JP5054834B2 - 情報処理装置、システム、空きスペース案内方法及びプログラム - Google Patents
情報処理装置、システム、空きスペース案内方法及びプログラム Download PDFInfo
- Publication number
- JP5054834B2 JP5054834B2 JP2011057899A JP2011057899A JP5054834B2 JP 5054834 B2 JP5054834 B2 JP 5054834B2 JP 2011057899 A JP2011057899 A JP 2011057899A JP 2011057899 A JP2011057899 A JP 2011057899A JP 5054834 B2 JP5054834 B2 JP 5054834B2
- Authority
- JP
- Japan
- Prior art keywords
- empty space
- parking lot
- vehicle
- information
- car
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
- 230000010365 information processing Effects 0.000 title claims description 101
- 238000000034 method Methods 0.000 title claims description 13
- 238000003384 imaging method Methods 0.000 claims description 8
- 230000005540 biological transmission Effects 0.000 claims description 6
- 238000003672 processing method Methods 0.000 claims 2
- 238000010586 diagram Methods 0.000 description 36
- 238000004891 communication Methods 0.000 description 23
- 238000012545 processing Methods 0.000 description 14
- 238000005516 engineering process Methods 0.000 description 7
- 230000008859 change Effects 0.000 description 5
- 230000007246 mechanism Effects 0.000 description 4
- SAZUGELZHZOXHB-UHFFFAOYSA-N acecarbromal Chemical compound CCC(Br)(CC)C(=O)NC(=O)NC(C)=O SAZUGELZHZOXHB-UHFFFAOYSA-N 0.000 description 2
- 239000004973 liquid crystal related substance Substances 0.000 description 2
- 230000008569 process Effects 0.000 description 2
- 238000013459 approach Methods 0.000 description 1
- 230000003190 augmentative effect Effects 0.000 description 1
- 239000003086 colorant Substances 0.000 description 1
- 238000012986 modification Methods 0.000 description 1
- 230000004048 modification Effects 0.000 description 1
Images














Landscapes
- Navigation (AREA)
- Traffic Control Systems (AREA)
- Management, Administration, Business Operations System, And Electronic Commerce (AREA)
Description
ところが、各ブロックの入り口に「満車」「空」が表示されているとしても、運転手は、そのブロック近辺まで走行してみないと「満車」「空」の状況はつかめない。或いは、場内が一覧された電光板を取り入れている駐車場もあるが、運転手は、運転しながら電光板を眺めてその目的スペースに辿り着くことは困難である。また、駐車場内は一方通行が設定されているところも多く、運転手が「空」を見つけたとしても、空いている駐車スペースまで辿り着きにくいという問題がある。
このような課題を解決するために、例えば先行文献1では、カーナビゲーションシステムに駐車場の空き状況を反映させる仕組みが開示されている。先行文献1の方法は、駐車スペースから発車しそうな車を感知し、その状況を他の車のカーナビゲーションシステムに送信することで、近くに存在する空きスペースを案内するというものである。
以下、実施形態1を説明する。
図1は、空きスペース案内システムのシステム構成の一例を示す図である。図1に示されるように、空きスペース案内システムは、駐車場内のスペース(カースペース)毎に設置されている複数のセンサー3と、駐車場内に複数設置されている無線通信用のアンテナと、駐車場内に複数、設置されている場内カメラ5と、情報処理装置1と、駐車場内の車2と、がネットワークを介して接続されている。
情報処理装置1は、複数のセンサー3より駐車場内の各空きスペース情報を無線、又は有線を介して受信する。なお、センサー3は、スペースが空いたときに空いた旨の通知を情報処理装置1に送信してもよいし、予め定められた時間間隔毎にスペースが空いているか否かの情報を情報処理装置1に送信してもよい。
また、情報処理装置1は、複数の場内カメラ5より随時、場内カメラ5で撮影された画像を無線、又は有線を介して受信する。情報処理装置1は、場内カメラ5から受信した画像に基づき、車2の位置及び向きを取得する。より具体的に説明すると、情報処理装置1は、場内カメラ5と場内カメラ5が設置されている場所情報とを関連付けた情報を有しており、どの場内カメラ5からの画像かによって、その場内カメラ5が設置されている場所情報を特定し、前記画像に写っている車2の場所を特定する。また、情報処理装置1は、前記画像を解析することにより、車2の向きを取得する。なお、本実施形態の空きスペース案内システムでは、駐車場の入り口に、場内カメラ5が設置されており、この場内カメラ5は、駐車場に入場する車2のナンバープレートを撮影するものとする。情報処理装置1は、このナンバープレートに基づき、車2を識別し、複数の場内カメラ5から送られている車2の画像よりナンバープレートを抽出し、車2を追跡することができる。つまり、情報処理装置1は、複数の場内カメラ5から送られてくる画像に基づき、駐車場内の車2の現在の位置及び向きを常時、把握しているものとする。
車2は、前記仮想空間画像を受信すると、前記仮想空間画像を車のディスプレイに投影し、前記仮想空間画像が、前記ディスプレイからの駐車場内の風景に重畳して表示するよう制御する。
図2に示されるように、情報処理装置1は、ハードウェア構成として、制御装置11と、記憶装置12と、通信装置13と、がバス14を介して接続された構成を有する。制御装置11は、CPU等であって、記憶装置12等に記憶されているプログラムに基づき処理を実行することによって情報処理装置1の機能を実現する。記憶装置12は、RAM、ROM、HDD等の記憶装置であって、プログラムを記憶したり、制御装置11がプログラムに基づき処理を実行する際に利用するデータ等を記憶したりする。通信装置13は、情報処理装置1と複数のセンサー3との有線又は無線通信の制御及び複数のアンテナ4との無線通信の制御を司る。本実施形態を含む以下の実施形態では、通信装置13が複数のセンサー3及び複数のアンテナ4との無線通信の制御を司るものとして説明を行う。しかしながら、情報処理装置1は、情報処理装置1と複数のセンサー3との無線通信の制御を司る通信装置と、情報処理装置1と複数のアンテナ4との無線通信の制御を司る通信装置と、の2つの通信装置を有する構成を採用してもよい。
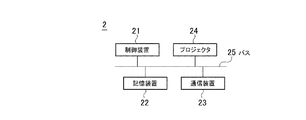
図3に示されるように、車2は、ハードウェア構成として、制御装置21と、記憶装置22と、通信装置23と、プロジェクタ24と、がバス25を介して接続された構成を有する。制御装置21は、CPU等であって、記憶装置22等に記憶されているプログラムに基づき処理を実行することによって車2の本実施形態に係る機能を実現する。記憶装置22は、RAM、ROM、HDD等の記憶装置であって、プログラムを記憶したり制御装置21がプログラムに基づき処理を実行する際に利用するデータ等を記憶したりする。通信装置23は、車2と複数のアンテナ4との無線通信の制御を司る。プロジェクタ24は、情報処理装置1より送信された(又は配信された)仮想空間画像を車2のディスプレイに投影する。このディスプレイは、Head−Up Display(HUD)と呼ばれる仕組みであり、プロジェクタ24から投射された画像が、車のフロントガラスなどで反射して運転手に見えるようにしたものである。これにより、運転手は運転席からフロントガラス越しに見える通常の風景と、プロジェクタ24で投影され、反射して見える仮想空間画像とを同時に見ることになり、重畳した画像として捉えることができる。
空きスペース情報取得部31は、駐車場の空きスペース情報を取得する。より具体的には、空きスペース情報取得部31は、複数のセンサー3より駐車場内の各空きスペース情報を無線、又は有線を介して受信する。車情報取得部32は、駐車場内の車の位置及び向きを取得する。より具体的に説明すると、車情報取得部32は、場内カメラ5で撮影された車2の画像を受信する。そして、車情報取得部32は、記憶装置12等に記憶されている場内カメラ5と場内カメラ5が設置されている場所情報とが関連付けた情報より、どの場内カメラ5からの画像かによって、その場内カメラ5が設置されている場所情報を特定し、前記画像に写っている車2の場所を特定する。また、車情報取得部32は、前記画像を解析することにより、車2の向きを取得する。
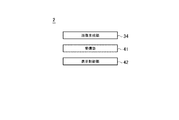
空きスペース特定部33は、空きスペース情報取得部31で取得された空きスペース情報と、車情報取得部32で取得された車2の位置及び向きと、記憶装置12等に記憶されている駐車場内の地図情報である駐車場マップと、に基づいて、車2の進行方向に存在する空きスペースを特定する。より具体的には、例えば、空きスペース情報取得部31より取得した空きスペース情報より得られるスペースID或いは空きスペースの位置情報と駐車場マップとを照合し、空きスペースの位置情報を特定する。そして、空きスペース特定部33は、車情報取得部32で取得された車2の位置及び向きと駐車場マップの経路情報より、前記特定した一以上の空きスペースの位置情報のうち、車2の進行方向に存在する空きスペースを特定する。画像生成部34は、空きスペース特定部33で特定された車2の進行方向に存在する空きスペースの駐車場内の位置に応じて、前記空きスペースを示す空きスペースオブジェクトを含み、前記空きスペースの位置を示す前記駐車場内の仮想空間画像を生成する。ここで、画像生成部34は、車情報取得部32で取得された車2の位置及び向きに基づき、車2からの運転者の視野を特定し、前記視野内における車2の進行方向に存在する空きスペースの駐車場内の位置に応じて、前記空きスペースを示す空きスペースオブジェクトを含み、前記空きスペースの位置を示す前記駐車場内の仮想空間画像を生成するようにしてもよい。
送信部35は、画像生成部34で生成された仮想空間画像を、車2の位置近くのアンテナ4を介して車2に送信する。
受信部41は、アンテナ4を介して情報処理装置より仮想空間画像を受信する。表示制御部42は、プロジェクタ24を制御し、受信部41で受信された仮想空間画像を車のディスプレイに投影させることで、前記仮想空間画像を前記ディスプレイからの駐車場内の風景に重畳して表示させるよう制御する。
シーケンスSQ1において、駐車場内のスペース(カースペース)毎に設置されているセンサー3は、例えば、予め定められた時間間隔毎にスペースが空いているか否かの情報を情報処理装置1に送信する。情報処理装置1は、前記情報を受信し、駐車場内の空きスペース情報を把握、管理する。
シーケンスSQ2において、場内カメラ5は、常時、撮影した画像を無線、又は有線を介して情報処理装置1に送信する。なお、シーケンスSQ1と、シーケンスSQ2と、の順序は問わない、図6に示す順序と逆であってもよいし、同時であってもよい。情報処理装置1は、前記画像を受信し、駐車場内の車の位置及び向きを把握、管理する。
シーケンスSQ3において、情報処理装置1は、把握、管理している、空きスペース情報と、車の位置及び向きと、記憶装置12等に記憶されている駐車場マップと、に基づいて、車2の進行方向に存在する空きスペースを特定する。
シーケンスSQ4において、情報処理装置1は、把握、管理している車の進行方向に存在する空きスペースの駐車場内の位置に応じて、前記空きスペースを示す空きスペースオブジェクトを含み、前記空きスペースの位置を示す前記駐車場内の仮想空間画像を生成する。
シーケンスSQ5及びシーケンスSQ6において、情報処理装置1は、車の位置に近いアンテナ4を介して前記仮想空間画像を車2に送信する。
シーケンスSQ7において、車2は、情報処理装置1より受信した仮想空間画像を車のディスプレイに投影させることで、前記仮想空間画像を前記ディスプレイからの駐車場内の風景に重畳して表示させるよう制御する。
図6に示される処理は、車が駐車場内に入場し、駐車スペースに駐車されるまで、常時、又は所定の間隔(例えば、0.1秒間隔)毎に実行される。
ここで、空きスペースが多い場合、図7に示した様な空きスペースを示す「空」のオブジェクトがディスプレイに多数表示されることになり、車2の運転手にとって視界が悪くなるような場合も考えられる。そこで、例えば、情報処理装置1は、空きスペースから車2の距離が所定の距離以上、離れていた場合は、駐車場内を複数のブロック毎に区切ったブロック毎のブロック内のスペースに対する空きスペースの割合を例えば色等で表す空きスペース割合オブジェクトを含み、前記ブロック毎の位置を示す仮想空間画像を生成する。一方、情報処理装置1は、前記所定の距離未満の場合は、車2の進行方向に存在する空きスペースを表す空きスペースオブジェクトを含み、前記空きスペースの位置を示す仮想空間画像を生成するようにしてもよい。このような構成とすることにより、車2が空きスペースから離れた位置にある場合には、ディスプレイには、ブロック毎の空きスペース割合を示す色分けされたオブジェクトが表示される。そして、車2が空きスペースに近づいた場合は、図7に示すような1台毎の空きスペースを示す空きスペースオブジェクトが展開され、表示されるようになる。
以下、実施形態2を説明する。実施形態2では、実施形態1とは異なる点を説明する。
図8は、実施形態2の情報処理装置1のソフトウェア構成の一例を示す図である。図8に示されるように、実施形態2の情報処理装置1のソフトウェア構成は、実施形態1の情報処理装置1のソフトウェア構成に比べて、進路特定部51が更に含まれている。進路特定部51は、空きスペース特定部33で特定された空きスペースと、車情報取得部32で取得された駐車場内の車の位置及び向きと、記憶装置12に記憶されている駐車場マップと、に基づいて、前記車から前記空きスペースまでの進路を特定する。本実施形態の画像生成部34は、空きスペース特定部33で特定された車2の進行方向に存在する空きスペースの駐車場内の位置に応じて、前記空きスペースを示す空きスペースオブジェクトを含み、前記空きスペースの位置を示すと共に、進路特定部51で特定された進路を示す案内オブジェクトを含む前記仮想空間画像を生成する。
また、例えば、進路特定部51は、空きスペース特定部33で車の進行方向に存在する空きスペースが複数、特定された場合、前記車から前記複数の空きスペースのうち、最も前記車に近い前記空きスペースまでの進路を特定する。
図9に示す実施形態2のシーケンス図は、図6に示した実施形態1のシーケンス図に比べて、シーケンスSQ11が、新たに追加されている。
シーケンスSQ11において、情報処理装置1は、把握、管理している、空きスペース情報と、車の位置及び向きと、記憶装置12等に記憶されている駐車場マップと、に基づいて、車からシーケンスSQ3において特定した空きスペースまでの進路を特定する。
シーケンスSQ4において、情報処理装置1は、把握、管理している車の進行方向に存在する空きスペースの駐車場内の位置に応じて、前記空きスペースを示す空きスペースオブジェクトを含み、前記空きスペースの位置を示すと共に、特定した進路を示す案内オブジェクトを含む前記仮想空間画像を生成する。
上述したように、本実施形態によれば、各車に搭載されているカーナビゲーションシステムの地図情報を更新することなく、又は、各車にカーナビゲーションシステムが搭載されていなくても、運転手が、より素早く目的とする空きスペースを見つけ、辿り着くことが可能な技術を提供することができる。
以下、実施形態3を説明する。実施形態3では、上述した実施形態とは異なる点を説明する。
図11は、実施形態3の情報処理装置1のソフトウェア構成の一例を示す図である。図11に示されるように、実施形態3の情報処理装置1のソフトウェア構成は、実施形態2の情報処理装置1のソフトウェア構成に比べて、設備特定部61が更に含まれている。また、駐車場マップには、上述の情報に加え、駐車場の設備(例えば、店舗の入り口やトイレ、非常出口等)や当該設備の場所に関する位置情報等を管理している。設備特定部61は、車情報取得部32で取得された駐車場内の車の位置及び向きと、記憶装置12に記憶されている駐車場マップと、に基づいて、車の進行方向に存在する駐車場の設備(例えば、店舗の入り口やトイレ、非常出口等)を特定する。本実施形態の画像生成部34は、空きスペース特定部33で特定された車2の進行方向に存在する空きスペース及び設備の駐車場内の位置に応じて、前記空きスペースを示す空きスペースオブジェクトと、進路特定部51で特定された進路を示す案内オブジェクトと、設備特定部61で特定された車2の進行方向に存在する設備を示す設備オブジェクトと、を含み、前記空きスペースの位置及び前記設備の位置を示す仮想空間画像を生成する。
図12に示す実施形態3のシーケンス図は、図9に示した実施形態2のシーケンス図に比べて、シーケンスSQ21が、新たに追加されている。
シーケンスSQ21において、情報処理装置1は、把握、管理している車の位置及び向きと、記憶装置12等に記憶されている駐車場マップと、に基づいて、車の進行方向に存在する駐車場の設備を特定する。なお、シーケンスSQ11と、シーケンスSQ21と、の順序は問わない、図12に示す順序と逆であってもよいし、同時であってもよい。
シーケンスSQ4において、情報処理装置1は、把握、管理している車の進行方向に存在する空きスペースの駐車場内及び設備の位置に応じて、空きスペースオブジェクトと、案内オブジェクトと、設備オブジェクトと、を含み、前記空きスペースの位置及び前記設備の位置を示す仮想空間画像を生成する。
上述したように、本実施形態によれば、各車に搭載されているカーナビゲーションシステムの地図情報を更新することなく、又は、各車にカーナビゲーションシステムが搭載されていなくても、運転手が、より適切に目的とする空きスペースを見つけ、辿り着くことが可能な技術を提供することができる。例えば、運転手は、店舗の入り口近くの駐車スペースに駐車することもできる。
以下、実施形態4について説明する。実施形態4では、上述した実施形態とは異なる点を説明する。
図14は、実施形態4の情報処理装置1のソフトウェア構成の一例を示す図である。また、図15は、実施形態4の車2のソフトウェア構成の一例を示す図である。実施形態4の情報処理装置1のソフトウェア構成は、実施形態1の情報処理装置1のソフトウェア構成に比べて、画像生成部34が含まれていない。その代わり、実施形態4の車2のソフトウェア構成は、実施形態1の車2のソフトウェア構成に比べて画像生成部34が新たに含まれている。本実施形態の構成では、情報処理装置1は、空きスペースオブジェクト等を車2に送信する。車2は、受信した空きスペースオブジェクト等を含む画像を生成し、ディスプレイ等に投影するよう制御する。
本実施形態の送信部35は、空きスペース特定部33で特定された空きスペースを示す空きスペースオブジェクトと、前記空きスペースの位置を表す位置情報と、を車2に送信する。そして、本実施形態の受信部41は、情報処理装置1から前記空きスペースオブジェクトと、前記位置情報と、を受信する。そして、本実施形態の画像生成部34は、受信部41で受信された前記空きスペースオブジェクトを受信部41で受信された前記位置情報で示される位置に表示させた前記駐車場内の仮想空間画像を生成する。そして、本実施形態の表示制御部42は、画像生成部34で生成された仮想空間画像を車のディスプレイに投影させることで、前記ディスプレイからの駐車場内の風景に重畳して表示させるよう制御する。
図16に示す実施形態4のシーケンスSQ1からシーケンスSQ3までの処理は、図6のシーケンスSQ1からシーケンスSQ3までの処理と同様であるため、説明を省略する。
シーケンスSQ31及びシーケンスSQ32において、情報処理装置1は、車の位置に近いアンテナ4を介して、把握、管理している車の進行方向に存在する空きスペースの駐車場内の位置に応じて、前記空きスペースを示す空きスペースオブジェクトと、前記空きスペースの位置情報と、を車2に送信する。
シーケンスSQ33において、車2は、情報処理装置1より受信した前記空きスペースオブジェクトを前記位置情報で示される位置に表示させた前記駐車場内の仮想空間画像を生成する。
シーケンスSQ34において、車2は、生成された仮想空間画像を車のディスプレイに投影させることで、前記ディスプレイからの駐車場内の風景に重畳して表示させるよう制御する。
以下、その他の実施形態について説明する。
情報処理装置1は、駐車場内に複数の車が存在する場合、ある車への誘導内容(例えば、空きスペースまでの進路に関する情報等)を基に、所定時間後(例えば、1分後)の駐車状況を予測し、他の車の空きスペースへの誘導先を変更するようにしてもよい。
また、情報処理装置1は、場内カメラ5からの画像等に基づき、誘導に従わない車両が存在する場合、次善の誘導先に誘導を切り替えるようにしてもよい。なお、このとき、情報処理装置1は、駐車状況の予測も変更するようにしてもよい。
また、情報処理装置1は、場内カメラ5に死角等が存在する場合、駐車場の入り口情報、出口情報、及び/又は誘導履歴等に基づいて、駐車状況を予測し、死角を補うようにしてもよい。
また、情報処理装置1は、入り口で撮影された車の画像(例えば、ナンバープレート等)に基づいて、車両のサイズ(高さや、軽自動車、大型自動車)等を判別し、駐車場マップで管理されている空きスペースの規格に関する情報と照合し、車両のサイズに応じた空きスペース情報を特定するようにしてもよい。
また、車2は、自身の速度情報を、情報処理装置1に送信するようにしてもよい。このような構成の場合、情報処理装置1は、車2の速度情報に応じて、車2の進行方向に存在する空きスペースを特定する。なお、情報処理装置1は、場内カメラ5からの車2の画像に基づき、車2の速度情報を求めるようにしてもよい。
また、車2がカメラ等の撮像装置を有している場合、車2は、撮像装置で撮像した駐車場内の画像と、情報処理装置1より受信した仮想空間画像と、を重畳して、ディスプレイ等に表示するようにしてもよいし、前記画像と、前記仮想空間画像と、をカーナビゲーションシステムの表示装置(つまり、非透過型のディスプレイ等)に表示するようにしてもよい。
また、例えば、上述した実施形態では、HUD方式のプロジェクタ24を例に説明を行ったが、透過型のディスプレイであってもよい。例えば、Head Mounted Displayのような人体装着型のものであってもよいし、透過型液晶フィルムを貼り付けたフロントガラス等の人体非装着型のものであってもよい。例えば、車2は、仮想空間画像を透過型液晶フィルムに表示させることで、前記仮想空間画像と、車のフロントガラスからの駐車場内の風景と、が重畳した画像として捉えることができる。
なお、仮想空間画像と、駐車場内の風景と、の位置合わせは、情報処理装置1で行ってもよいし、車2で行ってもよい。
なお、上述した実施形態を任意に組み合わせて実施してもよい。
なお、上述した情報処理装置1は、コンピュータの一例である。
2 車
3 センサー
4 アンテナ
5 場内カメラ
Claims (10)
- 駐車場の空きスペース情報を取得する空きスペース情報取得手段と、
前記駐車場に設置された撮像装置で撮影された画像に基づいて、駐車場内の車の位置及び向きを取得する車情報取得手段と、
前記空きスペース情報取得手段で取得された空きスペース情報と、前記車情報取得手段で取得された駐車場内の車の位置及び向きと、記憶装置に記憶されている駐車場マップの各空きスペースの位置情報に関する情報と、に基づいて、前記車の進行方向に存在する空きスペースを特定する空きスペース特定手段と、
前記空きスペース特定手段で特定された空きスペースと、前記車情報取得手段で取得された駐車場内の車の位置及び向きと、前記駐車場マップと、に基づいて、前記車から前記空きスペースまでの進路を特定する進路特定手段と、
前記空きスペース特定手段で特定された空きスペースを示す空きスペースオブジェクトと、前記進路特定手段で特定された進路を示す案内オブジェクトと、を含む前記空きスペースの位置を示す前記駐車場内の仮想空間画像を生成する画像生成手段と、
前記画像生成手段で生成された仮想空間画像を前記車に送信する送信手段と、
を有する情報処理装置。 - 前記空きスペース特定手段は、前記空きスペース情報取得部で取得された空きスペース情報と、前記車情報取得部で取得された駐車場内の車の位置及び向きと、前記駐車場マップの各空きスペースの位置情報及び経路情報に基づいて、前記車の進行方向に存在する空きスペースを特定する請求項1記載の情報処理装置。
- 前記進路特定手段は、前記空きスペース特定手段で車の進行方向に存在する空きスペースが複数、特定された場合、前記車から前記複数の空きスペースのうち、最も前記車に近い前記空きスペースまでの進路を特定する請求項1又は2記載の情報処理装置。
- 前記車情報取得手段で取得された駐車場内の車の位置及び向きと、記憶装置に記憶されている駐車場マップと、に基づいて、車の進行方向に存在する駐車場の設備を特定する設備特定手段を更に有し、
前記画像生成手段は、更に、前記設備特定手段で特定された前記車の進行方向に存在する設備を示す設備オブジェクトを含み、前記空きスペースの位置及び前記設備の位置を示す前記仮想空間画像を生成する請求項1乃至3何れか1項記載の情報処理装置。 - 前記画像生成手段は、前記空きスペース特定手段で前記車の進行方向に存在する空きスペースが複数、特定された場合、前記車から前記空きスペースまでの距離に応じて、形状、又は色が異なる前記空きスペースオブジェクトを含む前記仮想空間画像を生成する請求項1乃至4何れか1項記載の情報処理装置。
- 前記画像生成手段は、前記特定手段で特定された車の進行方向に存在する空きスペースと前記車との距離が所定の距離以上の場合は、前記駐車場内を所定のブロック毎に区切ったブロック毎の空きスペースの割合を表す空きスペース割合オブジェクトを含み、前記ブロック毎の位置を示す仮想空間画像を生成し、前記距離が前記所定の距離未満の場合は、前記特定手段で特定された車の進行方向に存在する空きスペースを表す空きスペースオブジェクトを含み、前記空きスペースの位置を示す仮想空間画像を生成する請求項1乃至5何れか1項記載の情報処理装置。
- 情報処理装置と、車と、を含むシステムであって、
前記情報処理装置は、
駐車場の空きスペース情報を取得する空きスペース情報取得手段と、
前記駐車場に設置された撮像装置で撮影された画像に基づいて、駐車場内の車の位置及び向きを取得する車情報取得手段と、
前記空きスペース情報取得手段で取得された空きスペース情報と、前記車情報取得手段で取得された駐車場内の車の位置及び向きと、記憶装置に記憶されている駐車場マップの各空きスペースの位置情報に関する情報と、に基づいて、前記車の進行方向に存在する空きスペースを特定する空きスペース特定手段と、
前記空きスペース特定手段で特定された空きスペースと、前記車情報取得手段で取得された駐車場内の車の位置及び向きと、前記駐車場マップと、に基づいて、前記車から前記空きスペースまでの進路を特定する進路特定手段と、
前記空きスペース特定手段で特定された空きスペースを示す空きスペースオブジェクトと、前記進路特定手段で特定された進路を示す案内オブジェクトと、を含む前記空きスペースの位置を示す前記駐車場内の仮想空間画像を生成する画像生成手段と、
前記画像生成手段で生成された仮想空間画像を前記車に送信する送信手段と、
を有し、
前記車は、
前記情報処理装置から仮想空間画像を受信する受信手段と、
前記受信手段で受信された仮想空間画像を車のディスプレイに投影させることで、前記ディスプレイからの駐車場内の風景に重畳して表示させるよう制御する表示制御手段と、
を有するシステム。 - 情報処理装置が実行する情報処理方法であって、
駐車場の空きスペース情報を取得する空きスペース情報取得ステップと、
前記駐車場に設置された撮像装置で撮影された画像に基づいて、駐車場内の車の位置及び向きを取得する車情報取得ステップと、
前記空きスペース情報取得ステップで取得された空きスペース情報と、前記車情報取得ステップで取得された駐車場内の車の位置及び向きと、記憶装置に記憶されている駐車場マップの各空きスペースの位置情報に関する情報と、に基づいて、前記車の進行方向に存在する空きスペースを特定する空きスペース特定ステップと、
前記空きスペース特定ステップで特定された空きスペースと、前記車情報取得ステップで取得された駐車場内の車の位置及び向きと、前記駐車場マップと、に基づいて、前記車から前記空きスペースまでの進路を特定する進路特定ステップと、
前記空きスペース特定ステップで特定された空きスペースを示す空きスペースオブジェクトと、前記進路特定ステップで特定された進路を示す案内オブジェクトと、を含む前記空きスペースの位置を示す前記駐車場内の仮想空間画像を生成する画像生成ステップと、
前記画像生成ステップで生成された仮想空間画像を前記車に送信する送信ステップと、
を含む情報処理方法。 - 情報処理装置と、車と、を含むシステムにおける空きスペース案内方法であって、
前記情報処理装置が、駐車場の空きスペース情報を取得する空きスペース情報取得ステップと、
前記情報処理装置が、前記駐車場に設置された撮像装置で撮影された画像に基づいて、駐車場内の車の位置及び向きを取得する車情報取得ステップと、
前記情報処理装置が、前記空きスペース情報取得ステップで取得された空きスペース情報と、前記車情報取得ステップで取得された駐車場内の車の位置及び向きと、記憶装置に記憶されている駐車場マップの各空きスペースの位置情報に関する情報と、に基づいて、前記車の進行方向に存在する空きスペースを特定する空きスペース特定ステップと、
前記情報処理装置が、前記空きスペース特定ステップで特定された空きスペースと、前記車情報取得ステップで取得された駐車場内の車の位置及び向きと、前記駐車場マップと、に基づいて、前記車から前記空きスペースまでの進路を特定する進路特定ステップと、
前記情報処理装置が、前記空きスペース特定ステップで特定された空きスペースを示す空きスペースオブジェクトと、前記進路特定ステップで特定された進路を示す案内オブジェクトと、を含む前記空きスペースの位置を示す前記駐車場内の仮想空間画像を生成する画像生成ステップと、
前記情報処理装置が、前記画像生成ステップで生成された仮想空間画像を前記車に送信する送信ステップと、
前記車が、前記情報処理装置から仮想空間画像を受信する受信ステップと、
前記車が、前記受信ステップで受信された仮想空間画像を車のディスプレイに投影させることで、前記ディスプレイからの駐車場内の風景に重畳して表示させるよう制御する表示制御ステップと、
を含む空きスペース案内方法。 - コンピュータに、
駐車場の空きスペース情報を取得する空きスペース情報取得ステップと、
前記駐車場に設置された撮像装置で撮影された画像に基づいて、駐車場内の車の位置及び向きを取得する車情報取得ステップと、
前記空きスペース情報取得ステップで取得された空きスペース情報と、前記車情報取得ステップで取得された駐車場内の車の位置及び向きと、記憶装置に記憶されている駐車場マップの各空きスペースの位置情報に関する情報と、に基づいて、前記車の進行方向に存在する空きスペースを特定する空きスペース特定ステップと、
前記空きスペース特定ステップで特定された空きスペースと、前記車情報取得ステップで取得された駐車場内の車の位置及び向きと、前記駐車場マップと、に基づいて、前記車から前記空きスペースまでの進路を特定する進路特定ステップと、
前記空きスペース特定ステップで特定された空きスペースを示す空きスペースオブジェクトと、前記進路特定ステップで特定された進路を示す案内オブジェクトと、を含む前記空きスペースの位置を示す前記駐車場内の仮想空間画像を生成する画像生成ステップと、
前記画像生成ステップで生成された仮想空間画像を前記車に送信する送信ステップと、
を実行させるプログラム。
Priority Applications (19)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2011057899A JP5054834B2 (ja) | 2010-03-30 | 2011-03-16 | 情報処理装置、システム、空きスペース案内方法及びプログラム |
| US13/635,370 US8896685B2 (en) | 2010-03-14 | 2011-03-30 | Method and system for determining information relating to vacant spaces of a parking lot |
| SG2012071809A SG184301A1 (en) | 2010-03-30 | 2011-03-30 | Information processing apparatus, information processing method and program, information processing apparatus, vacant space guidance system, vacant space guidance method and program, image display system, image display method and program |
| SG10201400952WA SG10201400952WA (en) | 2010-03-30 | 2011-03-30 | Information Processing System, Information Processing Method And Program, Information Processing Apparatus, Vacant Space Guidance System, Vacant Space Guidance Method And Program, Image Display System, Image Display Method And Program |
| MYPI2014000891A MY173040A (en) | 2010-03-30 | 2011-03-30 | Information processing apparatus, system, vacant space guidance method and program |
| SG10201400949SA SG10201400949SA (en) | 2010-03-30 | 2011-03-30 | Information Processing System, Information Processing Method And Program, Information Processing Apparatus, Vacant Space Guidance System, Vacant Space Guidance Method And Program, Image Display System, And Image Display Method And Program |
| SG10201400956YA SG10201400956YA (en) | 2010-03-30 | 2011-03-30 | Information processing system, information processing method and program, information processing apparatus, vacant space guidance system, vacant space guidance method and program, image display system, image display method and program |
| PCT/JP2011/057972 WO2011122654A1 (ja) | 2010-03-30 | 2011-03-30 | 情報処理装置、情報処理方法及びプログラム、情報処理装置、空きスペース案内システム、空きスペース案内方法及びプログラム、画像表示システム、画像表示方法及びプログラム |
| MYPI2014000893A MY174604A (en) | 2010-03-30 | 2011-03-30 | Information processing apparatus, system, vacant space guidance method and program |
| EP20140161561 EP2752805A1 (en) | 2010-03-30 | 2011-03-30 | Information processing apparatus, information processing method and program |
| EP14161554.2A EP2752362B1 (en) | 2010-03-30 | 2011-03-30 | Image display system, image display method and program |
| MYPI2014000892A MY174603A (en) | 2010-03-30 | 2011-03-30 | Information processing apparatus, system, vacant space guidance method and program |
| EP20110762878 EP2544138A4 (en) | 2010-03-30 | 2011-03-30 | INFORMATION PROCESSING DEVICE, INFORMATION PROCESSING METHOD AND PROGRAM, INFORMATION PROCESSING DEVICE, GUIDING SYSTEM TO VACANT SPACE, GUIDING METHOD AND PROGRAM TO VACANCY SPACE, IMAGE DISPLAY SYSTEM, AND METHOD AND IMAGE DISPLAY PROGRAM |
| EP20140161557 EP2757517A1 (en) | 2010-03-30 | 2011-03-30 | Information processing apparatus, information processing method and program |
| MYPI2012004283A MY156130A (en) | 2010-03-30 | 2011-03-30 | Information processing apparatus, system, vacant space guidance method and program |
| US14/228,168 US9395195B2 (en) | 2010-03-30 | 2014-03-27 | System, method and program for managing and displaying product information |
| US14/228,176 US20140214606A1 (en) | 2010-03-30 | 2014-03-27 | Information processing apparatus, information processing method and program, information processing apparatus, vacant space guidance system, vacant space guidance method and program, image display system, image display method and program |
| US14/228,159 US9689688B2 (en) | 2010-03-30 | 2014-03-27 | Image display system, image display method and program |
| US14/521,259 US20150112586A1 (en) | 2010-03-30 | 2014-10-22 | Method and system for determining information relating to vacant spaces of a parking lot |
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2010079446 | 2010-03-30 | ||
| JP2010079446 | 2010-03-30 | ||
| JP2011057899A JP5054834B2 (ja) | 2010-03-30 | 2011-03-16 | 情報処理装置、システム、空きスペース案内方法及びプログラム |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2011227874A JP2011227874A (ja) | 2011-11-10 |
| JP2011227874A5 JP2011227874A5 (ja) | 2012-03-15 |
| JP5054834B2 true JP5054834B2 (ja) | 2012-10-24 |
Family
ID=45043104
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2011057899A Active JP5054834B2 (ja) | 2010-03-14 | 2011-03-16 | 情報処理装置、システム、空きスペース案内方法及びプログラム |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP5054834B2 (ja) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2020241989A1 (ko) * | 2019-05-28 | 2020-12-03 | 엘지전자 주식회사 | 무선 통신 시스템에서 단말이 신호를 수신하는 방법 및 이를 위한 단말 |
Families Citing this family (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR101379630B1 (ko) * | 2011-11-16 | 2014-04-14 | 주식회사 만도 | 주차 지원장치 및 그 지원방법, 및 차량의 주차 보조장치 및 그 보조방법 |
| KR101603765B1 (ko) * | 2014-01-29 | 2016-03-25 | 주식회사 엠에스피 | 주차안내시스템 |
| DE102014211557A1 (de) * | 2014-06-17 | 2015-12-31 | Robert Bosch Gmbh | Valet Parking Verfahren und System |
| JP2018063172A (ja) * | 2016-10-13 | 2018-04-19 | アイシン・エィ・ダブリュ株式会社 | 駐車経路案内システム、及び駐車経路案内プログラム |
| KR101979694B1 (ko) | 2016-11-04 | 2019-05-17 | 엘지전자 주식회사 | 차량에 구비된 차량 제어 장치 및 그의 제어방법 |
| JP6760114B2 (ja) * | 2017-01-31 | 2020-09-23 | 富士通株式会社 | 情報処理装置、データ管理装置、データ管理システム、方法、及びプログラム |
| JP7344095B2 (ja) * | 2019-11-19 | 2023-09-13 | 株式会社アイシン | 管制装置 |
| JP7442381B2 (ja) | 2020-04-21 | 2024-03-04 | Ihi運搬機械株式会社 | 入庫支援方法及び入庫支援装置 |
Family Cites Families (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP3355757B2 (ja) * | 1994-02-14 | 2002-12-09 | 株式会社島津製作所 | 駐車位置案内装置 |
| JPH10176928A (ja) * | 1996-12-18 | 1998-06-30 | Hitachi Ltd | 視点位置測定方法、視点位置測定装置、ヘッドアップディスプレイ装置およびミラー調整装置 |
-
2011
- 2011-03-16 JP JP2011057899A patent/JP5054834B2/ja active Active
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2020241989A1 (ko) * | 2019-05-28 | 2020-12-03 | 엘지전자 주식회사 | 무선 통신 시스템에서 단말이 신호를 수신하는 방법 및 이를 위한 단말 |
| US12106667B2 (en) | 2019-05-28 | 2024-10-01 | Lg Electronics Inc. | Method by which terminal receives signal in wireless communication system, and terminal therefor |
Also Published As
| Publication number | Publication date |
|---|---|
| JP2011227874A (ja) | 2011-11-10 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5054834B2 (ja) | 情報処理装置、システム、空きスペース案内方法及びプログラム | |
| US9904375B1 (en) | LIDAR display systems and methods | |
| US11900815B2 (en) | Augmented reality wayfinding in rideshare applications | |
| JP5052003B2 (ja) | 情報配信システム | |
| US20150112586A1 (en) | Method and system for determining information relating to vacant spaces of a parking lot | |
| JP4207941B2 (ja) | 画像表示装置及び画像生成装置 | |
| KR101066385B1 (ko) | 차량별 상세유도안내가 가능한 주차유도시스템 | |
| KR101102408B1 (ko) | 증강현실을 이용한 주차 안내 시스템 및 그를 이용한 주차 안내 방법 | |
| CN109891470A (zh) | 远程操作系统、交通系统及远程操作方法 | |
| JP6991659B2 (ja) | 車載システム及び表示制御方法 | |
| US8886454B2 (en) | Road guidance display method and system using geotagging image | |
| EP2829844A1 (en) | Navigation system | |
| CN104054033A (zh) | 用于监视车辆环境的方法 | |
| EP2963632A1 (en) | Manoeuvre assistance | |
| KR20210082448A (ko) | 정보 처리 장치, 정보 처리 방법 및 정보 처리 프로그램 | |
| KR20200043252A (ko) | 차량의 부감 영상 생성 시스템 및 그 방법 | |
| JP2008097279A (ja) | 車両外部情報表示装置 | |
| JP2008046766A (ja) | 車両外部情報表示装置 | |
| WO2017095116A1 (ko) | 내비게이션 장치 및 그 경로 안내 방법 | |
| CN113071514A (zh) | 管理系统及方法、自动驾驶系统及车辆、计算机可读介质 | |
| JP2015504815A (ja) | 運転者通知方法および運転者通知装置 | |
| JP2014211431A (ja) | ナビゲーション装置、及び、表示制御方法 | |
| JP4800252B2 (ja) | 車載装置及び交通情報提示方法 | |
| JP2020135103A (ja) | 表示制御装置、表示制御方法、および表示制御プログラム | |
| JP7348724B2 (ja) | 車載装置および表示方法 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20120201 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20120201 |
|
| A871 | Explanation of circumstances concerning accelerated examination |
Free format text: JAPANESE INTERMEDIATE CODE: A871 Effective date: 20120201 |
|
| A975 | Report on accelerated examination |
Free format text: JAPANESE INTERMEDIATE CODE: A971005 Effective date: 20120220 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20120417 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20120611 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20120717 |
|
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20120727 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 5054834 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20150803 Year of fee payment: 3 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |