以下に、本発明を実施するために最良の形態について、図面を参照しながら詳しく説明する。なお、同一の構成要素には同一の参照番号を付して、説明を省略する。
図1は、レーザビームプリンタの構成を示す図である。図1に示すように、レーザプリンタ100は、一般的に複数の構成部品から構成されるが、以下、本実施形態に係る部品についてのみ、参照番号を付して説明する。このレーザプリンタ100は、記録紙Pを収納するデッキ101を含んでいる。デッキ紙有無センサ102によって、デッキ101内の記録紙Pの有無が検知され、紙サイズ検知センサ103によって、デッキ101内の記録紙Pのサイズが検知される。記録紙Pは、ピックアップローラ104によって、デッキ101から繰り出され、デッキ給紙ローラ105によって、搬送される。リタードローラ106は、デッキ給紙ローラ105と対をなし、記録紙Pの重送を防止する。
デッキ給紙ローラ105の下流に給紙センサ107が設けられ、両面反転部からの給紙搬送状態が検知される。記録紙Pは、給紙搬送ローラ108を介し、レジストローラ対109によって、印刷タイミングと同期して搬送される。また、レジ前センサ110によって、レジストローラ対109への記録紙Pの搬送状態が検知される。レジストローラ対109の下流には、プロセスカートリッジ112が設けられていて、レーザスキャナ部111からのレーザ光に基づいて、感光ドラム1上にトナー像が形成される。
また、ローラ部材113(以下、転写ローラという)によって、感光ドラム1上に形成されたトナー像が、記録紙P上に転写され、放電部材114(以下、除電針という)によって、記録紙P上の電荷が除去されて感光ドラム1からの分離が促進される。搬送ガイド115を介して除電針114の下流に搬送された記録紙Pは、定着装置116によって、記録紙P上に転写されたトナー像が熱定着される。更に、定着装置116から搬送されてきた記録紙Pは、両面フラッパ120によって、排紙部又は両面反転部のいずれかに搬送される。
記録紙Pが排紙部に搬送されると、定着排紙センサ119によって、定着装置116からの搬送状態が検知され、排紙センサ121によって、排紙部における紙搬送状態が検知される。また、排紙ローラ対122によって、記録紙Pが排紙される。一方、記録紙Pが両面反転部に搬送されると、記録紙Pの両面に印字するために、片面印字終了後の記録紙Pが表裏反転する。両面反転部は、記録紙Pを再度、給紙搬送ローラ108側に給紙する。記録紙Pは、反転ローラ対123によって、正逆転しスイッチバックする。反転センサ124によって、反転ローラ対123への紙搬送状態が検知される。記録紙Pは、Dカットローラ125によって、記録紙Pの横方向位置を合わせるための図示されていない横方向レジスト部から搬送される。記録紙Pは、更に、両面搬送ローラ対127によって、両面反転部から給紙搬送ローラ108側に搬送される。また、両面センサ126によって、両面反転部の記録紙Pの搬送状態が検知される。
図2は、図1に示す加圧ローラ202を含む定着装置116の側面図である。定着装置116は、一般的なフィルム加熱方式の定着装置であり、定着フィルム201と、剛体ステー204と、例えば、セラミックヒータ205である電気発熱手段とを含んでいて、加圧ローラ202と対向配置されている。定着フィルム201は、円筒状の耐熱性フィルム材であり、セラミックヒータ205を取り付けた剛体ステー204に、ルーズに外嵌させてある。定着フィルム201として、例えば、耐熱性、離型性、強度性、耐久性等を有する厚さ40〜100μm程度のPTFE、PFA、FEP等の円筒状単層フィルムが用いられる。又は、ポリイミド、ポリアミド、PEEK、PES、PPS等の円筒状フィルムの外周面にPTFE、PFA、FEP等がコーティングされた複合層フィルムが用いられても良い。
加圧ローラ202は、芯金203の外周にシリコーンゴム等の耐熱性弾性層207をローラ状に同心一体に設けることにより構成された弾性ローラである。定着フィルム201は、加圧ローラ202と、セラミックヒータ205との間に挟まれ、加圧ローラ202の弾性に抗して圧接している。また、矢印Nは、その圧接により形成される定着ニップ部の範囲を示している。加圧ローラ202は、後述する定着駆動モータ581によって、矢示Aの方向に所定の速度で回転するように駆動する。加圧ローラ202が回転駆動すると、定着ニップ部Nにおいて、加圧ローラ202と定着フィルム201の外面との摩擦力によって、定着フィルム201に、直接的に、回転力が作用する。その結果、定着フィルム201が、セラミックヒータ205の下面に圧接摺動し、矢示Bの方向に回転するように駆動する。また、記録紙Pが、矢印Cの方向に定着ニップ部Nに挿入された場合には、定着フィルム201に、記録紙Pを介して間接的に、回転力が作用する。
剛体ステー204は、記録紙Pの搬送路を横断する方向(図面に垂直方向)を長手とする横長部材であり、耐熱性と断熱性を有している。また、剛体ステー204は、セラミックヒータ205を固定する。
セラミックヒータ205は、剛体ステー204の下面に長手方向に沿って形成した溝部に嵌入され、耐熱性接着剤で固定された、転写材搬送路を横断する方向を長手とする横長の部材である。セラミックヒータ205の上面には、後述するサーミスタ206が、1個搭載されている。
剛体ステー204は、定着フィルム201の内面ガイド部材としても機能し、定着フィルム201の回転を容易にすることができる。また、定着フィルム201の内面とセラミックヒータ205の下面との間に、耐熱性グリス等の潤滑剤を少量介在させ、摺動抵抗を低減させても良い。
加圧ローラ202の回転によって、定着フィルム201の回転が定常化し、セラミックヒータ205の温度が所定に立ち上がった状態において、定着ニップ部Nの定着フィルム201と加圧ローラ202との間に画像定着される記録紙Pが導入される。更に、定着フィルム201と共に定着ニップ部Nが挟持搬送されることによって、セラミックヒータ205からの熱が、定着フィルム201を介して、記録紙Pの未定着画像部分に供給される。その結果、記録紙P上の未定着画像部分が、記録紙P上に加熱定着される。定着ニップ部Nを通過した記録紙Pは、定着フィルム201の面から分離され、矢印Cの方向に搬送される。
図3は、図2に示すセラミックヒータの詳細な構成とメインヒータ及びサブヒータの発熱分布を示す図である。図3は、図2において、上側よりセラミックヒータ205を見た図である。
セラミックヒータ205は、記録紙Pの搬送方向に直交する方向に長く配設されている。セラミックヒータ205は、例えば、アルミナ(Al2O3)が用いられた基材301と、電気発熱体である発熱パターン302a及び302bとを含んで構成されている。発熱パターン302a及び302bは、セラミックヒータ205の一面側にパターニングされていて、電気絶縁層としてのガラス保護膜によって被覆されている。以下、発熱パターン302aで形成されたヒータ部をメインヒータ、発熱パターン302bで形成されたヒータ部をサブヒータという。電極303a、303b、303cは、メインヒータ302a及びサブヒータ302bの両端に電圧を印加する給電電極である。
図3に示すように、メインヒータ302aとサブヒータ302bは、異なる発熱分布を有する。図3の(a)に示すように、メインヒータ302aの場合には、セラミックヒータ205の中央部付近において、大きく発熱量が分布している。また、図3の(b)に示すように、サブヒータ302bの場合には、セラミックヒータ205の端部において、大きく発熱量が分布している。
本実施形態における定着装置116は、セラミックヒータ205の温度を測定するための、例えば、サーミスタ206である温度検知手段と、異常加熱時の電流遮断手段としてのサーモスイッチとを有する。
図3に示すように、サーミスタ206は、セラミックヒータ205の長手方向中央部に配置され、セラミックヒータ205上に所定圧で押し当てられている。なお、サーミスタ206は、図5に示すように、抵抗604を介して電源VCCが一端に供給され、他端は接地電位とされている。サーミスタ206の抵抗値は、温度に従って変化し、その変化は、検出信号S6として、CPU501に出力される。また、サーモスイッチは、図5に示すように、メインヒータ302a及びサブヒータ302bと、AC電源504との間に挿入され、作動温度に達した場合に通電経路を遮断する。本実施形態においては、サーモスイッチは、250℃において作動する。
ここでサーモスイッチの作動温度について説明する。
図4は、セラミックヒータの温度と、サーモスイッチの作動温度との関係を示す図である。一般的に、サーモスイッチの実際の作動温度は、熱容量に起因して、周囲の温度上昇速度によって変化する特徴を有している。直線Dは、セラミックヒータ205の温度変化が急峻である場合のサーモスイッチの実際の作動温度を示している。直線Dの場合に、サーモスイッチは、実際には、250℃よりΔTa高い温度において作動し、通電経路を遮断する。一方、直線Eは、セラミックヒータ205の温度変化が緩やかである場合のサーモスイッチの実際の作動温度を示している。直線Eの場合に、サーモスイッチは、実際には、250℃よりΔTb高い温度において作動し、通電経路を遮断する。図4に示すように、ΔTaは、ΔTbより大きく、サーモスイッチは、作動温度に到達するまでの温度上昇が緩やかである程、より250℃に近い温度で作動する。
次にセラミックヒータ205に電流を供給する電力供給制御回路について説明する。図5は、本発明の第1の実施形態に係る電力供給制御回路の構成を示す図である。図5に示すように、電力供給制御回路5は、セラミックヒータ205と、サーモスイッチ551と、CPU501と、第1及び第2のトライアック502及び503と、AC電源504と、リレー回路505とを含んでいる。また、電力供給制御回路5は、ゼロクロス検知回路511と、第1及び第2のトライアック駆動回路552及び553と、モータ回転検知回路554と、定着駆動モータ581とを、更に含んでいる。第1のトライアック502とメインヒータ302aとが直列に接続され、第2のトライアック503とサブヒータ302bとが直列に接続されている。また、第1のトライアック502及びメインヒータ302aと、第2のトライアック503及びサブヒータ302bとが、AC電源に対して並列に構成されている。
また、図5に示すように、リレー回路505が、第1及び第2のトライアック502及び503の一端と、AC電源504との間に挿入され、CPU501からの信号RLDによって制御され、通電経路を遮断することができる。また、サーモスイッチ551が、メインヒータ302a及びサブヒータ302bの一端と、AC電源504との間に挿入され、所定の温度により、通電経路を遮断する。
第1のトライアック駆動回路552は、抵抗564及び565を介して、第1のトライアック502と接続されており、CPU501から供給される駆動信号S1によって制御され、第1のトライアック502をオンオフする。また、第2のトライアック駆動回路553は、抵抗560及び561を介して、第2のトライアック503と接続されており、CPU501から供給される駆動信号S2によって制御され、第2のトライアック503をオンオフする。
ゼロクロス検知回路511は、図5に示すN(Neutral)点及びH(Hot)点によって、AC電源504の電源電圧の位相を検知し、位相に応じて変化するパルス信号(以下、ゼロクロス信号という)をCPU501に出力する。また、既に説明したように、サーミスタ206は、セラミックヒータ205の温度を検出し、検出信号S6をCPU501に出力している。モータ回転検知回路554及び定着駆動モータ581については、後述する。電力供給制御回路5は、以上のような構成によって、セラミックヒータ205に供給する電力を全波位相制御している。
なお、本実施形態において、電力供給制御回路5は、第1及び第2のトライアック502及び503に流れる交流電流を全波位相制御することによって、セラミックヒータ205に供給する電力を制御する電力制御手段を有している。全波位相制御方式とは、交流波形におけるゼロクロスポイントから通電するタイミングまでの時間を変化させることで位相制御する方式として一般的に知られている。本実施形態においては、CPU501が、例えば、ゼロクロス信号に基づいて駆動信号S1を出力し、メインヒータ302aに所望の電力を印加することができる。
図6の(a)は、ゼロクロス信号と駆動信号S1とのタイミングを示す波形図である。図6の(a)に示すように、AC電源504から第1のトライアック502に供給される交流電流波形の1周期において、矢印で示されたゼロクロス信号の立下りのタイミングから所定時間t1及びt2遅延させたタイミングで、駆動信号S1をオンにしている。
駆動信号S1がハイレベルとなると、第1のトライアック502に電流が流れる。駆動信号S1は、再び、ローレベルとなるが、第1のトライアック502の電流は、極性が切り替わるまで流れ続ける。
図6の(b)は、時間t1及びt2と、セラミックヒータ205に印加される電力の関係を示すテーブルである。本実施形態においては、駆動信号S1がオンとなるタイミング(時間t1及びt2)を図6の(b)に示すテーブルに従って設定し、セラミックヒータ205に所望の電力を印加することができる。図6の(b)に示すテーブルは、AC電源の周波数が50Hzである場合であり、また、全ての位相において通電した場合の印加電力を100%としている。
図7は、ゼロクロス検出回路の内部構成を示す回路図である。N点又はH点から供給された交流電圧は、それぞれ整流ダイオード70又は71によって、半波整流される。また、電流制限用の抵抗72、73、76によって定められる電流が、トランジスタ77のベースに供給される。ここで、コンデンサ75は、外部からのノイズ除去のために挿入されている。図7においては、1次と2次間の沿面距離を確保するために、フォトカプラ79が用いられている。また、1次側の電源電圧VCCが、電流制限用の抵抗78を介して、フォトカプラ79の発光側に供給されている。更に、2次側の電源電圧Vrefが、電流制限用の抵抗80を介して、フォトカプラ79の出力トランジスタのコレクタに供給されている。フォトカプラ79の出力は、コンデンサ82と抵抗81を介し、ゼロクロス信号として、CPU501に供給される。
図7において、H点電圧が、トランジスタ77の閾値電圧よりも高くなると、トランジスタ77及びフォトカプラ79がオンし、ゼロクロス信号は、ローレベルとなる。また、H点電圧が、閾値電圧よりも低くなると、トランジスタ77及びフォトカプラ79がオフし、ゼロクロス信号は、ハイレベルとなる。従って、ゼロクロス信号は、ハイレベル又はローレベルを出力するパルス信号となる。
図8の(a)は第1のトライアック502を駆動する第1のトライアック駆動回路552の内部構成を示す回路図である。CPU501によって、駆動信号S1が、ハイレベルとされると、トランジスタ911がオンとなり、電源電圧Vccから抵抗909を介して、フォトトライアック908のフォトダイオードに電流が流れる。その結果、抵抗564及び565を介して、トライアック502のゲートに電流が流れ、トライアック502がオンとなる。ゼロクロス信号及び駆動信号S1による、トライアック502に流れる電流の変化は、図6における説明と同様である。
図8の(b)は、第2のトライアック503を駆動する第2のトライアック駆動回路553の内部構成を示す回路図である。図8の(b)は、トランジスタ904と、抵抗902及び903が含まれている点において、図8の(a)と異なる。トランジスタ904は、モータ回転検知回路554から入力される駆動信号MOTDETによって制御される。信号MOTDETがローレベルの場合には、トランジスタ904がオンとなり、フォトトライアック901は、駆動信号S2によって制御される。一方、信号MOTDETがハイレベルの場合には、トランジスタ904がオフとなり、フォトトライアック901のフォトダイオードに電圧が印加されない。その結果、駆動信号S2に関わらず、フォトトライアック901はオフとなり、第2のトライアック503は、強制的にオフとなる。
図9は、第2のトライアック503に流れる電流と、ゼロクロス信号と、駆動信号MOTDET及びS2を示す波形図である。タイミングT1〜T5において、駆動信号MOTDETがローレベルとされているので、電流は、駆動信号S2に従って位相制御される。しかしながら、タイミングT5以降においては、駆動信号MOTDETがハイレベルとされているので、駆動信号S2に関わらず、通電経路が遮断される。
再び、図5を参照する。図5に示す定着駆動モータ581は、図2に示す加圧ローラ202を回転駆動する。図5に示すように、定着駆動モータ581は、信号ACC及びBLKをCPU501から入力し、信号FGをCPU501及びモータ回転検知回路554に出力する。信号ACCがCPU501によって、例えば、ローレベルに活性化されると、定着駆動モータ581が加速される。また、信号BLKがCPU501によって、例えば、ローレベルに活性化されると、定着駆動モータ581が減速される。信号FGは、定着駆動モータ581の回転数に比例した周波数を有するパルス信号として出力される。CPU501は、信号FGを受信すると、信号FGの周波数を所定値とするように、信号ACC又はBLKを活性化又は非活性化する。その結果、定着駆動モータ581が、定速回転するように制御される。図5に示すモータ回転検知回路554は、定着駆動モータ581から信号FGを入力し、モータの回転状態を検知する回転検知手段を有している。
図10は、モータ回転検知回路554の内部構成を示す回路図である。図10に示すように、定着駆動モータ581から入力された信号FGは、Dフリップフロップ1201によって、1/2分周され、トランジスタ1202のゲートに供給される。トランジスタ1202のスイッチング動作により、コンデンサ1204に矩形波が印加される。本実施形態において、矩形波は、24Vの振幅を有している。更に、矩形波は、ダイオード1205を介して、オペアンプ1211の反転入力端子に供給される。オペアンプ1211と、抵抗1209と、コンデンサ1210とは、積分回路を構成していて、供給された矩形波は、直流信号に変換され、オペアンプ1211から出力される。
ここで、オペアンプ1211の出力電圧Vopは次式(1)によって求められる。
Vop=Vt―(24―Vt)×C1204×R1209×f÷2 ・・・(1)
式(1)において、Vtは、オペアンプ1211の非反転入力端子電圧を、C1204は、コンデンサ1204の静電容量を、R1209は、抵抗1209の抵抗値を、fは、信号FGの周波数を示している。式(1)に示すように、出力電圧Vopは、信号FGの周波数に依存し、信号FGの周波数が高くなる程、出力電圧Vopは低くなる。オペアンプ1211の出力電圧Vopは、コンパレータ1214の非反転入力端子に入力される。
コンパレータ1214において、出力電圧Vopが、抵抗1212及び1213によって決定される基準電圧と比較される。従って、コンパレータ1214から出力される信号MOTDETのレベルは、信号FGの周波数に基づいて、決定されることになる。本実施形態において、定着駆動モータ581が回転状態である場合には、コンパレータ1214の出力は、ローレベルとなり、回転停止状態である場合には、ハイレベルとなる。
次に、図5を参照しながら、本実施形態に係る電力供給制御回路5の動作について説明する。電力供給制御回路5には、電力供給制御回路5を含む画像形成装置の電源が投入された状態において、プリント動作が行われているプリント動作モードと、プリント動作が行われていないスタンバイモードとが存在する。
プリント動作モードにおいては、定着駆動モータ581を回転駆動させ、メインヒータ302a及びサブヒータ302bに電流を供給する。その結果、メインヒータ302a及びサブヒータ302bが、共に、発熱する。プリント動作モードにおいて、CPU501は、図示されていない外部のコントローラから、例えば、プリントスタート信号を受信し、画像形成シーケンスプログラムを実行する。その際に、CPU501は、駆動信号S1及びS2によって、第1及び第2のトライアック502をオンとする。その結果、メインヒータ302a及びサブヒータ302bに電流が供給される。
本実施形態において、サブヒータ302bに供給される電流は、記録紙Pの幅長に応じて、メインヒータ302aに対して一定の比率の電力が供給されるように制御されている。ここで、記録紙Pの幅長とは、記録紙Pの搬送方向に対する垂直方向の長さをいう。
図11は、記録紙Pの幅長と、サブヒータ302bの通電設定の関係を示す図である。図11に示すように、4種類の幅長に応じて、メインヒータ302aに対するサブヒータ302bの電力比率が設定されている。即ち、幅長が小さくなる程、メインヒータ302aに対するサブヒータ302bの電力比率が小さく設定される。その結果、プリント動作中に定着装置116の端部の温度が高くなる現象(以下、端部昇温という)を抑えることができる。定着装置116の加熱領域の幅に比べて記録紙Pの幅長が小さい場合には、定着装置116の端部が非通紙領域となる。従って、記録紙Pを通紙する部分と通紙しない部分とにおいて、奪われる熱量が大きく異なるので、セラミックヒータ205の端部の温度が高くなる現象が起きる。この端部昇温の現象によって、しわの発生やオフセット等、様々な問題が生じてしまう。そのようなセラミックヒータ205の温度の不均一性は、通紙する記録紙Pの幅長が小さい程、大きくなってしまう。しかしながら、本実施形態においては、図11に示すようにサブヒータ302bへの供給電力を設定することによって、上述の問題を回避することができる。
既に説明したように、セラミックヒータ205は、サーミスタ206によって、温度が検出される。また、サーミスタ206は、セラミックヒータ205の長手方向の中心位置に設けられているので、セラミックヒータ205の中央部の温度状態が、検知されることができる。CPU501は、サーミスタ206の検知温度と、基準となる目標温度との差を検出し、セラミックヒータ205の中央部を所望の温度に維持するように第1及び第2のトライアック502及び503を制御する。本実施形態における電力供給制御回路5は、プリント動作モードにおけるサーミスタの検知温度を200℃一定とするように動作する。
次に、スタンバイモードについて説明する。スタンバイモードにおいては、定着駆動モータ581は停止していて、メインヒータ302aのみ電力が供給されている。即ち、電力供給制御回路5が有する電力制限手段によって、スタンバイモードにおいて、セラミックヒータ205に供給される電力の一部が制限される。メインヒータ302aに供給される電力は、サーミスタ206によって検知された温度に基づいて制御される。本実施形態における電力供給制御回路5は、スタンバイモードにおけるサーミスタの検知温度を80℃一定とするように動作する。
このように、スタンバイモードにおいても温度を安定化制御することによって、セラミックヒータ205のプリント動作モードに立ち上がる時間を短くすることができる。プリント動作モードにおいては、加圧ローラ202が駆動しているので、セラミックヒータ205から加圧ローラ202に放熱される量は、加圧ローラ202が停止しているスタンバイモードにおける場合よりも大きくなる。従って、プリント動作モードにおいては、セラミックヒータ205を所望の温度に制御するために、大きな電力が必要となる。逆に、スタンバイモードにおいては、セラミックヒータ205を所望の温度に制御するための電力は小さくてすむ。
次に、通電暴走が発生した場合におけるセラミックヒータ205の過熱を抑える安全装置の動作について説明する。通電暴走とは、何かしらの原因により、第1のトライアック502及び/又は第2のトライアック503がオンに固定され、セラミックヒータ205に電流が供給され続ける状態をいう。このような通電暴走の現象は、第1又は第2のトライアック502又は503、第1又は第2のトライアック駆動回路552又は553が破壊された場合において発生すると考えられる。又は、サーミスタの異常動作又はCPU501に搭載されているソフトウエアの暴走によって、セラミックヒータ205に電流が供給され続けるように制御されてしまう場合が、考えられる。
いずれの場合においても、メインヒータ302aとサブヒータ302bのいずれか一方に対する通電暴走が発生した時には、セラミックヒータ205の温度が急峻に上昇することはない。従って、サーモスイッチは、図4に示す250℃近傍で作動することができる。その結果、セラミックヒータ205の過昇温による定着装置116近辺の変形や変質等のダメージを防ぐことができる。
次に、メインヒータ302a及びサブヒータ302bに対して、共に通電暴走が発生した場合を考える。まず、プリント動作モードにおいて、そのような通電暴走が発生すると、セラミックヒータ205の温度が上昇する。しかしながら、既に説明したように、セラミックヒータ205で発生した熱は、回転駆動する加圧ローラ202に放熱される。従って、セラミックヒータ205の温度は、緩やかに上昇する。その結果、セラミックヒータ205の過昇温による定着装置116周辺の変形や変質等のダメージを防ぐことができる。
図12は、通電暴走時のセラミックヒータの温度の時間変化を示す図である。図12に示す直線Fが、上述のプリント動作モードにおける場合を示している。スタンバイモードにおいては、加圧ローラ202は停止している。本実施形態においては、モータ回転検知回路554から出力される駆動信号MOTDETによって、第2のトライアック503は、強制的にオフとされている。従って、スタンバイモードにおいては、メインヒータ302a及びサブヒータ302bの両方に対して通電暴走が発生する場合はなく、セラミックヒータ205の温度は、図12に示す直線Gのように上昇する。即ち、加圧ローラ202が停止しているので、セラミックヒータ205からの熱が放熱されにくいのであるが、第2のトライアック503がオフとされているので、サーモスイッチの実際の作動温度は、直線Fの場合よりも少し高くなる程度に抑えられる。その結果、セラミックヒータ205の過昇温による定着装置116周辺の変形や変質等のダメージを防ぐことができる。
図12に示す直線Iは、スタンバイモードにおいて、メインヒータ302a及びサブヒータ302bの両方に対して、通電暴走が発生した場合の温度上昇を表している。その場合に、温度は、急峻に上昇するので、サーモスイッチの実際の作動温度が、直線F及びGの場合に比べて高くなる。従って、定着装置116周辺の変形や変質等のダメージを生じる危険性が高くなる。以上のように、本実施形態に係る定着装置116は、加圧ローラ202が停止するスタンバイモードにおいて、第2のトライアック503を強制的にオフとする。従って、スタンバイモードにおいて通電暴走が発生した場合でも、セラミックヒータ205の温度上昇速度を抑え、サーモスイッチを低い温度で作動させることができ、通電暴走による定着装置周辺の変形や変質等のダメージの危険性を低減することができる。
以上において説明した定着装置116を含み、電子写真方式により像担持体上に形成されたトナー像が記録媒体上に転写される画像形成装置を構成した場合において、サービスマン等による部品を交換するコストを低減することができる。また、本実施形態において、第1のトライアック502は、モードに関わらず通電可能であるので、スタンバイモードにおいてもセラミックヒータ205の温度制御を行うことができ、プリント動作モードへの立ち上がり時間を短くすることができる。また、本実施形態においては、セラミックヒータ205の温度を検出するサーミスタ206も1個であるので、部品点数を抑えることができる。更に、本実施形態において、サブヒータ302bが1個である場合を説明したが、サブヒータが2以上(Nを整数とするN個の電気発熱体の内、N−1個がサブヒータ。)構成されていても良い。その場合には、メインヒータ302aのみ通電し、2以上(N−1個)のサブヒータがCPU501からの駆動信号によって、強制的にオフとされる。即ち、サブヒータが1個の場合を含めると、N個の電気発熱体の内、1乃至N−1個のサブヒータが、強制的にオフとされる。
次に、第2の実施形態について説明する。第2の実施形態においては、加圧ローラ202が停止するスタンバイモードにおいて、メインヒータ302a及びサブヒータ302bの両方に供給する電流を、周期的にオフとする。
図13は、本発明の第2の実施形態に係る電力供給制御回路の構成を示す図である。図13に示すように、電力供給制御回路6は、分周回路1701と、AND回路1702とが加えられて構成されている点において、電力供給制御回路5と異なる。分周回路1701は、ゼロクロス信号を入力し、信号ZEROCLKを出力する。AND回路1702は、信号MOTDETと信号ZEROCLKとの論理積を、駆動信号HEATCLKとして、第1及び第2のトライアック駆動回路1703及び1704に出力する。
図14の(a)は、本実施形態に係る第1のトライアック駆動回路1703の内部構成を示す回路図である。図14の(a)は、トランジスタ1601と、抵抗1602及び1603が、加えられて構成されている点において、図8の(a)と異なる。トランジスタ1601は、駆動信号HEATCLKによって駆動する。駆動信号HEATCLKがローレベルとなると、トランジスタ1601がオンとなり、フォトトライアック908は、駆動信号S1によって制御される。一方、駆動信号HEATCLKがハイレベルとなると、トランジスタ1601がオフとなり、フォトトライアック908のフォトダイオードに電圧が印加されない。その結果、駆動信号S2に関わらず、フォトトライアック908はオフとなり、第1のトライアック502は、強制的にオフとなる。
図14の(b)は、本実施形態に係る第2のトライアック駆動回路1704の内部構成を示す回路図である。図14の(b)は、駆動信号HEATCLKが、トランジスタ904に入力されている点において、図8の(b)と異なる。従って、駆動信号HEATCLKがハイレベルとなると、駆動信号S2に関わらず、フォトトライアック901はオフとなり、第2のトライアック503は、強制的にオフとなる。図13に示す分周回路1701は、ゼロクロス検知回路511からゼロクロス信号を入力し、1/2に分周し、信号ZEROCLKとして、AND回路1702に出力する。
次に、図13を参照しながら、本実施形態に係る電力供給制御回路6の動作について説明する。電力供給制御回路6には、電力供給制御回路5と同様に、プリント動作モードとスタンバイモードとが存在する。プリント動作モードにおける電力供給制御回路6の動作は、第1の実施形態における説明と同じである。
スタンバイモードにおいては、第1の実施形態と異なり、メインヒータ302a及びサブヒータ302bの両方に電流が供給される。また、両方に供給される電流は、同じ位相において位相制御される。第1の実施形態と同様に、サーミスタ206によって、セラミックヒータ205の温度が検出され、CPU501が、セラミックヒータ205を所望の温度に制御する。本実施形態においては、サーミスタの検知温度が、80℃となるように制御される。
次に、通電暴走が発生した場合におけるセラミックヒータ205の過熱を抑える安全装置の動作について説明する。本実施形態においても、第1又は第2のトライアック502又は503、第1又は第2のトライアック駆動回路1703又は1704、サーミスタ206、CPU501に搭載されているソフトウエアに起因して、通電暴走が生じる場合が考えられる。以下、そのような原因によって、メインヒータ302aとサブヒータ302bに対する通電暴走が生じた場合について説明する。
メインヒータ302aとサブヒータ302bのいずれか一方に対する通電暴走が発生した場合は、第1の実施形態における説明と同様である。次に、メインヒータ302a及びサブヒータ302bに対して、共に、通電暴走が発生した場合を説明する。ここで、プリント動作モードにおいて、モータ回転検知回路554から出力される駆動信号MOTDETは、ローレベルとなる。従って、駆動信号HEATCLKは、ローレベルとなり、第1及び第2のトライアック502及び503は、駆動信号S1及びS2によって制御される。
プリント動作モードにおいて、メインヒータ302a及びサブヒータ302bに対して共に通電暴走が発生すると、セラミックヒータ205の温度が上昇する。しかしながら、第1の実施形態と同様に、セラミックヒータ205で発生した熱は、回転駆動する加圧ローラ202によって放熱される。従って、セラミックヒータ205の温度は、緩やかに上昇する。その結果、セラミックヒータ205の過昇温による定着装置116周辺の変形や変質等のダメージを防ぐことができる。
図15は、通電暴走時のセラミックヒータの温度の時間変化を示す図である。図15に示す直線Jが、上述のプリンタ動作モードにおけるセラミックヒータ205の温度上昇を示している。なお、図15に示す「通電時間=100%」とは、第1及び第2のトライアック502及び503は、強制的にオフとされている時間がないことを示している。
次に、スタンバイモードにおいて、通電暴走が発生した場合を説明する。スタンバイモードにおいて、モータ回転検知回路554から出力される駆動信号MOTDETは、ハイレベルとなる。従って、AND回路1702から出力される駆動信号HEATCLKは、信号ZEROCLKと同様の波形となる。
駆動信号HEATCLKがローレベルである場合は、第1及び第2のトライアック502及び503は、駆動信号S1及びS2によって制御される。また、駆動信号HEATCLKがハイレベルである場合は、第1及び第2のトライアック502及び503は、駆動信号S1及びS2に関わらず、強制的にオフとなる。ここで、信号ZEROCLKは、ゼロクロス信号を1/2分周している。即ち、セラミックヒータ205は、第1及び第2のトライアック502及び503に供給される交流電流の1周期期間において電流を供給される。更に、セラミックヒータ205は、次の1周期期間において電流を供給されない。以降、同様に繰り返される。
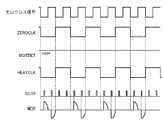
図16は、スタンバイモードにおける第1及び第2のトライアック502及び503からセラミックヒータ205に供給される電流の変化を示す波形図である。図16に示すように、駆動信号HEATCLKは、信号MOTDETがハイレベルであるので、ゼロクロス信号が1/2分周されたZEROCLKと同様の波形となる。ここで、駆動信号S1及びS2をハイレベル一定とすると、セラミックヒータ205に供給される電流は、駆動信号HEATCLKがハイレベルの期間においてゼロとなる。また、図17に示すように、駆動信号S1及びS2をパルス信号とすると、電流が位相制御されるが、駆動信号HEATCLKがハイレベルの期間において、電流はゼロとされる。
再び、図15を参照すると、本実施形態におけるスタンバイモードの際の温度上昇は、直線Kとなる。スタンバイモードにおいては、加圧ローラ202が停止しているので、セラミックヒータ205から放出された熱が放熱されにくい。しかしながら、図16及び図17に示すように、セラミックヒータ205への通電期間は、プリンタ動作モードに比べると50%と抑えられているので、セラミックヒータ205の温度は、緩やかに上昇する。その結果、サーモスイッチの実際の作動温度は、直線Jの場合よりも少し高くなる程度に抑えられ、セラミックヒータ205の過昇温による定着装置116周辺の変形や変質等のダメージを防ぐことができる。
図15に示す直線Lは、スタンバイモードにおいて、メインヒータ302a及びサブヒータ302bの両方に対して、通電期間100%の通電暴走が発生した場合の温度上昇を表している。即ち、図12に示す直線Iと同じである。その場合に、温度は、急峻に上昇するので、サーモスイッチの実際の作動温度が、直線J及びKの場合に比べて高くなる。従って、定着装置116周辺の変形や変質等のダメージの危険性が大きくなる。
以上のように、本実施形態に係る定着装置116は、加圧ローラ202が停止するスタンバイモードにおいて、第1及び第2のトライアック503を、周期的にオフとする。従って、スタンバイモードにおいて通電暴走が発生した場合でも、セラミックヒータ205の温度上昇速度を抑え、サーモスイッチを低い温度で作動させることができ、通電暴走による定着装置周辺の変形や変質等のダメージの危険性を低減することができる。その結果、画像形成装置の部品を交換するコストを低減することができる。また、スタンバイモードにおいて、プリンタ動作モードの50%の期間でセラミックヒータ205に通電しているので、セラミックヒータ205の温度制御を行うことができ、プリンタ動作モードに移行する時間を短くすることができる。
本実施形態においては、図2に示すような加熱定着装置を含み、電子写真プロセス技術により像担持体上に形成されたトナー像が、記録媒体上に転写され、加熱定着手段によって記録媒体に加熱定着される画像形成装置が構成されても良い。