JP4926414B2 - 索引付けされた機械利用メトリックスを提供するシステム - Google Patents
索引付けされた機械利用メトリックスを提供するシステム Download PDFInfo
- Publication number
- JP4926414B2 JP4926414B2 JP2005154504A JP2005154504A JP4926414B2 JP 4926414 B2 JP4926414 B2 JP 4926414B2 JP 2005154504 A JP2005154504 A JP 2005154504A JP 2005154504 A JP2005154504 A JP 2005154504A JP 4926414 B2 JP4926414 B2 JP 4926414B2
- Authority
- JP
- Japan
- Prior art keywords
- data
- work
- operator
- machine
- operator identification
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
- 238000004891 communication Methods 0.000 claims description 32
- 238000000034 method Methods 0.000 claims description 25
- 238000012545 processing Methods 0.000 claims description 18
- 238000012546 transfer Methods 0.000 claims description 8
- 239000000446 fuel Substances 0.000 claims description 6
- 238000013480 data collection Methods 0.000 claims description 5
- 239000000463 material Substances 0.000 claims description 4
- 239000012530 fluid Substances 0.000 claims description 3
- 230000001747 exhibiting effect Effects 0.000 claims 1
- 230000006870 function Effects 0.000 description 6
- 238000010586 diagram Methods 0.000 description 5
- 238000010276 construction Methods 0.000 description 3
- 238000005065 mining Methods 0.000 description 3
- 238000012795 verification Methods 0.000 description 3
- 230000005540 biological transmission Effects 0.000 description 1
- 238000005553 drilling Methods 0.000 description 1
- 238000011156 evaluation Methods 0.000 description 1
- 239000011159 matrix material Substances 0.000 description 1
- 238000010295 mobile communication Methods 0.000 description 1
- 230000000737 periodic effect Effects 0.000 description 1
- 230000004044 response Effects 0.000 description 1
- 238000012552 review Methods 0.000 description 1
- 230000003068 static effect Effects 0.000 description 1
- 238000012360 testing method Methods 0.000 description 1
- 230000001960 triggered effect Effects 0.000 description 1
Images







Classifications
-
- G—PHYSICS
- G07—CHECKING-DEVICES
- G07C—TIME OR ATTENDANCE REGISTERS; REGISTERING OR INDICATING THE WORKING OF MACHINES; GENERATING RANDOM NUMBERS; VOTING OR LOTTERY APPARATUS; ARRANGEMENTS, SYSTEMS OR APPARATUS FOR CHECKING NOT PROVIDED FOR ELSEWHERE
- G07C5/00—Registering or indicating the working of vehicles
- G07C5/08—Registering or indicating performance data other than driving, working, idle, or waiting time, with or without registering driving, working, idle or waiting time
- G07C5/0808—Diagnosing performance data
-
- G—PHYSICS
- G07—CHECKING-DEVICES
- G07C—TIME OR ATTENDANCE REGISTERS; REGISTERING OR INDICATING THE WORKING OF MACHINES; GENERATING RANDOM NUMBERS; VOTING OR LOTTERY APPARATUS; ARRANGEMENTS, SYSTEMS OR APPARATUS FOR CHECKING NOT PROVIDED FOR ELSEWHERE
- G07C5/00—Registering or indicating the working of vehicles
- G07C5/08—Registering or indicating performance data other than driving, working, idle, or waiting time, with or without registering driving, working, idle or waiting time
- G07C5/0841—Registering performance data
Landscapes
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Operation Control Of Excavators (AREA)
- Management, Administration, Business Operations System, And Electronic Commerce (AREA)
- Time Recorders, Dirve Recorders, Access Control (AREA)
Description
110 場外システム
120 作業機械
122 アンテナ
124 実装システム
130 作業機械
132 アンテナ
134 実装システム
140 作業機械
142 アンテナ
144 実装システム
210 通信モジュール
215 データリンク
220 インターフェース制御システム
230−1〜230−N 実装モジュール
240−1〜240−Y 実装部品
310 無線周波数装置
402 作業機械#3及び操作者#1のガス消費量
404 作業機械#2及び操作者#4のガス消費量
406 勾配傾斜20°における、作業機械#1及び操作者#1のガス消費量
408 勾配傾斜40°における、作業機械#2及び操作者#1のガス消費量
502 作業データ(Lw/hr)
504 作業データ(Lw/hr)
506 作業データ(Lw/hr)
508 作業データ(Lw/hr)
512 作業機械#1及び操作者#1と、作業機械#2及び操作者#2のメトリックス分類
514 作業機械#3及び操作者#3と、作業機械#4及び操作者#4のメトリックス分類
602 ステップ−操作者識別情報の受信
604 ステップ−操作者を識別情報に基づいて照合
606 ステップ−作業データの受信
608 ステップ−操作者識別情報に対して索引付けされた作業データ及び作業機械関連パラメータ(必要に応じて)を記憶
610 ステップ−実装システムにて索引付けされた作業データを分析
612 ステップ−場外システムに転送
614 ステップ−索引付けされた作業データを分析用に分類
616 ステップ−個別の操作者用の情報を分析
618 ステップ−索引付けされた作業データを分類し、識別された群に対して分析
620 ステップ−結果生じるメトリックス情報を操作者に報告
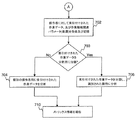
702 ステップ−操作者に対して索引付けされた作業データ、及び作業機械関連パラメータ(最適)を受信及び記憶
703 ステップ−索引付けされた作業データを分析用に分類?
704 ステップ−個別の操作者用に索引付けされた作業データを分析
706 ステップ−索引付けされた作業データを分類し、識別された群用に分析
710 ステップ−メトリックス情報を報告
Claims (10)
- 効率的または非効率ないずれかの動作を示す第1機械および操作者の少なくとも一方を決定するために用いられる測定基準を提供するシステムであって、
操作者識別データに基づいて第1機械の操作者を識別するように構成された操作者識別装置と、
第1機械に関係する作業データおよび該第1機械が用いられている作業現場のパラメータを収集するように構成された作業データ収集装置と、
該操作者識別データに対して該作業データおよび該パラメータを関係付けるように構成された第1の処理装置と、
該操作者識別データに対して関係付けられた該作業データおよび該パラメータを転送するように構成された通信装置と、
該操作者識別データに対して関係付けられた該作業データおよび該パラメータを受信し、該操作者識別データに対して関係付けられた該作業データおよび該パラメータに基づいて第1機械と操作者のうちの少なくとも1つに関連する定量的な性能値を反映する測定基準を提供するように構成された第2の処理装置と
を備えるシステム。 - 操作者識別装置は、無線周波数識別装置である請求項1に記載のシステム。
- 作業データ収集装置は、実装モジュールと実装部品のうちの少なくとも1つを備える請求項1に記載のシステム。
- 実装モジュールと実装部品のうちの少なくとも1つにより収集された作業データは、第1機械の少なくとも1つの動作パラメータに関係する性能データである請求項3に記載のシステム。
- 作業データは、燃料消費量、アイドル時間、エンジン始動回数、運搬される材料の重量、動作時間、第1機械により扱われた材料の種類、地形の特徴データ、流体関連データ、作業現場関連データ、及び走行距離のうちの少なくとも1つを表すデータを含んでいる請求項1に記載のシステム。
- 第2の処理装置は、該操作者識別データに対して関係付けられた該作業データおよび該パラメータを分析し、一群の機械の性能を決定する請求項1に記載のシステム。
- 第2の処理装置は、測定基準を分析し、
操作者と、
機械を動作させる一群の操作者と、
第1機械と類似の種類の一群の機械と、
第1機械と第1作業現場のうちの少なくとも1つに関連する個人とのうち、少なくとも1つの性能を決定する請求項1に記載のシステム。 - 第1の処理装置は、実装モジュールと実装部品のうちの少なくとも1つであり、第2の処理装置は、場外システムの一部である請求項1に記載のシステム。
- 第1の処理装置は、操作者識別データに対して、1つ以上の機械関連パラメータを関係付ける請求項1に記載のシステム。
- 効率的または非効率ないずれかの動作を示す第1機械および操作者の少なくとも一方を決定するために用いられる測定基準を提供する方法であって、
操作者識別データに基づいて第1機械の操作者を識別するステップと、
第1機械から作業データおよび該第1機械が用いられている作業現場のパラメータを収集するステップと、
該操作者識別データに対して該作業データおよび該パラメータを関係付けるステップと、
該操作者識別データに対して関係付けられた該作業データおよび該パラメータを処理システムに転送するステップと、
該操作者識別データに対して関係付けられた該作業データおよび該パラメータを処理システムで受信し、該操作者識別データに対して関係付けられた該作業データおよび該パラメータに基づいて第1機械及び操作者のうちの少なくとも1つに関連する定量的な性能値を反映する測定基準を提供するステップと
を含む方法。
Applications Claiming Priority (4)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| US57478204P | 2004-05-27 | 2004-05-27 | |
| US60/574,782 | 2004-05-27 | ||
| US10/929,688 US7113839B2 (en) | 2004-05-27 | 2004-08-31 | System for providing indexed machine utilization metrics |
| US10/929,688 | 2004-08-31 |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2006018810A JP2006018810A (ja) | 2006-01-19 |
| JP2006018810A5 JP2006018810A5 (ja) | 2008-07-10 |
| JP4926414B2 true JP4926414B2 (ja) | 2012-05-09 |
Family
ID=35433326
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2005154504A Expired - Fee Related JP4926414B2 (ja) | 2004-05-27 | 2005-05-26 | 索引付けされた機械利用メトリックスを提供するシステム |
Country Status (3)
| Country | Link |
|---|---|
| US (1) | US7113839B2 (ja) |
| JP (1) | JP4926414B2 (ja) |
| DE (1) | DE102005015380A1 (ja) |
Families Citing this family (33)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| FI122885B (fi) * | 2005-05-30 | 2012-08-31 | John Deere Forestry Oy | Metsäkoneen suorituskyvyn mittausjärjestelmä |
| US20080059080A1 (en) * | 2006-08-31 | 2008-03-06 | Caterpillar Inc. | Method and system for selective, event-based communications |
| US20080059411A1 (en) * | 2006-08-31 | 2008-03-06 | Caterpillar Inc. | Performance-based job site management system |
| US7765058B2 (en) * | 2006-11-20 | 2010-07-27 | Ford Global Technologies, Llc | Driver input analysis and feedback system |
| JP4935898B2 (ja) * | 2007-03-27 | 2012-05-23 | 富士通株式会社 | 作業指示システム,作業指示方法,作業指示プログラムおよび作業指示装置 |
| US20080269981A1 (en) * | 2007-04-25 | 2008-10-30 | Caterpillar Inc. | System and method for tracking and categorizing machine efficiency |
| US20080270074A1 (en) * | 2007-04-30 | 2008-10-30 | Caterpillar Inc. | User customized machine data acquisition system |
| JP4687698B2 (ja) * | 2007-09-06 | 2011-05-25 | トヨタ自動車株式会社 | 省燃費運転支援装置 |
| GB2455499A (en) * | 2007-12-01 | 2009-06-17 | Airmax Group Plc | Operating an energy efficient crane |
| US9152938B2 (en) | 2008-08-11 | 2015-10-06 | Farmlink Llc | Agricultural machine and operator performance information systems and related methods |
| US11482058B2 (en) | 2008-09-09 | 2022-10-25 | United Parcel Service Of America, Inc. | Systems and methods for utilizing telematics data to improve fleet management operations |
| CN102203810A (zh) | 2008-09-09 | 2011-09-28 | 美国联合包裹服务公司 | 利用远程信息数据改善车队管理运作的系统和方法 |
| US9058707B2 (en) * | 2009-02-17 | 2015-06-16 | Ronald C. Benson | System and method for managing and maintaining abrasive blasting machines |
| JP5208074B2 (ja) * | 2009-08-27 | 2013-06-12 | 日立建機株式会社 | 作業機械の遠隔管理システム |
| US9020669B2 (en) | 2010-12-29 | 2015-04-28 | Cummins Inc. | Hybrid vehicle driver coach |
| US9953468B2 (en) | 2011-03-31 | 2018-04-24 | United Parcel Service Of America, Inc. | Segmenting operational data |
| US9208626B2 (en) | 2011-03-31 | 2015-12-08 | United Parcel Service Of America, Inc. | Systems and methods for segmenting operational data |
| US9973831B2 (en) | 2012-03-08 | 2018-05-15 | Husqvarna Ab | Data collection system and method for fleet management |
| WO2013134709A1 (en) | 2012-03-08 | 2013-09-12 | Husqvarna Ab | Fleet management portal for outdoor power equipment |
| US20140277905A1 (en) * | 2013-03-15 | 2014-09-18 | Deere & Company | Methods and apparatus to manage a fleet of work machines |
| US9805521B1 (en) | 2013-12-03 | 2017-10-31 | United Parcel Service Of America, Inc. | Systems and methods for assessing turns made by a vehicle |
| JP5650865B1 (ja) * | 2013-12-11 | 2015-01-07 | 株式会社小松製作所 | 作業機械の管理方法、管理用コンピュータプログラム及び管理システム |
| GB2522856B (en) * | 2014-02-05 | 2019-05-22 | Adi Strategy Ltd | A maritime vessel dynamic positioning control system comprising an activity monitoring and recording system |
| US9952612B2 (en) | 2015-03-03 | 2018-04-24 | Caterpillar Inc. | Power system having zone-based load sharing |
| US20160334221A1 (en) | 2015-05-11 | 2016-11-17 | United Parcel Service Of America, Inc. | Determining street segment headings |
| GB2539396A (en) * | 2015-06-12 | 2016-12-21 | Adi Strategy Ltd | Dynamic positioning operator verification process and system |
| US20170180440A1 (en) * | 2015-12-22 | 2017-06-22 | Caterpillar Inc. | Information management system and method of delivering data associated with machine |
| WO2017123985A1 (en) * | 2016-01-13 | 2017-07-20 | Harnischfeger Technologies, Inc. | Providing operator feedback during operation of an industrial machine |
| US9988791B2 (en) * | 2016-03-31 | 2018-06-05 | Hitachi Construction Machinery Co., Ltd. | Output characteristic changing system for construction machine |
| US10190289B2 (en) * | 2016-08-02 | 2019-01-29 | Caterpillar Inc. | Systems and methods for determining wear of a ground-engaging tool |
| US10650621B1 (en) | 2016-09-13 | 2020-05-12 | Iocurrents, Inc. | Interfacing with a vehicular controller area network |
| AT16150U1 (de) * | 2017-12-14 | 2019-03-15 | Schmiedlechner Stefan | Kommunikationsvorrichtung für ein Fahrzeug |
| US20220284360A1 (en) * | 2021-03-05 | 2022-09-08 | Caterpillar Inc. | Enhanced tracking of quarry and mining machine operation |
Family Cites Families (26)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US3665397A (en) * | 1970-06-08 | 1972-05-23 | Minicars Inc | Automobile rental system |
| US3624608A (en) * | 1970-06-08 | 1971-11-30 | Manfred Altman | Vehicle shared-use system |
| US4258421A (en) * | 1978-02-27 | 1981-03-24 | Rockwell International Corporation | Vehicle monitoring and recording system |
| US5220968A (en) * | 1992-03-09 | 1993-06-22 | Weber Steven J | Productivity monitoring system for loading machinery |
| US5303163A (en) * | 1992-08-20 | 1994-04-12 | Cummins Electronics Company | Configurable vehicle monitoring system |
| US5400018A (en) * | 1992-12-22 | 1995-03-21 | Caterpillar Inc. | Method of relaying information relating to the status of a vehicle |
| US5463567A (en) * | 1993-10-15 | 1995-10-31 | Caterpillar Inc. | Apparatus and method for providing historical data regarding machine operating parameters |
| US5659470A (en) * | 1994-05-10 | 1997-08-19 | Atlas Copco Wagner, Inc. | Computerized monitoring management system for load carrying vehicle |
| US5862500A (en) * | 1996-04-16 | 1999-01-19 | Tera Tech Incorporated | Apparatus and method for recording motor vehicle travel information |
| US5808907A (en) * | 1996-12-05 | 1998-09-15 | Caterpillar Inc. | Method for providing information relating to a mobile machine to a user |
| US5995898A (en) * | 1996-12-06 | 1999-11-30 | Micron Communication, Inc. | RFID system in communication with vehicle on-board computer |
| US6253129B1 (en) * | 1997-03-27 | 2001-06-26 | Tripmaster Corporation | System for monitoring vehicle efficiency and vehicle and driver performance |
| US6006148A (en) * | 1997-06-06 | 1999-12-21 | Telxon Corporation | Automated vehicle return system |
| US5899947A (en) * | 1997-06-30 | 1999-05-04 | Daimlerchrysler Corporation | Current check module for hand-held vehicle tester |
| US6351695B1 (en) * | 1999-04-23 | 2002-02-26 | Ronald Weiss | Verified common carrier truck operation log |
| JP2000311287A (ja) | 1999-04-28 | 2000-11-07 | Daihatsu Motor Co Ltd | 共用車両の管理システム |
| US6526341B1 (en) * | 1999-06-10 | 2003-02-25 | Qualcomm, Inc. | Paperless log system and method |
| DE10015644A1 (de) * | 2000-03-29 | 2001-10-11 | Bosch Gmbh Robert | Vorrichtung zum Datenaustausch mit einem Kraftfahrzeug |
| US6408232B1 (en) * | 2000-04-18 | 2002-06-18 | Agere Systems Guardian Corp. | Wireless piconet access to vehicle operational statistics |
| JP2002056049A (ja) * | 2000-08-08 | 2002-02-20 | Maeda Corp | 作業者マッチングシステム、方法、及びこれを用いた建築リテールシステム |
| US7034710B2 (en) * | 2000-12-20 | 2006-04-25 | Caterpillar Inc | Apparatus and method for displaying information related to a machine |
| US20030069648A1 (en) * | 2001-09-10 | 2003-04-10 | Barry Douglas | System and method for monitoring and managing equipment |
| JP2003140743A (ja) * | 2001-10-29 | 2003-05-16 | Komatsu Ltd | 機械の操縦履歴管理システム、その操縦履歴管理方法、およびその操縦履歴管理プログラム |
| JP2003248898A (ja) * | 2002-02-22 | 2003-09-05 | Hitachi Ltd | 情報管理システム |
| US20030182033A1 (en) * | 2002-03-25 | 2003-09-25 | Underdahl Craig T | Vehicle usage data tracking system |
| US20050267713A1 (en) * | 2004-05-27 | 2005-12-01 | Caterpillar Inc. | Data acquisition system for generating operator-indexed information |
-
2004
- 2004-08-31 US US10/929,688 patent/US7113839B2/en active Active
-
2005
- 2005-04-04 DE DE102005015380A patent/DE102005015380A1/de not_active Withdrawn
- 2005-05-26 JP JP2005154504A patent/JP4926414B2/ja not_active Expired - Fee Related
Also Published As
| Publication number | Publication date |
|---|---|
| JP2006018810A (ja) | 2006-01-19 |
| US7113839B2 (en) | 2006-09-26 |
| DE102005015380A1 (de) | 2005-12-22 |
| US20050278055A1 (en) | 2005-12-15 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP4926414B2 (ja) | 索引付けされた機械利用メトリックスを提供するシステム | |
| JP5179183B2 (ja) | 無線周波数起動用のシステムおよび方法 | |
| AU2005280608B2 (en) | System and method for controlling machine operations | |
| US10032317B2 (en) | Integrated fleet vehicle management system | |
| US8396788B2 (en) | Cost-based deployment of components in smart item environments | |
| EP2015510B1 (en) | Deployment planning of components in heterogeneous environments | |
| EP2208188B1 (en) | System for collection and distribution of machine data via a cellular device | |
| US20050065678A1 (en) | Enterprise resource planning system with integrated vehicle diagnostic and information system | |
| US6677854B2 (en) | Remote vehicle diagnostic system | |
| US7756736B2 (en) | Working machine management system | |
| US20040199831A1 (en) | Work machine maintenance system | |
| BR112012006981A2 (pt) | métodos para monitorar operação de um veículo e para detectar impactos em um veículo | |
| US10915069B2 (en) | Monitoring system for monitoring usage of uniquely identifiable machine components | |
| AU2022204332A1 (en) | Information management device of work machine, information management method, and information management system | |
| US20080059005A1 (en) | System and method for selective on-board processing of machine data | |
| US20160094425A1 (en) | Telematics behavior configuration systems and methods | |
| US20070101017A1 (en) | System and method for routing information | |
| JP5812626B2 (ja) | 産業車両用稼働管理装置 | |
| CN1900925A (zh) | 提供指示的机器使用规格的系统 | |
| US20230313498A1 (en) | Construction machine and information processing system | |
| US20210374633A1 (en) | Role-based asset tagging for quantification and reporting of asset performance | |
| Zanini et al. | Mobile assets monitoring for fleet maintenance |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20080526 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20080526 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20110222 |
|
| A601 | Written request for extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A601 Effective date: 20110523 |
|
| A602 | Written permission of extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A602 Effective date: 20110526 |
|
| A601 | Written request for extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A601 Effective date: 20110622 |
|
| A602 | Written permission of extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A602 Effective date: 20110627 |
|
| A601 | Written request for extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A601 Effective date: 20110722 |
|
| A602 | Written permission of extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A602 Effective date: 20110727 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20110819 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20120131 |
|
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20120208 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20150217 Year of fee payment: 3 |
|
| R150 | Certificate of patent or registration of utility model |
Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| LAPS | Cancellation because of no payment of annual fees |