JP4889540B2 - 超音波診断装置 - Google Patents
超音波診断装置 Download PDFInfo
- Publication number
- JP4889540B2 JP4889540B2 JP2007084060A JP2007084060A JP4889540B2 JP 4889540 B2 JP4889540 B2 JP 4889540B2 JP 2007084060 A JP2007084060 A JP 2007084060A JP 2007084060 A JP2007084060 A JP 2007084060A JP 4889540 B2 JP4889540 B2 JP 4889540B2
- Authority
- JP
- Japan
- Prior art keywords
- image
- information
- elastic
- unit
- elasticity
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
Images











Landscapes
- Ultra Sonic Daignosis Equipment (AREA)
Description
また、手動あるいは機械的な方法を用いて超音波探触子により被検体を圧迫して超音波受信信号を計測し、計測時間が異なる2つの超音波受信信号のフレームデータに基づいて圧迫により生じた生体組織各部の変位データを求め、当該変位データに基づいて生体組織の弾性を示す弾性画像を作成する超音波診断装置が提案されている(例えば、[特許文献1]参照。)。さらに、超音波探触子による被検体圧迫の他に心拍による生体組織変位を利用して、弾性画像を構成する超音波診断装置が提案されている。
このように、表示領域全体の変位情報に代えて、変位情報の取得が容易である所定の参照領域の変位情報を用いることにより、高精度に診断部位の生体組織の変位情報を計測することができる。
このように、画像表示部に弾性画像と共に時相情報を表示するので、弾性画像が示す時相情報をリアルタイムに確認することができる。
最初に、図1を参照しながら、超音波治療装置100の構成について説明する。
図1は、超音波診断装置100の構成図である。
送信部1は、超音波探触子4を介して被検体16に所定時間間隔で超音波を繰り返し送信する。送信部1は、超音波探触子4を駆動して超音波を発生させるための送波パルスを生成すると共に、送信される超音波の収束点を所定の深さに設定する。受信部2は、超音波探触子4により被検体16から発生する時系列の反射エコー信号を受信し、所定のゲインで増幅してRF信号すなわち受波信号を生成する。超音波送受信制御部3は、送信部1と受信部2とを制御する。
断層画像構成部6は、整相加算部5からのRF信号フレームデータに基づいて被検体16の濃淡断層画像、例えば、白黒断層画像を構成する。断層画像構成部6は、整相加算部5からのRF信号フレームデータを入力してゲイン補正、ログ圧縮、検波、輪郭強調、フィルタ処理等の信号処理を行い、断層画像データを取得する。
白黒スキャンコンバータ7は、断層画像構成部6から出力される断層画像データを画像表示部9の表示データに変換する。白黒スキャンコンバータ7は、断層画像構成部6からの断層画像データをデジタル信号に変換するA/D変換器と、変換された複数の断層画像データを時系列に記憶するフレームメモリと、制御コントローラを有する。白黒スキャンコンバータ7は、フレームメモリに格納された断層フレームデータを1画像として取得し、取得された断像フレームデータをテレビ同期で読み出して画像表示部9に出力する。
尚、移動ベクトルの検出には、例えば、ブロックマッチング法を用いることができる。ブロックマッチング法は、画像を例えばN×N画素からなるブロックに分け、関心領域内のブロックに着目し、着目しているブロックに最も近似しているブロックを前のフレームから探索し、これを参照して予測符号化処理すなわち差分処理により標本値を決定する処理である。
圧力計測部12は、被検体16に生じる血圧等の圧力を計測する。圧力計測部12は、上腕等で計測された血圧値等を弾性情報演算部13に出力する。
例えば、変位計測部11により計測された変位をL(X)、圧力計測部12により計測された圧力をP(X)、空間座標をXとすると、歪み値ΔS(X)は、ΔS(X)=ΔL(X)/ΔX、である。また、弾性値としてのヤング率Ym(X)は、Ym=(ΔP(X))/ΔS(X)、である。ヤング率Ym(X)から断層画像の各点に相当する生体組織の弾性値を求めることにより、2次元の弾性画像データを連続的に取得することができる。尚、ヤング率は、物体に加えられた単純引張り応力の引張りに平行に生じる歪みに対する比である。
カラースキャンコンバータ15は、弾性画像構成部14の出力信号を画像表示部9の表示データに変換する。カラースキャンコンバータ15は、弾性画像構成部14からの弾性フレームデータに色相情報を付与する。すなわち、カラースキャンコンバータ15は、弾性フレームデータに基づいて赤(R)緑(G)青(B)の光の三原色のデータに変換する。カラースキャンコンバータ15は、例えば、歪みが大きい弾性データを赤色データに変換すると同時に歪みが小さい弾性データを青色データに変換する。
画像表示部9は、上記合成された合成画像を表示する。時相情報表示部17は、変位計測部11から出力される時相情報を表示する。時相情報は、合成画像と共に画像表示部9に表示される。
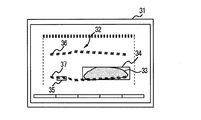
図2は、画像表示部9に表示される画面31を示す図である。
画面31には、血管32及びプラーク33と共に表示領域34及び参照領域35が表示される。表示領域34は、カラー弾性画像が表示される領域である。表示領域34は、診断対部位であるプラーク33の周辺に設定される。参照領域35は、生体組織の変位情報が計測される領域である。参照領域35は、生体組織の変位情報を取得するために、血管32の内腔ではなく、血管32の上壁36あるいは下壁37の周辺に設定することが望ましい。尚、参照領域35は、表示領域34の外部に設定してもよいし、表示領域34の内部に設定してもよい。
次に、図3〜図6を参照しながら、本発明の実施形態に係る変位計測部11について説明する。
変位計測部11は、参照領域演算部11−1及び表示領域演算部11−2及び時相判定部11−3から構成される。参照領域演算部11−1は、参照領域35内の生体組織の変位情報を算出する。表示領域演算部11−2は、表示領域34内の生体組織の変位情報を算出する。時相判定部11−3は、生体組織の変位情報に基づいて心拍による各時相を判定する。
参照領域演算部11−1及び表示領域演算部11−2は、同様の処理を行う。参照領域演算部11−1及び表示領域演算部11−2は、整相加算部5及びRF信号フレームデータ選択部10から出力されるRF信号フレームデータに対してブロックマッチング法を適用し、生体組織の移動先を推定して変位情報を算出する。生体組織の変位情報は、生体組織の変位方向や変位量に関する情報である。尚、参照領域演算部11−1は、変位情報として主として変位方向を算出する。
ブロックマッチング法の場合には、参照領域35が複数分割されてブロック41が設定される。XY座標軸は、ブロック41の変位量及び変位方向(プラス方向あるいはマイナス方向)を示す。
図4(a)及び図4(b)に示すように、血管32の下壁37に参照領域35が設定され、血管32の内腔径が「D」から「D’」に拡大した場合、図4(c)及び図4(d)に示すように、参照領域35のブロック41内の生体組織は、下方向に移動する。参照領域35に含まれる複数のブロック41は、XY座標系では、マイナスの領域においてマッチング(相関)が最大となる。尚、血管32の内腔径の拡大期間は、心拍時相の収縮期に相当する。
図5(a)及び図5(b)に示すように、血管32の下壁37に参照領域35が設定され、血管32の内腔径が「D’」から「D」に縮小した場合、図5(c)及び図5(d)に示すように、参照領域35のブロック41内の生体組織は、上方向に移動する。参照領域35に含まれる複数のブロック41は、XY座標系では、プラスの領域においてマッチング(相関)が最大となる。尚、血管32の内腔径の縮小期間は、心拍時相の拡張期に相当する。
時相判定部11−3は、時相判定部11−3aと時相情報出力部11−3bとから構成される。時相判定部11−3aは、参照領域演算部11−1によって計測された生体組織の変位方向に基づいて心拍時相を判定する。時相情報出力部11−3bは、時相判定部11−3aによって判定された時相情報を出力する。時相情報は、弾性情報演算部13が算出する弾性フレームデータに付加される。
図7(a)に示すように、心拍時相の収縮末期である「A」点まで区間では方向符号が「+」であり、血管32の上壁36はプラス方向に変位する。収縮末期「A」点を過ぎ拡張末期である「B」点までの区間では、方向符号が「−」であり、血管32の上壁36はマイナス方向に変位する。図7(b)に示すように、血管32の下壁37では、方向符号及び変位方向が図7(a)の場合と逆になる。
時相情報出力部11−3bは、時相判定部11−3aによって判定された方向符号及び辺に方向をに基づいて、心拍時相の時相情報を出力する。時相情報出力部11−3bは、判定された方向符号及び変位方向を示す1ビットの時相情報を出力する。時相情報出力部11−3bは、例えば、方向符号「+」と判定された時相に対して「0」を出力し、方向符号「−」と判定された時相に対して「1」を出力する。
このように、表示領域全体の変位情報に代えて、変位情報の取得が容易である所定の参照領域の変位情報を用いることにより、高精度に診断部位の生体組織の変位方向を計測することができる。
次に、図8及び図9を参照しながら、本発明の実施形態に係る弾性画像構成部14について説明する。
弾性画像構成部14は、弾性値評価部14−1と表示画像選択部14−2と表示画像構成部14−3とから構成される。弾性値評価部14−1は、弾性情報演算部13が算出した弾性フレームデータが適正であるか否かを評価する。表示画像選択部14−2は、弾性値評価部14−1の評価に基づいて表示する弾性フレームデータを選択する。表示画像構成部14−3は、表示画像選択部14−2によって選択された弾性フレームデータに基づいて表示画像を構成する。
表示画像選択部14−2は、弾性フレームデータに付加された時相情報に基づいて、時相情報「1」の場合には弾性値評価部14−1から出力される弾性フレームデータ43をそのまま後段の表示画像構成部14−3に出力する。一方、表示画像選択部14−2は、時相情報「0」の場合には弾性値や歪み値が「0」のフレームデータ44を後段の表示画像構成部14−3に出力する。すなわち、診断用の弾性画像として表示されない。
次に、図10を参照しながら、本発明の実施形態に係る時相情報表示部17について説明する。
図10は、弾性画像と共に時相情報が表示された画面47を示す図である。
時相表示欄49では、現在の心拍時相と過去の心拍時相とを識別可能に表示を行うことが望ましい。例えば、現在の心拍時相を実線や黒点で表示し、過去の心拍時相を破線や点線で表示してもよい。また、異なる色相で表示することにより、現在の心拍時相と過去の心拍時相とを識別可能としてもよい。
次に、図11を参照しながら本発明の実施形態に係る弾性情報演算部13について説明する。
弾性画像構成部14は、歪み値演算部13−1及び弾性情報保存部13−2及び弾性値演算部13−3及び切替部13−4から構成される。
弾性情報保持部13−2に保持された歪み値は、データ収集後、弾性値演算部13−3を介して、弾性画像や弾性値と共に後段の弾性画像構成部14に出力される。
切替部13−4は、弾性画像構成部14に出力する情報を切り替える。
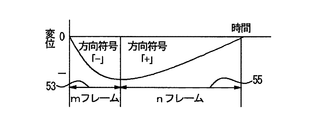
図12は、血管32の下壁37に設定された参照領域35の生体組織の変位を示す図である。
図12では、心拍時相の拡張末期から収縮末期までの区間53では、変位方向はマイナス方向(方向符号「−」)である。心拍時相の収縮末期から拡張末期までの区間55では、変位方向はプラス方向(方向符号「+」)である。また、区間53では、変位方向がマイナス方向であるフレームがmフレーム(例えば、5フレーム)であり、区間55では、変位方向がプラス方向であるフレームがnフレーム(例えば、15フレーム)である。尚、一般に心拍時相の収縮期では拡張期と比較して生体組織が急峻に変化するので、m<n、である。
圧力計測部12は、被検体16の血圧値を計測し、最大血圧値BPmax及び最小血圧値BPmin及び差圧BPsub(=BPmax−BPmin)を弾性値演算部13−3に出力する。
Pframe=BPsub/m………[式1]
Ym(X)=Pframe/ΔS(X)………[式2]
弾性情報保存部13−2は、複数フレームに関する弾性情報を保持するフレームメモリである。弾性情報保存部13−2は、歪み値演算部13−1によって時系列に計測されたフレーム単位の歪み値と、時相判定部11−3によって計測された時相情報とを1フレームの弾性情報として複数フレーム分保持する。
検査終了後は、超音波診断装置100は、オフライン処理を行い、弾性情報保存部13−2から弾性フレームデータの歪み値や時相情報を読み出し、圧力計測部12から血圧値等の圧力値を取得する。超音波診断装置100は、弾性値演算部13−3によって、読み出された歪み値と計測された圧力値を用いて弾性値の近似計算を行い、弾性画像を構成して再表示する。
次に、図13を参照しながら、特定の解析ライン63に関する弾性値表示について説明する。
図13は、解析ライン63に関する弾性値表示欄65が表示された画面61を示す図である。
上述の実施形態では、診断画像の表示領域34では、算出された弾性値に基づいてカラー表示されるものとして説明したが、弾性値の表示形態についてはこれに限られない。
以上詳細に説明したように、本発明の実施形態に係る超音波診断装置は、診断部位に対して直接外的圧力を作用させることなく、血圧値等を計測することにより診断部位の圧力計測を行うので、被検体の体表付近だけでなく深部の生体組織の弾性画像を高精度に表示することができる。また、弾性フレームデータ間に作用する圧力として血圧値の差圧を用いることにより、定量的な弾性値を簡便に算出することができる。また、心拍による生体組織の変位方向を検出することにより、各時相と対応付けて弾性画像を表示することができる。また、診断画像の表示領域と比較して変位の大きい参照領域において生体組織の変位方向を検出することにより、時相情報をより正確に取得することができる。
2………受信部
3………超音波送受信制御部
4………探触子
5………整相加算部
6………断層画像構成部
7………白黒スキャンコンバータ
8………切替加算部
9………画像表示部
10………RF信号フレームデータ選択部
11………変位計測部
11−1………参照領域演算部
11−2………表示領域演算部
11−3………時相判定部
11−3a………時相判定部
11−3b………時相情報出力部
12………圧力計測部
13………弾性情報演算部
13−1………歪み値演算部
13−2………弾性情報保存部
13−3………弾性値演算部
13−4………切替部
14………弾性画像構成部
14−1………弾性値評価部
14−2………表示画像選択部
14−3………表示画像構成部
15………カラースキャンコンバータ
16………被検体
17………心拍情報表示部
31、47−1〜47−3、61………画面
32………血管
33………プラーク
34………表示領域
35………参照領域
36………上壁
37………下壁
41………ブロック
43………弾性フレームデータ(表示)
44………弾性フレームデータ(非表示)
49………時相表示欄
53………区間(収縮期)
55………区間(拡張期)
63………解析ライン
65………弾性値ライン表示欄
Claims (6)
- 生体組織との間で超音波を送受信する超音波探触子と、前記超音波探触子からの出力信号に基づいて前記生体組織の断層画像を構成する断層画像構成手段と、前記超音波探触子からの出力信号に基づいて前記生体組織の変位情報を計測する変位計測手段と、前記計測された変位情報に基づいて弾性情報を算出する弾性情報演算手段と、前記算出された弾性情報に基づいて前記生体組織の弾性画像を構成する弾性画像構成手段と、前記断層画像及び前記弾性画像を表示する画像表示手段と、を備える超音波診断装置において、
前記生体組織に作用する圧力値を計測する圧力計測手段と、
前記圧力計測手段により計測された所定期間の圧力差及び前記弾性画像のフレーム数に基づいて、前記弾性画像のフレーム間に作用する圧力値を算出するフレーム圧力算出手段と、
前記弾性情報演算手段によって算出された弾性情報と前記フレーム圧力算出手段によって算出された前記弾性画像のフレーム間に作用する圧力値とに基づいて、前記生体組織の弾性値を算出する弾性値算出手段と、
を具備することを特徴とする超音波診断装置。 - 前記弾性画像の表示領域とは異なる参照領域を設定する参照領域設定手段を具備し、
前記変位計測手段は、前記設定された参照領域の生体組織の変位情報を計測し、
前記弾性情報演算手段は、前記計測された参照領域の生体組織の変位情報に基づいて、前記弾性情報を算出することを特徴とする請求項1に記載の超音波診断装置。 - 前記変位計測手段は、前記変位情報として前記生体組織の変位方向を計測し、
前記変位計測手段によって計測される前記生体組織の変位方向に基づいて時相情報を判定する時相判定手段を具備し、
前記画像表示手段は、前記弾性画像と共に前記判定された時相情報を識別可能に表示することを特徴とする請求項1または請求項2に記載の超音波診断装置。 - 前記弾性情報演算手段によって算出された弾性情報と前記時相判定手段によって判定された時相情報とを保持する弾性情報保持手段を具備することを特徴とする請求項1から請求項3までのいずれかに記載の超音波診断装置。
- 前記時相判定手段によって判定された時相情報に基づいて前記画像表示手段に表示させる前記弾性画像のフレームを選択するフレーム選択手段を具備することを特徴とする請求項1から請求項4までのいずれかに記載の超音波診断装置。
- 前記弾性画像の表示領域に対して解析ラインを設定する解析ライン設定手段と、
前記設定された解析ラインについて、前記弾性値算出手段により算出された弾性値をグラフ表示することを特徴とする請求項1から請求項5までのいずれかに記載の超音波診断装置。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2007084060A JP4889540B2 (ja) | 2007-03-28 | 2007-03-28 | 超音波診断装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2007084060A JP4889540B2 (ja) | 2007-03-28 | 2007-03-28 | 超音波診断装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2008237664A JP2008237664A (ja) | 2008-10-09 |
| JP4889540B2 true JP4889540B2 (ja) | 2012-03-07 |
Family
ID=39909701
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2007084060A Expired - Fee Related JP4889540B2 (ja) | 2007-03-28 | 2007-03-28 | 超音波診断装置 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP4889540B2 (ja) |
Families Citing this family (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP5426101B2 (ja) * | 2008-02-25 | 2014-02-26 | 株式会社東芝 | 超音波診断装置及、超音波画像処理装置及び超音波画像処理プログラム |
| JP5688369B2 (ja) * | 2009-09-10 | 2015-03-25 | 株式会社日立メディコ | 超音波診断装置及び弾性画像表示方法 |
| JP5677757B2 (ja) | 2010-03-16 | 2015-02-25 | ジーイー・メディカル・システムズ・グローバル・テクノロジー・カンパニー・エルエルシー | 超音波診断装置 |
| JP5999935B2 (ja) * | 2012-03-13 | 2016-09-28 | 伸治 久米 | 超音波診断装置 |
| KR101512291B1 (ko) | 2013-05-06 | 2015-04-15 | 삼성메디슨 주식회사 | 의료 영상 장치 및 의료 영상 제공 방법 |
Family Cites Families (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP3268396B2 (ja) * | 1992-05-15 | 2002-03-25 | 石原 謙 | 超音波診断装置 |
| JPH09140711A (ja) * | 1995-11-21 | 1997-06-03 | Ge Yokogawa Medical Syst Ltd | 時相自動判定方法及び超音波診断装置 |
| JP4515799B2 (ja) * | 2004-03-24 | 2010-08-04 | 株式会社日立メディコ | 超音波診断装置 |
| EP1834588B1 (en) * | 2005-01-04 | 2011-07-13 | Hitachi Medical Corporation | Ultrasonographic device, ultrasonographic program, and ultrasonographic method |
| JP5258291B2 (ja) * | 2005-06-07 | 2013-08-07 | 株式会社日立メディコ | 超音波診断装置及び超音波弾性像取得方法 |
| JP4769047B2 (ja) * | 2005-08-18 | 2011-09-07 | 株式会社東芝 | 超音波診断装置及び超音波画像表示装置 |
-
2007
- 2007-03-28 JP JP2007084060A patent/JP4889540B2/ja not_active Expired - Fee Related
Also Published As
| Publication number | Publication date |
|---|---|
| JP2008237664A (ja) | 2008-10-09 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5559788B2 (ja) | 超音波診断装置 | |
| JP4314035B2 (ja) | 超音波診断装置 | |
| JP5465671B2 (ja) | 超音波診断装置 | |
| JP5199690B2 (ja) | 超音波診断装置 | |
| JP4455003B2 (ja) | 超音波診断装置 | |
| US20110098563A1 (en) | Ultrasonic diagnostic apparatus, ultrasonic image display method and ultrasonic diagnostic program | |
| JPH05317313A (ja) | 超音波診断装置 | |
| JP5156421B2 (ja) | 超音波診断装置 | |
| JP5074097B2 (ja) | 超音波診断装置 | |
| JP2007105400A (ja) | 超音波診断装置及び画像処理装置 | |
| WO2009104657A1 (ja) | 超音波診断装置、超音波画像処理方法及び超音波画像処理プログラム | |
| JPWO2010026823A1 (ja) | 超音波診断装置及び超音波画像表示方法 | |
| JP6358954B2 (ja) | 超音波診断装置 | |
| JP4889540B2 (ja) | 超音波診断装置 | |
| JP5473527B2 (ja) | 超音波診断装置 | |
| WO2011001776A1 (ja) | 超音波診断装置、せん断波の伝搬画像生成方法 | |
| JP5225158B2 (ja) | 超音波診断装置 | |
| JP5623609B2 (ja) | 超音波診断装置 | |
| JP5802790B2 (ja) | 超音波診断装置 | |
| JP4754838B2 (ja) | 超音波診断装置 | |
| JP2007075184A (ja) | 超音波診断装置 | |
| JP4615528B2 (ja) | 超音波診断装置 | |
| JP5574793B2 (ja) | 超音波診断装置 | |
| JP5555286B2 (ja) | 超音波診断装置 | |
| JP2007159945A (ja) | 超音波診断装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20091218 |
|
| TRDD | Decision of grant or rejection written | ||
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20111130 |
|
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20111206 |
|
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20111213 |
|
| R150 | Certificate of patent or registration of utility model |
Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20141222 Year of fee payment: 3 |
|
| S111 | Request for change of ownership or part of ownership |
Free format text: JAPANESE INTERMEDIATE CODE: R313111 |
|
| S533 | Written request for registration of change of name |
Free format text: JAPANESE INTERMEDIATE CODE: R313533 |
|
| R350 | Written notification of registration of transfer |
Free format text: JAPANESE INTERMEDIATE CODE: R350 |
|
| LAPS | Cancellation because of no payment of annual fees |