JP5259277B2 - 運転支援装置 - Google Patents
運転支援装置 Download PDFInfo
- Publication number
- JP5259277B2 JP5259277B2 JP2008173919A JP2008173919A JP5259277B2 JP 5259277 B2 JP5259277 B2 JP 5259277B2 JP 2008173919 A JP2008173919 A JP 2008173919A JP 2008173919 A JP2008173919 A JP 2008173919A JP 5259277 B2 JP5259277 B2 JP 5259277B2
- Authority
- JP
- Japan
- Prior art keywords
- vehicle
- image
- road
- line
- traveling
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
Images



Landscapes
- Fittings On The Vehicle Exterior For Carrying Loads, And Devices For Holding Or Mounting Articles (AREA)
- Closed-Circuit Television Systems (AREA)
- Traffic Control Systems (AREA)
Description
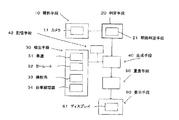
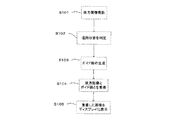
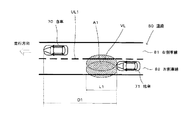
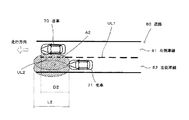
以下、本発明の第1実施形態について、図面を参照して説明する。図1は本実施形態に係る車両周辺の運転支援装置の全体構成のブロック図であり、図2は運転支援装置の作動を表すフローチャートであり、図3と図4は運転支援装置が作動する状況の一例を表すものであり、図3は後方が暗く仕切線が視認できない場合、図4は隣接する車線の後続車が自車に近接しハレーションによって仕切線が視認できない場合を示している。
次に、本発明の第2実施形態について図面を参照して説明する。なお、第1実施形態と重複する部分については省略し、差異のある部分を中心に説明する。図7は、本実施形態に係る概念説明図である。
11 カメラ
12 重畳画像
20 判定手段
30 検出手段
31 車速
32 ヨーレート
33 操舵角
34 白車線認識
40 生成手段
41 明暗判定手段
42 記憶手段
50 重畳手段
51 重畳画像
60 表示手段
61 ディスプレイ
70 自車
71 他車
80 道路
81 右側車線
82 左側車線
GL ガイド線
Claims (8)
- 自車の周辺を撮影した画像を運転者に視認可能に表示する運転支援装置であって、
自車の後側方の画像を撮影する撮影手段と、
前記画像に基づき、道路の状態を判定する判定手段と、
自車の走行状態を検出する検出手段と、
前記自車が複数の車線を有する道路を走行するとき、前記走行状態に基づいて前記複数の車線を識別するガイド線を生成する生成手段と、
前記ガイド線が前記画像に重畳して表示される重畳画像を生成する重畳手段と、
前記重畳画像を表示する表示手段と、を備え、
前記ガイド線は、少なくとも地平線に相当する線分と、前記複数の車線を仕切る仕切線を仮想的に表した仮想仕切線とを含み、
前記仮想仕切線は、前記自車が走行する自車線に隣接する隣車線における路側帯を含む、
車両の運転支援装置。 - 前記重畳画像に表示されるガイド線は、前記画像と識別して視認できる明暗および/または色彩を有する請求項1に記載の車両の運転支援装置。
- 前記画像の輝度によって、自車周辺の明暗および/または色彩を判定する明暗判定手段をさらに有し、
前記ガイド線の明暗および/または色彩は、前記画像の輝度によって前記明暗判定手段が決定する請求項2に記載の車両の運転支援装置。 - 前記ガイド線は、前記仮想仕切線と略直交する仮想横断線である請求項1ないし請求項3のいずれか一項に記載の車両の運転支援装置。
- 前記検出手段が検出した走行状態を蓄積する記憶手段をさらに有し、
前記生成手段は、前記記憶手段に蓄積された現在の前記走行状態または/および過去の前記走行状態に基づき、ガイド線を生成する請求項1ないし請求項4のいずれか一項に記載の車両の運転支援装置。 - 前記記憶手段は、道路情報を記憶しており、
前記道路情報は、自車が走行している道路の車線数の情報を含む請求項1ないし請求項5のいずれか一項に記載の車両の運転支援装置。 - 自車の後方もしくは後側方を走行する他車の他車走行状態を検出する他車検出手段をさらに有し、
前記他車検出手段は、他車の位置を検出し、
前記ガイド線に対する前記他車の位置が、前記重畳画像にさらに重畳して表示される請求項1ないし請求項6のいずれか一項に記載の運転支援装置。 - 前記ガイド線は、前記画像の輝度が所定の輝度より高い領域を背景とする部分と低い領域を背景とする部分とで、異なる色を用いて表示される、
請求項3に記載の車両の運転支援装置。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2008173919A JP5259277B2 (ja) | 2008-07-02 | 2008-07-02 | 運転支援装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2008173919A JP5259277B2 (ja) | 2008-07-02 | 2008-07-02 | 運転支援装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2010012904A JP2010012904A (ja) | 2010-01-21 |
| JP5259277B2 true JP5259277B2 (ja) | 2013-08-07 |
Family
ID=41699444
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2008173919A Expired - Fee Related JP5259277B2 (ja) | 2008-07-02 | 2008-07-02 | 運転支援装置 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP5259277B2 (ja) |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN109479122A (zh) * | 2016-07-28 | 2019-03-15 | 卡森尼可关精株式会社 | 车辆周围监控装置及车辆周围监控方法 |
| CN111656775A (zh) * | 2018-01-25 | 2020-09-11 | 歌乐株式会社 | 显示控制装置以及显示系统 |
Families Citing this family (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN103535029B (zh) * | 2011-06-13 | 2017-05-24 | 本田技研工业株式会社 | 驾驶辅助装置 |
| JP5817927B2 (ja) * | 2012-05-18 | 2015-11-18 | 日産自動車株式会社 | 車両用表示装置、車両用表示方法及び車両用表示プログラム |
| JP7128585B2 (ja) * | 2018-11-15 | 2022-08-31 | アルパイン株式会社 | 電子ミラーシステム |
| JP7140058B2 (ja) * | 2019-06-27 | 2022-09-21 | トヨタ自動車株式会社 | 車両後側方監視装置 |
| JP7056632B2 (ja) * | 2019-09-05 | 2022-04-19 | トヨタ自動車株式会社 | 運転支援装置 |
Family Cites Families (11)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH0211438A (ja) * | 1988-06-27 | 1990-01-16 | Clarion Co Ltd | 車外情報読取装置 |
| JP3184656B2 (ja) * | 1993-03-04 | 2001-07-09 | シャープ株式会社 | 車載用監視カメラ装置 |
| JP4723703B2 (ja) * | 1999-06-25 | 2011-07-13 | 富士通テン株式会社 | 車両の運転支援装置 |
| JP3802723B2 (ja) * | 2000-01-11 | 2006-07-26 | 日産ディーゼル工業株式会社 | 車両前方状況表示装置 |
| JP2001357497A (ja) * | 2000-06-13 | 2001-12-26 | Mitsubishi Motors Corp | 後方車両監視装置 |
| JP2002104117A (ja) * | 2000-10-03 | 2002-04-10 | Denso Corp | 車両用運転支援システム |
| JP2002362270A (ja) * | 2001-06-11 | 2002-12-18 | Matsushita Electric Ind Co Ltd | 運転支援装置 |
| JP2006051850A (ja) * | 2004-08-10 | 2006-02-23 | Matsushita Electric Ind Co Ltd | 運転支援装置及び運転支援方法 |
| JP4882285B2 (ja) * | 2005-06-15 | 2012-02-22 | 株式会社デンソー | 車両用走行支援装置 |
| JP4644550B2 (ja) * | 2005-07-20 | 2011-03-02 | 株式会社オートネットワーク技術研究所 | カメラシステム |
| JP2007241470A (ja) * | 2006-03-06 | 2007-09-20 | Toyota Motor Corp | 車両用地図データ更新装置 |
-
2008
- 2008-07-02 JP JP2008173919A patent/JP5259277B2/ja not_active Expired - Fee Related
Cited By (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN109479122A (zh) * | 2016-07-28 | 2019-03-15 | 卡森尼可关精株式会社 | 车辆周围监控装置及车辆周围监控方法 |
| CN111656775A (zh) * | 2018-01-25 | 2020-09-11 | 歌乐株式会社 | 显示控制装置以及显示系统 |
| CN111656775B (zh) * | 2018-01-25 | 2022-04-29 | 歌乐株式会社 | 显示控制装置以及显示系统 |
Also Published As
| Publication number | Publication date |
|---|---|
| JP2010012904A (ja) | 2010-01-21 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP7416176B2 (ja) | 表示装置 | |
| JP6259482B2 (ja) | 車両用表示制御装置 | |
| JP6354776B2 (ja) | 車両の制御装置 | |
| US20200324787A1 (en) | Augmented reality method and apparatus for driving assistance | |
| JP6272375B2 (ja) | 車両用表示制御装置 | |
| US20130179023A1 (en) | Methods for informing a motor vehicle driver of a driving maneuver, a driver assistance system for a motor vehicle that utilizes the method, and a motor vehicle having the driver assistance system | |
| JP6460019B2 (ja) | 車両の制御装置 | |
| WO2020125178A1 (zh) | 车辆驾驶提示方法及装置 | |
| JP7662019B2 (ja) | 車載表示装置、方法およびプログラム | |
| JP5259277B2 (ja) | 運転支援装置 | |
| JP2021039659A (ja) | 運転支援装置 | |
| JP7848685B2 (ja) | 情報処理装置、情報処理方法、プログラム、及び投影装置 | |
| US11601621B2 (en) | Vehicular display system | |
| US20170043720A1 (en) | Camera system for displaying an area exterior to a vehicle | |
| CN114987460A (zh) | 用于车辆的盲区辅助的方法和设备 | |
| JP6354804B2 (ja) | 視界制御装置 | |
| JP7436286B2 (ja) | 車載表示システム | |
| CN113448097A (zh) | 车辆用显示装置 | |
| CN113401056B (zh) | 显示控制装置、显示控制方法以及计算机可读取存储介质 | |
| US12371046B2 (en) | Displaying objects to assist a driver in conditions of low visibility | |
| JP6625480B2 (ja) | 表示システム | |
| US8681219B2 (en) | System and method for driving assistance at road intersections | |
| JP2008030729A (ja) | 車両用表示装置 | |
| JP3363935B2 (ja) | 車両の表示装置 | |
| JPH06255397A (ja) | 車両の表示装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20101125 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20120719 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20120828 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20121023 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20121218 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20130208 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20130416 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20130424 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20160502 Year of fee payment: 3 |
|
| R150 | Certificate of patent or registration of utility model |
Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| LAPS | Cancellation because of no payment of annual fees |