JP5249471B2 - 超音波プローブ - Google Patents
超音波プローブ Download PDFInfo
- Publication number
- JP5249471B2 JP5249471B2 JP2012549578A JP2012549578A JP5249471B2 JP 5249471 B2 JP5249471 B2 JP 5249471B2 JP 2012549578 A JP2012549578 A JP 2012549578A JP 2012549578 A JP2012549578 A JP 2012549578A JP 5249471 B2 JP5249471 B2 JP 5249471B2
- Authority
- JP
- Japan
- Prior art keywords
- ultrasonic
- longitudinal axis
- probe
- ultrasonic probe
- main body
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
- 239000000523 sample Substances 0.000 title claims abstract description 272
- 230000002093 peripheral effect Effects 0.000 claims abstract description 32
- 239000011248 coating agent Substances 0.000 claims description 6
- 238000000576 coating method Methods 0.000 claims description 6
- 238000003780 insertion Methods 0.000 claims description 5
- 230000037431 insertion Effects 0.000 claims description 5
- 230000003187 abdominal effect Effects 0.000 claims 2
- 239000011800 void material Substances 0.000 abstract 4
- XLYOFNOQVPJJNP-UHFFFAOYSA-N water Substances O XLYOFNOQVPJJNP-UHFFFAOYSA-N 0.000 description 28
- 230000004048 modification Effects 0.000 description 27
- 238000012986 modification Methods 0.000 description 27
- 230000005540 biological transmission Effects 0.000 description 26
- 238000009210 therapy by ultrasound Methods 0.000 description 17
- 239000007788 liquid Substances 0.000 description 15
- 230000008859 change Effects 0.000 description 11
- 238000010586 diagram Methods 0.000 description 10
- 238000005553 drilling Methods 0.000 description 9
- 238000004519 manufacturing process Methods 0.000 description 9
- 238000000034 method Methods 0.000 description 7
- 210000004204 blood vessel Anatomy 0.000 description 5
- 238000006073 displacement reaction Methods 0.000 description 5
- 210000003494 hepatocyte Anatomy 0.000 description 4
- 239000000853 adhesive Substances 0.000 description 3
- 230000001070 adhesive effect Effects 0.000 description 3
- 230000000694 effects Effects 0.000 description 3
- 229920001971 elastomer Polymers 0.000 description 3
- 239000000463 material Substances 0.000 description 3
- 230000015271 coagulation Effects 0.000 description 2
- 238000005345 coagulation Methods 0.000 description 2
- 230000000052 comparative effect Effects 0.000 description 2
- 239000002504 physiological saline solution Substances 0.000 description 2
- 230000001105 regulatory effect Effects 0.000 description 2
- 230000008901 benefit Effects 0.000 description 1
- 230000015572 biosynthetic process Effects 0.000 description 1
- 230000000740 bleeding effect Effects 0.000 description 1
- 238000004140 cleaning Methods 0.000 description 1
- 238000012790 confirmation Methods 0.000 description 1
- 238000005520 cutting process Methods 0.000 description 1
- 238000005242 forging Methods 0.000 description 1
- 229920006015 heat resistant resin Polymers 0.000 description 1
- 238000003801 milling Methods 0.000 description 1
- 230000008569 process Effects 0.000 description 1
- 229920006395 saturated elastomer Polymers 0.000 description 1
Images





















Classifications
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods, e.g. tourniquets
- A61B17/32—Surgical cutting instruments
- A61B17/320068—Surgical cutting instruments using mechanical vibrations, e.g. ultrasonic
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61N—ELECTROTHERAPY; MAGNETOTHERAPY; RADIATION THERAPY; ULTRASOUND THERAPY
- A61N7/00—Ultrasound therapy
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B18/00—Surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body
- A61B18/04—Surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body by heating
- A61B18/12—Surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body by heating by passing a current through the tissue to be heated, e.g. high-frequency current
- A61B18/14—Probes or electrodes therefor
- A61B18/1442—Probes having pivoting end effectors, e.g. forceps
- A61B18/1445—Probes having pivoting end effectors, e.g. forceps at the distal end of a shaft, e.g. forceps or scissors at the end of a rigid rod
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods, e.g. tourniquets
- A61B2017/00526—Methods of manufacturing
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods, e.g. tourniquets
- A61B17/22—Implements for squeezing-off ulcers or the like on the inside of inner organs of the body; Implements for scraping-out cavities of body organs, e.g. bones; Calculus removers; Calculus smashing apparatus; Apparatus for removing obstructions in blood vessels, not otherwise provided for
- A61B17/22004—Implements for squeezing-off ulcers or the like on the inside of inner organs of the body; Implements for scraping-out cavities of body organs, e.g. bones; Calculus removers; Calculus smashing apparatus; Apparatus for removing obstructions in blood vessels, not otherwise provided for using mechanical vibrations, e.g. ultrasonic shock waves
- A61B17/22012—Implements for squeezing-off ulcers or the like on the inside of inner organs of the body; Implements for scraping-out cavities of body organs, e.g. bones; Calculus removers; Calculus smashing apparatus; Apparatus for removing obstructions in blood vessels, not otherwise provided for using mechanical vibrations, e.g. ultrasonic shock waves in direct contact with, or very close to, the obstruction or concrement
- A61B2017/22014—Implements for squeezing-off ulcers or the like on the inside of inner organs of the body; Implements for scraping-out cavities of body organs, e.g. bones; Calculus removers; Calculus smashing apparatus; Apparatus for removing obstructions in blood vessels, not otherwise provided for using mechanical vibrations, e.g. ultrasonic shock waves in direct contact with, or very close to, the obstruction or concrement the ultrasound transducer being outside patient's body; with an ultrasound transmission member; with a wave guide; with a vibrated guide wire
- A61B2017/22015—Implements for squeezing-off ulcers or the like on the inside of inner organs of the body; Implements for scraping-out cavities of body organs, e.g. bones; Calculus removers; Calculus smashing apparatus; Apparatus for removing obstructions in blood vessels, not otherwise provided for using mechanical vibrations, e.g. ultrasonic shock waves in direct contact with, or very close to, the obstruction or concrement the ultrasound transducer being outside patient's body; with an ultrasound transmission member; with a wave guide; with a vibrated guide wire with details of the transmission member
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods, e.g. tourniquets
- A61B17/32—Surgical cutting instruments
- A61B17/320068—Surgical cutting instruments using mechanical vibrations, e.g. ultrasonic
- A61B2017/320069—Surgical cutting instruments using mechanical vibrations, e.g. ultrasonic for ablating tissue
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods, e.g. tourniquets
- A61B17/32—Surgical cutting instruments
- A61B17/320068—Surgical cutting instruments using mechanical vibrations, e.g. ultrasonic
- A61B2017/320071—Surgical cutting instruments using mechanical vibrations, e.g. ultrasonic with articulating means for working tip
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods, e.g. tourniquets
- A61B17/32—Surgical cutting instruments
- A61B17/320068—Surgical cutting instruments using mechanical vibrations, e.g. ultrasonic
- A61B2017/320089—Surgical cutting instruments using mechanical vibrations, e.g. ultrasonic node location
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods, e.g. tourniquets
- A61B17/32—Surgical cutting instruments
- A61B17/320068—Surgical cutting instruments using mechanical vibrations, e.g. ultrasonic
- A61B17/320092—Surgical cutting instruments using mechanical vibrations, e.g. ultrasonic with additional movable means for clamping or cutting tissue, e.g. with a pivoting jaw
- A61B2017/320094—Surgical cutting instruments using mechanical vibrations, e.g. ultrasonic with additional movable means for clamping or cutting tissue, e.g. with a pivoting jaw additional movable means performing clamping operation
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B18/00—Surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body
- A61B2018/00315—Surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body for treatment of particular body parts
- A61B2018/00345—Vascular system
- A61B2018/00404—Blood vessels other than those in or around the heart
- A61B2018/00428—Severing
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B18/00—Surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body
- A61B2018/00571—Surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body for achieving a particular surgical effect
- A61B2018/00589—Coagulation
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B18/00—Surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body
- A61B2018/00994—Surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body combining two or more different kinds of non-mechanical energy or combining one or more non-mechanical energies with ultrasound
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B2217/00—General characteristics of surgical instruments
- A61B2217/002—Auxiliary appliance
- A61B2217/005—Auxiliary appliance with suction drainage system
Description
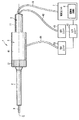
本発明の第1の実施形態について図1乃至図12を参照して説明する。図1は、本実施形態の超音波処置装置1を示す図である。なお、本実施形態の超音波処置装置1は、超音波振動によって発生したキャビテーションにより、生体組織を選択的に破砕及び切除し、切除された生体組織を吸引する超音波吸引装置である。
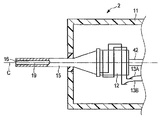
なお、第1の実施形態では、超音波処置装置1は、送水及び超音波振動によって発生したキャビテーションにより、生体組織を選択的に破砕及び切除し、切除された生体組織を吸引する超音波吸引のみを行うが、これに限るものではない。例えば第1の変形例として、図13に示すように、超音波プローブ3とジョー72との間で把持された血管等の生体組織の凝固切開が、超音波処置装置71により行われてよい。超音波処置装置71では、ハンドルユニット5は、固定ハンドル62、固定ハンドル62に対して開閉可能な可動ハンドル63を備える。また、シース4の先端部にジョー72が取付けられている。可動ハンドル63を固定ハンドル62に対して開閉することにより、シース4に設けられる可動部材(図示しない)が長手軸Cに沿って移動する。これにより、ジョー72が超音波プローブ3の先端部に対して開閉動作を行う。
次に、本発明の第2の実施形態について、図20及び図21を参照して説明する。第2の実施形態は、第1の実施形態の構成を次の通り変形したものである。なお、第1の実施形態と同一の部分については同一の符号を付して、その説明は省略する。
なお、第2の実施形態では、プローブ本体21の基端側接続部22に基端側溝部27が設けられているが、これに限るものではない。例えば、第1の変形例として図22に示すように、プローブ本体21の基端側接続部22が筒状に形成されてもよい。本変形例では、基端側接続部22の外周部30に雄ネジ部26が形成されている。また、プローブ本体21には、溝状部24が溝規定面25により規定されている。プローブ本体21にホーン15が連結された状態では、超音波振動の第1の腹位置A1からプローブ本体21の先端である超音波振動の第2の腹位置A2まで長手軸Cに沿って溝状部24が、溝規定面25により規定されている。
Claims (7)
- 超音波振動を伝達する超音波プローブであって、
基端から先端まで長手軸に沿って外周部が設けられるプローブ本体と、
前記超音波振動の第1の腹位置から前記第1の腹位置とは異なる前記超音波振動の第2の腹位置まで前記長手軸に沿って全長に亘って、前記プローブ本体の前記外周部において開口する空洞部を、前記長手軸に沿って規定する空洞規定面と、
を具備する超音波プローブ。 - 前記空洞部は、前記長手軸に垂直な第1の垂直方向から前記第1の垂直方向とは反対方向である第2の垂直方向に向かって延設され、
前記空洞規定面は、少なくとも第1の垂直方向側の端部が前記プローブ本体の前記外周部に連続する、
請求項1の超音波プローブ。 - 前記空洞部は、前記長手軸より前記第2の垂直方向側の部位まで前記第2の垂直方向に向かって延設されている請求項2の超音波プローブ。
- 前記空洞部に前記長手軸に沿って延設されるチューブと、
前記プローブ本体の前記先端が接続される筒状部であって、前記チューブの内部と連通する吸引通路を規定し、前記チューブの先端が接続される通路規定面を備える筒状部と、
をさらに具備する請求項1の超音波プローブ。 - 前記チューブの前記先端は、前記第2の腹位置より先端方向側に位置する前記超音波振動の節位置で前記通路規定面に接続されている請求項4の超音波プローブ。
- 前記筒状部は、前記チューブが挿通される挿通孔を規定し、前記筒状部の基端に位置する前記第2の腹位置から前記筒状部の前記基端と前記筒状部の先端との中間位置に位置する前記節位置まで前記長手軸に沿って設けられる孔規定面を備え、
前記通路規定面は、前記節位置から前記筒状部の前記先端に位置する第3の腹位置まで前記長手軸に沿って設けられ、
前記吸引通路の前記長手軸に垂直な断面積は、前記挿通孔の前記長手軸に垂直な断面積より小さい、
請求項5の超音波プローブ。 - 前記超音波プローブの先端面をコーティングする親水性コーティング部をさらに具備する、請求項1の超音波プローブ。
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| US201161447938P | 2011-03-01 | 2011-03-01 | |
| US61/447,938 | 2011-03-01 | ||
| PCT/JP2012/054802 WO2012118018A1 (ja) | 2011-03-01 | 2012-02-27 | 超音波プローブ |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP5249471B2 true JP5249471B2 (ja) | 2013-07-31 |
| JPWO2012118018A1 JPWO2012118018A1 (ja) | 2014-07-07 |
Family
ID=46757952
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2012549578A Active JP5249471B2 (ja) | 2011-03-01 | 2012-02-27 | 超音波プローブ |
Country Status (5)
| Country | Link |
|---|---|
| US (1) | US9427248B2 (ja) |
| EP (1) | EP2636382B1 (ja) |
| JP (1) | JP5249471B2 (ja) |
| CN (1) | CN103327920B (ja) |
| WO (1) | WO2012118018A1 (ja) |
Families Citing this family (12)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN103200888B (zh) * | 2011-03-28 | 2015-09-30 | 奥林巴斯医疗株式会社 | 超声波处理装置 |
| JP5485481B1 (ja) * | 2012-06-01 | 2014-05-07 | オリンパスメディカルシステムズ株式会社 | 超音波プローブ |
| US9173667B2 (en) | 2012-10-16 | 2015-11-03 | Med-Sonics Corporation | Apparatus and methods for transferring ultrasonic energy to a bodily tissue |
| WO2014065406A1 (ja) | 2012-10-25 | 2014-05-01 | オリンパスメディカルシステムズ株式会社 | 超音波プローブ |
| US9339284B2 (en) | 2012-11-06 | 2016-05-17 | Med-Sonics Corporation | Systems and methods for controlling delivery of ultrasonic energy to a bodily tissue |
| CN105813588A (zh) * | 2013-12-13 | 2016-07-27 | 奥林巴斯株式会社 | 处置器具以及处置系统 |
| WO2016009702A1 (ja) * | 2014-07-15 | 2016-01-21 | オリンパス株式会社 | 送液具及び処置装置 |
| CN106456227B (zh) * | 2015-01-07 | 2019-07-19 | 奥林巴斯株式会社 | 超声波探头及超声波处理器具 |
| US9763684B2 (en) | 2015-04-02 | 2017-09-19 | Med-Sonics Corporation | Devices and methods for removing occlusions from a bodily cavity |
| CN109982649B (zh) * | 2016-07-01 | 2022-09-16 | 天鹅细胞学股份有限公司 | 提取和递送实体的方法和装置 |
| US10368897B2 (en) * | 2017-02-09 | 2019-08-06 | Covidien Lp | Ultrasonic surgical instrument |
| US11432866B2 (en) * | 2019-02-04 | 2022-09-06 | Ik Ro Park | Electrosurgery smoke suction apparatus |
Citations (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH04212338A (ja) * | 1990-03-27 | 1992-08-03 | Olympus Optical Co Ltd | 超音波治療装置 |
| JP2001161705A (ja) * | 1999-12-09 | 2001-06-19 | Olympus Optical Co Ltd | 超音波処置装置 |
Family Cites Families (10)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US3433226A (en) * | 1965-07-21 | 1969-03-18 | Aeroprojects Inc | Vibratory catheterization apparatus and method of using |
| US4750488A (en) * | 1986-05-19 | 1988-06-14 | Sonomed Technology, Inc. | Vibration apparatus preferably for endoscopic ultrasonic aspirator |
| US5163433A (en) * | 1989-11-01 | 1992-11-17 | Olympus Optical Co., Ltd. | Ultrasound type treatment apparatus |
| US5391144A (en) | 1990-02-02 | 1995-02-21 | Olympus Optical Co., Ltd. | Ultrasonic treatment apparatus |
| US5595328A (en) * | 1994-12-23 | 1997-01-21 | Kulicke And Soffa Investments, Inc. | Self isolating ultrasonic transducer |
| WO1999044514A1 (en) * | 1998-03-02 | 1999-09-10 | Mentor Corporation | Ultrasonic liposuction probe |
| US20020077550A1 (en) * | 1999-10-05 | 2002-06-20 | Rabiner Robert A. | Apparatus and method for treating gynecological diseases using an ultrasonic medical device operating in a transverse mode |
| US20040158150A1 (en) * | 1999-10-05 | 2004-08-12 | Omnisonics Medical Technologies, Inc. | Apparatus and method for an ultrasonic medical device for tissue remodeling |
| US6875220B2 (en) * | 2002-12-30 | 2005-04-05 | Cybersonics, Inc. | Dual probe |
| JP2005027809A (ja) | 2003-07-10 | 2005-02-03 | Olympus Corp | 超音波手術装置 |
-
2012
- 2012-02-27 EP EP12752458.5A patent/EP2636382B1/en not_active Not-in-force
- 2012-02-27 JP JP2012549578A patent/JP5249471B2/ja active Active
- 2012-02-27 WO PCT/JP2012/054802 patent/WO2012118018A1/ja active Application Filing
- 2012-02-27 CN CN201280005786.5A patent/CN103327920B/zh active Active
- 2012-11-09 US US13/673,532 patent/US9427248B2/en active Active
Patent Citations (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH04212338A (ja) * | 1990-03-27 | 1992-08-03 | Olympus Optical Co Ltd | 超音波治療装置 |
| JP2001161705A (ja) * | 1999-12-09 | 2001-06-19 | Olympus Optical Co Ltd | 超音波処置装置 |
Also Published As
| Publication number | Publication date |
|---|---|
| US20130131705A1 (en) | 2013-05-23 |
| EP2636382B1 (en) | 2016-08-03 |
| JPWO2012118018A1 (ja) | 2014-07-07 |
| CN103327920B (zh) | 2015-12-02 |
| US9427248B2 (en) | 2016-08-30 |
| WO2012118018A1 (ja) | 2012-09-07 |
| EP2636382A4 (en) | 2014-03-26 |
| EP2636382A1 (en) | 2013-09-11 |
| CN103327920A (zh) | 2013-09-25 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5249471B2 (ja) | 超音波プローブ | |
| JP5274716B2 (ja) | バイポーラ処置装置 | |
| US9486235B2 (en) | Surgical device employing a cantilevered beam dissector | |
| US20160128769A1 (en) | Surgical device for the removal of tissue employing a vibrating beam with cold plasma sterilization | |
| US10639058B2 (en) | Ultrasonic surgical instrument with features for forming bubbles to enhance cavitation | |
| JP5167443B2 (ja) | 医療用送液装置 | |
| US8092475B2 (en) | Ultrasonic horn for removal of hard tissue | |
| US8142460B2 (en) | Bone abrading ultrasonic horns | |
| US8118823B2 (en) | Shear stress ultrasonic horn for ultrasonic surgical aspiration | |
| WO1987001575A1 (en) | Ultrasonic instrument for surgical operations | |
| WO2012132860A1 (ja) | 超音波処置装置 | |
| JP5385485B2 (ja) | 超音波処置装置及びプローブユニット | |
| US10736686B2 (en) | Surgical device employing a cantilevered beam dissector | |
| JP6022128B2 (ja) | エネルギー処置ユニット、エネルギー処置具及びエネルギー処置システム | |
| JP5478764B2 (ja) | 超音波プローブ及び超音波処置装置 | |
| JP5663706B2 (ja) | 超音波プローブ |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20130319 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20130411 |
|
| R151 | Written notification of patent or utility model registration |
Ref document number: 5249471 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R151 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20160419 Year of fee payment: 3 |
|
| S111 | Request for change of ownership or part of ownership |
Free format text: JAPANESE INTERMEDIATE CODE: R313111 |
|
| R350 | Written notification of registration of transfer |
Free format text: JAPANESE INTERMEDIATE CODE: R350 |
|
| S531 | Written request for registration of change of domicile |
Free format text: JAPANESE INTERMEDIATE CODE: R313531 |
|
| R350 | Written notification of registration of transfer |
Free format text: JAPANESE INTERMEDIATE CODE: R350 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |