JP4928325B2 - 画像処理方法、画像処理装置、プログラムおよび記憶媒体 - Google Patents
画像処理方法、画像処理装置、プログラムおよび記憶媒体 Download PDFInfo
- Publication number
- JP4928325B2 JP4928325B2 JP2007085894A JP2007085894A JP4928325B2 JP 4928325 B2 JP4928325 B2 JP 4928325B2 JP 2007085894 A JP2007085894 A JP 2007085894A JP 2007085894 A JP2007085894 A JP 2007085894A JP 4928325 B2 JP4928325 B2 JP 4928325B2
- Authority
- JP
- Japan
- Prior art keywords
- line
- vector
- point
- contour
- points
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
- 238000012545 processing Methods 0.000 title claims description 76
- 238000003672 processing method Methods 0.000 title claims 5
- 239000013598 vector Substances 0.000 claims description 424
- 238000000034 method Methods 0.000 claims description 89
- 238000000605 extraction Methods 0.000 claims description 86
- 230000008569 process Effects 0.000 claims description 69
- 238000009499 grossing Methods 0.000 claims description 19
- 239000011159 matrix material Substances 0.000 claims description 12
- 239000000284 extract Substances 0.000 claims description 5
- 230000006870 function Effects 0.000 description 22
- 238000010586 diagram Methods 0.000 description 10
- 230000015654 memory Effects 0.000 description 6
- 238000003780 insertion Methods 0.000 description 5
- 230000037431 insertion Effects 0.000 description 5
- 230000001174 ascending effect Effects 0.000 description 4
- 238000004891 communication Methods 0.000 description 3
- 238000004590 computer program Methods 0.000 description 3
- 238000004519 manufacturing process Methods 0.000 description 3
- 239000003550 marker Substances 0.000 description 3
- 238000005516 engineering process Methods 0.000 description 2
- 230000008859 change Effects 0.000 description 1
- 239000011248 coating agent Substances 0.000 description 1
- 238000000576 coating method Methods 0.000 description 1
- 238000007796 conventional method Methods 0.000 description 1
- 230000000694 effects Effects 0.000 description 1
- 230000010365 information processing Effects 0.000 description 1
- 238000007689 inspection Methods 0.000 description 1
- 230000010354 integration Effects 0.000 description 1
- 238000012986 modification Methods 0.000 description 1
- 230000004048 modification Effects 0.000 description 1
- 230000003287 optical effect Effects 0.000 description 1
- 238000007639 printing Methods 0.000 description 1
- 230000009467 reduction Effects 0.000 description 1
- 230000001172 regenerating effect Effects 0.000 description 1
- 238000009877 rendering Methods 0.000 description 1
- 238000000926 separation method Methods 0.000 description 1
- 230000000153 supplemental effect Effects 0.000 description 1
- 230000003936 working memory Effects 0.000 description 1
Images




































Landscapes
- Image Processing (AREA)
- Image Analysis (AREA)
Description
細線化された線図形の端点と交点とに基づいて、前記細線化された線図形の端点と端点の間、または端点と交点の間、または交点と交点の間をつなぐ線素または閉曲線ごとに前記細線化された線図形を分割し、当該分割された線素および閉曲線それぞれの輪郭情報を抽出する抽出手段と、
前記抽出手段で抽出された輪郭情報の位置を半画素単位に調整することにより、線芯化されたベクトルデータを生成する線芯化手段と、
を備えることを特徴とする。
図1は本発明の実施形態に係る画像処理装置の機能ブロック図を示す図である。同図において、細線化済2値画像獲得部200は、2値画像入力部210で得た2値画像を、2値画像細線化部220で細線化する。2値画像入力部210は、スキャナ等の画像入力部211と、スキャン画像の2値化処理を行う2値化部212とで構成される。2値画像細線化部220では、縦横の4方向のいずれかで連結した連結画素(4−連結)に基づいて、2値画像の細線化処理を行うことによって、細線化された2値画像を出力する。即ち、スキャナ等の画像入力部211で光電走査により読み取られた画像データを公知の2値化部212で閾値処理により2値化する。そして、2値画像細線化部220では、例えば、公知の細線化手法であるHilditch法(酒井幸市著"デジタル画像処理の基礎と応用"第2版,ISBN4-7898-3707-6,CQ出版社,2004年2月1日発行,P.51-P.54,等)を用いて、当該得られた2値画像の細線化処理を行う。
図5は、図4における端点間毎輪郭(周回)ベクトル抽出部5の構成例をより詳細に示す図である。同図において、図4と同様に50は入力画像ラスタ走査部であり、画像入出力I/O(3)を介して信号線500より細線化済2値画像データを順次入力する。
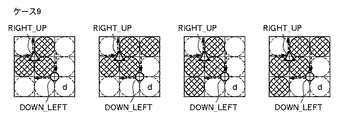
次にステップS28に進み、図6の「3」の位置の画素に注目し、f(3)=1ならステップS29へ進み、レジスタの内容に8を加えるが、そうでなければステップS30へ進む。ステップS30では、レジスタの保持する値の処理番号のルーチンをコールする。
端点間毎輪郭(周回)ベクトル抽出部300より得られた、端点間毎輪郭(周回)ベクトル(即ち、線図形の端点(交点)位置に対応する部分から抽出されたものか否か等を表す情報(付与情報)と、端点や交点間をつなぐ線素(独立した線や閉曲線)毎のそれぞれに対応したベクトル列の集まり(端点間毎線素粗輪郭ベクトル)とで構成される)を入力し、付与情報を利用して、一画素幅の幅を持った線素の輪郭(周回)ベクトルの各ベクトルの位置をそれぞれ半画素分ずつ相応する方向へ予め定める規則により微調整することによって、幅0に線芯化された端点間毎線芯(周回)化済ベクトルを生成する。なお、端点間毎線芯(周回)化済ベクトルもまた、例えば、図29に示したような形式として表現でき、本実施形態では、この形式で出力されるものとする。
次に、図32(b)を用いて、終端点としたい端点Pnの直後に挿入する補助輪郭点Pn+1の挿入方法を説明する。補助輪郭点Pn+1を終点とする補助ベクトルVnが、終端点としたい端点Pnの直前の輪郭点Pn-1を終点とするベクトルVn-2と逆向きになるように、補助輪郭点Pn+1を定める。このようにすれば、上述の抽出条件(1)から、ベクトルVn-1が接線線分となる。また、補助輪郭点Pn+1を終点とする補助ベクトルVnが上述の接線線分の抽出条件(3)を満たすように十分な長さを持つようにする。このようにすれば、補助ベクトルVnもまた接線線分となる。
図29、図37(a)、図37(b)に示したデータ形式は、一例にすぎず、本発明の趣旨はこれに限定されるものではない。例えば、端点間毎平滑化済(非周回)ベクトルは、SVG形式のベクトル表現をとって出力することも可能である。また、各ベクトル列中の輪郭点数のみをまとめて、輪郭点数テーブル部と各ベクトル列中の各ベクトルのデータ部とを分離して表現することも可能である。例えば、図29の輪郭線中の総点数の部分のみ第一番目の輪郭から第a番目の輪郭までまとめた部分を作り、その後に、第一番目の輪郭から第a番目の輪郭までの輪郭点データをまとめた部分とするように出力形式を構成してもよい。あるいは、始端点・終端点情報としては、図37(a)に示した閉ループマーカに限るものではなく、例えば、始端点・終端点が存在するベクトル列を区別することが可能なものであればよい。
なお、本発明の目的は、前述した実施形態の機能を実現するソフトウェアのプログラムコード(コンピュータプログラム)を記録した記憶媒体を、システムあるいは装置に供給することによっても、達成されることは言うまでもない。また、システムあるいは装置のコンピュータ(またはCPUやMPU)が記憶媒体に格納されたプログラムコードを読出し実行することによっても、達成されることは言うまでもない。このコンピュータプログラムは、上述したフローチャートに記載したステップを情報処理装置に実行させることになる。言い換えると、このコンピュータプログラムは、コンピュータを図1に示した各処理部(処理手段)として機能させるためのプログラムである。
Claims (21)
- 抽出手段が、細線化された線図形の端点と交点とに基づいて、前記細線化された線図形の端点と端点の間、または端点と交点の間、または交点と交点の間をつなぐ線素または閉曲線ごとに前記細線化された線図形を分割し、当該分割された線素および閉曲線それぞれの輪郭情報を抽出する抽出工程と、
線芯化手段が、前記抽出工程で抽出された輪郭情報の位置を半画素単位に調整することにより、線芯化されたベクトルデータを生成する線芯化工程と、
を有することを特徴とする画像処理方法。 - 抽出手段が、細線化された線画像を含む画像を、画素マトリクス単位でラスタ走査し、前記画素マトリクス内の注目画素の値と前記注目画素の周囲の画素値とを、予め定めたパターンのいずれに該当するか判定し、当該判定されたパターンに応じて定められているベクトル列に基づいて、前記細線化された線図形の端点と端点の間、または端点と交点の間、または交点と交点の間をつなぐ線素または閉曲線それぞれの輪郭情報を抽出する抽出工程と、
線芯化手段が、前記抽出工程で抽出された輪郭情報に基づいて、線芯化されたベクトルデータを生成する線芯化工程と、
を有することを特徴とする画像処理方法。 - 抽出手段が、細線化された線図形の端点と交点とに基づいて、前記細線化された線図形の端点と端点の間、または端点と交点の間、または交点と交点の間をつなぐ線素または閉曲線ごとに前記細線化された線図形を分割し、当該分割された線素および閉曲線それぞれの輪郭情報を抽出する抽出工程と、
線芯化手段が、前記抽出工程で抽出された輪郭情報に基づいて、線芯化されたベクトルデータを生成する線芯化工程と、
補助ベクトル付きデータ生成手段が、前記線図形における端点または交点に関する情報に基づいて、前記線芯化されたベクトルデータの始端点と終端点とを判別し、当該判別された終端点と始端点との間に挿入する補助ベクトルを生成し、当該生成された補助ベクトルが付加された補助ベクトル付きベクトルデータを生成する補助ベクトル付きデータ生成工程と、
を有することを特徴とする画像処理方法。 - 細線化手段が、線図形を含む2値画像に対して細線化処理を行うことにより、細線化された線図形を得る細線化工程と、
抽出手段が、前記細線化工程で得た前記細線化された線図形を、当該細線化された線図形の端点と端点の間、または端点と交点の間、または交点と交点の間をつなぐ線素または閉曲線ごとに分割し、当該分割して得られた前記細線化された線図形の線素および閉曲線それぞれに基づいて、前記細線化された線図形の線素および閉曲線それぞれを囲む輪郭情報を抽出する抽出工程と、
線芯化手段が、前記抽出工程で抽出された輪郭情報に基づいて、線芯化されたベクトルデータを生成する線芯化工程と、
を有することを特徴とする画像処理方法。 - 細線化された線図形の端点と交点とに基づいて、前記細線化された線図形の端点と端点の間、または端点と交点の間、または交点と交点の間をつなぐ線素または閉曲線ごとに前記細線化された線図形を分割し、当該分割された線素および閉曲線それぞれの輪郭情報を抽出する抽出手段と、
前記抽出手段で抽出された輪郭情報の位置を半画素単位に調整することにより、線芯化されたベクトルデータを生成する線芯化手段と、
を備えることを特徴とする画像処理装置。 - 前記抽出手段で抽出される輪郭情報には、前記線素または前記閉曲線ごとの輪郭ベクトルと、前記線図形における端点または交点に対応する前記輪郭ベクトルを示す輪郭点情報とを含むことを特徴とする請求項5に記載の画像処理装置。
- 前記輪郭点情報には、前記輪郭ベクトルを構成する輪郭点が終点となる前記輪郭ベクトルの向き、及び輪郭点が始点となる前記輪郭ベクトルの向きに関する情報が含まれることを特徴とする請求項6に記載の画像処理装置。
- 前記抽出手段は、前記細線化された線画像を含む画像を、画素マトリクス単位でラスタ走査し、前記画素マトリクス内の注目画素の値と前記注目画素の周囲の画素値とを、予め定めたパターンのいずれに該当するか判定し、当該判定されたパターンに応じて定められているベクトル列に基づいて、前記細線化された線図形の端点と端点の間、または端点と交点の間、または交点と交点の間をつなぐ線素または閉曲線それぞれの輪郭情報を抽出することを特徴とする請求項5乃至7のいずれか1項に記載の画像処理装置。
- 前記画素マトリクスのサイズは、3画素×3画素であることを特徴とする請求項8に記載の画像処理装置。
- 前記線図形における端点または交点に関する情報に基づいて、前記線芯化されたベクトルデータの始端点と終端点とを判別し、当該判別された終端点と始端点との間に挿入する補助ベクトルを生成し、当該生成された補助ベクトルが付加された補助ベクトル付きベクトルデータを生成する補助ベクトル付きデータ生成手段を、更に有することを特徴とする請求項5乃至9のいずれか1項に記載の画像処理装置。
- 前記補助ベクトル付きデータ生成手段は、前記線図形における端点または交点に基づいて、前記線芯化されたベクトルデータに始端点と終端点とがないと判別した場合、閉ループであることを示す情報を当該ベクトルデータに付加することを特徴とする請求項10に記載の画像処理装置。
- 前記補助ベクトル付きベクトルデータに対して、平滑化処理を実行する平滑化手段と、
前記平滑化処理により平滑化されたベクトルデータと、前記始端点と前記終端点とに基づいて、平滑化された始端点から終端点へ向かう1方向のベクトルデータを生成する非周回ベクトルデータ生成手段と
を更に有することを特徴とする請求項10に記載の画像処理装置。 - 2値画像に対して細線化処理を行うことにより、前記細線化された線図形を得る細線化手段を更に備え、
前記抽出手段では、前記細線化手段で得た前記細線化された線図形の端点と交点とに基づいて、前記細線化された線図形の端点と端点の間、または端点と交点の間、または交点と交点の間をつなぐ線素または閉曲線ごとに前記細線化された線図形を分割し、当該分割された線素および閉曲線それぞれの輪郭情報を抽出することを特徴とする請求項5乃至12のいずれか1項に記載の画像処理装置。 - 細線化された線画像を含む画像を、画素マトリクス単位でラスタ走査し、前記画素マトリクス内の注目画素の値と前記注目画素の周囲の画素値とを、予め定めたパターンのいずれに該当するか判定し、当該判定されたパターンに応じて定められているベクトル列に基づいて、前記細線化された線図形の端点と端点の間、または端点と交点の間、または交点と交点の間をつなぐ線素または閉曲線それぞれの輪郭情報を抽出する抽出手段と、
前記抽出手段で抽出された輪郭情報に基づいて、線芯化されたベクトルデータを生成する線芯化手段と、
を備えることを特徴とする画像処理装置。 - 細線化された線図形の端点と交点とに基づいて、前記細線化された線図形の端点と端点の間、または端点と交点の間、または交点と交点の間をつなぐ線素または閉曲線ごとに前記細線化された線図形を分割し、当該分割された線素および閉曲線それぞれの輪郭情報を抽出する抽出手段と、
前記抽出手段で抽出された輪郭情報に基づいて、線芯化されたベクトルデータを生成する線芯化手段と、
前記線図形における端点または交点に関する情報に基づいて、前記線芯化されたベクトルデータの始端点と終端点とを判別し、当該判別された終端点と始端点との間に挿入する補助ベクトルを生成し、当該生成された補助ベクトルが付加された補助ベクトル付きベクトルデータを生成する補助ベクトル付きデータ生成手段と、
を備えることを特徴とする画像処理装置。 - 線図形を含む2値画像に対して細線化処理を行うことにより、細線化された線図形を得る細線化手段と、
前記細線化手段で得た前記細線化された線図形を、当該細線化された線図形の端点と端点の間、または端点と交点の間、または交点と交点の間をつなぐ線素または閉曲線ごとに分割し、当該分割して得られた前記細線化された線図形の線素および閉曲線それぞれに基づいて、前記細線化された線図形の線素および閉曲線それぞれを囲む輪郭情報を抽出する抽出手段と、
前記抽出手段で抽出された輪郭情報に基づいて、線芯化されたベクトルデータを生成する線芯化手段と、
を備えることを特徴とする画像処理装置。 - コンピュータを、
細線化された線図形の端点と交点とに基づいて、前記細線化された線図形の端点と端点の間、または端点と交点の間、または交点と交点の間をつなぐ線素または閉曲線ごとに前記細線化された線図形を分割し、当該分割された線素および閉曲線それぞれの輪郭情報を抽出する抽出手段、
前記抽出手段で抽出された輪郭情報の位置を半画素単位に調整することにより、線芯化されたベクトルデータを生成する線芯化手段、として機能させるためのプログラム。 - コンピュータを、
細線化された線画像を含む画像を、画素マトリクス単位でラスタ走査し、前記画素マトリクス内の注目画素の値と前記注目画素の周囲の画素値とを、予め定めたパターンのいずれに該当するか判定し、当該判定されたパターンに応じて定められているベクトル列に基づいて、前記細線化された線図形の端点と端点の間、または端点と交点の間、または交点と交点の間をつなぐ線素または閉曲線それぞれの輪郭情報を抽出する抽出手段、
前記抽出手段で抽出された輪郭情報に基づいて、線芯化されたベクトルデータを生成する線芯化手段、
として機能させるためのプログラム。 - コンピュータを、
細線化された線図形の端点と交点とに基づいて、前記細線化された線図形の端点と端点の間、または端点と交点の間、または交点と交点の間をつなぐ線素または閉曲線ごとに前記細線化された線図形を分割し、当該分割された線素および閉曲線それぞれの輪郭情報を抽出する抽出手段、
前記抽出手段で抽出された輪郭情報に基づいて、線芯化されたベクトルデータを生成する線芯化手段、
前記線図形における端点または交点に関する情報に基づいて、前記線芯化されたベクトルデータの始端点と終端点とを判別し、当該判別された終端点と始端点との間に挿入する補助ベクトルを生成し、当該生成された補助ベクトルが付加された補助ベクトル付きベクトルデータを生成する補助ベクトル付きデータ生成手段、
として機能させるためのプログラム。 - コンピュータを、
線図形を含む2値画像に対して細線化処理を行うことにより、細線化された線図形を得る細線化手段、
前記細線化手段で得た前記細線化された線図形を、当該細線化された線図形の端点と端点の間、または端点と交点の間、または交点と交点の間をつなぐ線素または閉曲線ごとに分割し、当該分割して得られた前記細線化された線図形の線素および閉曲線それぞれに基づいて、前記細線化された線図形の線素および閉曲線それぞれを囲む輪郭情報を抽出する抽出手段、
前記抽出手段で抽出された輪郭情報に基づいて、線芯化されたベクトルデータを生成する線芯化手段、
として機能させるためのプログラム。 - 請求項17乃至20のいずれか1項に記載のプログラムを格納したコンピュータ可読の記憶媒体。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2007085894A JP4928325B2 (ja) | 2006-03-31 | 2007-03-28 | 画像処理方法、画像処理装置、プログラムおよび記憶媒体 |
Applications Claiming Priority (7)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2006100381 | 2006-03-31 | ||
| JP2006100377 | 2006-03-31 | ||
| JP2006100380 | 2006-03-31 | ||
| JP2006100381 | 2006-03-31 | ||
| JP2006100380 | 2006-03-31 | ||
| JP2006100377 | 2006-03-31 | ||
| JP2007085894A JP4928325B2 (ja) | 2006-03-31 | 2007-03-28 | 画像処理方法、画像処理装置、プログラムおよび記憶媒体 |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2007293829A JP2007293829A (ja) | 2007-11-08 |
| JP2007293829A5 JP2007293829A5 (ja) | 2010-05-20 |
| JP4928325B2 true JP4928325B2 (ja) | 2012-05-09 |
Family
ID=38764362
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2007085894A Expired - Fee Related JP4928325B2 (ja) | 2006-03-31 | 2007-03-28 | 画像処理方法、画像処理装置、プログラムおよび記憶媒体 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP4928325B2 (ja) |
Families Citing this family (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US8121415B2 (en) * | 2008-10-28 | 2012-02-21 | Quality Vision International, Inc. | Combining feature boundaries |
| JP5600524B2 (ja) | 2010-08-27 | 2014-10-01 | キヤノン株式会社 | 画像処理装置、画像処理方法、プログラム、および記憶媒体 |
| JP6253440B2 (ja) * | 2014-02-18 | 2017-12-27 | 株式会社Screenホールディングス | ベクトルデータ処理装置、画像記録システム、ベクトルデータ処理方法およびプログラム |
| CN112927288B (zh) * | 2019-11-21 | 2024-03-29 | 北京配天技术有限公司 | 图像坐标提取方法、图像处理设备及存储装置 |
| CN118447264B (zh) * | 2024-06-20 | 2024-09-17 | 湖南国科海防信息技术有限公司 | 一种水声二值图形轮廓提取方法 |
Family Cites Families (10)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS615375A (ja) * | 1984-06-19 | 1986-01-11 | Fujitsu Ltd | 線図形ベクトル化装置 |
| JPS6151271A (ja) * | 1984-08-18 | 1986-03-13 | Fujitsu Ltd | 線図形の折線近似方式 |
| JPH0488480A (ja) * | 1990-07-25 | 1992-03-23 | Meidensha Corp | 図形線分の特徴点抽出方法 |
| JP3026592B2 (ja) * | 1990-10-22 | 2000-03-27 | キヤノン株式会社 | 輪郭抽出方法及びその装置 |
| JP3049672B2 (ja) * | 1991-12-26 | 2000-06-05 | キヤノン株式会社 | 画像処理方法及び装置 |
| JP3668560B2 (ja) * | 1995-07-31 | 2005-07-06 | 株式会社日立製作所 | 線図形の認識方法および認識装置 |
| JP4015245B2 (ja) * | 1997-10-31 | 2007-11-28 | ローランドディー.ジー.株式会社 | 線図形の芯線化処理方法 |
| JPH11272869A (ja) * | 1998-03-20 | 1999-10-08 | Nippon Steel Corp | ラスターデータ編集方法及びラスターデータ編集装置 |
| JP2001222718A (ja) * | 2000-02-08 | 2001-08-17 | Photron Ltd | 画像データ変換方法、画像データ変換システムおよびコンピュータが読取り可能な記憶媒体 |
| NL1024932C2 (nl) * | 2003-12-03 | 2005-06-06 | Prime Vision | Werkwijze en inrichting voor het extraheren van skeletdata uit beelddata. |
-
2007
- 2007-03-28 JP JP2007085894A patent/JP4928325B2/ja not_active Expired - Fee Related
Also Published As
| Publication number | Publication date |
|---|---|
| JP2007293829A (ja) | 2007-11-08 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5058575B2 (ja) | 画像処理装置及びその制御方法、プログラム | |
| US7889938B2 (en) | Method and apparatus for processing line drawings in images | |
| JP5854802B2 (ja) | 画像処理装置、画像処理方法、及びコンピュータプログラム | |
| JP2608571B2 (ja) | 入力走査画像データのベクトル化のための装置及び方法 | |
| KR101235226B1 (ko) | 화상 처리 장치, 화상 처리 방법 및 기록 매체 | |
| CN110400362B (zh) | 一种基于图像的abaqus二维裂纹建模方法、系统及计算机可读存储介质 | |
| JP4928325B2 (ja) | 画像処理方法、画像処理装置、プログラムおよび記憶媒体 | |
| JP2000181992A (ja) | カラー文書画像認識装置 | |
| JP4933404B2 (ja) | 画像処理装置、画像処理方法、画像処理プログラム、並びに、プログラム記録媒体 | |
| JPH0581424A (ja) | ノイズ除去方法 | |
| JP5335581B2 (ja) | 画像処理装置、画像処理方法及びプログラム | |
| JP5137679B2 (ja) | 画像処理装置および画像処理方法 | |
| JP5028174B2 (ja) | 画像処理装置、画像処理方法、及び、画像処理プログラム | |
| JP2003046746A (ja) | 画像処理方法及び画像処理装置 | |
| JP3253201B2 (ja) | 画像処理装置と画像種類判定方法 | |
| JP2010020463A (ja) | 線画処理装置、線画処理方法およびプログラム | |
| JP5013834B2 (ja) | 画像処理装置、画像処理方法、プログラム、及び記憶媒体 | |
| JP4789065B2 (ja) | 画像処理装置および画像処理プログラム | |
| JP5505187B2 (ja) | 画像処理装置およびプログラム | |
| JP2890307B2 (ja) | 表領域分離装置 | |
| JP2008225653A (ja) | 画像処理方法、画像処理装置、及び、プログラム、プログラム記憶媒体 | |
| JP2010034882A (ja) | 画像処理装置及びその方法、プログラム並びに記憶媒体 | |
| JP2006323511A (ja) | 記号認識方法及び装置 | |
| JP2000187730A (ja) | 建設図面の画像データ処理方法及びその装置とそのための制御プログラムを記録したコンピュータ読み取り可能な記録媒体 | |
| JP2000194744A (ja) | 建設図面の画像デ―タ処理方法及びその装置とそのための制御プログラムを記録したコンピュ―タ読み取り可能な記録媒体 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20100326 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20100326 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20110727 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20110801 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20110930 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20120203 |
|
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20120210 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20150217 Year of fee payment: 3 |
|
| R151 | Written notification of patent or utility model registration |
Ref document number: 4928325 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R151 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20150217 Year of fee payment: 3 |
|
| LAPS | Cancellation because of no payment of annual fees |