え、前記位置推定モジュールは、さらに、前記2つの基地局についてのカバレージのエリアを決定するように、そしてさらにカバレージの前記エリアに基づいて前記再配置可能な基地局の前記位置を推定するように、構成されている、請求項13のネットワークコントローラ。
- 前記移動局に対して位置決定コマンドを発行するように構成されたトランスミッタをさらに備え、前記プロセッサは、さらに、前記位置決定コマンドを発行することに続いて前記位置情報を得るように構成されている、請求項10のネットワークコントローラ。
- 前記再配置可能な基地局は、さらに、限られた数の移動局に対してサービスを提供するように構成されている、請求項10のネットワークコントローラ。
- 有線ネットワーク上で再配置可能とされ、移動局とワイヤレスに通信するように構成された基地局と通信するための手段と、
前記移動局の位置を示す情報を得るための手段と、
前記移動局と前記再配置可能な基地局との間の伝搬損失を決定するための手段と、
前記得られた位置情報及び前記伝搬損失に基づいて前記再配置可能な基地局の位置を推定するための手段と
を備え、前記移動局は、前記再配置可能な基地局とワイヤレスに通信しており、
前記再配置可能な基地局の位置を推定するための手段は、
前記伝搬損失をしきい値と比較して比較結果を得るための手段と、
前記比較結果に応じた位置推定動作を用いて前記再配置可能な基地局の位置を推定するための手段と
を備えるネットワークコントローラ。 - 前記得られた位置情報は、前記移動局がパイロット信号を受信する、第1のワイヤレスネットワークの1つまたは複数の基地局を識別する情報を備え、得るための前記手段は、前記1つまたは複数の基地局の位置に関連する位置情報を得ており、推定するための前記手段は、前記1つまたは複数の基地局の前記位置に基づいて前記再配置可能な基地局の前記位置を推定する、請求項19のネットワークコントローラ。
- 前記得られた位置情報は、前記移動局がパイロット信号を受信する、前記第1のワイヤレスネットワークの2つ以上の基地局を識別する情報を備え、推定するための前記手段は、前記2つの基地局についてのカバレージのエリアを決定し、そしてさらにカバレージの前記エリアに基づいて前記再配置可能な基地局の前記位置を推定する、請求項20のネットワークコントローラ。
- 方法を実行するためのコンピュータ実行可能命令を有するプログラムが記録されたコンピュータ可読媒体であって、前記方法は、
有線ネットワーク上で再配置可能とされ、移動局とワイヤレスに通信するように構成された基地局と通信することと、
前記移動局の位置を示す情報を得ることと、
前記移動局と前記再配置可能な基地局との間の伝搬損失を決定することと、
前記得られた位置情報及び前記伝搬損失に基づいて前記再配置可能な基地局の位置を推定することと
を備え、前記移動局は、前記再配置可能な基地局とワイヤレスに通信しており、
前記再配置可能な基地局の位置を推定することは、
前記伝搬損失をしきい値と比較して比較結果を得ることと、
前記比較結果に応じた位置推定動作を用いて前記再配置可能な基地局の位置を推定することと
を備えるコンピュータ可読媒体。 - 前記得られた位置情報は、前記移動局がパイロット信号を受信する、第1のワイヤレスネットワークの1つまたは複数の基地局を識別する情報を備え、前記コンピュータ可読媒体は、
前記1つまたは複数の基地局の位置に関連する位置情報を得ることと、
前記1つまたは複数の基地局の前記位置に基づいて前記再配置可能な基地局の前記位置を推定することと、
のための命令をさらに備える請求項22のコンピュータ可読媒体。 - 前記得られた位置情報は、前記移動局がパイロット信号を受信する、前記第1のワイヤレスネットワークの2つ以上の基地局を識別する情報を備え、前記コンピュータ可読媒体は、
前記2つの基地局についてのカバレージのエリアを決定することと、
さらにカバレージの前記エリアに基づいて前記再配置可能な基地局の前記位置を推定することと、
のための命令をさらに備える請求項23のコンピュータ可読媒体。 - 再配置可能な基地局の場所を見つける方法であって、前記再配置可能な基地局は、ワイヤレスネットワークの一部分であり、そして限られた数の移動局に対してサービスを提供するように構成されており、前記方法は、
前記移動局のうちの1つに対して位置決定コマンドを送信することと、
前記位置決定コマンドを送信することに続いて、前記移動局のロケーションを示す情報を受信することと、
前記移動局と前記再配置可能な基地局との間の伝搬損失の量の表示を決定することと、
前記受信された情報と前記決定された伝搬損失とに基づいて前記再配置可能な基地局の位置を推定することと、
を備え、
前記再配置可能な基地局の位置を推定することは、
前記伝搬損失をしきい値と比較して比較結果を得ることと、
前記比較結果に応じた位置推定動作を用いて前記再配置可能な基地局の位置を推定することと
を備える方法。
Applications Claiming Priority (5)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| US94156407P | 2007-06-01 | 2007-06-01 | |
| US60/941,564 | 2007-06-01 | ||
| US12/126,722 | 2008-05-23 | ||
| US12/126,722 US8483719B2 (en) | 2007-06-01 | 2008-05-23 | Methods and apparatus for determining FEMTO base station location |
| PCT/US2008/065160 WO2009017877A2 (en) | 2007-06-01 | 2008-05-29 | Methods and apparatus for determining femto base station location |
Related Child Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2013034553A Division JP5583801B2 (ja) | 2007-06-01 | 2013-02-25 | フェムト基地局ロケーションを決定するための方法および装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2010529750A JP2010529750A (ja) | 2010-08-26 |
| JP5259701B2 true JP5259701B2 (ja) | 2013-08-07 |
Family
ID=40088905
Family Applications (2)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2010510495A Expired - Fee Related JP5259701B2 (ja) | 2007-06-01 | 2008-05-29 | フェムト基地局ロケーションを決定するための方法および装置 |
| JP2013034553A Expired - Fee Related JP5583801B2 (ja) | 2007-06-01 | 2013-02-25 | フェムト基地局ロケーションを決定するための方法および装置 |
Family Applications After (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2013034553A Expired - Fee Related JP5583801B2 (ja) | 2007-06-01 | 2013-02-25 | フェムト基地局ロケーションを決定するための方法および装置 |
Country Status (7)
| Country | Link |
|---|---|
| US (1) | US8483719B2 (ja) |
| EP (1) | EP2168400A2 (ja) |
| JP (2) | JP5259701B2 (ja) |
| KR (1) | KR101136634B1 (ja) |
| CN (1) | CN101682903B (ja) |
| TW (1) | TW200920148A (ja) |
| WO (1) | WO2009017877A2 (ja) |
Families Citing this family (80)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US7123928B2 (en) | 2003-07-21 | 2006-10-17 | Qualcomm Incorporated | Method and apparatus for creating and using a base station almanac for position determination |
| BRPI0418696A (pt) | 2004-04-02 | 2007-06-12 | Qualcomm Inc | métodos e equipamentos para sistemas de determinação de posição assistida por sinalizador |
| US7623857B1 (en) * | 2005-10-21 | 2009-11-24 | At&T Intellectual Property I, L.P. | Intelligent pico-cell for transport of wireless device communications over wireline networks |
| US8326296B1 (en) | 2006-07-12 | 2012-12-04 | At&T Intellectual Property I, L.P. | Pico-cell extension for cellular network |
| US7831216B1 (en) | 2007-11-27 | 2010-11-09 | Sprint Spectrum L.P. | Mobile-station-assisted low-cost-internet-base-station-(LCIB) location determination |
| EP2079259A1 (en) * | 2008-01-02 | 2009-07-15 | Alcatel Lucent | Method of determining a location of a base station in a wireless communication network and base station in a wireless communication network |
| US8626223B2 (en) | 2008-05-07 | 2014-01-07 | At&T Mobility Ii Llc | Femto cell signaling gating |
| US8719420B2 (en) * | 2008-05-13 | 2014-05-06 | At&T Mobility Ii Llc | Administration of access lists for femtocell service |
| US8209745B2 (en) * | 2008-05-13 | 2012-06-26 | At&T Mobility Ii Llc | Automatic population of an access control list to manage femto cell coverage |
| US8743776B2 (en) | 2008-06-12 | 2014-06-03 | At&T Mobility Ii Llc | Point of sales and customer support for femtocell service and equipment |
| US8862137B2 (en) * | 2008-11-05 | 2014-10-14 | Alcatel Lucent | Method for associating a premier femtocell with user equipment |
| US8200239B2 (en) * | 2008-11-11 | 2012-06-12 | Trueposition, Inc. | Femto-cell location by proxy methods |
| US8180368B2 (en) * | 2008-11-11 | 2012-05-15 | Trueposition, Inc. | Femto-cell location by direct methods |
| US20100144366A1 (en) * | 2008-12-05 | 2010-06-10 | Atsushi Ishii | Methods and systems for determining the location of a femtocell |
| DE102009003540B4 (de) * | 2009-02-26 | 2011-12-01 | Deutsche Telekom Ag | Verfahren zur Standortbestimmung einer Femtozelle |
| KR101268940B1 (ko) * | 2009-02-26 | 2013-05-30 | 주식회사 씨에스 | 통신 시스템에서 펨토 기지국 및 그 제어 방법 |
| CN101895812B (zh) * | 2009-03-12 | 2014-02-26 | 无锡爱维特信息技术有限公司 | 一种在蜂窝网络中的最匹配信号强度的定位方法 |
| US9344902B2 (en) * | 2009-04-03 | 2016-05-17 | Broadcom Corporation | Method and system for evaluating deployment of femtocells as part of a cellular network |
| FR2945701B1 (fr) * | 2009-05-13 | 2012-05-18 | Radiotelephone Sfr | Systeme et procede de localisation d'un terminal mobile et connecte a une femto-cellule |
| US8417264B1 (en) | 2009-05-14 | 2013-04-09 | Spring Spectrum L.P. | Method and apparatus for determining location of a mobile station based on locations of multiple nearby mobile stations |
| US8249604B2 (en) * | 2009-06-04 | 2012-08-21 | United States Cellular Corporation | System and method for landline replacement |
| US7995482B2 (en) * | 2009-06-08 | 2011-08-09 | Alcatel-Lucent Usa Inc. | Femto base stations and methods for operating the same |
| US8600297B2 (en) * | 2009-07-28 | 2013-12-03 | Qualcomm Incorporated | Method and system for femto cell self-timing and self-locating |
| US20110030035A1 (en) | 2009-07-31 | 2011-02-03 | Chih-Hsiang Wu | Method of managing authorization of private node b in a wireless communication system and related device |
| US8483713B2 (en) | 2009-09-02 | 2013-07-09 | At&T Mobility Ii Llc | Location determination for calls within a femtocell |
| US20110086636A1 (en) * | 2009-10-09 | 2011-04-14 | Industrial Technology Research Institute | System and method for home cellular networks |
| US8510801B2 (en) | 2009-10-15 | 2013-08-13 | At&T Intellectual Property I, L.P. | Management of access to service in an access point |
| US8750870B2 (en) * | 2010-01-08 | 2014-06-10 | Qualcomm Incorporated | Method and apparatus for positioning of devices in a wireless network |
| US9307516B2 (en) * | 2010-01-19 | 2016-04-05 | Broadcom Corporation | Method and system for locating a Femtocell using measurement reports |
| US20110199964A1 (en) * | 2010-02-12 | 2011-08-18 | Jeyhan Karaoguz | Method and system for determining a location of an access point based on association of the access point with a communication device having a known location |
| JP5597730B2 (ja) * | 2010-03-10 | 2014-10-01 | インターデイジタル パテント ホールディングス インコーポレイテッド | インフラストラクチャデバイスおよび端末デバイスの位置決定 |
| WO2011124941A1 (en) * | 2010-04-09 | 2011-10-13 | Nokia Corporation | Wireless device assisted self-positioning |
| US9366760B2 (en) | 2010-04-12 | 2016-06-14 | Telefonaktiebolaget Lm Ericsson (Publ) | Coverage extension of position services |
| GB2479577B (en) * | 2010-04-15 | 2015-05-27 | Samsung Electronics Co Ltd | Improvements relating to wireless networks |
| US8811977B2 (en) * | 2010-05-06 | 2014-08-19 | At&T Mobility Ii Llc | Device-driven intelligence and feedback for performance optimization and planning of a service network |
| JP5767449B2 (ja) | 2010-07-28 | 2015-08-19 | 京セラ株式会社 | 無線基地局及びその制御方法、無線端末、プロセッサ |
| RU2558153C2 (ru) | 2010-09-13 | 2015-07-27 | Нокиа Корпорейшн | Способ и устройство для обслуживания информации о точках доступа |
| US9234965B2 (en) * | 2010-09-17 | 2016-01-12 | Qualcomm Incorporated | Indoor positioning using pressure sensors |
| JP2012080471A (ja) * | 2010-10-05 | 2012-04-19 | Kyocera Corp | 位置推定方法及び無線基地局 |
| KR101696387B1 (ko) * | 2010-10-13 | 2017-01-16 | 에스케이텔레콤 주식회사 | 기지국 위치 추정 시스템 및 방법 |
| TW201220903A (en) * | 2010-11-04 | 2012-05-16 | Askey Computer Corp | Method for applying SUPL platform to position pico-base-station, and system thereof |
| JP5648434B2 (ja) * | 2010-11-11 | 2015-01-07 | 富士通株式会社 | 無線基地局及び位置検出方法 |
| US8606188B2 (en) * | 2010-11-19 | 2013-12-10 | Qualcomm Incorporated | Self-positioning of a wireless station |
| US8954065B2 (en) * | 2010-11-24 | 2015-02-10 | Lg Electronics Inc. | Method of communicating data based on an unlicensed band in a wireless communication system |
| US9144054B2 (en) * | 2010-12-03 | 2015-09-22 | Qualcomm Incorporated | Distributed A-GNSS positioning of static devices |
| JP5570964B2 (ja) * | 2010-12-24 | 2014-08-13 | 株式会社東芝 | 地上装置 |
| FR2970141B1 (fr) * | 2010-12-29 | 2013-07-26 | Radiotelephone Sfr | Procede et systeme de geolocalisation d'un equipement appartenant a un reseau, par exemple un boitier femto |
| US8958835B2 (en) | 2011-03-07 | 2015-02-17 | Telefonaktiebolaget L M Ericsson (Publ) | Wireless device position determining and frequency assigning systems, devices and methods |
| CN102695172A (zh) * | 2011-03-21 | 2012-09-26 | 国基电子(上海)有限公司 | 毫微微型(Femto)存取点接入系统及接入方法 |
| US8903414B2 (en) * | 2011-06-03 | 2014-12-02 | Apple Inc. | Location estimation using a probability density function |
| CN104363618B (zh) * | 2011-07-14 | 2018-10-23 | 中国移动通信集团上海有限公司 | 一种家庭基站定位方法以及装置 |
| CN102281629A (zh) * | 2011-08-22 | 2011-12-14 | 北京邮电大学 | 一种定位的方法和装置 |
| CN102300220B (zh) * | 2011-09-16 | 2014-01-01 | 华为技术有限公司 | 确定微基站部署位置的方法与装置 |
| US8825077B2 (en) * | 2012-01-27 | 2014-09-02 | Qualcomm Incorporated | Method and system for femtocell positioning |
| CN102547570B (zh) * | 2012-02-20 | 2016-01-13 | 北京邮电大学 | 一种伪距差值定位方法及装置 |
| US9037109B1 (en) | 2012-03-02 | 2015-05-19 | Sprint Spectrum L.P. | Controlling billing for use of one system based on device location in other system |
| CN102625445B (zh) * | 2012-03-02 | 2014-09-03 | 黄东 | 一种蜂窝网络的移动台被动定位方法 |
| WO2013174013A1 (zh) * | 2012-05-25 | 2013-11-28 | 华为技术有限公司 | 一种确定站址的方法、服务器及系统 |
| US9408178B2 (en) | 2013-01-22 | 2016-08-02 | Apple Inc. | Detecting mobile access points |
| US20140274114A1 (en) * | 2013-03-14 | 2014-09-18 | Qualcomm Incorporated | Positioning based on signals injected into concealed infrastructure |
| JP6229310B2 (ja) * | 2013-05-24 | 2017-11-15 | 富士通株式会社 | 制御装置、端末装置、及びセルサーチ制御方法 |
| US9400321B2 (en) | 2013-06-05 | 2016-07-26 | Apple Inc. | Utilizing mobile wireless access gateways for location and context purposes |
| US20150045055A1 (en) * | 2013-08-06 | 2015-02-12 | Gaby Prechner | Time of flight responders |
| US9622209B1 (en) | 2013-08-15 | 2017-04-11 | Sprint Spectrum L.P. | Alternative location source for low-cost internet base station systems when satellite-based positioning system coverage is unavailable |
| US9674656B2 (en) * | 2014-02-20 | 2017-06-06 | Microsoft Technology Licensing, Llc | Wireless-based localization using a zonal framework |
| JP6288673B2 (ja) * | 2014-03-31 | 2018-03-07 | Kddi株式会社 | 通信ログから基地局の位置を推定する通信ログ分析装置、プログラム及び方法 |
| US9791572B2 (en) | 2014-05-16 | 2017-10-17 | Apple Inc. | Batch processing for improved georeferencing |
| CN105491657B (zh) * | 2014-09-17 | 2019-10-29 | 联想(北京)有限公司 | 一种信息处理方法及电子设备 |
| CN105472730A (zh) * | 2014-09-25 | 2016-04-06 | 阿里巴巴集团控股有限公司 | 一种网络定位方法及装置 |
| JP6569228B2 (ja) * | 2015-02-02 | 2019-09-04 | 富士通コネクテッドテクノロジーズ株式会社 | 移動機、位置推定方法および位置推定プログラム |
| CN105741387A (zh) * | 2016-01-22 | 2016-07-06 | 刘思超 | 一种门禁识别方法、门禁卡、服务器和门禁识别系统 |
| WO2017208801A1 (ja) * | 2016-06-03 | 2017-12-07 | 日本電気株式会社 | 解析装置、解析方法、及び、非一時的なコンピュータ可読媒体 |
| JP6506217B2 (ja) * | 2016-07-12 | 2019-04-24 | 日本電信電話株式会社 | 可動無線局制御方法、無線通信システム及び集中制御局 |
| US10324168B2 (en) * | 2016-09-12 | 2019-06-18 | The Boeing Company | Systems and methods for spatial filtering using data with widely different error magnitudes |
| KR101893053B1 (ko) | 2017-05-17 | 2018-08-29 | 주식회사 이노와이어리스 | 스몰 셀 설치 위치 변경 자동 검출 방법 |
| KR101882779B1 (ko) | 2017-05-17 | 2018-07-27 | 주식회사 이노와이어리스 | 스몰 셀 설치 작업 모니터링 방법 |
| KR102276111B1 (ko) | 2017-08-24 | 2021-07-12 | 삼성전자 주식회사 | 이동 통신 시스템에서 기지국의 위치 결정 방법 및 장치 |
| US20200322681A1 (en) * | 2019-04-08 | 2020-10-08 | Edge Networks, Inc. | Congestion Aware Hybrid File Transfer |
| WO2021234826A1 (ja) * | 2020-05-19 | 2021-11-25 | ソフトバンク株式会社 | サーバ、無線装置及び無線通信方法 |
| US11683090B1 (en) | 2022-01-18 | 2023-06-20 | T-Mobile Usa, Inc. | Laser-based enhancement of signal propagation path for mobile communications |
Family Cites Families (13)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US6496543B1 (en) * | 1996-10-29 | 2002-12-17 | Qualcomm Incorporated | Method and apparatus for providing high speed data communications in a cellular environment |
| US6040800A (en) * | 1997-04-22 | 2000-03-21 | Ericsson Inc. | Systems and methods for locating remote terminals in radiocommunication systems |
| US6282427B1 (en) * | 1999-07-14 | 2001-08-28 | Telefonaktiebolaget L M Ericsson (Publ) | Selection of location measurement units for determining the position of a mobile communication station |
| GB0012641D0 (en) | 2000-05-25 | 2000-07-12 | Koninkl Philips Electronics Nv | A method of estimating the location of a device |
| US7127257B2 (en) | 2001-12-27 | 2006-10-24 | Qualcomm Incorporated | Use of mobile stations for determination of base station location parameters in a wireless mobile communication system |
| CN1833462A (zh) | 2003-06-27 | 2006-09-13 | 高通股份有限公司 | 用于无线网络混合定位的方法和设备 |
| US7205938B2 (en) * | 2004-03-05 | 2007-04-17 | Airespace, Inc. | Wireless node location mechanism responsive to observed propagation characteristics of wireless network infrastructure signals |
| US7751833B2 (en) * | 2005-03-15 | 2010-07-06 | Nextel Communications Inc. | System and method for determining a base transceiver station location |
| US8589532B2 (en) * | 2005-06-24 | 2013-11-19 | Qualcomm Incorporated | Apparatus and method for determining WLAN access point position |
| DE202005021930U1 (de) | 2005-08-01 | 2011-08-08 | Corning Cable Systems Llc | Faseroptische Auskoppelkabel und vorverbundene Baugruppen mit Toning-Teilen |
| WO2007015075A1 (en) | 2005-08-01 | 2007-02-08 | Ubiquisys Limited | Private access point containing a sim card |
| CN101278580B (zh) * | 2005-10-04 | 2012-10-17 | 艾利森电话股份有限公司 | Ip连接的无线电基站的无线电网络控制器选择 |
| EP2077050A4 (en) * | 2006-10-27 | 2012-10-24 | Ericsson Telefon Ab L M | METHOD AND DEVICE FOR ESTIMATING A POSITION OF AN ACCESS POINT IN A WIRELESS COMMUNICATION NETWORK |
-
2008
- 2008-05-23 US US12/126,722 patent/US8483719B2/en not_active Expired - Fee Related
- 2008-05-29 WO PCT/US2008/065160 patent/WO2009017877A2/en active Application Filing
- 2008-05-29 JP JP2010510495A patent/JP5259701B2/ja not_active Expired - Fee Related
- 2008-05-29 KR KR1020097027607A patent/KR101136634B1/ko not_active IP Right Cessation
- 2008-05-29 CN CN200880018409.9A patent/CN101682903B/zh not_active Expired - Fee Related
- 2008-05-29 EP EP08826756A patent/EP2168400A2/en not_active Withdrawn
- 2008-05-30 TW TW097120361A patent/TW200920148A/zh unknown
-
2013
- 2013-02-25 JP JP2013034553A patent/JP5583801B2/ja not_active Expired - Fee Related
Also Published As
| Publication number | Publication date |
|---|---|
| CN101682903A (zh) | 2010-03-24 |
| CN101682903B (zh) | 2014-09-17 |
| WO2009017877A3 (en) | 2009-08-13 |
| KR20100036281A (ko) | 2010-04-07 |
| KR101136634B1 (ko) | 2012-04-18 |
| EP2168400A2 (en) | 2010-03-31 |
| JP2010529750A (ja) | 2010-08-26 |
| US8483719B2 (en) | 2013-07-09 |
| US20080299992A1 (en) | 2008-12-04 |
| WO2009017877A2 (en) | 2009-02-05 |
| TW200920148A (en) | 2009-05-01 |
| JP5583801B2 (ja) | 2014-09-03 |
| JP2013176047A (ja) | 2013-09-05 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5583801B2 (ja) | フェムト基地局ロケーションを決定するための方法および装置 | |
| JP5826806B2 (ja) | 無線移動通信ネットワークにおいて複数の移動局を用いて基地局の所在位置を決定する方法及び装置 | |
| US11619702B2 (en) | Method and apparatus for enhanced positioning in 5G-NR using DAOD and DAOA | |
| KR101123594B1 (ko) | 이력 네트워크 정보를 이용하여 근사 포지션을 결정하기 위한 방법 및 장치 | |
| US8370629B1 (en) | Trusted hybrid location system | |
| US8700065B2 (en) | Location determination for calls within a femtocell | |
| JP6189538B2 (ja) | 屋内ロケーションのセキュリティおよびプライバシー | |
| US8681741B1 (en) | Autonomous hybrid WLAN/GPS location self-awareness | |
| US8738035B1 (en) | System and method for hybrid positioning using Wi-Fi and GNSS blending | |
| US7577443B1 (en) | Mobile-station and macro-network-aided location determination of a low-cost internet base station (LCIB) | |
| US8781507B2 (en) | Obtaining timing of LTE wireless base stations using aggregated OTDOA assistance data | |
| US20150215762A1 (en) | Method and apparatus for verifying the identity of a wireless device | |
| US20080123608A1 (en) | Positioning for WLANs and other wireless networks | |
| US8954089B2 (en) | Positioning LTE wireless base stations using aggregated OTDOA assistance data | |
| US9763045B2 (en) | Base station selection for positioning/localization based on an indication of capacity | |
| CN104904145A (zh) | 用于rf性能度量估计的方法和装置 | |
| JP2012523761A (ja) | 無線ネットワークにおいてピア・ツー・ピア位置決めを提供するための方法および装置 | |
| BR122018008084B1 (pt) | Método e equipamento para posicionamento híbrido de rede sem fio | |
| JP2011511269A (ja) | 統合ワイヤレスデバイスロケーション決定のための方法、システムおよび装置 | |
| EP3146772A1 (en) | Use of rf signatures to detect moved wireless transmitters | |
| CN112804748B (zh) | 定位方法、定位服务器、终端、移动基站及存储介质 | |
| US9622209B1 (en) | Alternative location source for low-cost internet base station systems when satellite-based positioning system coverage is unavailable |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20120315 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20120327 |
|
| A601 | Written request for extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A601 Effective date: 20120627 |
|
| A602 | Written permission of extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A602 Effective date: 20120704 |
|
| A601 | Written request for extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A601 Effective date: 20120827 |
|
| A602 | Written permission of extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A602 Effective date: 20120903 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20120927 |
|
| A02 | Decision of refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A02 Effective date: 20121023 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20130225 |
|
| A911 | Transfer to examiner for re-examination before appeal (zenchi) |
Free format text: JAPANESE INTERMEDIATE CODE: A911 Effective date: 20130305 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20130326 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20130424 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20160502 Year of fee payment: 3 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 5259701 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| LAPS | Cancellation because of no payment of annual fees |