JP4875750B2 - 風車のピッチ角制御装置及びその方法 - Google Patents
風車のピッチ角制御装置及びその方法 Download PDFInfo
- Publication number
- JP4875750B2 JP4875750B2 JP2009525839A JP2009525839A JP4875750B2 JP 4875750 B2 JP4875750 B2 JP 4875750B2 JP 2009525839 A JP2009525839 A JP 2009525839A JP 2009525839 A JP2009525839 A JP 2009525839A JP 4875750 B2 JP4875750 B2 JP 4875750B2
- Authority
- JP
- Japan
- Prior art keywords
- wind turbine
- pitch angle
- windmill
- pitch
- blade
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
- 238000000034 method Methods 0.000 title claims description 18
- 239000011295 pitch Substances 0.000 claims 29
- 230000005856 abnormality Effects 0.000 description 2
- 230000001133 acceleration Effects 0.000 description 2
- 238000010586 diagram Methods 0.000 description 1
- 230000000694 effects Effects 0.000 description 1
- 210000003746 feather Anatomy 0.000 description 1
- 239000012530 fluid Substances 0.000 description 1
- 230000001360 synchronised effect Effects 0.000 description 1
Images






Classifications
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F03—MACHINES OR ENGINES FOR LIQUIDS; WIND, SPRING, OR WEIGHT MOTORS; PRODUCING MECHANICAL POWER OR A REACTIVE PROPULSIVE THRUST, NOT OTHERWISE PROVIDED FOR
- F03D—WIND MOTORS
- F03D7/00—Controlling wind motors
- F03D7/02—Controlling wind motors the wind motors having rotation axis substantially parallel to the air flow entering the rotor
- F03D7/022—Adjusting aerodynamic properties of the blades
- F03D7/0224—Adjusting blade pitch
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F03—MACHINES OR ENGINES FOR LIQUIDS; WIND, SPRING, OR WEIGHT MOTORS; PRODUCING MECHANICAL POWER OR A REACTIVE PROPULSIVE THRUST, NOT OTHERWISE PROVIDED FOR
- F03D—WIND MOTORS
- F03D7/00—Controlling wind motors
- F03D7/02—Controlling wind motors the wind motors having rotation axis substantially parallel to the air flow entering the rotor
- F03D7/022—Adjusting aerodynamic properties of the blades
- F03D7/024—Adjusting aerodynamic properties of the blades of individual blades
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F03—MACHINES OR ENGINES FOR LIQUIDS; WIND, SPRING, OR WEIGHT MOTORS; PRODUCING MECHANICAL POWER OR A REACTIVE PROPULSIVE THRUST, NOT OTHERWISE PROVIDED FOR
- F03D—WIND MOTORS
- F03D7/00—Controlling wind motors
- F03D7/02—Controlling wind motors the wind motors having rotation axis substantially parallel to the air flow entering the rotor
- F03D7/0264—Controlling wind motors the wind motors having rotation axis substantially parallel to the air flow entering the rotor for stopping; controlling in emergency situations
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F03—MACHINES OR ENGINES FOR LIQUIDS; WIND, SPRING, OR WEIGHT MOTORS; PRODUCING MECHANICAL POWER OR A REACTIVE PROPULSIVE THRUST, NOT OTHERWISE PROVIDED FOR
- F03D—WIND MOTORS
- F03D7/00—Controlling wind motors
- F03D7/02—Controlling wind motors the wind motors having rotation axis substantially parallel to the air flow entering the rotor
- F03D7/0264—Controlling wind motors the wind motors having rotation axis substantially parallel to the air flow entering the rotor for stopping; controlling in emergency situations
- F03D7/0268—Parking or storm protection
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F05—INDEXING SCHEMES RELATING TO ENGINES OR PUMPS IN VARIOUS SUBCLASSES OF CLASSES F01-F04
- F05B—INDEXING SCHEME RELATING TO WIND, SPRING, WEIGHT, INERTIA OR LIKE MOTORS, TO MACHINES OR ENGINES FOR LIQUIDS COVERED BY SUBCLASSES F03B, F03D AND F03G
- F05B2260/00—Function
- F05B2260/70—Adjusting of angle of incidence or attack of rotating blades
- F05B2260/74—Adjusting of angle of incidence or attack of rotating blades by turning around an axis perpendicular the rotor centre line
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F05—INDEXING SCHEMES RELATING TO ENGINES OR PUMPS IN VARIOUS SUBCLASSES OF CLASSES F01-F04
- F05B—INDEXING SCHEME RELATING TO WIND, SPRING, WEIGHT, INERTIA OR LIKE MOTORS, TO MACHINES OR ENGINES FOR LIQUIDS COVERED BY SUBCLASSES F03B, F03D AND F03G
- F05B2270/00—Control
- F05B2270/10—Purpose of the control system
- F05B2270/109—Purpose of the control system to prolong engine life
- F05B2270/1095—Purpose of the control system to prolong engine life by limiting mechanical stresses
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F05—INDEXING SCHEMES RELATING TO ENGINES OR PUMPS IN VARIOUS SUBCLASSES OF CLASSES F01-F04
- F05B—INDEXING SCHEME RELATING TO WIND, SPRING, WEIGHT, INERTIA OR LIKE MOTORS, TO MACHINES OR ENGINES FOR LIQUIDS COVERED BY SUBCLASSES F03B, F03D AND F03G
- F05B2270/00—Control
- F05B2270/30—Control parameters, e.g. input parameters
- F05B2270/328—Blade pitch angle
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y02—TECHNOLOGIES OR APPLICATIONS FOR MITIGATION OR ADAPTATION AGAINST CLIMATE CHANGE
- Y02E—REDUCTION OF GREENHOUSE GAS [GHG] EMISSIONS, RELATED TO ENERGY GENERATION, TRANSMISSION OR DISTRIBUTION
- Y02E10/00—Energy generation through renewable energy sources
- Y02E10/70—Wind energy
- Y02E10/72—Wind turbines with rotation axis in wind direction
Landscapes
- Engineering & Computer Science (AREA)
- Life Sciences & Earth Sciences (AREA)
- Sustainable Development (AREA)
- Sustainable Energy (AREA)
- Chemical & Material Sciences (AREA)
- Combustion & Propulsion (AREA)
- Mechanical Engineering (AREA)
- General Engineering & Computer Science (AREA)
- Physics & Mathematics (AREA)
- Fluid Mechanics (AREA)
- Wind Motors (AREA)
Description
本発明の第1の態様は、複数の風車翼のピッチ角をそれぞれ独立に制御する独立ピッチ角制御を行う風車のピッチ角制御装置であって、風車停止指令が入力された場合に、各前記風車翼のピッチ角を一致させた後、各前記風車翼のピッチ角をフェザーリング位置に移動させる風車のピッチ角制御装置である。
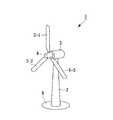
3 ナセル
5−1,5−2,5−3 風車翼
10 風車のピッチ角制御装置
11−1,11−2,11−3 駆動装置
図1は、本実施形態に係る風車の概略構成を示したブロック図である。図1に示すように、風車1は、基礎6の上に立設される支柱2と、支柱2の上端に設置されるナセル3と、略水平な軸線周りに回転可能にしてナセル3に設けられるロータヘッド4とを有している。ロータヘッド4には、その回転軸線周りに放射状に3枚の風車翼5−1,5−2,5−3が取り付けられている。これにより、ロータヘッド4の回転軸線方向から風車翼5−1,5−2,5−3に当たった風の力が、ロータヘッド4を回転軸線周りに回転させる動力に変換され、この動力が発電機によって電気エネルギーに変換されるようになっている。
Memory),ROM(Read
Only Memory),HDD(Hard Disk Drive)などを備えており、CPUがHDD等に格納されている制御プログラムをRAM等に読み出して実行することにより、以下に説明する風車翼のピッチ角制御方法を実現させる。
上記θcomは、共通ピッチ角であり、各風車翼に対して共通の値となる。また、Δθ1,Δθ2,Δθ3は、各風車翼によって決定される調整量であり、例えば、各風車翼に対する荷重や、風速、風向等の風車の運転環境等に応じて決定される。
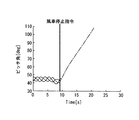
まず、風車停止指令が入力されると、ピッチ角制御装置10は、風車翼5−1,5−2,5−3の実ピッチ角を比較し、各風車翼のピッチ角が略一致しているか否かを判断する(図3のステップSA1)。具体的には、風車翼のピッチ角を2つずつ比較することにより、ピッチ角の差分を算出し、この差分の最大値が予め設定されている基準値未満であるか否かを判断する。
以下、風車翼5−1が代表風車翼として特定された場合を想定して説明する。
このとき、代表風車翼に対するピッチ角の差分が所定の値以下の風車翼については、調整量に最小調整量ΔθLOWを設定する。このようにすることで、代表風車翼のピッチ角を基準として、ピッチ角がある一定の範囲にある風車翼については、ピッチ角の差分が拡大するのを抑制することができる。
本実施形態では、例えば、最小調整量ΔθLOWは、1(°/s)、最大調整量ΔθHIGHは7(°/s)に設定されている。
そして、各風車翼5−1,5−2,5−3のピッチ角がフェザーリング位置(110°)に一致したところで(図3のステップSA6において「YES」)、本処理を終了する。
Claims (7)
- 複数の風車翼のピッチ角をそれぞれ独立に制御する独立ピッチ角制御を行う風車のピッチ角制御装置であって、
風車停止指令が入力された場合に、各前記風車翼のピッチ角を一致させた後、各前記風車翼のピッチ角をフェザーリング位置に移動させる風車のピッチ角制御装置。 - 風車停止指令が入力された場合に、複数の前記風車翼の中から、ピッチ角に基づいて代表風車翼を特定し、代表風車翼のピッチ角と他の風車翼のピッチ角とを一致させた後、前記風車翼の各々のピッチ角をフェザーリング位置に移動させる請求項1に記載の風車のピッチ角制御装置。
- ピッチ角がフェザーリング位置に最も近い風車翼を前記代表風車翼として特定する請求項2に記載の風車のピッチ角制御装置。
- 前記代表風車翼のピッチ角の移動速度を前記代表風車翼以外の風車翼のピッチ角の移動速度よりも遅く設定することで、前記風車翼以外の風車翼のピッチ角と前記代表風車翼のピッチ角とを一致させる請求項3に記載の風車のピッチ角制御装置。
- 前記風車翼のピッチ角が揃った後は、前記風車翼の各々を共通のピッチ角制御指令によって制御することにより、前記風車翼の各々をフェザーリング位置に移動させる請求項1から請求項4のいずれかに記載の風車のピッチ角制御装置。
- 請求項1から請求項5に記載の風車のピッチ角制御装置を備える風車。
- 複数の風車翼のピッチ角をそれぞれ独立に制御する独立ピッチ角制御を行う風車のピッチ角制御方法であって、
風車停止指令が入力された場合に、各前記風車翼のピッチ角を一致させた後、各前記風車翼のピッチ角をフェザーリング位置に移動させる風車のピッチ角制御方法。
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| PCT/JP2008/059048 WO2009139066A1 (ja) | 2008-05-16 | 2008-05-16 | 風車のピッチ角制御装置及びその方法 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JPWO2009139066A1 JPWO2009139066A1 (ja) | 2011-09-15 |
| JP4875750B2 true JP4875750B2 (ja) | 2012-02-15 |
Family
ID=41318448
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2009525839A Active JP4875750B2 (ja) | 2008-05-16 | 2008-05-16 | 風車のピッチ角制御装置及びその方法 |
Country Status (11)
| Country | Link |
|---|---|
| US (1) | US20110142630A1 (ja) |
| EP (1) | EP2290232B1 (ja) |
| JP (1) | JP4875750B2 (ja) |
| KR (1) | KR101115278B1 (ja) |
| CN (1) | CN101715515A (ja) |
| AU (1) | AU2008334195C1 (ja) |
| CA (1) | CA2670279C (ja) |
| DK (1) | DK2290232T3 (ja) |
| PT (1) | PT2290232E (ja) |
| TW (1) | TW200949069A (ja) |
| WO (1) | WO2009139066A1 (ja) |
Families Citing this family (17)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| AU2010201706A1 (en) * | 2010-02-08 | 2011-08-25 | Mitsubishi Heavy Industries, Ltd. | Wind turbine generator and blade pitch angle control method thereof |
| EP2841764B1 (en) | 2012-04-23 | 2018-04-11 | Vestas Wind Systems A/S | A method for controlling a wind turbine during shutdown |
| WO2013163795A1 (en) * | 2012-05-02 | 2013-11-07 | General Electric Company | System and method for stopping the operation of a wind turbine |
| CN103670920B (zh) * | 2012-09-06 | 2016-06-01 | 台达电子工业股份有限公司 | 风力变桨系统及风力变桨系统的桨叶零点备份与恢复方法 |
| ES2683210T3 (es) * | 2013-04-22 | 2018-09-25 | Vestas Wind Systems A/S | Método para controlar una turbina eólica durante la parada |
| EP3019743B1 (en) | 2013-07-08 | 2018-04-25 | Vestas Wind Systems A/S | A method for controlling a wind turbine during safety operation |
| KR101475274B1 (ko) * | 2013-07-19 | 2014-12-22 | 삼성중공업 주식회사 | 풍력발전기의 피치 제어 시스템 및 그 방법 |
| EP2915998B1 (de) * | 2014-03-05 | 2018-02-28 | Nordex Energy GmbH | Verfahren zum Betrieb einer Windenergieanlage |
| EP2937559A1 (de) | 2014-04-25 | 2015-10-28 | Moog Unna GmbH | Verfahren zur Notfahrt in die Fahnenstellung |
| CN105332855B (zh) | 2014-06-11 | 2019-06-28 | 通用电气公司 | 用于风力涡轮机的控制方法和控制系统 |
| CN105836085B (zh) * | 2016-03-28 | 2017-09-19 | 武汉船用机械有限责任公司 | 一种可调螺距螺旋桨的控制方法和装置 |
| CN106224161A (zh) * | 2016-07-19 | 2016-12-14 | 沈阳华创风能有限公司 | 带有控制器策略的独立变桨系统及变桨方法 |
| CN108443065A (zh) * | 2018-03-06 | 2018-08-24 | 浙江运达风电股份有限公司 | 一种大型风力发电机组独立变桨控制优化方法 |
| DE102018007997A1 (de) * | 2018-10-10 | 2020-04-16 | Senvion Gmbh | Verfahren und System zum Betreiben einer Windenergieanlage |
| DE102019117934A1 (de) * | 2019-07-03 | 2021-01-07 | aerodyn product + license GmbH | Verfahren zur aerodynamischen Leistungsregelung einer eine Mehrzahl von Rotorblättern aufweisenden Windenergieanlage |
| CN114829767A (zh) | 2019-11-21 | 2022-07-29 | 维斯塔斯风力系统集团公司 | 基于存储的桨距角信号停止风力涡轮机转子 |
| CN110844030A (zh) * | 2019-11-22 | 2020-02-28 | 中国船舶重工集团公司第七0四研究所 | 螺距反馈信号获取与处理方法 |
Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2003201952A (ja) * | 2002-01-07 | 2003-07-18 | Fuji Heavy Ind Ltd | 風車のピッチアライメント調整方法 |
| JP2006016984A (ja) * | 2004-06-30 | 2006-01-19 | Fuji Heavy Ind Ltd | 水平軸風車およびその待機方法 |
| JP2007064062A (ja) * | 2005-08-30 | 2007-03-15 | Fuji Heavy Ind Ltd | 水平軸風車 |
Family Cites Families (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US4462753A (en) * | 1982-06-22 | 1984-07-31 | United Technologies Corporation | Blade feathering system for wind turbines |
| DE10140793A1 (de) * | 2001-08-20 | 2003-03-06 | Gen Electric | Einrichtung zum Verstellen des Rotorblattes eines Rotors einer Windkraftanlage |
| EP2284391B1 (en) * | 2004-07-23 | 2018-02-07 | Vestas Wind Systems A/S | Method and control system of controlling a wind turbine blade during the stopping process of the rotor |
| EP1890034B1 (en) * | 2005-05-31 | 2016-08-17 | Hitachi, Ltd. | Horizontal axis windmill |
| DE102005034899A1 (de) * | 2005-07-26 | 2007-02-01 | Repower Systems Ag | Windenergieanlage mit Einzelpitcheinrichtungen |
| US7488155B2 (en) * | 2005-11-18 | 2009-02-10 | General Electric Company | Method and apparatus for wind turbine braking |
| US8240990B2 (en) * | 2007-12-06 | 2012-08-14 | General Electric Company | Apparatus and method for reducing asymmetric rotor loads in wind turbines during shutdown |
-
2008
- 2008-05-16 AU AU2008334195A patent/AU2008334195C1/en active Active
- 2008-05-16 CN CN200880002116A patent/CN101715515A/zh active Pending
- 2008-05-16 PT PT87528832T patent/PT2290232E/pt unknown
- 2008-05-16 KR KR1020097014149A patent/KR101115278B1/ko active IP Right Grant
- 2008-05-16 JP JP2009525839A patent/JP4875750B2/ja active Active
- 2008-05-16 EP EP08752883.2A patent/EP2290232B1/en active Active
- 2008-05-16 CA CA2670279A patent/CA2670279C/en active Active
- 2008-05-16 DK DK08752883.2T patent/DK2290232T3/en active
- 2008-05-16 US US12/521,014 patent/US20110142630A1/en not_active Abandoned
- 2008-05-16 WO PCT/JP2008/059048 patent/WO2009139066A1/ja active Application Filing
- 2008-06-02 TW TW097120510A patent/TW200949069A/zh unknown
Patent Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2003201952A (ja) * | 2002-01-07 | 2003-07-18 | Fuji Heavy Ind Ltd | 風車のピッチアライメント調整方法 |
| JP2006016984A (ja) * | 2004-06-30 | 2006-01-19 | Fuji Heavy Ind Ltd | 水平軸風車およびその待機方法 |
| JP2007064062A (ja) * | 2005-08-30 | 2007-03-15 | Fuji Heavy Ind Ltd | 水平軸風車 |
Also Published As
| Publication number | Publication date |
|---|---|
| CN101715515A (zh) | 2010-05-26 |
| KR20100007852A (ko) | 2010-01-22 |
| WO2009139066A1 (ja) | 2009-11-19 |
| TWI347402B (ja) | 2011-08-21 |
| AU2008334195A1 (en) | 2009-12-03 |
| EP2290232A4 (en) | 2013-11-27 |
| AU2008334195B2 (en) | 2011-11-10 |
| CA2670279C (en) | 2013-06-25 |
| EP2290232B1 (en) | 2015-08-05 |
| JPWO2009139066A1 (ja) | 2011-09-15 |
| AU2008334195C1 (en) | 2012-11-29 |
| US20110142630A1 (en) | 2011-06-16 |
| EP2290232A1 (en) | 2011-03-02 |
| DK2290232T3 (en) | 2015-10-26 |
| PT2290232E (pt) | 2015-11-12 |
| KR101115278B1 (ko) | 2012-03-09 |
| TW200949069A (en) | 2009-12-01 |
| CA2670279A1 (en) | 2009-11-16 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP4875750B2 (ja) | 風車のピッチ角制御装置及びその方法 | |
| US8317471B2 (en) | Method for preventing rotor overspeed of a wind turbine | |
| CA2840441C (en) | Method and apparatus for wind turbine noise reduction | |
| EP2712403B1 (en) | Power management system for yaw controlled wind turbines | |
| US11053916B2 (en) | Methods and systems for operating a wind turbine | |
| US20130045098A1 (en) | Cyclic Pitch Control System for Wind Turbine Blades | |
| WO2018157897A1 (en) | Yaw system monitor for a multi-rotor wind turbine system | |
| CN111788383B (zh) | 基于约束的多转子风力涡轮机的推力平衡控制 | |
| WO2013057836A1 (ja) | 風力発電装置及び風力発電装置のヨー旋回制御方法 | |
| EP2754890B1 (en) | Method and Apparatus for Controlling an Operational Parameter of a Wind Turbine | |
| US20120133134A1 (en) | Method and apparatus for damping vibrations in a wind energy system | |
| JPWO2012114487A1 (ja) | 風力発電装置の制御装置、風力発電装置、及び風力発電装置の制御方法 | |
| US20140286776A1 (en) | Blade Pitch System for a Wind Turbine Generator and Method of Operating the Same | |
| US10837424B2 (en) | Method for operating a wind turbine and a wind turbine system | |
| JP6370818B2 (ja) | 風車の制御装置、風車、ロータターニング用プログラム、及び風車のロータターニング方法 | |
| JP2016008556A (ja) | 水平軸型風車及びその待機方法 | |
| KR102042259B1 (ko) | 풍력발전시스템 및 그것의 구동 정지 방법 | |
| JP6462388B2 (ja) | 風力発電装置 | |
| EP2607688B1 (en) | Method for controlling a wind turbine | |
| US11549488B2 (en) | Method and controller for operating a wind turbine | |
| JP2007247577A (ja) | 風車装置およびそれを用いた風力発電装置 | |
| JP4494813B2 (ja) | 水平軸風車及びその制御方法 | |
| KR20130023524A (ko) | 풍력 발전기의 블레이드 피치 제어 시스템 | |
| EP3699421B1 (en) | Method of dynamically adjusting a rate of change of a rotor speed set point during wind turbine shutdown | |
| KR20130000285A (ko) | 풍력 발전 장치 및 그 제어 방법 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20111101 |
|
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20111125 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20141202 Year of fee payment: 3 |
|
| R151 | Written notification of patent or utility model registration |
Ref document number: 4875750 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R151 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20141202 Year of fee payment: 3 |
|
| S111 | Request for change of ownership or part of ownership |
Free format text: JAPANESE INTERMEDIATE CODE: R313114 |
|
| R350 | Written notification of registration of transfer |
Free format text: JAPANESE INTERMEDIATE CODE: R350 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| S111 | Request for change of ownership or part of ownership |
Free format text: JAPANESE INTERMEDIATE CODE: R313117 |
|
| R350 | Written notification of registration of transfer |
Free format text: JAPANESE INTERMEDIATE CODE: R350 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |