WO2018151005A1 - 走行支援装置及びコンピュータプログラム - Google Patents
走行支援装置及びコンピュータプログラム Download PDFInfo
- Publication number
- WO2018151005A1 WO2018151005A1 PCT/JP2018/004387 JP2018004387W WO2018151005A1 WO 2018151005 A1 WO2018151005 A1 WO 2018151005A1 JP 2018004387 W JP2018004387 W JP 2018004387W WO 2018151005 A1 WO2018151005 A1 WO 2018151005A1
- Authority
- WO
- WIPO (PCT)
- Prior art keywords
- link
- traffic
- traffic jam
- branch
- congestion
- Prior art date
Links
Images







Classifications
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01C—MEASURING DISTANCES, LEVELS OR BEARINGS; SURVEYING; NAVIGATION; GYROSCOPIC INSTRUMENTS; PHOTOGRAMMETRY OR VIDEOGRAMMETRY
- G01C21/00—Navigation; Navigational instruments not provided for in groups G01C1/00 - G01C19/00
- G01C21/26—Navigation; Navigational instruments not provided for in groups G01C1/00 - G01C19/00 specially adapted for navigation in a road network
- G01C21/34—Route searching; Route guidance
- G01C21/3453—Special cost functions, i.e. other than distance or default speed limit of road segments
- G01C21/3492—Special cost functions, i.e. other than distance or default speed limit of road segments employing speed data or traffic data, e.g. real-time or historical
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01C—MEASURING DISTANCES, LEVELS OR BEARINGS; SURVEYING; NAVIGATION; GYROSCOPIC INSTRUMENTS; PHOTOGRAMMETRY OR VIDEOGRAMMETRY
- G01C21/00—Navigation; Navigational instruments not provided for in groups G01C1/00 - G01C19/00
- G01C21/26—Navigation; Navigational instruments not provided for in groups G01C1/00 - G01C19/00 specially adapted for navigation in a road network
- G01C21/34—Route searching; Route guidance
- G01C21/36—Input/output arrangements for on-board computers
- G01C21/3691—Retrieval, searching and output of information related to real-time traffic, weather, or environmental conditions
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01C—MEASURING DISTANCES, LEVELS OR BEARINGS; SURVEYING; NAVIGATION; GYROSCOPIC INSTRUMENTS; PHOTOGRAMMETRY OR VIDEOGRAMMETRY
- G01C21/00—Navigation; Navigational instruments not provided for in groups G01C1/00 - G01C19/00
- G01C21/26—Navigation; Navigational instruments not provided for in groups G01C1/00 - G01C19/00 specially adapted for navigation in a road network
- G01C21/34—Route searching; Route guidance
- G01C21/3453—Special cost functions, i.e. other than distance or default speed limit of road segments
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01C—MEASURING DISTANCES, LEVELS OR BEARINGS; SURVEYING; NAVIGATION; GYROSCOPIC INSTRUMENTS; PHOTOGRAMMETRY OR VIDEOGRAMMETRY
- G01C21/00—Navigation; Navigational instruments not provided for in groups G01C1/00 - G01C19/00
- G01C21/26—Navigation; Navigational instruments not provided for in groups G01C1/00 - G01C19/00 specially adapted for navigation in a road network
- G01C21/34—Route searching; Route guidance
- G01C21/36—Input/output arrangements for on-board computers
- G01C21/3626—Details of the output of route guidance instructions
- G01C21/3658—Lane guidance
-
- G—PHYSICS
- G08—SIGNALLING
- G08G—TRAFFIC CONTROL SYSTEMS
- G08G1/00—Traffic control systems for road vehicles
- G08G1/09—Arrangements for giving variable traffic instructions
- G08G1/0962—Arrangements for giving variable traffic instructions having an indicator mounted inside the vehicle, e.g. giving voice messages
- G08G1/0967—Systems involving transmission of highway information, e.g. weather, speed limits
- G08G1/096766—Systems involving transmission of highway information, e.g. weather, speed limits where the system is characterised by the origin of the information transmission
- G08G1/096775—Systems involving transmission of highway information, e.g. weather, speed limits where the system is characterised by the origin of the information transmission where the origin of the information is a central station
-
- G—PHYSICS
- G09—EDUCATION; CRYPTOGRAPHY; DISPLAY; ADVERTISING; SEALS
- G09B—EDUCATIONAL OR DEMONSTRATION APPLIANCES; APPLIANCES FOR TEACHING, OR COMMUNICATING WITH, THE BLIND, DEAF OR MUTE; MODELS; PLANETARIA; GLOBES; MAPS; DIAGRAMS
- G09B29/00—Maps; Plans; Charts; Diagrams, e.g. route diagram
- G09B29/10—Map spot or coordinate position indicators; Map reading aids
Definitions
- traffic information is created by information centers such as the VICS (registered trademark: Vehicle Information and Communication System) center that collects the current conditions of each road. To identify traffic lanes, traffic information is classified by lane. Therefore, it is necessary to obtain information that identifies the road conditions, and it is extremely difficult to collect such detailed information from roads throughout the country.
- VICS Vehicle Information and Communication System
- the driving support apparatus includes a traffic jam information acquiring unit that acquires traffic jam information that identifies a traffic jam link in which traffic jam occurs, and a driving support unit that performs driving support based on the traffic jam information.
- Road shape determination means for determining whether or not the traffic congestion link is one or more lanes on one side and the end of the traffic congestion link is branched, and the traffic congestion link is one or more lanes on one side and the traffic link end point When it is determined that there is a branch, it is determined whether or not the connection link, which is another link connected to the branch, includes at least one link where traffic congestion has occurred and one or more links where traffic congestion has not occurred.
- FIG. 1 is a block diagram showing a navigation device 1 according to this embodiment.
- the node data 34 includes actual road branch points (including intersections, T-junctions, etc.) and the coordinates (positions) of node points set for each road according to the radius of curvature, etc.
- Data relating to the node number list, the height (altitude) of each node point, and the like are recorded.
- the traffic information DB 32 is a storage means in which traffic information indicating traffic conditions acquired from an external VICS center or probe center is stored.
- the traffic information stored in the traffic information DB 32 corresponds to the VICS information acquired by communication from the VICS center or the probe information acquired by communication from the probe center, and the information at the present time when the information is acquired as shown in FIG. This is information for identifying a section where a traffic jam occurs or a section where an accident, construction, or the like occurs.
- the traffic jam degree indicating the level of the traffic jam is also acquired.
- the degree of traffic congestion is a parameter indicating the degree of traffic congestion divided into a plurality of stages, and is based on the average vehicle speed detected using a sensor installed on the road and the threshold value set for each road type. Determined.
- FIG. 3 is a flowchart of the traffic information guidance processing program according to the present embodiment.
- the traffic information guidance processing program is a program that is executed after the ACC power supply (accessory power supply) of the vehicle is turned on, and that provides guidance regarding traffic information, particularly traffic jam information.
- 3 and 6 are stored in the RAM 42 and the ROM 43 provided in the navigation device 1 and executed by the CPU 41.
- step (hereinafter abbreviated as S) 1 in the traffic information guidance processing program the CPU 41 obtains a guidance route that is currently set in the navigation device 1 as a planned travel route for the vehicle to travel in the future.
- the guide route is a recommended route from the starting point to the destination set by the navigation device 1, and is searched using, for example, a known Dijkstra method.
- the navigation route 1 may be configured to search for the guidance route, or may be configured to be searched by an external server.
- the departure point may be the current position of the user or an arbitrary point selected by the user (for example, home).
- the destination is set based on, for example, a user operation (for example, a registration point reading operation, facility search or selection operation) received in the operation unit 14.
- a route predicted to travel in the future for example, a route traveling along a road
- a route predicted to travel in the future for example, a route traveling along a road
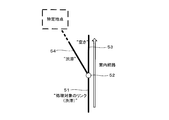
- the CPU 41 determines whether or not a connection link, in particular, a link where the vehicle exits (progresses) at a branch point (hereinafter referred to as an exit link) is not congested. For example, as shown in FIG. 4, when a guidance route for leaving the branch point 52 to the link 53 from the processing target link 51 is set, the link 53 becomes the exit link. Therefore, it is determined whether or not the link 53 is congested.
- the CPU 41 determines whether or not a link in which a traffic jam has occurred (hereinafter referred to as a traffic jam occurrence link) is a link that enters a specific point. For example, as shown in FIG. 5, a guide route is set for exiting the branch point 52 from the processing target link 51 to the link 53, and the link 53 is not congested. If there is a traffic jam, it is determined whether the link 54 is a link that enters a specific point.
- the specific point is one of a ramp (attachment road), a junction, an interchange, a service area, a parking area, a parking lot, and a facility road. Even when the traffic jam occurrence link itself is an exit road at a ramp, junction or interchange, or a facility road, it is determined that the traffic jam occurrence link is a link entering a specific point.
- the CPU 41 provides a driving support according to the link where the vehicle exits at the branch because there is a route that is extremely less influenced by the traffic jam depending on the exit direction of the branch. Specifically, the CPU 41 estimates that the traffic congestion occurring in the processing target link is congested only in some lanes (the lane in the direction to which the traffic congestion link is connected).
- roads divided into lanes are displayed on the liquid crystal display 15, and traffic lanes that are estimated to be congested are displayed, while lanes that are estimated to be free are vacant. May be displayed. Further, only one of guidance for a lane estimated to be congested and guidance for a lane estimated to be free may be provided. Furthermore, the lane estimated to be congested and the lane estimated to be vacant may be guided in an identifiable manner by the guidance voice output from the speaker 16 instead of being displayed on the liquid crystal display 15.
- the CPU 41 reads the traffic information of the surrounding area from the departure point to the destination from the traffic information DB 32.
- the traffic information for identifying the traffic jam link where the traffic jam has occurred is read out as traffic information.
- the traffic information DB 32 stores traffic information indicating the current traffic status acquired from an external VICS center or probe center (see FIG. 2). Details of specific traffic information are the same as in S2.
- the CPU 41 determines whether or not the link to be processed is a link of two lanes or more on one side using the link data 33.
- whether or not the link to be processed is a link of two or more lanes on one side may be determined by storing a specific number of lanes for each road included in the map information in advance. It may be determined based on the road type.
- a flag may be assigned to a section where the number of lanes of the road is a plurality of lanes in the map information, and the determination may be made based on the flag.
- the road type of the traffic jam link or the connection link is not considered, but the road type may be considered.
- the traffic jam link is a main road
- the connection link where the traffic jam occurs is a link that leaves the main road
- the connection link where no traffic jam occurs is a main road that continues with the main road
- working assistance (FIG. 3, FIG. 6) according to the link where a vehicle leaves in the branch mentioned above.
- the driving support means determines that the connection link includes one or more links where traffic congestion has occurred and links where traffic congestion has not occurred, and the vehicle exits at the branch. Links to Carry out the response was traveling support.
- the driving support device having the above-described configuration, even if traffic information that does not include information for identifying a traffic lane is used, some of the lanes included in the traffic congestion link based on the road shape It is possible to estimate that there is a situation where only the traffic lane is congested. As a result, it is possible to perform driving support in consideration of whether or not the traffic jam occurring on the traffic jam link actually affects the user, and it is possible to perform driving support more appropriate for the user.
- the second configuration is as follows.
- the travel support means is such that the traffic congestion link is a main road, the connection link where the traffic jam occurs is a link leaving the main road, and the connection link where no traffic jam occurs continues with the main road.
- driving assistance is provided according to the link at which the vehicle exits at the branch.
- the driving support apparatus having the above-described configuration, when there is a traffic jam on the link exiting from the main road, there is a situation in which only some of the lanes included in the main road are congested. Therefore, it is possible to perform appropriate driving support according to the link exiting at the branch point.
- the fourth configuration is as follows.
- the specific point is one of a ramp, a junction, an interchange, a service area, a parking area, and a parking lot.
- the driving support apparatus having the above-described configuration, when there is a traffic jam on a link to a ramp, junction, interchange, service area, parking area, parking lot, etc. It is possible to estimate that there is a situation where only some of the lanes included in the main road are congested, and to provide appropriate driving support according to the link exiting at the branch point It becomes.
- the fifth configuration is as follows.
- the link exiting from the main road is either a ramp, a junction, an exit road at an interchange, or an in-facility road.
- the driving support device having the above-described configuration, in particular, when there is a traffic jam on a ramp, a leaving road at a junction or an interchange, or a road in a facility where traffic congestion is likely to occur, some of the lanes included in the main road It is possible to estimate that there is a situation where only the lane is congested, and it is possible to perform appropriate driving support according to the link leaving at the branch point.
- the eighth configuration is as follows.
- the driving support includes a route search for searching for a route to a destination, and the driving support means (41) is configured to detect the traffic jam when the vehicle exits from the branch to the link where the traffic jam has not occurred.
- the route search is performed without changing the cost based on the traffic jam on the link. According to the driving support device having the above-described configuration, it is possible to prevent a corrected route from being searched to make it difficult to pass through traffic jams that do not affect the user, particularly when performing route search processing to the destination. It is possible to provide a recommended route more appropriate for the user.
Abstract
渋滞する車線を特定する情報を含まない従来の渋滞情報を用いた場合であっても、車線毎の渋滞を考慮した走行支援を行うことを可能にした走行支援装置及びコンピュータプログラムを提供する。具体的には、渋滞が発生している渋滞リンクを特定する渋滞情報を取得し、渋滞リンクが片側2車線以上のリンクであって、渋滞リンクの終点に分岐があって、該分岐に接続する各リンクに渋滞が発生しているリンクと渋滞が発生していないリンクとを各1以上含む場合には、該分岐において退出するリンクに応じた走行支援を行うように構成する。
Description
本発明は、渋滞情報に基づく走行支援を行う走行支援装置及びコンピュータプログラムに関する。
従来より、車載用のナビゲーション装置、携帯電話、スマートフォン、タブレット型端末、パーソナルコンピュータ等の各種情報端末(以下、ナビゲーション装置等という)では、道路網や施設に関する情報を含む地図情報を各種記憶デバイスに記憶するか、又はサーバ等からダウンロードすることにより取得し、利用者に対して提供することが可能である。また、ナビゲーション装置等では、ユーザの現在位置をGPS等の現在位置測定システムを用いることによって特定し、地図上で案内することや、ユーザによって設定された目的地までの経路を探索し、案内すること等の各種走行支援についても行われていた。
更に、従来のナビゲーション装置等では外部サーバやセンサ等から渋滞情報を取得し、取得した渋滞情報を用いて上記走行支援を行うことが行われている。例えば渋滞している区間や渋滞の度合いを案内したり、渋滞している区間を避ける経路を探索すること等がある。
また、特に道路が複数車線を含む場合においては、複数車線の内、特定の車線のみが渋滞している場合があり、そのような場合においてどのような走行支援を行うかが問題となっていた。例えば、図9に示すように片側3車線からなる道路101において、最も左側の車線にジャンクションへのランプ(取付道路)102が接続される分岐点付近では、最も左側の車線のみが渋滞する場合がある。このような場合において道路が渋滞であると認定して走行支援を行うと、例えば分岐点を直進して通過する車両にとっては渋滞の影響がほとんどないので、結果的に誤った走行支援が行われる可能性があった。
そこで、例えば特開平11-160081号公報には、渋滞情報に渋滞する車線を特定する情報を加えることによって、ナビゲーション装置が渋滞情報を受信した際に渋滞する車線についても特定可能とし、渋滞している区間を矢印で表示する場合において、矢印の種類によって渋滞している車線についても案内することについて開示されている。
しかしながら、上記特許文献1に記載された技術では、渋滞情報に対して渋滞する車線を特定する新たな情報を追加する必要があり、それらの新たな情報を含まない既存の渋滞情報を用いた場合には発明を実施することができなかった。また、渋滞情報は例えばVICS(登録商標:Vehicle Information and Communication System)センタ等の情報センタが各道路の現在の状況を収集して作成するが、渋滞する車線を特定する為には車線毎に区分して道路の状況を特定した情報が必要であり、全国各地の道路からそのような詳細な情報を収集することは極めて困難である。
本発明は前記従来における問題点を解消するためになされたものであり、渋滞する車線を特定する情報を含まない従来の渋滞情報を用いた場合であっても、車線毎の渋滞を考慮した走行支援を行うことを可能にした走行支援装置及びコンピュータプログラムを提供することを目的とする。
前記目的を達成するため本発明に係る走行支援装置は、渋滞が発生している渋滞リンクを特定する渋滞情報を取得する渋滞情報取得手段と、前記渋滞情報に基づく走行支援を行う走行支援手段と、前記渋滞リンクが片側2車線以上であって、前記渋滞リンクの終点に分岐があるか否か判定する道路形状判定手段と、前記渋滞リンクが片側2車線以上であって、前記渋滞リンクの終点に分岐があると判定された場合に、該分岐に接続する他のリンクである接続リンクに渋滞が発生しているリンクと渋滞が発生していないリンクとを各1以上含むか否か判定する渋滞判定手段と、を有し、前記走行支援手段は、前記接続リンクに渋滞が発生しているリンクと渋滞が発生していないリンクとを各1以上含むと判定された場合に、前記分岐において車両が退出するリンクに応じた走行支援を行う。
尚、「渋滞が発生している渋滞リンク」は、リンク全体で渋滞が発生しているリンクとしても良いし、少なくともリンクの一部区間のみで渋滞が発生しているリンクとしても良い。また、「渋滞が発生している渋滞リンク」には、渋滞度合いが閾値以上のリンク、旅行時間や交通量が閾値以上のリンクについても含む。
尚、「渋滞が発生している渋滞リンク」は、リンク全体で渋滞が発生しているリンクとしても良いし、少なくともリンクの一部区間のみで渋滞が発生しているリンクとしても良い。また、「渋滞が発生している渋滞リンク」には、渋滞度合いが閾値以上のリンク、旅行時間や交通量が閾値以上のリンクについても含む。
また、本発明に係るコンピュータプログラムは、車両等の移動体に対する走行支援を行うプログラムである。具体的には、コンピュータを、渋滞が発生している渋滞リンクを特定する渋滞情報を取得する渋滞情報取得手段と、前記渋滞情報に基づく走行支援を行う走行支援手段と、前記渋滞リンクが片側2車線以上であって、前記渋滞リンクの終点に分岐があるか否か判定する道路形状判定手段と、前記渋滞リンクが片側2車線以上であって、前記渋滞リンクの終点に分岐があると判定された場合に、該分岐に接続する他のリンクである接続リンクに渋滞が発生しているリンクと渋滞が発生していないリンクとを各1以上含むか否か判定する渋滞判定手段と、、して機能させる為のコンピュータプログラムであって、前記走行支援手段は、前記接続リンクに渋滞が発生しているリンクと渋滞が発生していないリンクとを各1以上含むと判定された場合に、前記分岐において車両が退出するリンクに応じた走行支援を行う。
前記構成を有する本発明に係る走行支援装置及びコンピュータプログラムによれば、渋滞する車線を特定する情報を含まない渋滞情報を用いた場合であっても、道路形状に基づいて渋滞リンクに含まれる複数の車線の内の一部の車線のみが渋滞している状況が生じていることを推定することが可能となる。その結果、渋滞リンクで発生している渋滞が実際にユーザに影響するか否かについて考慮した走行支援を行うことが可能であり、ユーザにとってより適切な走行支援を行うことが可能となる。
以下、本発明に係る走行支援装置についてナビゲーション装置1に具体化した一実施形態に基づき図面を参照しつつ詳細に説明する。先ず、本実施形態に係るナビゲーション装置1の概略構成について図1を用いて説明する。図1は本実施形態に係るナビゲーション装置1を示したブロック図である。
図1に示すように本実施形態に係るナビゲーション装置1は、ナビゲーション装置1が搭載された車両の現在位置を検出する現在位置検出部11と、各種のデータが記録されたデータ記録部12と、入力された情報に基づいて、各種の演算処理を行うナビゲーションECU13と、ユーザからの操作を受け付ける操作部14と、ユーザに対して車両周辺の地図や交通情報を表示する液晶ディスプレイ15と、経路案内に関する音声ガイダンスを出力するスピーカ16と、記憶媒体であるDVDを読み取るDVDドライブ17と、プローブセンタやVICS(登録商標:Vehicle Information and Communication System)センタ等の情報センタとの間で通信を行う通信モジュール18と、を有している。
以下に、ナビゲーション装置1が有する各構成要素について順に説明する。
現在位置検出部11は、GPS21、車速センサ22、ステアリングセンサ23、ジャイロセンサ24等からなり、現在の車両の位置、方位、車両の走行速度、現在時刻等を検出することが可能となっている。ここで、特に車速センサ22は、車両の移動距離や車速を検出する為のセンサであり、車両の駆動輪の回転に応じてパルスを発生させ、パルス信号をナビゲーションECU13に出力する。そして、ナビゲーションECU13は発生するパルスを計数することにより駆動輪の回転速度や移動距離を算出する。尚、上記4種類のセンサをナビゲーション装置1が全て備える必要はなく、これらの内の1又は複数種類のセンサのみをナビゲーション装置1が備える構成としても良い。
現在位置検出部11は、GPS21、車速センサ22、ステアリングセンサ23、ジャイロセンサ24等からなり、現在の車両の位置、方位、車両の走行速度、現在時刻等を検出することが可能となっている。ここで、特に車速センサ22は、車両の移動距離や車速を検出する為のセンサであり、車両の駆動輪の回転に応じてパルスを発生させ、パルス信号をナビゲーションECU13に出力する。そして、ナビゲーションECU13は発生するパルスを計数することにより駆動輪の回転速度や移動距離を算出する。尚、上記4種類のセンサをナビゲーション装置1が全て備える必要はなく、これらの内の1又は複数種類のセンサのみをナビゲーション装置1が備える構成としても良い。
また、データ記録部12は、外部記憶装置及び記録媒体としてのハードディスク(図示せず)と、ハードディスクに記録された地図情報DB31や交通情報DB32や所定のプログラム等を読み出すとともにハードディスクに所定のデータを書き込む為のドライバである記録ヘッド(図示せず)とを備えている。尚、データ記録部12としてはハードディスクの代わりにメモリーカードやCDやDVD等の光ディスクを有しても良い。また、地図情報DB31や交通情報DB32は外部のサーバに格納させ、ナビゲーション装置1が通信により取得しても良い。
ここで、地図情報DB31は、例えば、道路(リンク)に関するリンクデータ33、ノード点に関するノードデータ34、経路探索処理に用いられる探索データ35、施設等の地点に関する地点データ36、地図を表示するための地図表示データ、各交差点に関する交差点データ、地点を検索するための検索データ等が記憶された記憶手段である。
また、リンクデータ33としては、道路を構成する各リンクに関してリンクの属する道路の幅員、進行方向、勾(こう)配、カント、バンク、路面の状態、道路の車線数、車線数の減少する箇所、幅員の狭くなる箇所、踏切り等を表すデータが、コーナに関して、曲率半径、交差点、T字路、コーナの入口及び出口等を表すデータが、道路属性に関して、降坂路、登坂路等を表すデータが、道路種別に関して、国道、県道、細街路等の一般道のほか、高速自動車国道、都市高速道路、一般有料道路、有料橋等の有料道路を表すデータがそれぞれ記録される。また、道路種別としては取付道路(ランプ)や施設の敷地内に設置された道路である施設内道路を特定するデータについても記憶される。
また、ノードデータ34としては、実際の道路の分岐点(交差点、T字路等も含む)や各道路に曲率半径等に応じて所定の距離毎に設定されたノード点の座標(位置)、ノードが交差点に対応するノードであるか等を表すノード属性、ノードに接続するリンクのリンク番号のリストである接続リンク番号リスト、ノードにリンクを介して隣接するノードのノード番号のリストである隣接ノード番号リスト、各ノード点の高さ(高度)等に関するデータ等が記録される。
また、探索データ35としては、後述のように出発地(例えば車両の現在位置)から設定された目的地までの経路を探索する経路探索処理に使用される各種データについて記録されている。具体的には、交差点に対する経路として適正の程度を数値化したコスト(以下、交差点コストという)や道路を構成するリンクに対する経路として適正の程度を数値化したコスト(以下、リンクコストという)等の探索コストを算出する為に使用するコスト算出データが記憶されている。
また、地点データ36としては、ナビゲーション装置1において出発地、目的地、案内対象等となる各地点に関する情報が記憶される。例えば、ホテル、旅館等の宿泊施設、ガソリンスタンド等の給油施設、ショッピングモール、スーパーマーケット、ショッピングセンタ等の商業施設、テーマパーク、ゲームセンタ等の娯楽施設、レストラン、バー、居酒屋等の飲食施設、公共駐車場等の駐車施設、サービスエリア、パーキングエリア、インターチェンジ、ジャンクション、道の駅等の交通施設、寺院、教会等の宗教施設、美術館、博物館等の公共施設等の施設に関する情報が該当する。
一方、交通情報DB32は、外部のVICSセンタやプローブセンタから取得した交通状況を示す交通情報が記憶された記憶手段である。
ここで、交通情報DB32に記憶される交通情報は、VICSセンタから通信により取得したVICS情報やプローブセンタから通信により取得したプローブ情報が該当し、図2に示すように情報を取得した現時点での渋滞が発生している区間や、事故、工事等が発生している区間を特定する情報である。また、渋滞が発生している区間については渋滞の度合いを示す渋滞度についても取得される。尚、渋滞度は渋滞の度合いを複数段階に区分して示すパラメータであり、路上に設置された感知器等を用いて検出された道路の平均車速と道路種別毎に設定された閾値に基づいて判定される。例えば一般道については車両の平均車速が10km/h未満の区間については『渋滞』、車両の平均車速が10km/h以上20km/h未満の区間については『混雑』、車両の平均車速が20km/h以上の区間については『空き』と判定する。尚、本実施形態では渋滞度が『混雑』及び『渋滞』と判定された区間を渋滞が発生している渋滞区間とし、『空き』と判定された区間を渋滞が発生していない区間とする。但し、『渋滞』と判定された区間のみを渋滞区間としても良い。また、VICSセンタやプローブセンタは、所定時間毎(例えば5分毎)に最新の交通情報をナビゲーション装置1へと配信する。
一方、ナビゲーションECU(エレクトロニック・コントロール・ユニット)13は、ナビゲーション装置1の全体の制御を行う電子制御ユニットであり、演算装置及び制御装置としてのCPU41、並びにCPU41が各種の演算処理を行うにあたってワーキングメモリとして使用されるとともに、経路が探索されたときの経路データ等が記憶されるRAM42、制御用のプログラムのほか、後述の交通情報案内処理プログラム(図3)及び経路探索処理プログラム(図6)等が記録されたROM43、ROM43から読み出したプログラムを記憶するフラッシュメモリ44等の内部記憶装置を備えている。尚、ナビゲーションECU13は、処理アルゴリズムとしての各種手段を有する。例えば、渋滞情報取得手段は、渋滞が発生している渋滞リンクを特定する渋滞情報を取得する。走行支援手段は、渋滞情報に基づく走行支援を行う。道路形状判定手段は、渋滞リンクが片側2車線以上であって、渋滞リンクの終点に分岐があるか否か判定する。渋滞判定手段は、渋滞リンクが片側2車線以上であって、渋滞リンクの終点に分岐があると判定された場合に、該分岐に接続する他のリンクである接続リンクに渋滞が発生しているリンクと渋滞が発生していないリンクとを各1以上含むか否か判定する。
操作部14は、走行開始地点としての出発地及び走行終了地点としての目的地を入力する際等に操作され、各種のキー、ボタン等の複数の操作スイッチ(図示せず)を有する。そして、ナビゲーションECU13は、各スイッチの押下等により出力されるスイッチ信号に基づき、対応する各種の動作を実行すべく制御を行う。尚、操作部14は液晶ディスプレイ15の前面に設けたタッチパネルを有しても良い。また、マイクと音声認識装置を有しても良い。
また、液晶ディスプレイ15には、道路を含む地図画像、交通情報、操作案内、操作メニュー、キーの案内、ナビゲーション装置1で設定されている案内経路、案内経路に沿った案内情報、ニュース、天気予報、時刻、メール、テレビ番組等が表示される。尚、液晶ディスプレイ15の代わりに、HUDやHMDを用いても良い。
また、スピーカ16は、ナビゲーションECU13からの指示に基づいて案内経路に沿った走行を案内する音声ガイダンスや、交通情報の案内を出力する。
また、DVDドライブ17は、DVDやCD等の記録媒体に記録されたデータを読み取り可能なドライブである。そして、読み取ったデータに基づいて音楽や映像の再生、地図情報DB31の更新等が行われる。尚、DVDドライブ17に替えてメモリーカードを読み書きする為のカードスロットを設けても良い。
また、通信モジュール18は、上述した交通情報センタ、例えば、VICSセンタやプローブセンタ等から送信された交通情報を受信する為の通信装置であり、例えば携帯電話機やDCMが該当する。
次に、前記構成を有するナビゲーション装置1において実行する交通情報案内処理プログラムについて図3に基づき説明する。図3は本実施形態に係る交通情報案内処理プログラムのフローチャートである。ここで、交通情報案内処理プログラムは車両のACC電源(accessory power supply)がONされた後に実行され、交通情報の内、特に渋滞情報に関する案内を行うプログラムである。尚、以下の図3及び図6にフローチャートで示されるプログラムは、ナビゲーション装置1が備えているRAM42やROM43に記憶されており、CPU41により実行される。
交通情報案内処理プログラムではステップ(以下、Sと略記する)1において、CPU41は、車両が今後に走行する走行予定経路としてナビゲーション装置1において現在設定されている案内経路を取得する。尚、案内経路はナビゲーション装置1によって設定された出発地から目的地までの推奨経路であり、例えば公知のダイクストラ法を用いて探索される。また、案内経路はナビゲーション装置1が探索する構成としても良いし、外部のサーバが探索する構成としても良い。また、出発地はユーザの現在位置としても良いし、ユーザにより選択された任意の地点(例えば自宅)としても良い。一方、目的地は例えば操作部14において受け付けたユーザの操作(例えば登録地点の読出操作、施設の検索や選択操作)に基づいて設定する。尚、ナビゲーション装置1において案内経路が設定されていない場合には、今後に車両が走行すると予測される経路(例えば道なりに走行する経路)を取得しても良い。
次に、S2においてCPU41は、交通情報DB32から前記S1で取得した案内経路に関する交通情報を読み出す。特に、本実施形態では交通情報として渋滞が発生しているリンク(以下、渋滞リンクという)を特定する渋滞情報について読み出す。尚、渋滞が発生しているリンクとは、リンク全体で渋滞が発生している場合に限られず、リンクの一部区間のみで渋滞が発生しているリンクについても含む。また、リンクの一部区間のみで渋滞が発生しているリンクについては、渋滞が発生している区間にリンクの終点を含むリンク(即ち、リンクの途中から終点まで渋滞しているリンク)のみを渋滞リンクとみなして、以降の処理を行っても良い。但し、リンクの一部区間のみで渋滞が発生し、且つ渋滞が発生している区間にリンクの終点を含まないリンク(例えば、リンクの始点から途中まで渋滞しているリンク)についても、渋滞の位置や渋滞度の案内(S10)及び渋滞を考慮したコスト補正(S20)については行うようにするのが望ましい。また、交通情報DB32は、外部のVICSセンタやプローブセンタから取得した現在の交通状況を示す交通情報について格納されている(図2参照)。
そして、以下のS3以降の処理は前記S1で取得した案内経路に含まれるリンクの内、特に案内対象となるリンク(例えば液晶ディスプレイ15に表示された地図画像に含まれるリンク)を対象にして、リンク毎に実施される。そして、対象となる全てのリンクに対してS3以降の処理を実行した後に当該交通情報案内処理プログラムを終了する。尚、案内経路に含まれる全てのリンクを対象としてS3以降の処理を実施しても良い。
先ず、S3においてCPU41は、前記S2で取得した渋滞情報に基づいて、処理対象のリンクが渋滞の発生している渋滞リンクであるか否か判定する。進行方向(上り、下り)毎に渋滞情報が区分されている場合には、特にリンクの車両の進行方向に対応する方向で渋滞が発生しているリンクであるか否かを判定する。
また、渋滞が発生している渋滞リンクか否かを判定する場合には、判定に用いる交通情報の種類によって判定基準を変えるのが望ましい。即ち、渋滞が発生している区間を特定する交通情報に基づいて判定する場合には、上述したようにリンク全体で渋滞が発生しているリンク、或いはリンクの一部区間のみで渋滞が発生しているリンクを渋滞リンクと判定する。一方、渋滞が発生している区間に加えて渋滞度合いを特定する交通情報に基づいて判断する場合には、特に渋滞度合いが閾値以上(例えば『渋滞』、『混雑』、『空き』の3段階評価であれば『混雑』以上)のリンクを渋滞リンクと判定しても良い。また、交通情報としてリンクの旅行時間や交通量を取得して判定する場合には、旅行時間や交通量が閾値以上のリンクを渋滞リンクと判定しても良い。
そして、処理対象のリンクが渋滞リンクであると判定された場合(S3:YES)にはS4へと移行する。それに対して、処理対象のリンクが渋滞リンクでないと判定された場合(S3:NO)には、処理対象のリンクを新たなリンクへと切り替えて再度S3の処理を実行する。
S4においてCPU41は、リンクデータ33を用いて処理対象のリンクが片側2車線以上のリンクであるか否か判定する。尚、処理対象のリンクが片側2車線以上のリンクであるか否かは、予め地図情報に含まれる道路毎に具体的な車線数を記憶しておいて判定しても良いし、道路種別から判定しても良い。また、地図情報において道路の車線数が複数車線である区間に対してフラグを付与し、該フラグから判定しても良い。
そして、処理対象のリンクが片側2車線以上のリンクであると判定された場合(S4:YES)にはS5へと移行する。それに対して、処理対象のリンクが片側1車線のリンクであると判定された場合(S4:NO)には、処理対象のリンクで発生している渋滞は案内経路を走行する車両に影響する渋滞であると推定し、S10へと移行する。
S5においてCPU41は、リンクデータ33を用いて処理対象のリンクの車両の進行方向終点に分岐点があるか否か判定する。尚、3叉路の分岐点のみを対象としても良いし、4叉路以上の分岐点も含めても良い。
そして、処理対象のリンクの車両の進行方向終点に分岐点があると判定された場合(S5:YES)にはS6へと移行する。それに対して、処理対象のリンクの車両の進行方向終点に分岐点がないと判定された場合(S5:NO)には、処理対象のリンクで発生している渋滞は案内経路を走行する車両に影響する渋滞であると推定し、S10へと移行する。
S6においてCPU41は、リンクデータ33及び前記S2で取得した渋滞情報を用いて、処理対象のリンクの車両の進行方向終点にある分岐点に接続された他のリンク(以下、接続リンクという)が、渋滞が発生しているリンクと渋滞が発生していないリンクとを各1以上含むか否か判定する。例えば、図4に示すように処理対象のリンク51の終点に3叉路の分岐点52がある場合には、分岐点52に接続するリンク53とリンク54の一方が渋滞しており他方が渋滞していない場合に、接続リンクが、渋滞が発生しているリンクと渋滞が発生していないリンクとを各1以上含むと判定される。但し、接続リンクが渋滞情報の提供の対象となっていないリンクである場合については、接続リンクの更に先に接続されるリンクにおいて渋滞が発生している場合に、接続リンクにおいても渋滞が発生しているとみなしても良い。
そして、接続リンクが、渋滞が発生しているリンクと渋滞が発生していないリンクとを各1以上含むと判定された場合(S6:YES)にはS7へと移行する。それに対して、接続リンクが、渋滞が発生しているリンクと渋滞が発生していないリンクとを各1以上含まないと判定された場合(S6:NO)には、処理対象のリンクで発生している渋滞は案内経路を走行する車両に影響する渋滞であると推定し、S10へと移行する。
次にS7においてCPU41は、接続リンクの内、特に分岐点で車両が退出(進行)するリンク(以下、退出リンクという)が、渋滞していないか否か判定する。例えば、図4に示すように処理対象のリンク51から分岐点52をリンク53へと退出する案内経路が設定されている場合には、リンク53が退出リンクとなる。従って、リンク53が渋滞していないか否か判定される。
そして、退出リンクが渋滞していないと判定された場合(S7:YES)にはS8へと移行する。それに対して、退出リンクが渋滞していると判定された場合(S7:NO)には、処理対象のリンクで発生している渋滞は案内経路を走行する車両に影響する渋滞であると推定し、S10へと移行する。
S8においてCPU41は、接続リンクの内、特に渋滞が発生しているリンク(以下、渋滞発生リンクという)が、特定の地点へと進入するリンクであるか否か判定する。例えば、図5に示すように処理対象のリンク51から分岐点52をリンク53へと退出する案内経路が設定されている場合であって、リンク53が渋滞しておらず、一方でリンク54において渋滞が発生している場合には、リンク54が特定の地点へと進入するリンクであるか否か判定する。尚、特定の地点は、ランプ(取付道路)、ジャンクション、インターチェンジ、サービスエリア、パーキングエリア、駐車場、施設内道路のいずれかとする。渋滞発生リンク自身がランプ、ジャンクション又はインターチェンジにおける退出道路、或いは施設内道路である場合についても、渋滞発生リンクが特定の地点へと進入するリンクであると判定される。
そして、渋滞発生リンクが特定の地点へと進入するリンクであると判定された場合(S8:YES)には、S9へと移行する。それに対して、渋滞発生リンクが特定の地点へと進入するリンクでないと判定された場合(S8:NO)には、処理対象のリンクで発生している渋滞は案内経路を走行する車両に影響する渋滞であると推定し、S10へと移行する。
S9においてCPU41は、分岐の退出方向次第では渋滞の影響が極めて小さい経路も存在するので、車両が分岐において退出するリンクに応じた走行支援を行う。具体的には、CPU41は処理対象のリンクで発生している渋滞は、一部の車線(渋滞発生リンクが接続された方向にある車線)のみが渋滞していると推測する。従って、処理対象のリンクから処理対象のリンクの終点にある分岐点へと進入し、該分岐点から渋滞が発生していないリンクへと退出する場合(例えば、そのように進む経路が現在のナビゲーション装置1において案内経路として設定されている場合、或いは案内経路が設定されていない場合において、そのように進む経路が道なりの経路である場合)については、渋滞しない車線を走行可能であることから、経路の走行に渋滞は影響しないと推定する。従って、車両が当該経路を走行する場合には処理対象のリンクに含まれる渋滞を案内対象から除き、渋滞を案内しないようにする。尚、案内としては、液晶ディスプレイ15による表示案内やスピーカ16による音声案内を含む。また、「渋滞を案内しない」とは、渋滞に関する案内を何も行わない場合に加えて、一部の案内のみを行わない(例えば音声案内は行わないが、表示案内は行う)ようにする場合についても含む。
また、前記S9では処理対象のリンクに含まれる渋滞を避ける為の車線を案内しても良い。具体的には、処理対象のリンクに含まれる車線の内、最も渋滞発生リンクが接続された方向にある車線が渋滞していると推定されるので、当該車線以外の車線を走行するように案内する。例えば、図6に示す例では渋滞発生リンクであるリンク54が分岐点52の左側に接続されているので、処理対象のリンク51は図9に示すように最も左側の車線のみが渋滞していると推定される。従って、「左側の車線を避けて走行してください」、或いは「右側の車線を走行してください」との案内を行う。更に、液晶ディスプレイ15に車線毎に区分した道路を表示し、渋滞していると推定される車線に対して渋滞を示す表示を行い、一方で空いていると推定される車線は空いていることを示す表示を行っても良い。また、渋滞していると推定される車線に対する案内と、空いていると推定される車線に対する案内のいずれか一方のみを行っても良い。更に、液晶ディスプレイ15への表示ではなくスピーカ16から出力される案内音声により、渋滞していると推定される車線と空いていると推定される車線を識別可能に案内しても良い。
一方、S10においてCPU41は、処理対象のリンクに含まれる渋滞を考慮した走行支援を行う。具体的には、液晶ディスプレイ15に表示された地図画像において、処理対象のリンクが渋滞していることを示すマークを重畳して表示する。また、スピーカ16を用いて渋滞の位置や渋滞度の案内を出力しても良い。
次に、ナビゲーション装置1において実行する経路探索処理プログラムについて図6に基づき説明する。図6は本実施形態に係る経路探索処理プログラムのフローチャートである。ここで、経路探索処理プログラムはナビゲーション装置1において所定の操作を受け付けた場合に実行され、目的地までの案内経路を探索するプログラムである。
経路探索処理プログラムではS11において、CPU41は、探索条件として出発地及び目的地を取得する。尚、出発地は車両の現在位置としても良いし、ユーザにより指定された任意の地点(例えば自宅)としても良い。また、目的地は操作部14において受け付けたユーザの操作(例えば施設の検索や選択操作)に基づいて取得する。
次に、S12においてCPU41は、交通情報DB32から出発地から目的地までの周辺エリアの交通情報を読み出す。特に、本実施形態では交通情報として渋滞が発生している渋滞リンクを特定する渋滞情報について読み出す。尚、交通情報DB32は、外部のVICSセンタやプローブセンタから取得した現在の交通状況を示す交通情報について格納されている(図2参照)。具体的な交通情報の詳細については、前記S2と同様である。
そして、以下のS13~S20の処理はリンクコストの付与(算出)対象となるリンク毎(進行方向毎にリンクが分かれていない場合にはリンク且つ進行方向毎、以下同じ)に実行され、リンクコストの付与対象となる全てのリンクを対象としてS13~S20の処理が実行された後に、S21へと移行する。尚、リンクコストの付与対象となるリンクは出発地から目的地までの間にある推奨経路を構成し得るリンクが該当する。
先ず、S13においてCPU41は、前記S12で取得した渋滞情報に基づいて処理対象のリンクが渋滞の発生している渋滞リンクであるか否か判定する。具体的な判定態様については、前記S3と同様である。
そして、処理対象のリンクが渋滞リンクであると判定された場合(S13:YES)にはS14へと移行する。それに対して、処理対象のリンクが渋滞リンクでないと判定された場合(S13:NO)には、処理対象のリンクを新たなリンクへと切り替えて再度S13の処理を実行する。
S14においてCPU41は、リンクデータ33を用いて処理対象のリンクが片側2車線以上のリンクであるか否か判定する。尚、前記S4と同様に、処理対象のリンクが片側2車線以上のリンクであるか否かは、予め地図情報に含まれる道路毎に具体的な車線数を記憶しておいて判定しても良いし、道路種別から判定しても良い。また、地図情報において道路の車線数が複数車線である区間に対してフラグを付与し、該フラグから判定しても良い。
そして、処理対象のリンクが片側2車線以上のリンクであると判定された場合(S14:YES)にはS15へと移行する。それに対して、処理対象のリンクが片側1車線のリンクであると判定された場合(S14:NO)には、処理対象のリンクで発生している渋滞は当該リンクを走行する車両に影響する渋滞であると推定し、S20へと移行する。
S15においてCPU41は、リンクデータ33を用いて処理対象のリンクの進行方向終点に分岐点があるか否か判定する。尚、3叉路の分岐点のみを対象としても良いし、4叉路以上の分岐点も含めても良い。
そして、処理対象のリンクの進行方向終点に分岐点があると判定された場合(S15:YES)にはS16へと移行する。それに対して、処理対象のリンクの進行方向終点に分岐点がないと判定された場合(S15:NO)には、処理対象のリンクで発生している渋滞は当該リンクを走行する車両に影響する渋滞であると推定し、S20へと移行する。
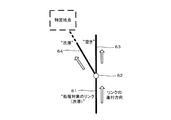
S16においてCPU41は、リンクデータ33及び前記S12で取得した渋滞情報を用いて、処理対象のリンクの進行方向終点にある分岐点に接続された他のリンクである接続リンクが、渋滞が発生しているリンクと渋滞が発生していないリンクとを各1以上含むか否か判定する。例えば、図7に示すように処理対象のリンク61の終点に3叉路の分岐点62がある場合には、分岐点62に接続するリンク63とリンク64の一方が渋滞しており他方が渋滞していない場合に、接続リンクが、渋滞が発生しているリンクと渋滞が発生していないリンクとを各1以上含むと判定される。但し、前記S6と同様に、接続リンクが渋滞情報の提供の対象となっていないリンクである場合については、接続リンクの更に先に接続されるリンクにおいて渋滞が発生している場合に、接続リンクにおいても渋滞が発生しているとみなしても良い。
そして、接続リンクが、渋滞が発生しているリンクと渋滞が発生していないリンクとを各1以上含むと判定された場合(S16:YES)にはS17へと移行する。それに対して、接続リンクが、渋滞が発生しているリンクと渋滞が発生していないリンクとを各1以上含まないと判定された場合(S16:NO)には、処理対象のリンクで発生している渋滞は当該リンクを走行する車両に影響する渋滞であると推定し、S20へと移行する。
次にS17においてCPU41は、接続リンクの内、特に分岐点で退出可能なリンク(以下、退出可能リンクという)であって渋滞していないリンクが、少なくとも一以上あるか否か判定する。例えば、図7に示す例では、リンク61を走行する車両は分岐点62を介してリンク63とリンク64へとそれぞれ退出することが可能である。従って、リンク63とリンク64の少なくとも一方が渋滞していないか否か判定される。
そして、渋滞していない退出可能リンクが少なくとも一以上あると判定された場合(S17:YES)にはS18へと移行する。それに対して、渋滞していない退出可能リンクがないと判定された場合(S17:NO)には、処理対象のリンクで発生している渋滞は当該リンクを走行する車両に影響する渋滞であると推定し、S10へと移行する。
S18においてCPU41は、接続リンクの内、特に渋滞が発生しているリンク(以下、渋滞発生リンクという)が、特定の地点へと進入するリンクであるか否か判定する。例えば、図8に示すように処理対象のリンク61から退出可能なリンク63とリンク64の内、リンク63が渋滞しておらず、一方でリンク64において渋滞が発生している場合には、リンク64が特定の地点へと進入するリンクであるか否か判定する。尚、特定の地点は、ランプ(取付道路)、ジャンクション、インターチェンジ、サービスエリア、パーキングエリア、駐車場、施設内道路のいずれかとする。渋滞発生リンク自身がランプ、ジャンクション又はインターチェンジにおける退出道路、或いは施設内道路である場合についても、渋滞発生リンクが特定の地点へと進入するリンクであると判定される。
そして、渋滞発生リンクが特定の地点へと進入するリンクであると判定された場合(S18:YES)には、S19へと移行する。それに対して、渋滞発生リンクが特定の地点へと進入するリンクでないと判定された場合(S18:NO)には、処理対象のリンクで発生している渋滞は当該リンクを走行する車両に影響する渋滞であると推定し、S20へと移行する。
S19においてCPU41は、分岐の退出方向次第では渋滞の影響が極めて小さい経路も存在するので、分岐において退出するリンクに応じた走行支援を行う。具体的には、CPU41は処理対象のリンクから処理対象のリンクの終点にある分岐点へと進入し、該分岐点から渋滞が発生していないリンクへと退出する経路(即ち図8に示す例ではリンク61からリンク63へと進む経路)については、一部の車線(最も渋滞発生リンクが接続された方向にある車線)のみが渋滞しており、渋滞しない車線を走行可能であることから、経路の走行に渋滞は影響しないと推定する。従って、当該経路では処理対象のリンクについて渋滞によるコスト補正(コストの変動)を行わずにコストを付与する。例えば、リンク長、道路種別、車線数等からコストを算出して、処理対象のリンクに付与する。但し、経路の走行に渋滞が多少は影響すると推定し、コストを増加させても良い。その場合のコストの増加量は、後述する渋滞が発生しているリンクへと退出する場合よりも小さくするのが望ましい。例えば1.1倍にコスト値を補正する。
尚、前記S19においてCPU41は、処理対象のリンクから処理対象のリンクの終点にある分岐点へと進入し、該分岐点から渋滞が発生しているリンクへと退出する経路(即ち図8に示す例ではリンク61からリンク64へと進む経路)については、渋滞している車線を走行しなければならず、経路の走行に渋滞が影響すると推定する。従って、処理対象のリンクに含まれる渋滞を考慮して走行支援を行う。具体的には、処理対象のリンクについて渋滞によるコスト補正(コストの変動)を行ってコストを付与する。例えば渋滞度が『混雑』である場合には1.5倍にコスト値を補正し、渋滞度が『渋滞』である場合には2倍にコスト値を補正する。以上のように前記S19では、同一リンクであっても分岐点の退出方向毎に異なるコスト値が付与されることとなる。
一方、S20においてCPU41は、処理対象のリンクの終点にある分岐点をどの方向に退出するかに関わらず、渋滞している車線を走行しなければならず、経路の走行に渋滞が影響すると推定する。従って、処理対象のリンクに含まれる渋滞を考慮して走行支援を行う。具体的には、処理対象のリンクについて渋滞によるコスト補正(コストの変動)を行ってコストを付与する。例えば渋滞度が『混雑』である場合には1.5倍にコスト値を補正し、渋滞度が『渋滞』である場合には2倍にコスト値を補正する。
その後、S21においてCPU41は、前記S13~S20で各リンクに付与されたリンクコストに加えて、交差点(ノード)に対する経路として適正の程度を数値化した交差点コストや、走行に必要な費用の程度を数値化した料金コスト等についても算出し、算出された各探索コストを用いて推奨経路の探索を行う。具体的には、公知のダイクストラ法を用い、コスト値の合計が最小となる経路を推奨経路とする。また、推奨経路以外に探索条件を変えた他の候補経路(例えば距離優先、一般道優先、有料道優先で探索された経路)についても探索するように構成しても良い。その後、探索された推奨経路をナビゲーション装置1の案内経路に設定し、設定された案内経路に基づいて車両の走行案内を行う。即ち、本発明の走行支援手段には目的地までの経路を探索する経路探索に加えて、探索された経路に基づく走行案内についても含む。
以上詳細に説明した通り、本実施形態に係るナビゲーション装置1及びナビゲーション装置1で実行されるコンピュータプログラムでは、渋滞が発生している渋滞リンクを特定する渋滞情報を取得し(S2、S12)、渋滞リンクが片側2車線以上のリンクであって(S4、S14)、渋滞リンクの終点に分岐があって(S5、S15)、該分岐に接続する各リンクに渋滞が発生しているリンクと渋滞が発生していないリンクとを各1以上含む場合(S6、S16)には、該分岐において退出するリンクに応じた走行支援を行う(S9、S19)ので、渋滞する車線を特定する情報を含まない渋滞情報を用いた場合であっても、道路形状に基づいて渋滞リンクに含まれる複数の車線の内の一部の車線のみが渋滞している状況が生じていることを推定することが可能となる。その結果、渋滞リンクで発生している渋滞が実際にユーザに影響するか否かについて考慮した走行支援を行うことが可能であり、ユーザにとってより適切な走行支援を行うことが可能となる。
尚、本発明は前記実施形態に限定されるものではなく、本発明の要旨を逸脱しない範囲内で種々の改良、変形が可能であることは勿論である。
例えば、本実施形態では走行支援として交通情報の案内及び推奨経路の探索を挙げているが、他の走行支援に適用することも可能である。例えば、車両の運転操作の少なくとも一部を自動制御により行う自動運転支援に適用することも可能である。自動運転支援の適用方法としては、例えば自動運転支援により走行する経路を探索する場合において経路探索処理プログラム(図6)を実施することが可能である。また、自動運転支援により走行する車線を決定する場合において交通情報案内処理プログラム(図3)を実施し、S9において渋滞を避ける車線を走行する車両制御を行うこと等が考えられる。
例えば、本実施形態では走行支援として交通情報の案内及び推奨経路の探索を挙げているが、他の走行支援に適用することも可能である。例えば、車両の運転操作の少なくとも一部を自動制御により行う自動運転支援に適用することも可能である。自動運転支援の適用方法としては、例えば自動運転支援により走行する経路を探索する場合において経路探索処理プログラム(図6)を実施することが可能である。また、自動運転支援により走行する車線を決定する場合において交通情報案内処理プログラム(図3)を実施し、S9において渋滞を避ける車線を走行する車両制御を行うこと等が考えられる。
また、本実施形態では渋滞リンクや接続リンクの道路種別について考慮していないが、道路種別について考慮するようにしても良い。例えば、渋滞リンクが本線車道であって、渋滞が発生している接続リンクが本線車道から退出するリンクであり、渋滞が発生していない接続リンクが本線車道と継続する本線車道である場合において、上述した分岐において車両が退出するリンクに応じた走行支援(図3、図6)を行うようにしても良い。
例えば、本実施形態では前記S8及びS18の判定条件となる特定の地点を、ランプ(取付道路)、ジャンクション、インターチェンジ、サービスエリア、パーキングエリア、駐車場、施設内道路のいずれかとしているが、渋滞を生じさせる原因となり得る地点であれば、それ以外の地点としても良い。
また、本発明はナビゲーション装置以外に、交通情報の案内機能や経路探索機能を有する各種装置に対して適用することが可能である。例えば、携帯電話機、スマートフォン、タブレット型端末、パーソナルコンピュータ等(以下、携帯端末等という)に適用することも可能である。また、サーバと携帯端末等から構成されるシステムに対しても適用することが可能となる。その場合には、上述した交通情報案内処理プログラム(図3)や経路探索処理プログラム(図6)の各ステップは、サーバと携帯端末等のいずれが実施する構成としても良い。
また、本発明に係る走行支援装置を具体化した実施例について上記に説明したが、交通情報案内装置は以下の構成を有することも可能であり、その場合には以下の効果を奏する。
例えば、第1の構成は以下のとおりである。
渋滞が発生している渋滞リンクを特定する渋滞情報を取得する渋滞情報取得手段(41)と、前記渋滞情報に基づく走行支援を行う走行支援手段(41)と、前記渋滞リンクが片側2車線以上であって、前記渋滞リンクの終点に分岐があるか否か判定する道路形状判定手段(41)と、前記渋滞リンクが片側2車線以上であって、前記渋滞リンクの終点に分岐があると判定された場合に、該分岐に接続する他のリンクである接続リンクに渋滞が発生しているリンクと渋滞が発生していないリンクとを各1以上含むか否か判定する渋滞判定手段(41)と、を有し、前記走行支援手段は、前記接続リンクに渋滞が発生しているリンクと渋滞が発生していないリンクとを各1以上含むと判定された場合に、前記分岐において車両が退出するリンクに応じた走行支援を行う。
上記構成を有する走行支援装置によれば、渋滞する車線を特定する情報を含まない渋滞情報を用いた場合であっても、道路形状に基づいて渋滞リンクに含まれる複数の車線の内の一部の車線のみが渋滞している状況が生じていることを推定することが可能となる。その結果、渋滞リンクで発生している渋滞が実際にユーザに影響するか否かについて考慮した走行支援を行うことが可能であり、ユーザにとってより適切な走行支援を行うことが可能となる。
渋滞が発生している渋滞リンクを特定する渋滞情報を取得する渋滞情報取得手段(41)と、前記渋滞情報に基づく走行支援を行う走行支援手段(41)と、前記渋滞リンクが片側2車線以上であって、前記渋滞リンクの終点に分岐があるか否か判定する道路形状判定手段(41)と、前記渋滞リンクが片側2車線以上であって、前記渋滞リンクの終点に分岐があると判定された場合に、該分岐に接続する他のリンクである接続リンクに渋滞が発生しているリンクと渋滞が発生していないリンクとを各1以上含むか否か判定する渋滞判定手段(41)と、を有し、前記走行支援手段は、前記接続リンクに渋滞が発生しているリンクと渋滞が発生していないリンクとを各1以上含むと判定された場合に、前記分岐において車両が退出するリンクに応じた走行支援を行う。
上記構成を有する走行支援装置によれば、渋滞する車線を特定する情報を含まない渋滞情報を用いた場合であっても、道路形状に基づいて渋滞リンクに含まれる複数の車線の内の一部の車線のみが渋滞している状況が生じていることを推定することが可能となる。その結果、渋滞リンクで発生している渋滞が実際にユーザに影響するか否かについて考慮した走行支援を行うことが可能であり、ユーザにとってより適切な走行支援を行うことが可能となる。
また、第2の構成は以下のとおりである。
前記走行支援手段は、前記渋滞リンクが本線車道であって、渋滞が発生している接続リンクが前記本線車道から退出するリンクであり、渋滞が発生していない接続リンクが前記本線車道と継続する本線車道である場合に、前記分岐において車両が退出するリンクに応じた走行支援を行う。
上記構成を有する走行支援装置によれば、本線車道から退出するリンクにおいて渋滞が生じている場合において、本線車道に含まれる複数の車線の内の一部の車線のみが渋滞している状況が生じていることを推定し、分岐点において退出するリンクに応じた適切な走行支援を行うことが可能となる。
前記走行支援手段は、前記渋滞リンクが本線車道であって、渋滞が発生している接続リンクが前記本線車道から退出するリンクであり、渋滞が発生していない接続リンクが前記本線車道と継続する本線車道である場合に、前記分岐において車両が退出するリンクに応じた走行支援を行う。
上記構成を有する走行支援装置によれば、本線車道から退出するリンクにおいて渋滞が生じている場合において、本線車道に含まれる複数の車線の内の一部の車線のみが渋滞している状況が生じていることを推定し、分岐点において退出するリンクに応じた適切な走行支援を行うことが可能となる。
また、第3の構成は以下のとおりである。
前記本線車道から退出するリンクは、特定の地点へ進入する為のリンクである。
上記構成を有する走行支援装置によれば、本線車道から退出して特定の地点へと向かうリンクにおいて渋滞が生じている場合において、本線車道に含まれる複数の車線の内の一部の車線のみが渋滞している状況が生じていることを推定し、分岐点において退出するリンクに応じた適切な走行支援を行うことが可能となる。
前記本線車道から退出するリンクは、特定の地点へ進入する為のリンクである。
上記構成を有する走行支援装置によれば、本線車道から退出して特定の地点へと向かうリンクにおいて渋滞が生じている場合において、本線車道に含まれる複数の車線の内の一部の車線のみが渋滞している状況が生じていることを推定し、分岐点において退出するリンクに応じた適切な走行支援を行うことが可能となる。
また、第4の構成は以下のとおりである。
前記特定の地点は、ランプ、ジャンクション、インターチェンジ、サービスエリア、パーキングエリア、駐車場のいずれかである。
上記構成を有する走行支援装置によれば、本線車道から退出して特に渋滞の発生原因となり易いランプ、ジャンクション、インターチェンジ、サービスエリア、パーキングエリア、駐車場などへ向かうリンクにおいて渋滞が生じている場合において、本線車道に含まれる複数の車線の内の一部の車線のみが渋滞している状況が生じていることを推定し、分岐点において退出するリンクに応じた適切な走行支援を行うことが可能となる。
前記特定の地点は、ランプ、ジャンクション、インターチェンジ、サービスエリア、パーキングエリア、駐車場のいずれかである。
上記構成を有する走行支援装置によれば、本線車道から退出して特に渋滞の発生原因となり易いランプ、ジャンクション、インターチェンジ、サービスエリア、パーキングエリア、駐車場などへ向かうリンクにおいて渋滞が生じている場合において、本線車道に含まれる複数の車線の内の一部の車線のみが渋滞している状況が生じていることを推定し、分岐点において退出するリンクに応じた適切な走行支援を行うことが可能となる。
また、第5の構成は以下のとおりである。
前記本線車道から退出するリンクは、ランプ、ジャンクション又はインターチェンジにおける退出道路、施設内道路のいずれかである。
上記構成を有する走行支援装置によれば、特に渋滞となり易いランプ、ジャンクション又はインターチェンジにおける退出道路、施設内道路において渋滞が生じている場合において、本線車道に含まれる複数の車線の内の一部の車線のみが渋滞している状況が生じていることを推定し、分岐点において退出するリンクに応じた適切な走行支援を行うことが可能となる。
前記本線車道から退出するリンクは、ランプ、ジャンクション又はインターチェンジにおける退出道路、施設内道路のいずれかである。
上記構成を有する走行支援装置によれば、特に渋滞となり易いランプ、ジャンクション又はインターチェンジにおける退出道路、施設内道路において渋滞が生じている場合において、本線車道に含まれる複数の車線の内の一部の車線のみが渋滞している状況が生じていることを推定し、分岐点において退出するリンクに応じた適切な走行支援を行うことが可能となる。
また、第6の構成は以下のとおりである。
前記走行支援は、リンクにおける渋滞の案内を含み、前記走行支援手段(41)は、車両が前記分岐から前記渋滞が発生していないリンクへと退出する場合については、前記渋滞リンクにおける渋滞を案内しない又は前記渋滞リンクにおける渋滞を避ける為の車線を案内する。
上記構成を有する走行支援装置によれば、ユーザに影響のない渋滞について案内が行われることを防止することが可能であり、ユーザにとってより適切な交通情報の案内を行うことが可能となる。また、渋滞の影響がない走行を行う為の車線を案内すれば、ユーザが渋滞の影響を受けずに走行する為の支援を行うことが可能となる。
前記走行支援は、リンクにおける渋滞の案内を含み、前記走行支援手段(41)は、車両が前記分岐から前記渋滞が発生していないリンクへと退出する場合については、前記渋滞リンクにおける渋滞を案内しない又は前記渋滞リンクにおける渋滞を避ける為の車線を案内する。
上記構成を有する走行支援装置によれば、ユーザに影響のない渋滞について案内が行われることを防止することが可能であり、ユーザにとってより適切な交通情報の案内を行うことが可能となる。また、渋滞の影響がない走行を行う為の車線を案内すれば、ユーザが渋滞の影響を受けずに走行する為の支援を行うことが可能となる。
また、第7の構成は以下のとおりである。
前記走行支援手段は、前記渋滞リンクにおいて渋滞していると推定される車線と空いていると推定される車線とを識別する案内を行う。
上記構成を有する走行支援装置によれば、ユーザに渋滞の影響のない車線と影響のある車線とを識別して案内を行うことにより、ユーザが渋滞の影響を受けずに走行する為の支援を行うことが可能となる。
前記走行支援手段は、前記渋滞リンクにおいて渋滞していると推定される車線と空いていると推定される車線とを識別する案内を行う。
上記構成を有する走行支援装置によれば、ユーザに渋滞の影響のない車線と影響のある車線とを識別して案内を行うことにより、ユーザが渋滞の影響を受けずに走行する為の支援を行うことが可能となる。
また、第8の構成は以下のとおりである。
前記走行支援は、目的地までの経路を探索する経路探索を含み、前記走行支援手段(41)は、車両が前記分岐から前記渋滞が発生していないリンクへと退出する場合については、前記渋滞リンクにおける渋滞に基づくコストの変動を行わずに経路の探索を行う。
上記構成を有する走行支援装置によれば、特に目的地までの経路探索処理を行う場合において、ユーザに影響のない渋滞を通り難く補正した経路が探索されることを防止することが可能であり、ユーザにとってより適切な推奨経路を提供することが可能となる。
前記走行支援は、目的地までの経路を探索する経路探索を含み、前記走行支援手段(41)は、車両が前記分岐から前記渋滞が発生していないリンクへと退出する場合については、前記渋滞リンクにおける渋滞に基づくコストの変動を行わずに経路の探索を行う。
上記構成を有する走行支援装置によれば、特に目的地までの経路探索処理を行う場合において、ユーザに影響のない渋滞を通り難く補正した経路が探索されることを防止することが可能であり、ユーザにとってより適切な推奨経路を提供することが可能となる。
また、第9の構成は以下のとおりである。
前記走行支援は、目的地までの経路を探索する経路探索を含み、前記走行支援手段(41)は、車両が前記分岐から前記渋滞が発生していないリンクへと退出する場合については、前記分岐から前記渋滞が発生しているリンクへと退出する場合を比較して、前記渋滞リンクにおける渋滞に基づくコストの変動を小さくして経路の探索を行う。
上記構成を有する走行支援装置によれば、特に目的地までの経路探索処理を行う場合において、ユーザに影響のない渋滞を通り難く補正した経路が探索されることを防止することが可能であり、ユーザにとってより適切な推奨経路を提供することが可能となる。
前記走行支援は、目的地までの経路を探索する経路探索を含み、前記走行支援手段(41)は、車両が前記分岐から前記渋滞が発生していないリンクへと退出する場合については、前記分岐から前記渋滞が発生しているリンクへと退出する場合を比較して、前記渋滞リンクにおける渋滞に基づくコストの変動を小さくして経路の探索を行う。
上記構成を有する走行支援装置によれば、特に目的地までの経路探索処理を行う場合において、ユーザに影響のない渋滞を通り難く補正した経路が探索されることを防止することが可能であり、ユーザにとってより適切な推奨経路を提供することが可能となる。
1 ナビゲーション装置
15 液晶ディスプレイ
16 スピーカ
31 地図情報DB
32 交通情報DB
41 CPU
42 RAM
43 ROM
15 液晶ディスプレイ
16 スピーカ
31 地図情報DB
32 交通情報DB
41 CPU
42 RAM
43 ROM
Claims (10)
- 渋滞が発生している渋滞リンクを特定する渋滞情報を取得する渋滞情報取得手段と、
前記渋滞情報に基づく走行支援を行う走行支援手段と、
前記渋滞リンクが片側2車線以上であって、前記渋滞リンクの終点に分岐があるか否か判定する道路形状判定手段と、
前記渋滞リンクが片側2車線以上であって、前記渋滞リンクの終点に分岐があると判定された場合に、該分岐に接続する他のリンクである接続リンクに渋滞が発生しているリンクと渋滞が発生していないリンクとを各1以上含むか否か判定する渋滞判定手段と、を有し、
前記走行支援手段は、前記接続リンクに渋滞が発生しているリンクと渋滞が発生していないリンクとを各1以上含むと判定された場合に、前記分岐において車両が退出するリンクに応じた走行支援を行う走行支援装置。 - 前記走行支援手段は、前記渋滞リンクが本線車道であって、渋滞が発生している接続リンクが前記本線車道から退出するリンクであり、渋滞が発生していない接続リンクが前記本線車道と継続する本線車道である場合に、前記分岐において車両が退出するリンクに応じた走行支援を行う請求項1に記載の走行支援装置。
- 前記本線車道から退出するリンクは、特定の地点へ進入する為のリンクである請求項2に記載の走行支援装置。
- 前記特定の地点は、ランプ、ジャンクション、インターチェンジ、サービスエリア、パーキングエリア、駐車場のいずれかである請求項3に記載の走行支援装置。
- 前記本線車道から退出するリンクは、ランプ、ジャンクション又はインターチェンジにおける退出道路、施設内道路のいずれかである請求項2に記載の走行支援装置。
- 前記走行支援は、リンクにおける渋滞の案内を含み、
前記走行支援手段は、車両が前記分岐から前記渋滞が発生していないリンクへと退出する場合については、前記渋滞リンクにおける渋滞を案内しない又は前記渋滞リンクにおける渋滞を避ける為の車線を案内する請求項1乃至請求項5のいずれかに記載の走行支援装置。 - 前記走行支援手段は、前記渋滞リンクにおいて渋滞していると推定される車線と空いていると推定される車線とを識別する案内を行う請求項6に記載の走行支援装置。
- 前記走行支援は、目的地までの経路を探索する経路探索を含み、
前記走行支援手段は、車両が前記分岐から前記渋滞が発生していないリンクへと退出する場合については、前記渋滞リンクにおける渋滞に基づくコストの変動を行わずに経路の探索を行う請求項1乃至請求項5のいずれかに記載の走行支援装置。 - 前記走行支援は、目的地までの経路を探索する経路探索を含み、
前記走行支援手段は、車両が前記分岐から前記渋滞が発生していないリンクへと退出する場合については、前記分岐から前記渋滞が発生しているリンクへと退出する場合を比較して、前記渋滞リンクにおける渋滞に基づくコストの変動を小さくして経路の探索を行う請求項1乃至請求項5のいずれかに記載の走行支援装置。 - コンピュータを、
渋滞が発生している渋滞リンクを特定する渋滞情報を取得する渋滞情報取得手段と、
前記渋滞情報に基づく走行支援を行う走行支援手段と、
前記渋滞リンクが片側2車線以上であって、前記渋滞リンクの終点に分岐があるか否か判定する道路形状判定手段と、
前記渋滞リンクが片側2車線以上であって、前記渋滞リンクの終点に分岐があると判定された場合に、該分岐に接続する他のリンクである接続リンクに渋滞が発生しているリンクと渋滞が発生していないリンクとを各1以上含むか否か判定する渋滞判定手段と、して機能させる為のコンピュータプログラムであって、
前記走行支援手段は、前記接続リンクに渋滞が発生しているリンクと渋滞が発生していないリンクとを各1以上含むと判定された場合に、前記分岐において車両が退出するリンクに応じた走行支援を行うコンピュータプログラム。
Priority Applications (4)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| US16/478,827 US20200056903A1 (en) | 2017-02-17 | 2018-02-08 | Driving support system and computer program |
| JP2018568149A JPWO2018151005A1 (ja) | 2017-02-17 | 2018-02-08 | 走行支援装置及びコンピュータプログラム |
| CN201880009189.7A CN110268227A (zh) | 2017-02-17 | 2018-02-08 | 行驶辅助装置和计算机程序 |
| EP18754488.7A EP3553472A4 (en) | 2017-02-17 | 2018-02-08 | DRIVING ASSISTANCE DEVICE AND COMPUTER PROGRAM |
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2017-028032 | 2017-02-17 | ||
| JP2017028032 | 2017-02-17 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| WO2018151005A1 true WO2018151005A1 (ja) | 2018-08-23 |
Family
ID=63169449
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| PCT/JP2018/004387 WO2018151005A1 (ja) | 2017-02-17 | 2018-02-08 | 走行支援装置及びコンピュータプログラム |
Country Status (5)
| Country | Link |
|---|---|
| US (1) | US20200056903A1 (ja) |
| EP (1) | EP3553472A4 (ja) |
| JP (1) | JPWO2018151005A1 (ja) |
| CN (1) | CN110268227A (ja) |
| WO (1) | WO2018151005A1 (ja) |
Families Citing this family (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP6704890B2 (ja) * | 2017-11-08 | 2020-06-03 | 本田技研工業株式会社 | 車両制御装置、車両制御方法、およびプログラム |
| US11359927B2 (en) * | 2018-07-16 | 2022-06-14 | Toyota Research Institute, Inc. | Mapping of temporal roadway conditions |
| CN112179372B (zh) * | 2020-10-09 | 2021-08-27 | 深圳市金沃德科技有限公司 | 基于5g人工智能车载终端设备 |
| JP2022149325A (ja) * | 2021-03-25 | 2022-10-06 | カシオ計算機株式会社 | 情報処理装置、情報処理システム、情報処理方法及びプログラム |
| CN113295177B (zh) * | 2021-04-30 | 2022-08-19 | 长安大学 | 基于实时路况信息的动态路径规划方法及系统 |
| CN114715156B (zh) * | 2022-05-18 | 2022-10-14 | 北京小马智卡科技有限公司 | 控制车辆进出匝道的方法、装置、设备和存储介质 |
Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH11160081A (ja) | 1997-11-27 | 1999-06-18 | Alpine Electron Inc | ナビゲーション方法 |
| JP2004354086A (ja) * | 2003-05-27 | 2004-12-16 | Aisin Aw Co Ltd | ナビゲーションシステム |
| JP2005274224A (ja) * | 2004-03-23 | 2005-10-06 | Kenwood Corp | ナビゲーション装置、ナビゲーション方法及びプログラム |
Family Cites Families (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2005037168A (ja) * | 2003-07-16 | 2005-02-10 | Aisin Aw Co Ltd | 自動車用ナビゲーション方法 |
| JP4951432B2 (ja) * | 2007-07-23 | 2012-06-13 | クラリオン株式会社 | ナビゲーション装置 |
| JP5662959B2 (ja) * | 2012-03-21 | 2015-02-04 | アイシン・エィ・ダブリュ株式会社 | 交通情報作成装置、交通情報作成方法及びプログラム |
| JP5860831B2 (ja) * | 2013-03-29 | 2016-02-16 | アイシン・エィ・ダブリュ株式会社 | 走行支援システム、走行支援方法及びコンピュータプログラム |
| US9014977B2 (en) * | 2013-06-21 | 2015-04-21 | Here Global B.V. | Method and apparatus for route determination based on one or more non-travel lanes |
-
2018
- 2018-02-08 CN CN201880009189.7A patent/CN110268227A/zh active Pending
- 2018-02-08 WO PCT/JP2018/004387 patent/WO2018151005A1/ja unknown
- 2018-02-08 JP JP2018568149A patent/JPWO2018151005A1/ja active Pending
- 2018-02-08 US US16/478,827 patent/US20200056903A1/en not_active Abandoned
- 2018-02-08 EP EP18754488.7A patent/EP3553472A4/en not_active Withdrawn
Patent Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH11160081A (ja) | 1997-11-27 | 1999-06-18 | Alpine Electron Inc | ナビゲーション方法 |
| JP2004354086A (ja) * | 2003-05-27 | 2004-12-16 | Aisin Aw Co Ltd | ナビゲーションシステム |
| JP2005274224A (ja) * | 2004-03-23 | 2005-10-06 | Kenwood Corp | ナビゲーション装置、ナビゲーション方法及びプログラム |
Non-Patent Citations (1)
| Title |
|---|
| See also references of EP3553472A4 |
Also Published As
| Publication number | Publication date |
|---|---|
| JPWO2018151005A1 (ja) | 2019-11-07 |
| US20200056903A1 (en) | 2020-02-20 |
| EP3553472A1 (en) | 2019-10-16 |
| CN110268227A (zh) | 2019-09-20 |
| EP3553472A4 (en) | 2020-01-15 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6488594B2 (ja) | 自動運転支援システム、自動運転支援方法及びコンピュータプログラム | |
| JP6467773B2 (ja) | 経路探索システム、経路探索方法及びコンピュータプログラム | |
| WO2018151005A1 (ja) | 走行支援装置及びコンピュータプログラム | |
| JP6197691B2 (ja) | 自動運転支援システム、自動運転支援方法及びコンピュータプログラム | |
| JP6172283B2 (ja) | 経路探索システム、経路探索方法及びコンピュータプログラム | |
| WO2016035485A1 (ja) | 自動運転支援システム、自動運転支援方法及びコンピュータプログラム | |
| EP2453207A2 (en) | Travel guidance device, travel guidance method, and computer program | |
| WO2018061619A1 (ja) | 経路探索装置、経路探索システム及びコンピュータプログラム | |
| US20130024109A1 (en) | Travel guidance system, travel guidance apparatus, travel guidance method, and computer program | |
| WO2014034327A1 (ja) | 経路探索システム、経路探索装置、経路探索方法及びコンピュータプログラム | |
| JP2017041038A (ja) | 経路探索システム、経路探索方法及びコンピュータプログラム | |
| JP2017032654A (ja) | 情報案内システム、情報案内方法及びコンピュータプログラム | |
| US8942924B2 (en) | Travel guidance system, travel guidance apparatus, travel guidance method, and computer program | |
| JP6597265B2 (ja) | 移動案内システム、移動案内方法及びコンピュータプログラム | |
| JP5716565B2 (ja) | 信号機増減検出システム、信号機増減検出装置、信号機増減検出方法及びコンピュータプログラム | |
| US11656085B2 (en) | Route searching device and computer program | |
| JP2018021887A (ja) | 経路探索装置及びコンピュータプログラム | |
| JP2018063658A (ja) | 走行計画生成装置及びコンピュータプログラム | |
| JP6855972B2 (ja) | 走行支援装置及びコンピュータプログラム | |
| JP6375859B2 (ja) | 経路探索システム、経路探索方法及びコンピュータプログラム | |
| JP5531968B2 (ja) | 経路探索装置、経路探索方法及びコンピュータプログラム | |
| JP2018025404A (ja) | 交通情報案内装置及びコンピュータプログラム | |
| JP2009002885A (ja) | ナビゲーション装置 | |
| JP6405929B2 (ja) | 経路探索システム、経路探索方法及びコンピュータプログラム | |
| JP2018036134A (ja) | 走行案内装置及びコンピュータプログラム |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| 121 | Ep: the epo has been informed by wipo that ep was designated in this application |
Ref document number: 18754488 Country of ref document: EP Kind code of ref document: A1 |
|
| ENP | Entry into the national phase |
Ref document number: 2018568149 Country of ref document: JP Kind code of ref document: A |
|
| ENP | Entry into the national phase |
Ref document number: 2018754488 Country of ref document: EP Effective date: 20190709 |
|
| NENP | Non-entry into the national phase |
Ref country code: DE |