JP5241306B2 - 自律移動装置 - Google Patents
自律移動装置 Download PDFInfo
- Publication number
- JP5241306B2 JP5241306B2 JP2008114664A JP2008114664A JP5241306B2 JP 5241306 B2 JP5241306 B2 JP 5241306B2 JP 2008114664 A JP2008114664 A JP 2008114664A JP 2008114664 A JP2008114664 A JP 2008114664A JP 5241306 B2 JP5241306 B2 JP 5241306B2
- Authority
- JP
- Japan
- Prior art keywords
- route
- distance
- temporary
- line segment
- autonomous mobile
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images


















Landscapes
- Control Of Position, Course, Altitude, Or Attitude Of Moving Bodies (AREA)
Description
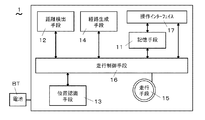
図1は本発明の第1の実施形態に係る自律移動装置のブロック構成を示し、図2は同装置によって塗り潰し移動が行われる閉領域を示し、図3(a)(b)(c)は同装置によって行われる塗り潰し移動の経路の例を示す。
図4は第2の実施形態に係る自律移動装置による塗り潰し移動の経路を示し、図5は同装置による物体の検出と経路生成を示し、図6は同装置による物体の検出と経路生成の他の例を示し、図7は同装置による物体の検出と経路生成のフローチャートを示す。
図8は第3の実施形態に係る自律移動装置による塗り潰し移動の経路と閉領域を示し、図9は同装置による仮目的地を設定する処理のフローチャートを示し、図10(a)は図9のフローチャートの一部を実行するプログラムを示し、図10(b)は(a)のプログラムにおける変数ifloorのグラフを示し、図10(c)は(a)のプログラムにおける変数imodのグラフを示し、図11は同装置による経路生成を位置ベクトルによって示す。
図12は第4の実施形態に係る自律移動装置による塗り潰し移動の経路を示す。本実施形態は、上述の第3の実施形態の閉領域20における仮目的地数m=6が、m=8に増加したものであり、仮目的地P0〜P7となった点を除いて、上記と同様である。従って、増加した仮目的地P6は、プログラムリストにおける「case 2」において算出され、仮目的地P7は、「case 3」において算出される。
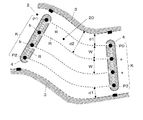
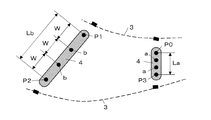
図13は第5の実施形態に係る自律移動装置による塗り潰し移動の経路と閉領域を示す。本実施形態は、上述の各実施形態において、2つの境界縁3が直線であって互いに一定距離を隔てて平行である場合について示すものであり、自律移動装置1の経路生成手段14は、境界縁3に平行な経路Rを形成するように追加の仮目的地a,bを設定する。この場合において、自律移動装置1は、既定の仮目的地としての領域定義点Pを与えられると共に、適切な追加の仮目的地を決定するための情報が与えられる。例えば、平行な境界縁3間の距離(垂直距離)および平行な経路Rを形成する旨の指示が与えられる。自律移動装置1は、この垂直距離と掃引幅Wに基づいて、追加の仮目的地を決定することができる。他の方法として、自律移動装置1が、自ら、領域定義点Pの4点の座標と地図情報とから閉領域20が平行な境界縁3を有することを判断して垂直距離を算出するようにしてもよい。
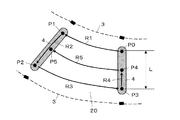
図14は第6の実施形態に係る自律移動装置による塗り潰し移動の経路と閉領域を示す。本実施形態は、上述の第1乃至第4の各実施形態において、2つの境界縁3が直線ではない場合であって互いに一定距離を隔てて対向している場合(2つの境界縁3が各局所局所において平行となっている)について示すものであり、自律移動装置1の経路生成手段14は、境界縁3に平行な経路Rを形成するように追加の仮目的地a,bを設定する。本実施形態では、境界縁3が直線とは限らないので、上述の第5の実施形態とは異なり、境界縁3間の距離(垂直距離)を与えるのが好ましい。他の方法として、領域定義点Pによって定まる線分4が各境界縁3に垂直となるように領域定義点Pを設定すれば、適切な仮目的地と経路Rを生成することができる。
図15は第7の実施形態に係る自律移動装置が塗り潰し移動を行う閉領域を示し、図16は図15の閉領域における塗り潰し移動の経路を示す。
図17は第8の実施形態に係る自律移動装置が塗り潰し移動を行う閉領域を示す。本実施形態は、第1の実施形態の閉領域20における互いに対向する2つの線分4の長さが異なる場合について示すものであり、自律移動装置1の経路生成手段14は、互いに対向する2つの線分4のうち、より長い方の線分4に沿って設定した仮目的地、より詳しくは、その仮目的地を設定する際に算出した仮目的地数mに基づいて他方の線分4の仮目的地を設定するものである。
図18は第9の実施形態に係る自律移動装置による塗り潰し移動の経路と閉領域を示す。本実施形態は、閉領域20が、領域定義点Pを2点用いるものであり、湾曲する1つの境界縁3と、境界縁3の両端部の近くに設定された領域定義点P0,P1を結ぶ1つの線分4とで設定されている場合について示すものである。この場合の塗潰用の移動経路は、結果的に、1つしかない線分4の中心側から外側に向けて、または、外側から中心側に向けて、当該線分の中心に対して互いに反対側に位置する仮目的地を交互に経由するような経路となる。
図19は第10の実施形態に係る自律移動装置による塗り潰し移動の経路と閉領域を示す。本実施形態は、第1、第2の実施形態におけるように対向する2つの境界縁3がある場合であって、一方の境界縁3に沿って一定間隔を保ちながら移動する経路Rが、現在注目している当該境界縁3よりも他方の境界縁3の方に近づく場合には、両方の境界縁3との距離が等しくなる経路を生成する経路生成について示すものである。
図20は第11の実施形態に係る自律移動装置による塗り潰し移動の経路と閉領域を示す。本実施形態は、線分4上の移動ではなく閉領域20内から移動して仮目的地に近づいたとき、または、逆に仮目的地から閉領域20の内部に移動するときの処理を説明するものである。自律移動装置1は、仮目的地b1から仮目的地a1に向かって境界縁3との距離d2を保って経路Rに沿って移動し、仮目的地a1から所定範囲De内に近づいた地点c1以降は、境界縁3から一定の距離を保ちつつ境界縁3に沿って移動する経路Rに代えて、仮目的地a1に直接すなわち直線的に向かう経路R2に沿って移動する。このような経路R2は、経路Rと同様に、自律移動装置1の経路生成手段14が生成する。
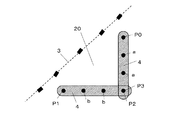
図21は第12の実施形態に係る自律移動装置による塗り潰し移動の経路と閉領域を示す。本実施形態は、閉領域20が、1つの境界縁3と、4つの領域定義点P0〜P3を端点とする第1乃至第3の3つの線分4とで設定されている場合について示すものである。第1および第2の線分4は互いに対向しており、その各一端部は境界縁3側にあり、各他端部は、第3の線分4の両端部側にある。つまり、本実施形態の閉領域20は、第1の実施形態(図2)に示した閉領域20において、2つの境界縁3の1つの境界縁3を第3の線分4に置き換えたものとなっている。
図22は第13の実施形態に係る自律移動装置による塗り潰し移動の経路と閉領域を示す。本実施形態は、閉領域20が、2つの互いに対向する境界縁3と、境界縁3の端部を結ぶ2つの線分4と、2つの境界縁3の中程を結ぶ線分4からなる3つの線分4とによって設定されている場合について示すものである。
図23は第14の実施形態に係る自律移動装置が塗り潰し移動を行う複数の閉領域を含む走行領域を示す。本実施形態は、上述した第1乃至第12の実施形態における閉領域の例を含む具体的な走行領域の例2を説明するものである。本図は、複数の店舗が設けられている建物内のフロアを示しており、各店舗部分と吹き抜け部分を除いた領域が走行領域2となっている。走行領域2の境界は、点線で示した店舗境界、実線で示した吹き抜け部分の境界、および建物の外壁等で構成されている。境界には、太い実践で示した実障害物が散在している。これらの実障害物、吹き抜け部分の境界、および建物の外壁は、自律移動装置1が、距離検出手段12によって検出して自己位置を参照できる物理的な境界であって、閉領域を設定する境界縁とされる。
2 走行領域
3 境界縁
4 線分
11 記憶手段
12 距離検出手段
13 位置認識手段
14 経路生成手段
15 走行手段
16 走行制御手段
20 閉領域
A〜F 閉領域
a,a1,a2,b,b1,b2,c 仮目的地
K 仮目的地
M 物体
P,P0〜P5 領域定義点
P0〜P7 仮目的地
R,R1〜R7 経路
W 掃引幅
Claims (8)
- 目的地の情報を含む走行のための各種パラメータおよび走行領域の地図を記憶する記憶手段と、周囲の物体との距離を検出する距離検出手段と、前記地図上における自己位置を取得する位置認識手段と、前記地図上における自己位置および記憶手段に記憶された目的地をもとに走行するための経路を生成する経路生成手段と、走行のための走行手段と、前記位置認識手段により自己位置を認識するとともに前記経路生成手段の生成した経路に基づいて前記走行手段を制御して前記目的地まで走行する走行制御手段と、を備え、前記走行領域に設定された閉領域を所定の掃引幅で走行して塗り潰す自律移動装置において、
前記閉領域は、該閉領域の端部にある少なくとも4つの領域定義点によって設定され、
前記経路生成手段は、前記閉領域を前記掃引幅で走行して塗り潰すように、隣り合う領域定義点を結ぶ互いに対向する2つの線分にそれぞれ該線分を前記掃引幅に基づいて分割した分割点を仮目的地として設定すると共に、前記一方の線分における仮目的地と他方の線分における仮目的地とを順次接続して経路を生成し、前記一方の線分における仮目的地と他方の線分における仮目的地とを接続する経路を、直線的に移動する経路とするか、または前記距離検出手段によって周囲の物体との距離を検出して物体との距離を一定に保ちつつ移動する経路とするかが予め設定されていることを特徴とする自律移動装置。 - 前記経路生成手段は、前記2つの線分のうち長い方の線分において設定した仮目的地数に基づいて他方の線分における仮目的地を設定することを特徴とする請求項1に記載の自律移動装置。
- 前記経路生成手段は、前記一方の線分における仮目的地と他方の線分における仮目的地とを接続する経路と、1つの線分内の2つの仮目的地間を移動する経路とを組み合わせて、当該閉領域を渦巻状に外側から内側に向けてまたは内側から外側に向けて移動する経路を順次生成することを特徴とする請求項1または請求項2に記載の自律移動装置。
- 前記経路生成手段は、前記一方の線分における仮目的地と他方の線分における仮目的地とを接続する経路と、1つの線分内の2つの仮目的地間を移動する経路とを組み合わせて、前記線分の一端側から他端側に向けて順次移動する経路を順次生成することを特徴とする請求項1または請求項2に記載の自律移動装置。
- 前記距離検出手段によって周囲の物体との距離を検出して物体との距離を一定に保ちつつ移動する経路を生成するように設定されている場合に、
前記経路生成手段は、経路から物体までの距離を、より外側の経路から物体までの距離に前記掃引幅を加えた距離とすることを特徴とする請求項3または請求項4に記載の自律移動装置。 - 前記経路生成手段は、周囲の物体との距離を一定に保ちつつ移動する経路を生成する際に、距離を一定に保っている物体がある側とは移動方向反対側にある物体の方が近くなる場合には両側の物体との距離が等しくなる経路を生成することを特徴とする請求項5に記載の自律移動装置。
- 前記経路生成手段は、前記仮目的地から所定範囲内においては、周囲の物体との距離を保ちつつ移動する経路に代えて当該仮目的地に直線的に接続する経路を生成することを特徴とする請求項5に記載の自律移動装置。
- 前記経路生成手段は、前記2つの線分のうち長い方の線分を前記掃引幅に基づいて分割し、その分割点を仮目的地として設定する際に、前記長い方の線分の長さを前記掃引幅で割り算して商を求め、前記商を整数となるように切り上げた整数値を該線分を分割するための分割数とすることを特徴とする請求項2に記載の自律移動装置。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2008114664A JP5241306B2 (ja) | 2008-04-24 | 2008-04-24 | 自律移動装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2008114664A JP5241306B2 (ja) | 2008-04-24 | 2008-04-24 | 自律移動装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2009265941A JP2009265941A (ja) | 2009-11-12 |
| JP5241306B2 true JP5241306B2 (ja) | 2013-07-17 |
Family
ID=41391716
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2008114664A Active JP5241306B2 (ja) | 2008-04-24 | 2008-04-24 | 自律移動装置 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP5241306B2 (ja) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2020073168A1 (zh) * | 2018-10-08 | 2020-04-16 | 苏州金瑞麒智能科技有限公司 | 一种轮椅控制方法及系统 |
Families Citing this family (11)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US9868211B2 (en) | 2015-04-09 | 2018-01-16 | Irobot Corporation | Restricting movement of a mobile robot |
| JP6619967B2 (ja) * | 2015-08-21 | 2019-12-11 | シャープ株式会社 | 自律移動装置、自律移動システム及び環境地図評価方法 |
| JP6824866B2 (ja) * | 2017-12-19 | 2021-02-03 | 株式会社クボタ | 草刈機自動走行システム |
| US11696525B2 (en) | 2017-12-19 | 2023-07-11 | Kubota Corporation | Automatic travel work machine, automatic travel grass mower, grass mower, and grass mower automatic travel system |
| JP7100450B2 (ja) * | 2017-12-26 | 2022-07-13 | アマノ株式会社 | 操作装置、情報作成方法、プログラムおよび自律走行作業装置 |
| CN108748145B (zh) * | 2018-05-29 | 2021-07-09 | 华瑞(江苏)燃机服务有限公司 | 一种燃气轮机部件曲面喷涂轨迹算法 |
| US12185662B2 (en) | 2018-11-20 | 2025-01-07 | Honda Motor Co., Ltd. | Control apparatus of autonomously navigating work machine |
| CN112286175A (zh) * | 2019-07-09 | 2021-01-29 | 苏州宝时得电动工具有限公司 | 自动工作系统、智能扫雪机器人及其控制方法 |
| JP2023155919A (ja) * | 2020-09-08 | 2023-10-24 | 村田機械株式会社 | 走行領域決定方法及び自律走行体 |
| CN114690761A (zh) * | 2020-12-31 | 2022-07-01 | 华为技术有限公司 | 一种机器人的位置校正方法以及相关设备 |
| CN115493581B (zh) * | 2022-09-26 | 2025-03-25 | 上海擎朗智能科技有限公司 | 机器人移动地图生成方法、装置、设备及存储介质 |
Family Cites Families (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH0774973B2 (ja) * | 1989-12-28 | 1995-08-09 | 本田技研工業株式会社 | 自走車の操向制御装置 |
| JPH05165517A (ja) * | 1991-12-11 | 1993-07-02 | Nippon Yusoki Co Ltd | 無人作業車の制御方法 |
| JPH06149364A (ja) * | 1992-11-06 | 1994-05-27 | Fujitsu General Ltd | 無人走行車の制御装置 |
| JP2003036116A (ja) * | 2001-07-25 | 2003-02-07 | Toshiba Tec Corp | 自律走行ロボット |
| JP4462156B2 (ja) * | 2005-03-15 | 2010-05-12 | パナソニック電工株式会社 | 自律移動装置 |
| JP2007330567A (ja) * | 2006-06-16 | 2007-12-27 | Hitachi Appliances Inc | 自走式掃除機 |
-
2008
- 2008-04-24 JP JP2008114664A patent/JP5241306B2/ja active Active
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2020073168A1 (zh) * | 2018-10-08 | 2020-04-16 | 苏州金瑞麒智能科技有限公司 | 一种轮椅控制方法及系统 |
Also Published As
| Publication number | Publication date |
|---|---|
| JP2009265941A (ja) | 2009-11-12 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5241306B2 (ja) | 自律移動装置 | |
| Shah et al. | Ving: Learning open-world navigation with visual goals | |
| KR101372482B1 (ko) | 이동 로봇의 경로 계획 방법 및 장치 | |
| WO2024111453A1 (en) | Autonomous mapping by a mobile robot | |
| JP5361257B2 (ja) | 自律移動装置 | |
| EP2821876A2 (en) | Route planning method, route planning unit, and autonomous mobile device | |
| CN107894773A (zh) | 一种移动机器人的导航方法、系统及相关装置 | |
| Bogdan Rusu et al. | Leaving Flatland: Efficient real‐time three‐dimensional perception and motion planning | |
| Al-Dahhan et al. | Voronoi boundary visibility for efficient path planning | |
| AU2024202853A1 (en) | Path planning within a traversed area | |
| Elbanhawi et al. | Randomised kinodynamic motion planning for an autonomous vehicle in semi-structured agricultural areas | |
| Hasegawa et al. | Experimental verification of path planning with SLAM | |
| Bhargava et al. | A review of recent advances, techniques, and control algorithms for automated guided vehicle systems | |
| JP2010026727A (ja) | 自律移動装置 | |
| Reda et al. | A novel reinforcement learning-based multi-operator differential evolution with cubic spline for the path planning problem | |
| Wu et al. | Real-time three-dimensional smooth path planning for unmanned aerial vehicles in completely unknown cluttered environments | |
| JP4462156B2 (ja) | 自律移動装置 | |
| EP4012338A1 (en) | Guiding a motor vehicle based on a camera image and a navigational command | |
| Atas et al. | Navigating in 3d uneven environments through supervoxels and nonlinear mpc | |
| Gottlieb et al. | Multi-target motion planning amidst obstacles for autonomous aerial and ground vehicles | |
| CN115164903B (zh) | 基于局部路径点生成的分层无地图导航方法及装置 | |
| Masehian et al. | NRR: a nonholonomic random replanner for navigation of car-like robots in unknown environments | |
| Rajchandar et al. | An Approach to Improve Multi objective Path Planning for Mobile Robot Navigation using the Novel Quadrant Selection Method | |
| Copot et al. | Collision-free path planning in indoor environment using a quadrotor | |
| Akmandor et al. | Reactive navigation framework for mobile robots by heuristically evaluated pre-sampled trajectories |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20101118 |
|
| A711 | Notification of change in applicant |
Free format text: JAPANESE INTERMEDIATE CODE: A712 Effective date: 20120111 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20120223 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20120327 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20120528 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20121218 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20130213 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20130312 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20130402 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20160412 Year of fee payment: 3 |
|
| R150 | Certificate of patent or registration of utility model |
Free format text: JAPANESE INTERMEDIATE CODE: R150 Ref document number: 5241306 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |