JP5152348B2 - 道路推定装置 - Google Patents
道路推定装置 Download PDFInfo
- Publication number
- JP5152348B2 JP5152348B2 JP2011004119A JP2011004119A JP5152348B2 JP 5152348 B2 JP5152348 B2 JP 5152348B2 JP 2011004119 A JP2011004119 A JP 2011004119A JP 2011004119 A JP2011004119 A JP 2011004119A JP 5152348 B2 JP5152348 B2 JP 5152348B2
- Authority
- JP
- Japan
- Prior art keywords
- road
- link
- attribute
- search
- estimation device
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
Images






























Landscapes
- Navigation (AREA)
- Traffic Control Systems (AREA)
- Instructional Devices (AREA)
Description
<1.ナビゲーション装置の構成>
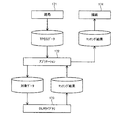
最初にナビゲーション装置の構成を図1に基づいて説明する。図1に示すナビゲーション装置10が「道路推定装置」として機能し、具体的には、TPEG(Transport Protocol Expert Group )データを受信し、データ中の位置情報から道路のマッチングを行い、位置情報と共に送信される交通情報を道路に対応させて表示する。
次に、TPEGデータの処理に関する制御回路17の機能を、図2に基づいて説明する。図2は、制御回路17の機能を模式的に示す説明図である。
選局ブロック171は、上述した受信装置11を介し、TPEGデータを受信するブロックである。つまり、選局ブロック171が、上述した選局機能を有している。受信されるTPEGデータは、選局ブロック171からアプリケーションブロック172へ渡される。
本実施例は、DLRライブラリブロック173によるマッチング処理に特徴を有している。そこで、次にマッチング処理について説明する。図3は、マッチング処理を示すフローチャートである。
中間データへの変換後のCPが有する属性を図4に示す。通常、複数個のCPがTPEGデータの位置情報として送信される。したがって、CPは配列して管理される。もちろん、一つだけのCPから位置を推定することも可能であり、CPが一つだけ送信される場合を排除する趣旨ではない。
属性FCは、道路区分を示すものである。図5に一例を示すように、道路のクラスは、「0」〜「9」の10段階で示される。「0」が「Main road 」であり、「1」が「First class road」であり、「2」が「Second class road 」である。以下同様に、「9」の「Ninth class road」までランク付けされている。例えば、「Main road 」は国や首都に接続されている道路であり、「first class road 」は主要都市間を結ぶ国道であるという具合に、ランク付けされている。
属性DDは、許可された合法の運転方向を示す(図4参照)。例えば、「未定義」は「0」となっており、「順方向」が「1」となっており、同様に、「逆方向」が「2」、「両方向」が「3」となっているという具合である。なお、属性AFRは、属性DDが参照可能であるか否かを示すフラグである。属性DDが「0」〜「3」の値を持っている場合に属性AFRは「1」にセットされ、属性DDが値を持っていない場合には、参照不可として「0」がセットされる。
次に形状系の属性を説明する。
属性BRは、次のCPへの位置的な角度を示す(図4参照)。上述したように、通常、複数個のCPが配列として管理される。BR値は、真北を基準とする時計回りの角度である。
属性CAは、脇道に対する角度を示す。脇道とは、道路番号が付加されないようなマイナーな道路である。脇道がある場合、属性BRの角度を基準に時計回りを「正」とし、反時計回りを「負」とする角度がCA値として設定される。属性DCAは、脇道に対する接続距離を示す。
属性PDは、次に属性PDを含むCPまでの対象道路に沿った道なりの運転距離を示す(図4参照)。
図8中のS110では、対象パーセルの境界に仮想CPを付与する。図9は、CPによって表される道路形状を便宜的に二点鎖線で示す説明図である。もちろん、このような道路形状を推定し、地図データのリンク列で示される道路とのマッチングを行うことが終局的な目標である。したがって、図9中に二点鎖線で示す道路形状は、便宜的なものであり、実際の道路形状を示すものではない。ここで重要なのは、図9に示すように、CPの配列が対象パーセルだけでなくその周囲のパーセルにも跨ることがある、ということである。このような場合に、対象パーセルの境界に仮想CPを付与する。
次のS120では、CPの属性を再計算する。仮想CPを付与することで、終端側のCP(図10(a)ではCP(b))は、後述するように、処理対象のCPから外される。そこで、始端側のCP(図10(a)ではCP(a))及び仮想CPの属性を再計算する。再計算される属性は、属性BR、属性DMB、属性PCI、属性CA、属性DCA、属性PDM、及び、属性PDである。
属性PDMは、次のCPまでを結ぶ直線からの道路の離間距離である(図4参照)。この属性PDMについては、仮想CPを付与する前の値に補正値を乗じて、設定する。具体的には、仮想CPの配置位置割合を算出し、次の式で補正値を計算する。
補正値=0.6×配置位置割合/100・・・式1
(ii)配置位置割合が50%以上のとき
補正値=1.4×配置位置割合/100−0.4・・・式2
ここで、配置位置割合は、次の式で計算される。
始端側CPと仮想CPとの直線距離/始端側CPから終端側CPまでの直線距離合計
・・・式3
となる。
仮想CPと終端側CPとの直線距離/始端側CPから終端側CPまでの直線距離合計
・・・式4
となる。
ここで図8の説明に戻り、S130では、対象パーセル内のCPに絞り込む。この処理は、対象パーセル内のCPだけ(仮想CPを含む)を処理対象とするものである。CPの配列は対象パーセルの境界を越えて続いていくことが考えられるが、アプリケーションで表示対象としている対象パーセルについてのみマッチングを行えば十分だからである。
なお、本実施例では仮想CPを付与することにより対象パーセルの境界にCPが存在するものとして当該仮想CPまでを処理対象としているが、DLRデータとして引き渡される本来のCPを対象パーセルの終端CPとして処理を行うようにしてもよい。
ところで、図8中のS130では、処理対象のCPを決定するに伴い、属性の引き継ぎ処理も行われる。
図3のマッチング処理の説明に戻り、S200では、候補リンク検索処理を実行する。候補リンク検索処理は、候補となるリンク列を検索し、その後、リンク単位で絞り込みを行うものである。次のS300では、候補選定処理を実行する。候補選定処理は、S200にて絞り込まれたリンクを、さらに絞り込むものである。続くS400では、道路マッチング処理を実行する。道路マッチング処理は、CP間を繋ぐリンクを推定するものである。これらS200〜S400の処理は、図8中のS130で絞り込まれる各CPを対象CPとしてCPの数だけ繰り返し実行される。
最初のS210では、対象CPの情報が取得される。この処理は、CPの種類、緯度、経度を取得するものである。CPの種類は、交差点を示すCP、仮想CP、その他のCPの区別である。
ここで、リンク列選定処理について詳細に説明する。リンク列選定処理の一例を図14に示す。このリンク列選定処理では、非形状系の属性である属性FC、属性FW、属性RDにより、リンク列単位での抽出が行われる。
<5.2 リンクの抽出>
図12のS250では、対象CPを中心とする検索範囲に一部が含まれるリンクを抽出する。S240のリンク列選定にてリンク列が選定されるため、ここでは、選定されたリンク列を構成するリンクのうち検索範囲に一部が含まれるリンクを抽出する。
対象CPが交差点を示す場合は、ノードを意識した処理を行う。すなわち、対象CPが交差点を示す場合は、対象CPがノードと対応付けられるためである。したがって、この場合、リンクを構成する2つのノードのうちのいずれかが検索範囲に含まれているリンクを「検索範囲に一部が含まれるリンク」とする。
対象CPが仮想CPである場合も、ノードを意識した処理を行う。地図データの仕様では、パーセル境界には必ずノードが設定される。したがって、対象CPが仮想CPである場合、当該仮想CPは、パーセル境界に付与されるものであるため、同一のパーセル境界に存在するノードがあれば、そのノードと対応付けられる。
この場合、対象CPがノードと対応付けられるか否かは分からないため、ノードを意識することなく、リンクの抽出を行う。つまり、対象CPが交差点でも仮想CPでもない場合は、リンクを構成する少なくともいずれかのノードが検索範囲に含まれている場合の他に、ノードが検索範囲に存在しないリンクも一定条件を満たす場合には抽出する。この場合のリンクの抽出は、全てのパーセルレベルで同様に行われる。
「一定条件を満たす場合」とは、次の2つの場合をいう。一つは、ノード間に形状補間点が設定されている場合、当該形状補間点を結んだ線分の一部が検索範囲に含まれている場合である。例えば図15(c)に示すリンクL9は、その形状補間点(小さな黒丸)を結ぶ線分の一部が検索範囲に含まれているため、ノードE,Fが検索範囲に含まれていないが「検索範囲に一部が含まれるリンク」となる。一方、リンクL10は、その形状補間点を結ぶ線分の一部が検索範囲に含まれていないため、「検索範囲に一部が含まれるリンク」にならない。もう一つは、ノード間に形状補間点が設定されていない場合、2つのノードを結ぶ線分の一部が検索範囲に含まれている場合である。例えば、図15(d)に示すリンクL11は、2つのノードG,Hを結ぶ線分の一部が検索範囲に含まれているため、「検索範囲に一部が含まれるリンク」となる。
図12の説明に戻り、続くS260では、検索範囲に一部が含まれるリンクのうちで属性RDが一致するリンクに絞り込む。属性RDが道路番号を示す場合は図14中のS243にて判断するため、ここでは属性RDが道路名称である場合に、当該道路名称による一致を判断する。なお、道路名称は最大5文字となっているため、属性RDの値としての文字列がリンクに付与される道路名称に含まれるか否かを判断する。
次に、図3中のS300の候補選定処理について説明する。候補選定処理は、リンク、ノード単位の候補選定を行うものである。候補選定処理の一例を図16に示した。
ここで、S310の非形状系属性の一致判定の詳細を説明する。非形状系属性の一致判定の一例を図17に示す。
続けて、S330の形状系属性の一致判定の詳細を説明する。形状系属性の一致判定の一例を図18に示す。
次に、S400の道路マッチング処理について説明する。道路マッチング処理の一例を図22に示す。道路マッチング処理では、2つのCPを対象CPとし、始端側に位置するCPを始端側CP、終端側に位置するCPを終端側CPとして処理を行う。
最初のS410では、始端候補リンクから終端候補リンクを繋ぐ道路を探索する。始端候補リンクは、始端側CPに対し抽出されたリンクである。また、終端候補リンクは、終端側CPに対し抽出されたリンクである。ここでは、始端候補リンクと終端候補リンクとを結ぶ全ての道路を探索する。例えば、図23(a)に示すように、始端側CPをCP(a)とし、終端側CPをCP(b)とし、CP(a)に対し抽出されたリンクをSLとし、CP(b)に対し抽出されたリンクをGLとする。このとき、始端候補リンクSLと終端候補リンクGLとの間の道路を探索する場合、リンクSLを構成する2つのノードSN1,SN2とリンクGLを構成する2つのノードGN1,GN2との全ての組み合わせを考える。具体的には、SN1→GN1、SN1→GN2、SN2→GN1、SN2→GN2を結ぶ道路を探索する。
なお、このような道路マッチング処理(S410〜S440)がペアとなる2つの対象CPに対して繰り返されるのであるが、上述のS410では、先の道路マッチング処理の結果を用いて探索する道路を省略する場合がある。
CP(b)が交差点である場合、例えば図23(c)に示すように、交差点を示すノードGN2と対応するため、リンクGLについては、一方のノードGN1に接続される道路を探索する。すなわち、SN1→GN1、SN2→GN1を結ぶ道路を探索する。
例えば図24(a)に実線で示すノードN1→N2→N3→N4という探索を最初に行ったものとする。このとき、ノードN1からの道路探索を2度目に行う場合、ノードN1→N5→N2という道路探索は行うが、ノードN2から先の探索は既に行っているため、ノードN2から先の探索は行わない。
ところで、S410における道路探索が所定時間以内に終了するとは限らない。そこで、道路探索を途中で中止するようにしてもよい。
<5.4.4 道路単位候補選定>
ここで、図22中の道路単位候補選定について説明する。道路単位候補選定の一例を図26に示す。道路単位候補選定は、CP間で抽出された道路の単位で、「OK」又は「NG」判定を行うものである。
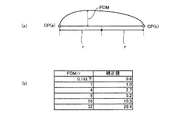
PDM運転距離=CP間の直線距離を直径とする円周の半分×補正値・・・式5
ここで補正値は、属性PDMの値とCP間の直線距離の半分との比率からテーブルによって確定する。例えば、図31(a)に示すようにCP(a)−CP(b)間の直線距離の半分をrとすると、図31(b)に示すテーブルによって、属性PDMの値と距離rとの比率(PDM/r)から補正値を求める。なお、図31(b)に示したテーブルは、一部を抜粋したものである。
PDM運転距離×0.5 <道路運転距離 <PDM運転距離×1.5・・・式6
<5.4.5 マッチング結果の出力>
そして、上述したように、これらの判定結果によって道路を絞り込み(図22中のS430)、道路が一意に決定されると(S440でYES)、S450にてマッチング結果を出力する。マッチング結果は、一意に特定された道路を構成する全リンクのリンクID、始点オフセット距離、終点オフセット距離などで構成される。なお、始点オフセット距離は、道路の始点となるリンクのどの位置からがマッチングの開始位置かを示す距離である。同様に、終点オフセット距離は、道路の終点となるリンクのどの位置までがマッチングの終了位置かを示す距離である。
なお、通常、道路が一意に決定されないと(S440でNO)、道路マッチング失敗となって、マッチング結果が出力されないことになる。ただし、次のような場合には、道路が一意に決定されたものとする。
以上詳述したように本実施形態では、図22に示した道路マッチング処理にて、始端候補リンクと終端候補リンクとを繋ぐ道路を探索し(S410)、探索された道路に対し道路単位の候補選定を行い(S420)、判定結果で絞り込みを行う(430)。そして、道路が一意に決定された場合(S440:YES)、マッチング結果を出力する(S450)。これにより、コアポイントに対応する地図データ上のリンクを抽出した後、当該リンクを結びつける道路を適切に抽出することができる。
そこで、本実施形態では、図23(b)に示したように、CP(a)−CP(b)間の道路推定の結果、リンクSL→CL→GL1という道路が推定されたものとする。このときは、CP(b)から次のCPへの道路推定を行う場合、リンクGL1からの道路を探索する。すなわち、候補リンクにリンクGL2があっても、リンクGL2からの道路探索を省略する。これにより、道路探索処理に要する時間を短くすることができる。
そこで、本実施形態では、図25(a)に示したようにCP(a)及びCP(b)のいずれもが属性PDを有している場合に、ノードN1からノードN2への道路を探索する際、形状補間点K1,K2,K3,K4,・・・での累積距離を算出するようにする。そして、この累積距離が、PD値から一定値以上大きくなった場合、道路探索を中止する。これにより、明らかに不適切なリンクを探索する可能性が小さくなり、S410の道路探索に要する時間を削減することができる。
そこで、本実施形態では、図32(a)に示したように、CP(a)からCP(b)への道路を探索した結果、ノードN1→N4→N5→N2→N3という道路、及び、ノードN1→N4→N5→N2という道路の2つが残った場合、太線で示した道路(ノードN1→N4→N5→N2)は両方の道路に包含されている共通の部分であるため、この道路を一意に決定された道路とする。同様に、図32(b)では、CP(a)からCP(b)への道路を探索した結果、ノードN1→N4→N5→N2→N3という道路、及び、ノードN1→N4→N6→N5→N2→N3という道路の2つが残ったものとする。このとき、太線で示した道路(ノードN1→N4,N5→N2→N3)は、両方の道路に包含されている共通の部分であるため、この分断された2つの道路を、一意に決定された道路とする。これにより、地図上の道路を適切に推定することができる。
例えば、図32(b)に示した例では、道なりの道路N1→N4→N5→N2→N3という道路を、始端側コアポイントから終端側コアポイントへ到る地図上の道路として推定するようにしてもよい。「道なり」とは、図32(c)に示すように、リンク同士のなす角度(例えば記号aで示す角度)が所定角度(例えば15度)以下である場合をいう。このようにすれば、地図上の道路を適切に推定することができる。
11:受信装置
12:位置検出装置
13:地図データ入力装置
14:操作デバイス
15:音声出力デバイス
16:表示デバイス
17:制御回路
17a:CPU
17b:ROM
17c:RAM
20:センタ
171:選局ブロック
172:アプリケーションブロック
173:DLRライブラリブロック
174:描画ブロック
Claims (17)
- 道路に沿って付与され当該道路を特定するための属性を有する複数のコアポイントのデータを外部から受信し、当該コアポイントが示す前記道路に該当する地図上のリンクを抽出することで前記道路を推定する道路推定装置であって、
前記コアポイントの有する属性に応じた属性を有するリンクで構成される地図データを入力する地図データ入力手段と、
前記リンクの有する属性と前記コアポイントの有する属性とに基づき、前記地図データから前記コアポイントが示す前記道路の候補となるリンクを前記各コアポイントに対応させて抽出するリンク抽出手段と、
前記コアポイントの配列から隣り合うコアポイントを始端側コアポイント及び終端側コアポイントとして抽出し、前記リンク抽出手段にて前記始端側コアポイント及び前記終端側コアポイントに対応させそれぞれ抽出された始端候補リンク及び終端候補リンクを接続する道路に該当するリンクを探索する道路探索処理を実行し、
前記探索されたリンクに基づき、前記始端側コアポイントから前記終端側コアポイントへ到る地図上の道路を推定する道路推定手段と、
を備えていることを特徴とする道路推定装置。 - 請求項1に記載の道路推定装置において、
前記道路推定手段は、前記道路探索処理にて探索された前記リンクの中で候補となるリンクを、前記コアポイントの属性に基づき選定する候補選定処理を実行して、前記始端側コアポイントから前記終端側コアポイントへ到る地図上の道路を推定すること
を特徴とする道路推定装置。 - 請求項2に記載の道路推定装置において、
前記道路推定手段は、前記コアポイントのうち始端側のコアポイントの属性に基づき、前記候補選定処理を実行すること
を特徴とする道路推定装置。 - 請求項2又は3に記載の道路推定装置において、
前記道路推定手段は、前記候補選定処理にて、前記コアポイントの属性のうちで道路形状に関わる属性である形状系の属性に基づき、前記リンクを選定すること
を特徴とする道路推定装置。 - 請求項4に記載の道路推定装置において、
前記道路推定手段は、前記候補選定処理にて、脇道への角度及び当該脇道への接続距離を示す脇道情報(属性CA及び属性DCA)、次のコアポイントへの位置的な角度及び接続距離を示す角度距離情報(属性BR及び属性DMB)、コアポイント間の運転距離を示す運転距離情報(属性PD)、及び、次のコアポイントまでを結ぶ直線からの道路の離間距離を示す離間距離情報(属性PDM)の少なくともいずれかに基づき、前記道路を選定すること
を特徴とする道路推定装置。 - 請求項1〜5の何れか一項に記載の道路推定装置において、
前記道路推定手段は、前記道路探索処理にて、前記始端候補リンクの両端点から前記終端候補リンクの両端点までの全ての組み合わせの中で前記リンクを探索すること
を特徴とする道路推定装置。 - 請求項1〜6の何れか一項に記載の道路推定装置において、
前記道路推定手段は、前記道路探索処理にて、前回の処理で決定された前記終端候補リンクがある場合、当該終端候補リンクを前記始端候補リンクとして前記リンクを探索することにより、前記道路探索の一部を省略すること
を特徴とする道路推定装置。 - 請求項1〜7の何れか一項に記載の道路推定装置において、
前記道路推定手段は、前記道路探索処理にて、前記始端側コアポイントが前記始端候補リンクの一方の端点に対応付け可能な場合は当該始端候補リンクのいずれか一方の端点を始点とし、前記終端側コアポイントが前記終端候補リンクの一方の端点に対応付け可能な場合は当該終端候補リンクのいずれか一方の端点を終点として前記リンクを探索することにより、前記道路探索の一部を省略すること
を特徴とする道路推定装置。 - 請求項1〜8の何れか一項に記載の道路推定装置において、
前記道路推定手段は、前記道路探索処理にて、前記始端候補リンクから前記終端候補リンクまでの前記リンクを探索する場合、過去の探索結果を利用することにより、前記道路探索の一部を省略すること
を特徴とする道路推定装置。 - 請求項1〜8の何れか一項に記載の道路推定装置において、
前記道路推定手段は、前記道路探索処理にて、前記始端側コアポイントから前記終端側コアポイントへ向かう方向に基づき前記リンクを探索することにより、前記道路探索の一部を省略すること
を特徴とする道路推定装置。 - 請求項1〜10の何れか一項に記載の道路推定装置において、
前記道路推定手段は、前記道路探索処理にて、前回の処理で推定された道路を構成する前記終端候補リンクの道路区分情報に基づき前記リンクを探索することにより、前記道路探索の一部を省略すること
を特徴とする道路推定装置。 - 請求項1〜11の何れか一項に記載の道路推定装置において、
前記道路推定手段は、前記道路探索処理にて、前記コアポイントの属性として前記始端側コアポイントから前記終端側コアポイントまでの運転距離が分かっている場合、探索の途中で前記リンクの距離が前記運転距離に基づく所定値を上回ると、前記道路探索を中止すること
を特徴とする道路推定装置。 - 請求項1〜12の何れか一項に記載の道路推定装置において、
前記道路推定手段は、前記道路探索処理にて、前記コアポイントの属性として前記始端側コアポイントと前記終端側コアポイントとを結ぶ直線からの道路の離間距離が分かっている場合、探索の途中で前記リンクの距離が前記離間距離に基づく所定値を上回ると、前記道路探索を中止すること
を特徴とする道路推定装置。 - 請求項1〜13の何れか一項に記載の道路推定装置において、
前記道路推定手段は、前記道路探索処理にて、前記道路の探索途中で当該道路を構成するリンク数相当値を計数し、探索の途中で前記リンク数相当値が所定値を上回ると、前記道路探索を中止すること
を特徴とする道路推定装置。 - 請求項1〜14の何れか一項に記載の道路推定装置において、
前記道路推定手段は、前記道路探索処理にて、前記始端側コアポイントに対応付け可能な前記始端候補リンクの端点及び前記終端側コアポイントに対応付け可能な前記終端候補リンクの端点がある場合、探索の途中で前記リンクの距離が前記端点間の距離に基づく所定値を上回ると、前記道路探索を中止すること
を特徴とする道路推定装置。 - 請求項1〜15の何れか一項に記載の道路推定装置において、
前記道路推定手段は、前記始端候補リンク、前記リンク及び前記終端候補リンクからなる道路が複数存在する場合、当該複数の道路に共通する部分があれば、当該共通する部分を前記始端側コアポイントから前記終端側コアポイントへ到る地図上の道路として推定すること
を特徴とする道路推定装置。 - 請求項1〜16の何れか一項に記載の道路推定装置において、
前記道路推定手段は、前記始端候補リンク、前記リンク及び前記終端候補リンクからなる道路が複数存在する場合、当該複数の道路の共通する部分から道路が分岐している場合、前記分岐している道路のうちで道なりの道路を前記始端側コアポイントから前記終端側コアポイントへ到る地図上の道路として推定すること
を特徴とする道路推定装置。
Priority Applications (13)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2011004119A JP5152348B2 (ja) | 2011-01-12 | 2011-01-12 | 道路推定装置 |
| EP11190040.3A EP2458331B1 (en) | 2010-11-24 | 2011-11-22 | Road estimation device and method for estimating road |
| EP11190045.2A EP2458334A3 (en) | 2010-11-24 | 2011-11-22 | Road estimation device and method for estimating road |
| EP11190047.8A EP2458335B1 (en) | 2010-11-24 | 2011-11-22 | Road estimation device and method for estimating road |
| US13/301,834 US8761456B2 (en) | 2010-11-24 | 2011-11-22 | Road estimation device and method for estimating road |
| US13/301,825 US8768011B2 (en) | 2010-11-24 | 2011-11-22 | Road estimation device and method for estimating road |
| US13/301,845 US8768012B2 (en) | 2010-11-24 | 2011-11-22 | Road estimation device and method for estimating road |
| US13/301,822 US8670595B2 (en) | 2010-11-24 | 2011-11-22 | Road estimation device and method for estimating road |
| EP11190042.9A EP2458332B1 (en) | 2010-11-24 | 2011-11-22 | Road estimation device and method for estimating road |
| CN201110378272.1A CN102479434B (zh) | 2010-11-24 | 2011-11-24 | 道路估计设备和用于估计道路的方法 |
| CN201110378053.3A CN102592495B (zh) | 2010-11-24 | 2011-11-24 | 道路估计设备和用于估计道路的方法 |
| CN201110378308.6A CN102564432B (zh) | 2010-11-24 | 2011-11-24 | 道路估计设备和用于估计道路的方法 |
| CN201110378314.1A CN102479436B (zh) | 2010-11-24 | 2011-11-24 | 道路估计设备和用于估计道路的方法 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2011004119A JP5152348B2 (ja) | 2011-01-12 | 2011-01-12 | 道路推定装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2012145450A JP2012145450A (ja) | 2012-08-02 |
| JP5152348B2 true JP5152348B2 (ja) | 2013-02-27 |
Family
ID=46789152
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2011004119A Expired - Fee Related JP5152348B2 (ja) | 2010-11-24 | 2011-01-12 | 道路推定装置 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP5152348B2 (ja) |
Families Citing this family (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP6768365B2 (ja) | 2016-06-14 | 2020-10-14 | クラリオン株式会社 | 経路情報変換システム、経路情報送信装置、経路情報受信装置 |
| JP6785180B2 (ja) * | 2017-04-10 | 2020-11-18 | 株式会社ゼンリン | 車両制御システム及び管理テーブル生産方法 |
| CN115033765B (zh) * | 2022-06-06 | 2024-12-06 | 复旦大学 | 一种解决局部路网分离的路由连通性方法 |
Family Cites Families (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP4663136B2 (ja) * | 2001-01-29 | 2011-03-30 | パナソニック株式会社 | デジタル地図の位置情報伝達方法と装置 |
| JP2006170978A (ja) * | 2004-11-17 | 2006-06-29 | Matsushita Electric Ind Co Ltd | 位置情報送信装置、位置情報受信装置、位置情報交換方法、位置情報交換プログラム、及び位置情報交換システム |
| JP2007178126A (ja) * | 2005-12-26 | 2007-07-12 | Aisin Aw Co Ltd | 走行リンク特定システム |
| JP4584344B1 (ja) * | 2009-09-30 | 2010-11-17 | 株式会社野村総合研究所 | 走行リンク確定装置及びリンク旅行時間算出装置 |
-
2011
- 2011-01-12 JP JP2011004119A patent/JP5152348B2/ja not_active Expired - Fee Related
Also Published As
| Publication number | Publication date |
|---|---|
| JP2012145450A (ja) | 2012-08-02 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5152305B2 (ja) | 道路推定装置 | |
| JP5152306B2 (ja) | 道路推定装置 | |
| EP2458335B1 (en) | Road estimation device and method for estimating road | |
| EP2458332B1 (en) | Road estimation device and method for estimating road | |
| EP2458331B1 (en) | Road estimation device and method for estimating road | |
| US8666663B2 (en) | Route search device and route search method | |
| US8761456B2 (en) | Road estimation device and method for estimating road | |
| WO2018151005A1 (ja) | 走行支援装置及びコンピュータプログラム | |
| JP2010066059A (ja) | 車載用ナビゲーション装置及びプログラム | |
| JP5152348B2 (ja) | 道路推定装置 | |
| JP5223938B2 (ja) | 道路推定装置 | |
| JP5348159B2 (ja) | 道路推定装置 | |
| JP5348181B2 (ja) | 道路推定装置 | |
| JP2021033548A (ja) | 事故地点管理システム及びプログラム | |
| JP5152051B2 (ja) | ナビゲーション装置およびナビゲーション装置に用いるプログラム | |
| JP2006153713A (ja) | 車両用ナビゲーション装置 | |
| JP2014016370A (ja) | 経路探索装置、および、経路探索方法 | |
| JP2014010061A (ja) | ナビゲーション装置、及び、プログラム | |
| JP2009265084A (ja) | 車載用ナビゲーション装置およびプログラム | |
| GB2537330A (en) | In-vehicle device and route interpolation method therefor |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20120718 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20121024 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20121106 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20121119 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20151214 Year of fee payment: 3 |
|
| R151 | Written notification of patent or utility model registration |
Ref document number: 5152348 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R151 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20151214 Year of fee payment: 3 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| LAPS | Cancellation because of no payment of annual fees |