JP5073052B2 - 誤り訂正回路及びディスク記憶装置 - Google Patents
誤り訂正回路及びディスク記憶装置 Download PDFInfo
- Publication number
- JP5073052B2 JP5073052B2 JP2010506723A JP2010506723A JP5073052B2 JP 5073052 B2 JP5073052 B2 JP 5073052B2 JP 2010506723 A JP2010506723 A JP 2010506723A JP 2010506723 A JP2010506723 A JP 2010506723A JP 5073052 B2 JP5073052 B2 JP 5073052B2
- Authority
- JP
- Japan
- Prior art keywords
- error
- marker
- bit
- deletion
- data string
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
Images





























Classifications
-
- G—PHYSICS
- G11—INFORMATION STORAGE
- G11B—INFORMATION STORAGE BASED ON RELATIVE MOVEMENT BETWEEN RECORD CARRIER AND TRANSDUCER
- G11B20/00—Signal processing not specific to the method of recording or reproducing; Circuits therefor
- G11B20/10—Digital recording or reproducing
- G11B20/18—Error detection or correction; Testing, e.g. of drop-outs
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B82—NANOTECHNOLOGY
- B82Y—SPECIFIC USES OR APPLICATIONS OF NANOSTRUCTURES; MEASUREMENT OR ANALYSIS OF NANOSTRUCTURES; MANUFACTURE OR TREATMENT OF NANOSTRUCTURES
- B82Y10/00—Nanotechnology for information processing, storage or transmission, e.g. quantum computing or single electron logic
-
- G—PHYSICS
- G11—INFORMATION STORAGE
- G11B—INFORMATION STORAGE BASED ON RELATIVE MOVEMENT BETWEEN RECORD CARRIER AND TRANSDUCER
- G11B5/00—Recording by magnetisation or demagnetisation of a record carrier; Reproducing by magnetic means; Record carriers therefor
- G11B5/74—Record carriers characterised by the form, e.g. sheet shaped to wrap around a drum
- G11B5/743—Patterned record carriers, wherein the magnetic recording layer is patterned into magnetic isolated data islands, e.g. discrete tracks
-
- G—PHYSICS
- G11—INFORMATION STORAGE
- G11B—INFORMATION STORAGE BASED ON RELATIVE MOVEMENT BETWEEN RECORD CARRIER AND TRANSDUCER
- G11B20/00—Signal processing not specific to the method of recording or reproducing; Circuits therefor
- G11B20/10—Digital recording or reproducing
- G11B2020/10851—Erasing data on the record carrier
-
- G—PHYSICS
- G11—INFORMATION STORAGE
- G11B—INFORMATION STORAGE BASED ON RELATIVE MOVEMENT BETWEEN RECORD CARRIER AND TRANSDUCER
- G11B20/00—Signal processing not specific to the method of recording or reproducing; Circuits therefor
- G11B20/10—Digital recording or reproducing
- G11B20/18—Error detection or correction; Testing, e.g. of drop-outs
- G11B20/1816—Testing
- G11B2020/1823—Testing wherein a flag is set when errors are detected or qualified
-
- G—PHYSICS
- G11—INFORMATION STORAGE
- G11B—INFORMATION STORAGE BASED ON RELATIVE MOVEMENT BETWEEN RECORD CARRIER AND TRANSDUCER
- G11B20/00—Signal processing not specific to the method of recording or reproducing; Circuits therefor
- G11B20/10—Digital recording or reproducing
- G11B20/18—Error detection or correction; Testing, e.g. of drop-outs
- G11B20/1833—Error detection or correction; Testing, e.g. of drop-outs by adding special lists or symbols to the coded information
- G11B2020/1843—Error detection or correction; Testing, e.g. of drop-outs by adding special lists or symbols to the coded information using a cyclic redundancy check [CRC]
-
- G—PHYSICS
- G11—INFORMATION STORAGE
- G11B—INFORMATION STORAGE BASED ON RELATIVE MOVEMENT BETWEEN RECORD CARRIER AND TRANSDUCER
- G11B2220/00—Record carriers by type
- G11B2220/20—Disc-shaped record carriers
- G11B2220/25—Disc-shaped record carriers characterised in that the disc is based on a specific recording technology
- G11B2220/2508—Magnetic discs
- G11B2220/2516—Hard disks
Landscapes
- Engineering & Computer Science (AREA)
- Chemical & Material Sciences (AREA)
- Nanotechnology (AREA)
- Physics & Mathematics (AREA)
- Mathematical Physics (AREA)
- Theoretical Computer Science (AREA)
- Crystallography & Structural Chemistry (AREA)
- Signal Processing (AREA)
- Signal Processing For Digital Recording And Reproducing (AREA)
- Error Detection And Correction (AREA)
Description
Insertionエラーが、そのセクタデータの4ビット目で発生する様子を表す。図4に示すように、1ビットInsertionエラーが発生した後、発生箇所以降のビット列が右シフトにずれてしまい、バーストエラー状態となる。
F. Sellersにより、提案されている(非特許文献1参照)。
3 磁気ディスク
4 スピンドルモータ
5 アクチュエータ(VCM)
6 プリアンプ
7 リードチャネル回路
8 ハードディスクコントローラ
30 基板
34 記録ドット
70 マーカー符号器
78 マーカー復号器
85 ECC復号器
20、40 未挿入箇所計算部
42 2ビットマーカー挿入部
44 終端マーカー挿入部
10 I/Dエラー発生判定部
12 I/Dエラー保存部
14 I/Dエラー発生位置特定部
16 I/Dエラー訂正部
18 マーカー除去部
22 第2のI/Dエラー発生位置特定部
図6は、本発明のディスク記憶装置の一実施の形態の外観図である。図6は、ディスク記憶装置として、磁気ディスク装置(ハードディスクドライブ)を例に示す。
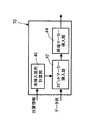
図8は、本発明の一実施の形態の記録再生系の主要部の回路ブロック図である。図8に示すように、磁気ディスク装置の記録再生系は、大きく分けて、ハードディスクコントローラ(HDC)8、リードチャネル(RDC)7、そしてプリアンプ6とからなる。
Length Limited)符号などの拘束条件が満たされる列に変換する。そして、ECC符号器83は、記録符号器82の出力データ列に、ECC(Error
Correction Code)パリティを付加する。
図15は、マーカー復号器78の第1の実施の形態のブロック図である。図16は、2ビットマーカーのエラー検出動作の説明図、図17は、終端マーカーのエラー検出動作の説明図である。
図29は、本発明のマーカー復号器の第2の実施の形態のブロック図、図30は、図29の実施の形態の未挿入箇所計算部の説明図である。図29のマーカー復号器78において、図15で説明したものと同一のものは、同一の記号で示してあり、マーカー復号器78は、I(Insertion)/D(Deletion)エラー発生判定部10、I/Dエラー発生位置特定部14、I/Dエラー訂正部16、マーカー除去部18、I/Dエラー保存部12とを有する。
上述の実施の形態では、ディスク装置として、ビットパターンド媒体を用いた磁気ディスク装置で説明したが、他のライト同期により、記録を行うディスク装置にも適用できる。又、2ビットマーカーの参照サンプル数を、8で説明したが、複数、望ましくは、4サンプル以上であれば、良い。
Claims (5)
- 予め決められたビット数間隔で、複数の2ビットのマーカーが挿入されたデータ列を受信し、誤りを訂正する誤り訂正回路であって、
前記データ列から前記2ビットのマーカーをサンプルし、複数のマーカーのサンプル値から、前記マーカー上の誤りか、インサーションエラーであるか、デリーションエラーであるかを判定するマーカー復号器と、
前記マーカー復号器からのデータ列の誤り訂正を、前記データ列の誤り訂正符号を用いて行う誤り訂正器とを有し、
前記マーカー復号器は、
前記データ列から前記2ビットのマーカーをサンプルし、3個以上のマーカーのサンプル値から、前記マーカー上の誤りか、インサーションエラーであるか、デリーションエラーであるかを判定するI/Dエラー発生判定部と、
前記I/Dエラー発生判定部からの前記インサーションエラー又は前記デリーションエラーの判定結果を受け、前記3個以上のマーカーのサンプル値から、前記インサーションエラー又は前記デリーションエラーの発生位置を特定する位置特定部と、
前記データ列の前記特定されたエラー発生位置のエラー訂正を行うI/Dエラー訂正部と、
前記エラー訂正されたデータ列から、前記2ビットのマーカーを除去するマーカー除去部とを有する
ことを特徴とする誤り訂正回路。 - 前記誤り訂正回路は、ディスク記憶装置を構成し、
前記ディスク記憶装置は、データ列に対し、予め決められたビット数間隔で、複数の2ビットのマーカーを挿入するマーカー符号器と、前記マーカー符号器からのデータ列を、回転するディスク媒体に記録し、前記ディスク媒体から前記記録された前記データ列を読み出すヘッドとを有し、
前記誤り訂正回路は、前記ヘッドから読み出された前記データ列を受信し、受信したデータ列を、誤り訂正の対象とし、
前記ディスク媒体が、記録ドットが孤立して形成されたビットパターンド媒体からなる
ことを特徴とする請求項1に記載の誤り訂正回路。 - データ列に対し、予め決められたビット数間隔で、複数の2ビットのマーカーを挿入するマーカー符号器と、
前記マーカー符号器からのデータ列を、回転するディスク媒体に記録し、前記ディスク媒体から前記記録された前記データ列を読み出すヘッドと、
前記ヘッドから読み出された前記データ列から前記2ビットのマーカーをサンプルし、複数のマーカーのサンプル値から、前記マーカー上の誤りか、インサーションエラーであるか、デリーションエラーであるかを判定するマーカー復号器と、
前記マーカー復号器からのデータ列の誤り訂正を、前記データ列の誤り訂正符号を用いて行う誤り訂正器とを有し、
前記マーカー復号器は、
前記データ列から前記2ビットのマーカーをサンプルし、3個以上のマーカーのサンプル値から、前記マーカー上の誤りか、インサーションエラーであるか、デリーションエラーであるかを判定するI/Dエラー発生判定部と、
前記I/Dエラー発生判定部からの前記インサーションエラー又は前記デリーションエラーの判定結果を受け、前記3個以上のマーカーのサンプル値から、前記インサーションエラー又は前記デリーションエラーの発生位置を特定する位置特定部と、
前記データ列の前記特定されたエラー発生位置のエラー訂正を行うI/Dエラー訂正部と、
前記エラー訂正されたデータ列から、前記2ビットのマーカーを除去するマーカー除去部とを有する
ことを特徴とするディスク記憶装置。 - データ列に対し、予め決められたビット数間隔で、複数の2ビットのマーカーを挿入するマーカー符号器と、
前記マーカー符号器からのデータ列を、回転するディスク媒体に記録し、前記ディスク媒体から前記記録された前記データ列を読み出すヘッドと、
前記ヘッドから読み出された前記データ列から前記2ビットのマーカーをサンプルし、複数のマーカーのサンプル値から、前記マーカー上の誤りか、インサーションエラーであるか、デリーションエラーであるかを判定するマーカー復号器と、
前記マーカー復号器からのデータ列の誤り訂正を、前記データ列の誤り訂正符号を用いて行う誤り訂正器とを有し、
前記マーカー復号器は、前記インサーションエラーである、又は前記デリーションエラーであると判定した場合に、前記インサーションエラー、又は前記デリーションエラーの誤り訂正を行い、且つ前記2ビットのマーカーを除去したデータ列を出力し、前記マーカー符号器は、前記ディスクに記録する前記データ列の前記インサーションエラー又はデリーションエラーの発生しないデータに対し、前記2ビットのマーカーの挿入を禁止する
ことを特徴とするディスク記憶装置。 - 前記ディスク媒体が、記録ドットが孤立して形成されたビットパターンド媒体からなる
ことを特徴とする請求項3または4に記載のディスク記憶装置。
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| PCT/JP2009/000855 WO2010097834A1 (ja) | 2009-02-26 | 2009-02-26 | 誤り訂正回路及びディスク記憶装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JPWO2010097834A1 JPWO2010097834A1 (ja) | 2012-08-30 |
| JP5073052B2 true JP5073052B2 (ja) | 2012-11-14 |
Family
ID=42665064
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2010506723A Expired - Fee Related JP5073052B2 (ja) | 2009-02-26 | 2009-02-26 | 誤り訂正回路及びディスク記憶装置 |
Country Status (3)
| Country | Link |
|---|---|
| US (1) | US8386888B2 (ja) |
| JP (1) | JP5073052B2 (ja) |
| WO (1) | WO2010097834A1 (ja) |
Families Citing this family (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US9354970B2 (en) * | 2014-03-31 | 2016-05-31 | Advanced Micro Devices, Inc. | Method and apparatus for encoding erroneous data in an error correction code protected memory |
| US9373349B1 (en) * | 2015-05-29 | 2016-06-21 | Seagate Technology Llc | Relaxing media design constraints with two-dimensional magnetic recording |
Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS63157372A (ja) * | 1986-12-19 | 1988-06-30 | Matsushita Electric Ind Co Ltd | 情報記録再生装置 |
| JPH0346167A (ja) * | 1989-07-14 | 1991-02-27 | Matsushita Electric Ind Co Ltd | 復調回路 |
| JPH07176139A (ja) * | 1993-10-28 | 1995-07-14 | Philips Electron Nv | ディジタル情報信号送受信機 |
| JP2008299975A (ja) * | 2007-05-31 | 2008-12-11 | Toshiba Corp | ディスク記憶装置及びデータ誤り訂正方法 |
| US20090003144A1 (en) * | 2007-06-29 | 2009-01-01 | Seagate Technology Llc | Method and system for error checking in a bit-patterned media |
Family Cites Families (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| EP0624990B1 (en) * | 1993-05-12 | 1999-03-31 | Matsushita Electric Industrial Co., Ltd. | Video recording and reproducing apparatus |
| EP0655850A3 (en) | 1993-10-28 | 1995-07-19 | Philips Electronics Nv | Transmission and reception of a digital information signal. |
| EP1082721B1 (en) * | 1999-03-23 | 2003-07-30 | Koninklijke Philips Electronics N.V. | Method of decoding a stream of channel bits of a signal relating to a binary channel signal into a stream of source bits of a signal relating to a binary source signal |
| US7667912B2 (en) * | 2007-07-03 | 2010-02-23 | Seagate Technology Llc | Retry and re-read for write synchronization |
-
2009
- 2009-02-26 JP JP2010506723A patent/JP5073052B2/ja not_active Expired - Fee Related
- 2009-02-26 WO PCT/JP2009/000855 patent/WO2010097834A1/ja active Application Filing
-
2010
- 2010-08-03 US US12/849,722 patent/US8386888B2/en not_active Expired - Fee Related
Patent Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS63157372A (ja) * | 1986-12-19 | 1988-06-30 | Matsushita Electric Ind Co Ltd | 情報記録再生装置 |
| JPH0346167A (ja) * | 1989-07-14 | 1991-02-27 | Matsushita Electric Ind Co Ltd | 復調回路 |
| JPH07176139A (ja) * | 1993-10-28 | 1995-07-14 | Philips Electron Nv | ディジタル情報信号送受信機 |
| JP2008299975A (ja) * | 2007-05-31 | 2008-12-11 | Toshiba Corp | ディスク記憶装置及びデータ誤り訂正方法 |
| US20090003144A1 (en) * | 2007-06-29 | 2009-01-01 | Seagate Technology Llc | Method and system for error checking in a bit-patterned media |
Also Published As
| Publication number | Publication date |
|---|---|
| WO2010097834A1 (ja) | 2010-09-02 |
| US8386888B2 (en) | 2013-02-26 |
| US20100296379A1 (en) | 2010-11-25 |
| JPWO2010097834A1 (ja) | 2012-08-30 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP3663377B2 (ja) | データ記憶装置、読み出しデータの処理装置および読み出しデータの処理方法 | |
| US7562282B1 (en) | Disk drive employing error threshold counters to generate an ECC error distribution | |
| US7800853B1 (en) | Correcting servo sectors in a disk drive | |
| JP4814925B2 (ja) | データ記録方法、記録媒体、および再生装置 | |
| US9489260B1 (en) | Flexible super block sizing for failed sector recovery | |
| US9143168B1 (en) | Method and system for removing interference caused by servo data from user data | |
| US7322003B2 (en) | Information storage device | |
| US6462898B2 (en) | Disk drive with information encoded in the position error signal fields | |
| US7941729B2 (en) | Data storage device and error processing method in its read processing | |
| US7131052B2 (en) | Algebraic decoder and method for correcting an arbitrary mixture of burst and random errors | |
| JP2007528566A (ja) | エラー訂正符号化方法及びその装置、並びにエラー訂正復号化方法及びその装置 | |
| JP5073052B2 (ja) | 誤り訂正回路及びディスク記憶装置 | |
| US20100241922A1 (en) | Error correction circuit and data storage device | |
| EP2843662A1 (en) | Systems and methods for multi-level encoding and decoding | |
| US20120198304A1 (en) | Information reproduction apparatus and information reproduction method | |
| JP2010287271A (ja) | 誤り訂正方法、及びデータ再生装置 | |
| US9257146B1 (en) | Data storage device comprising sequence detector compensating for inter-track interference | |
| US9633691B2 (en) | Storage controller, storage device, and method | |
| JP2005209286A (ja) | データ記録方法、記録媒体及び再生装置 | |
| JP4238425B2 (ja) | ディスクドライブ装置およびサーボ情報検出方法 | |
| KR100734294B1 (ko) | 결함 영역 검출/복구 방법 및 장치와 이를 이용한 디스크드라이브 | |
| CN109509488B (zh) | 存储装置以及记录介质的控制方法 | |
| JP2003257134A (ja) | 信号再生方法及び信号再生装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20120522 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20120628 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20120724 |
|
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20120821 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20150831 Year of fee payment: 3 |
|
| LAPS | Cancellation because of no payment of annual fees |