JP5178652B2 - 車両の走行安全装置 - Google Patents
車両の走行安全装置 Download PDFInfo
- Publication number
- JP5178652B2 JP5178652B2 JP2009163594A JP2009163594A JP5178652B2 JP 5178652 B2 JP5178652 B2 JP 5178652B2 JP 2009163594 A JP2009163594 A JP 2009163594A JP 2009163594 A JP2009163594 A JP 2009163594A JP 5178652 B2 JP5178652 B2 JP 5178652B2
- Authority
- JP
- Japan
- Prior art keywords
- vehicle
- course
- length
- crossing
- intersecting
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
Images



Landscapes
- Traffic Control Systems (AREA)
- Control Of Driving Devices And Active Controlling Of Vehicle (AREA)
- Regulating Braking Force (AREA)
Description
本発明は上記事情に鑑みてなされたもので、自車両と他車両との衝突可能性の有無を精度良く判定することが可能な車両の走行安全装置を提供することを目的としている。
本実施の形態による車両の走行安全装置10は、例えば図1に示すように、内燃機関(E)の駆動力をトランスミッション(T/M)を介して車両の駆動輪(図示略)に伝達する車両に搭載され、外界センサ11と、車両状態センサ12と、処理装置13と、スロットルアクチュエータ14と、ブレーキアクチュエータ15と、ステアリングアクチュエータ16と、報知装置17とを備えて構成されている。
例えばレーダ装置は、自車両の外界に設定された検出対象領域(例えば、右前方と左前方となど)を複数の角度領域に分割し、各角度領域を走査するようにして、電磁波の発信信号を発信する。そして、各発信信号が自車両の外部の物体(例えば、他車両や構造物など)によって反射されることで生じた反射信号を受信し、レーダ装置から外部の物体までの距離に係る検知信号を生成し、処理装置13に出力する。
また、例えば撮像装置は、自車両の外界に設定された撮像領域(例えば、右前方と左前方となど)をカメラにより撮像して得た画像に画像処理を行なって画像データを生成し、処理装置13に出力する。
交差車両検出部32は、例えば外界センサ11のレーダ装置から出力される検知信号などに基づき、自車進路予測部31により予測された自車両の進路と交差する進行方向で自車両に接近するように移動する他車両(接近交差車両)を検出する。
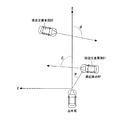
例えば図2に示すように、自車位置A1から自車位置A2まで移動する自車両に対して、自車両に向かい接近するようにして他車位置B1から他車位置B4まで移動する接近交差車両では、各他車位置B1,…,B4毎に自車両に最も近い反射点から、各代表点b1,…,b4が算出される。そして、各代表点b1,…,b4により、接近交差車両の予測進路(補正前)RB0が算出される。
この側面長さLBは、例えば画像データから抽出された接近交差車両の輪郭形状の接近交差車両の進行方向での長さなどであり、例えば図2に示す接近交差車両では、各他車位置B1,…,B4毎に各側面長さLB1,…,LB4が検出される。
なお、側面長さLBは、例えば外界センサ11のレーダ装置から逐次出力される検知信号に基づき検出されてもよく、この場合には、複数の反射点から検知される接近交差車両の輪郭形状の接近交差車両の進行方向での長さなどとなる。
例えば基準値算出部36は、下記表1に示すように、予め設定された基準値LBmの所定のマップなどを記憶しており、このマップに対するマップ検索により基準値LBmを算出する。なお、下記表1に示す所定のマップは、例えば接近交差車両の方位角θと、自車両と接近交差車両との間の距離と、接近交差車両の位置の角度Pと、基準値LBmとの対応関係を示している。接近交差車両の方位角θは、自車両の進行方向(X方向)に対して接近交差車両の進行方向がなす角度であって、例えば図3に示す各接近交差車両B1,B2の方位角θ1,θ2である。自車両と接近交差車両との間の距離は、例えば、図3に示す接近交差車両B1の表面上での自車両に最も近い点(最近接点NP)と自車両との間の距離である。接近交差車両の位置の角度Pは、自車両の位置と接近交差車両の位置とを結ぶ直線が自車両の進行方向(X方向)に対してなす角度であって、例えば自車両と接近交差車両の最近接点NPとを結ぶ線分が自車両の進行方向(X方向)に対してなす角度である。

例えば交差車進路補正部38は、側面長さ検出部34により検出された接近交差車両の側面長さLBと基準値算出部36により算出された基準値LBmとの差分値ΔLB(=LB−LBm)と、車体色検出部37により検出された接近交差車両の車体色に応じた所定の進行方向補正係数αとにより、接近交差車両の進行方向角度(方位角)θを補正し、補正後の進行方向角度(方位角)θ´(=θ+α×ΔLB)を算出する。そして、補正後の進行方向角度(方位角)θ´に応じて、接近交差車両の進路を補正する。
また、進行方向補正係数αは、例えば下記表2に示すように、左側通行の通行区分において、接近交差車両が自車両の左側から右側に向い進行している場合に正の符号を有し、接近交差車両が自車両の右側から左側に向い進行している場合に負の符号を有している。
また、例えば、自車両の右側から左側に向い進行する接近交差車両の車体色が黒色である場合には、進行方向補正係数α=−0.5となり、例えば、側面長さLB=2mと、基準値LBm=1mと、進行方向角度(方位角)θ=90degとに対して、補正後の進行方向角度(方位角)θ´=90−0.5×(2−1)=89.5degとなる。
なお、変化率ΔLは、接近交差車両の側面長さLBの単位時間当たりの変化率であり、この変化率ΔLの絶対値が所定絶対値(つまり、自車両から離れる方向に対する変化率上限閾値ΔLth+の絶対値|ΔLth+|と自車両に近づく方向に対する変化率下限閾値ΔLth−の絶対値|ΔLth−|)よりも大きい場合には、接近交差車両は車線変更を行なっていると判定される。
また、車両制御部41は、自車両の乗員に各種の情報を報知する場合に、報知装置17を制御する制御信号を出力する。
触覚的伝達装置は、例えばシートベルト装置や操舵制御装置などであって、車両制御部41から出力される制御信号に応じて、例えばシートベルトに所定の張力を発生させて自車両の乗員が触覚的に知覚可能な締め付け力を作用させたり、例えばステアリングホイールに自車両の運転者が触覚的に知覚可能な振動(ステアリング振動)を発生させることによって、接近交差車両との衝突発生の可能性があることを乗員に認識させる。
視覚的伝達装置は、例えば表示装置などであって、車両制御部41から入力される制御信号に応じて、例えば表示装置に所定の警報情報を表示したり、所定の警報灯を点滅させることによって、接近交差車両との衝突発生の可能性があることを乗員に認識させる。
聴覚的伝達装置は、例えばスピーカなどであって、車両制御部41から入力される制御信号に応じて所定の警報音や音声などを出力することによって、接近交差車両との衝突発生の可能性があることを乗員に認識させる。
この判定結果が「NO」の場合には、エンドに進む。
一方、この判定結果が「YES」の場合には、ステップS02に進む。
次に、ステップS02においては、自車両の進路と交差する進行方向で自車両に接近するように移動する接近交差車両を検出し、この接近交差車両の車体色を検出する。
次に、ステップS04においては、予め作成された所定のマップをマップ検索して基準値LBmを算出する。そして、外界センサ11の撮像装置から出力される画像データなどに基づき、接近交差車両の側面長さLBを検出する。そして、接近交差車両の側面長さLBと基準値LBmとの差分値ΔLB(=LB−LBm)を算出する。
この判定結果が「NO」の場合には、ステップS08に進む。
一方、この判定結果が「YES」の場合には、ステップS07に進む。
そして、ステップS07においては、接近交差車両が車線変更の実行中であると判定し、接近交差車両の走行情報を更新する。
そして、ステップS09においては、自車両の進路と接近交差車両の進路とに基づき、例えば衝突回避に要する減速度などを考慮して、自車両と接近交差車両との衝突可能性の有無を判定する。
この判定結果が「NO」の場合には、上述したステップS01に戻る。
一方、この判定結果が「YES」の場合には、ステップS10に進む。
そして、ステップS10においては、警報の報知や自車両の走行状態などを制御する衝突回避制御を実行し、エンドに進む。
さらに、接近交差車両の車体色に応じた電磁波(レーダ装置から発信される赤外光レーザなど)の反射率の違いを接近交差車両の進路予測に反映させることができ、接近交差車両の進路予測の信頼性を向上させることができ、自車両と接近交差車両との衝突可能性の有無の判定精度を向上させることができる。
11 外界センサ
12 車両状態センサ
17 報知装置
31 自車進路予測部(自車進路予測手段)
32 交差車両検出部(交差車両検出手段)
33 交差車進路予測部(交差車進路予測手段)
34 側面長さ検出部(側面長さ検出手段)
35 相対位置検出部(相対位置検出手段)
36 基準値算出部(算出手段)
37 車体色検出部(車体色検出手段)
38 交差車進路補正部(補正手段、長さ変化検出手段、車線変更判定手段)
40 衝突可能性判定部(衝突可能性判定手段)
Claims (6)
- 自車両の進行方向に基づき自車両の進路を予測する自車進路予測手段と、
前記自車進路予測手段により予測された前記自車両の進路と交差する進行方向で移動する交差車両を検出する交差車両検出手段と、
前記交差車両検出手段により検出された前記交差車両の進行方向に基づいて、該交差車両の進路を予測する交差車進路予測手段と、
前記自車進路予測手段により予測された前記自車両の進路と前記交差車進路予測手段により予測された前記交差車両の進路とに基づいて、自車両と交差車両との衝突可能性の有無を判定する衝突可能性判定手段と、
前記自車両が位置する地点において該自車両によって認識される前記交差車両の側面の長さを検出する側面長さ検出手段と、
前記側面長さ検出手段により検出された前記側面の長さに基づいて、前記交差車進路予測手段により予測された前記交差車両の進路を補正する補正手段とを備え、
前記衝突可能性判定手段は、前記補正手段により補正された前記交差車両の進路に基づいて、前記衝突可能性の有無を判定することを特徴とする車両の走行安全装置。 - 前記自車両に対する前記交差車両の相対位置を検出する相対位置検出手段と、
前記交差車両検出手段により検出された前記交差車両の進行方向と前記相対位置検出手段により検出された前記相対位置とに基づいて、前記自車両が位置する地点において該自車両によって認識されるべき前記交差車両の側面の長さの基準値を算出する算出手段とを備え、
前記補正手段は、前記側面長さ検出手段により検出された側面の長さと前記算出手段により算出された前記基準値との差分値に基づいて、前記交差車進路予測手段により予測された前記交差車両の進路を補正することを特徴とする請求項1に記載の車両の走行安全装置。 - 前記補正手段は、
前記側面長さ検出手段により検出された側面の長さが、前記算出手段により算出された前記基準値よりも長い場合に、前記交差車進路予測手段により予測された前記交差車両の進路を、自車両から遠ざかる方向に補正し、
前記側面長さ検出手段により検出された側面の長さが、前記算出手段により算出された前記基準値よりも短い場合に、前記交差車進路予測手段により予測された前記交差車両の進路を、自車両に近づく方向に補正する
ことを特徴とする請求項2に記載の車両の走行安全装置。 - 前記側面長さ検出手段により検出された側面の長さの時間的な変化率を検出する長さ変化検出手段と、
前記長さ変化検出手段により検出された前記側面の長さの時間的な変化率の絶対値が所定値よりも大きい場合に、前記交差車両が車線変更を行なっていると判定する車線変更判定手段とを備え、
前記補正手段は、前記車線変更判定手段による判定結果に基づいて、前記交差車進路予測手段により予測された前記交差車両の進路を補正することを特徴とする請求項1から請求項3の何れか1つに記載の車両の走行安全装置。 - 前記車線変更判定手段は、
前記長さ変化検出手段により検出された前記側面の長さの時間的な変化率が所定の上限閾値よりも大きい場合に、前記交差車両が自車両から遠ざかる方向に車線変更を行なっていると判定し、
前記長さ変化検出手段により検出された前記側面の長さの時間的な変化率が所定の下限閾値よりも小さい場合に、前記交差車両が自車両に近づく方向に車線変更を行なっていると判定する
ことを特徴とする請求項4に記載の車両の走行安全装置。 - 前記交差車両の車体色を検出する車体色検出手段を備え、
前記補正手段は、前記車体色検出手段により検出された前記車体色に応じて、前記補正の度合いを変更することを特徴とする請求項1から請求項5の何れか1つに記載の車両の走行安全装置。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2009163594A JP5178652B2 (ja) | 2009-07-10 | 2009-07-10 | 車両の走行安全装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2009163594A JP5178652B2 (ja) | 2009-07-10 | 2009-07-10 | 車両の走行安全装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2011016486A JP2011016486A (ja) | 2011-01-27 |
| JP5178652B2 true JP5178652B2 (ja) | 2013-04-10 |
Family
ID=43594633
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2009163594A Expired - Fee Related JP5178652B2 (ja) | 2009-07-10 | 2009-07-10 | 車両の走行安全装置 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP5178652B2 (ja) |
Families Citing this family (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP5658130B2 (ja) * | 2011-12-20 | 2015-01-21 | 本田技研工業株式会社 | 車両の運転支援装置 |
| US8706393B2 (en) * | 2012-01-10 | 2014-04-22 | Ford Global Technologies, Llc | Intersection collision avoidance with adaptable vehicle dimensions |
| US10011277B2 (en) * | 2016-06-02 | 2018-07-03 | Ford Global Technologies, Llc | Vehicle collision avoidance |
Family Cites Families (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2004145479A (ja) * | 2002-10-22 | 2004-05-20 | Aisin Seiki Co Ltd | 周辺車両情報提供装置 |
| JP2005254835A (ja) * | 2004-03-09 | 2005-09-22 | Hitachi Ltd | 車両の走行制御装置及び車両制御ユニット |
-
2009
- 2009-07-10 JP JP2009163594A patent/JP5178652B2/ja not_active Expired - Fee Related
Also Published As
| Publication number | Publication date |
|---|---|
| JP2011016486A (ja) | 2011-01-27 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US11738744B2 (en) | Driving support apparatus | |
| JP4602277B2 (ja) | 衝突判定装置 | |
| CN103328299B (zh) | 自适应巡航控制及用于控制装备有自适应巡航控制系统的机动车辆的速度的方法 | |
| JP4914787B2 (ja) | 車両用物体検知装置 | |
| US20190073540A1 (en) | Vehicle control device, vehicle control method, and storage medium | |
| US20170003683A1 (en) | Automatic driving control device | |
| US20150353078A1 (en) | Driving assistance apparatus | |
| US20080243389A1 (en) | Vehicle Collision Avoidance Equipment and Method | |
| CN106796758B (zh) | 障碍物警报装置 | |
| JP6647681B2 (ja) | 車両制御装置 | |
| JP2010261897A (ja) | 車両用物体検知装置 | |
| JP5139744B2 (ja) | 車両用物体検知装置 | |
| JP2011018165A (ja) | 車両の走行安全装置 | |
| JP2010218377A (ja) | 車両制御装置 | |
| JP5055169B2 (ja) | 車両用走行安全装置 | |
| JP5396142B2 (ja) | 車両の走行安全装置 | |
| JP5178652B2 (ja) | 車両の走行安全装置 | |
| JP4442520B2 (ja) | 車両用進路推定装置 | |
| JP6609292B2 (ja) | 車外環境認識装置 | |
| JP2011018166A (ja) | 車両の走行安全装置 | |
| WO2020137747A1 (ja) | 運転支援装置 | |
| JP4971222B2 (ja) | 車両用走行安全装置 | |
| KR101511864B1 (ko) | 적응형 순항제어장치 및 그 제어방법 | |
| EP3413082B1 (en) | A vehicle system for detection of oncoming vehicles | |
| JP2010157181A (ja) | 車両の走行安全装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20111125 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20120522 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20121211 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20130108 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 5178652 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| LAPS | Cancellation because of no payment of annual fees |