JP4792807B2 - モータ、およびこれを備えたウエハ搬送ロボット - Google Patents
モータ、およびこれを備えたウエハ搬送ロボット Download PDFInfo
- Publication number
- JP4792807B2 JP4792807B2 JP2005135305A JP2005135305A JP4792807B2 JP 4792807 B2 JP4792807 B2 JP 4792807B2 JP 2005135305 A JP2005135305 A JP 2005135305A JP 2005135305 A JP2005135305 A JP 2005135305A JP 4792807 B2 JP4792807 B2 JP 4792807B2
- Authority
- JP
- Japan
- Prior art keywords
- magnetic
- permanent magnet
- armature core
- motor
- adapter
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
Images





Landscapes
- Manipulator (AREA)
- Container, Conveyance, Adherence, Positioning, Of Wafer (AREA)
- Permanent Magnet Type Synchronous Machine (AREA)
Description
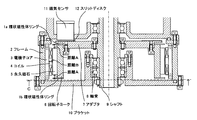
図において、2はフレーム、3は電機子コア、4はコイル、5は永久磁石、6は回転子ヨーク、7はアダプタ、8は軸受、9はシャフト、10はブラケット、11は磁気センサ、12はスリットディスクである。
回転子側には磁性体の回転子ヨーク6の外周面に界磁用の永久磁石5が隣り合う磁極が互いに異極となるように円周方向に固着されており、上記回転子ヨーク6はアダプタ7によってシャフト9に固着されており、前記シャフト9は軸受8により固定子側のブラケット10に対して回転自在に支承されている。
また、固定子側には電機子コア3の内周面にコイル4が通電時の電気的位相によって決定された間隔及び相順をもって円周方向に配置されており、前記コイル4の内周面と前記永久磁石5の表面との間には所定のラジアル方向のクリアランスが存在する。
更に、前記電機子コア3はフレーム2に嵌合されており、前記フレーム2は前記ブラケット10に連結されている。
かかるモータは、上記コイル4への通電によって発生する起磁力が連続的に変化することで作られる回転磁界と回転子側の界磁永久磁石5による磁束との電磁作用により、回転子ヨーク6が回転するようになっている。
また、固定子と回転子との相対的な速度及び位置を検出する手段として、固定子側に磁気センサ11が配置されるとともに、回転子側に前記磁気センサ11と所定のギャップを介して対向する位置に前記ギャップ及び回転方向と垂直なスリットが回転方向に所定の等間隔で設けられている磁性体からなるスリットディスク12が配置される。
前記スリットディスク12の回転に伴なう磁気抵抗のスリットピッチ毎の周期的な変化を前記磁気センサ11で検出し、図示しない信号処理回路を介してスリットピッチに応じた検出信号が出力されるようになっている。
上述のようなモータは、前記シャフト9の軸端に図示しないアームが取り付けられ、前記シャフト9の回転によりアームが旋回動作する。
また、上述のようなモータが軸方向に2段構成をとると共に、それぞれのシャフトが同心軸構造とし、2軸のアームを相互に回転することで伸縮・旋回ができるようになったものもある。(例えば、特許文献1参照)。
この軸方向の両側への漏洩磁束は微小ではあるが、磁気的に遮蔽されていないので、磁束が狭い範囲で閉じにくく、モータ外部の広範囲にまで漏洩磁束が広がるため、その結果、磁気センサ11が誤動作を起こしたり、磁場の影響が問題となる装置環境(電子ビーム、プラズマ等に近い環境)で使用される場合に悪影響を及ぼすという問題があった。
本発明はこのような問題点に鑑みてなされたものであり、磁気センサを誤動作させることが無く、磁場の影響が問題となる装置環境においても問題なく使用することができるように、永久磁石からの漏洩磁束がモータ外部の広範囲にまで広がることを防止することができるウエハ搬送ロボットにおけるモータを提供することを目的とする。
請求項1記載の発明は、モータに係り、
円板状のアダプタと、
前記円板状のアダプタの中心を貫通して前記アダプタを固着しているシャフトと、
前記アダプタの内側面に固定された円筒状をした磁性体の回転子ヨークと、
前記円筒状の回転子ヨークの円筒外周面にそれぞれ隣り合う磁極が互いに異極となるように取付けられた複数の界磁用の永久磁石と、
前記シャフトを軸受を介して回転自在に支承している固定子側のブラケットと、
前記ブラケットの反軸受側の端部に連結される円筒状のフレームと、
前記円筒状のフレームの円筒内周面に嵌合される円筒状をした電機子コアと、
前記電機子コアの円筒内周面に、通電時の電気的位相によって決定された間隔及び相順をもって円周方向に配置されると共に前記永久磁石の表面との間にラジアル方向のクリアランスを設けて配置される複数のコイルと、を備えたモータにおいて、
前記永久磁石の長さ方向の両側から前記永久磁石を挟むように前記永久磁石と所定の間隔をあけて前記回転子ヨークに機械的かつ磁気的に結合されることにより前記電機子コアの両端部分を通る磁束を通過させて閉ループを形成させる2枚の環状磁性体リングと、
前記アダプタの前記回転子ヨーク固定面の反対面で前記環状磁性体リングの近傍に配置された磁性体のスリットディスクと、
前記スリットディスクの回転に伴う磁気抵抗の変化を検出する磁気センサと、をさらに備えたことを特徴としている。
請求項2記載の発明は、請求項1記載のモータにおいて、前記電機子コア3の軸方向の長さを、前記2枚の環状磁性体リング1a及び1b間の距離の長さとしたことを特徴としている。
請求項3記載の発明は、請求項1又は2記載のモータにおいて、前記環状磁性体リング1a、1bがそれぞれ前記永久磁石5の前記環状磁性体リング1a、1b側の端面から環状磁性体リング1a、1bまでの距離Aが、前記電機子コア3の内周面と前記永久磁石5の表面との間の距離Bと等しくなる位置に設けられていることを特徴としている。
請求項4記載の発明は、請求項1〜3のいずれか1項記載のモータにおいて、前記環状磁性体リング1a、1bの外周端部が前記永久磁石5の表面の延長面まで延びていることを特徴としている。
前記円板状のアダプタの中心を貫通して前記アダプタを固着しているシャフトと、
前記アダプタの内側面に固定された円板状をした磁性体の回転子ヨークと、
前記円筒状の回転子ヨークの表面にそれぞれ隣り合う磁極が互いに異極となるように取付けられた複数の界磁用の永久磁石と、
前記シャフトを軸受を介して回転自在に支承している固定子側のブラケットと、
前記ブラケットの内側に設けられた円板状の電機子コアと、
前記電機子コアの表面に、通電時の電気的位相によって決定された間隔及び相順をもって円周方向に配置されると共に前記永久磁石の表面との間に軸方向のクリアランスを設けて配置される複数のコイルと、を備えたモータにおいて、
前記永久磁石の長さ方向の両側から前記永久磁石を挟むように前記永久磁石と所定の間隔をあけて前記回転子ヨークに機械的かつ磁気的に結合されることにより前記電機子コアの両端部分を通る磁束を通過させて閉ループを形成させる内径のそれぞれ異なる2個の管状磁性体リングと、
前記アダプタの前記回転子ヨーク固定面の反対面で前記管状磁性体リングの近傍に配置された磁性体のスリットディスクと、
前記スリットディスクの回転に伴う磁気抵抗の変化を検出する磁気センサと、をさらに備えたことを特徴としている。
請求項6記載の発明は、請求項5項記載のモータにおいて、前記電機子コア3の半径方向の長さを、前記2個の管状磁性体リング1c、1d間の距離の長さとしたことを特徴としている。
請求項7記載の発明は、請求項5又は6項記載のモータにおいて、前記永久磁石5の前記管状磁性体リング1c、1d側の端面から前記管状磁性体リング1c、1dまでの距離Cが、前記電機子コア3と前記永久磁石5の対向面間の距離Dと等しくなる位置に、前記管状磁性体リング1c、1dがそれぞれ設けられていることを特徴としている。
請求項8記載の発明は、請求項5〜7のいずれか1項記載のモータにおいて、前記管状磁性体リング1c、1dの管先端部が前記永久磁石5の前記コイル4表面の延長面まで延びていることを特徴としている。
請求項9記載の発明は、ウエハ搬送ロボットに係り、請求項1〜8のいずれか1項記載のモータを用いたことを特徴としている。
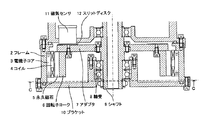
図において1は環状(中空円板状)磁性体リング、2は円筒状のフレーム、3は円筒状の電機子コア、4はコイル、5は永久磁石、6は円筒状の回転子ヨーク、7はアダプタ、8は軸受、9はシャフト、10はブラケット、11は磁気センサ、12はスリットディスクである。
本実施例が特許文献1と異なる部分は、従来のモータに、永久磁石5の軸方向の両側に配置されるとともに回転子ヨーク6とボルト締めや接着などの方法で磁気的に結合された環状磁性体リング1a、1bを追加した部分である。
さらに、前記環状磁性体リング1a、1bは、それぞれ前記永久磁石5の軸方向端面から磁性体リング1a、1bまでの距離Aが前記電機子コア3の内周面と前記永久磁石5の表面との間の距離Bと等しくなる位置に設けられている。
また、前記磁性体リング1a、1bの外周面は前記永久磁石5の表面と同じ面となるような寸法にしている。すなわち、環状磁性体リング1a、1bの外周端部は永久磁石5の表面の延長面まで延びている。
以上の構成により、主磁束を不必要に拾うことが無く、漏洩磁束のみが環状磁性体リング1a、1bを通りやすくなる。
これにより、磁気センサ11を永久磁石5や回転子ヨーク6に接近させても漏洩磁束の影響を受けることが無くなる。
更に、漏洩磁束がモータ外部の広範囲にまで及ばなくなるので、磁場の影響が問題となる装置環境で使用される場合においても悪影響を及ぼすことが無くなる。
図5(a)において、1は管状(軸方向に短いパイプ状)磁性体リング、2はフレーム、3は円板状の電機子コア、4はコイル、5は永久磁石、6は円板状の回転子ヨーク、7はアダプタ、8は軸受、9はシャフト、10はブラケット、11は磁気センサ、12はスリットディスクである。
本実施例が第1の実施例と異なる部分は、第1の実施例の環状磁性体リング1a、1bに替えて管状磁性体リング1c、1dを永久磁石5の半径方向の両側に配置したことである。
そして、電機子コア3の半径方向の長さを前記管状磁性体リング1c及び1dと対向する位置までの長さとした部分である。すなわち、電機子コア3の半径方向の長さを、前記2個の管状磁性体リング1c、1d間の距離の長さとしたことである。
さらに、前記管状磁性体リング1c、1dは、それぞれ前記永久磁石5の半径方向端面から管状磁性体リング1c、1dまでの距離Cが前記電機子コア3と前記永久磁石5の対向面間の距離Dと等しくなる位置に設けられている。
また、前記管状磁性体リング1c、1dの先端面は前記永久磁石5の表面と同じ面となるような寸法にしている。すなわち、管状磁性体リング1c、1dの管先端部が永久磁石5の表面の延長面まで延びている。
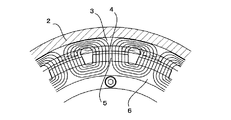
以上の構成により、従来例では磁束の一部が図9に示すように軸方向の両側に漏洩していたが、本発明によれば、図5(b)に示すように、本発明により設けられた管状磁性体リング1c、1d及び電機子コア3の管状磁性体リング1c、1dと対向する両端部分を通る閉ループを形成するので、磁束が狭い範囲で閉じるようになる。
これにより、磁気センサ11を永久磁石5や回転子ヨーク6に接近させても漏洩磁束の影響を受けることが無くなる。
更に、漏洩磁束がモータ外部の広範囲にまで及ばなくなるので、磁場の影響が問題となる装置環境で使用される場合においても悪影響を及ぼすことが無くなる。
また、本実施例において回転子、固定子及びセンサ部の取付け位置、取付け方法について一例を示したが、本実施例で示した取付け方法、取付け位置に限定されることはなく、他の取付け方法、取付け位置でも構わない。
また、本実施例においてシャフト9は中空構造となっているが、中実構造でも構わない。
また、本実施例において永久磁石について隣り合う磁極が互いに異極となる複数の磁石を用いた例を示したが、1つの磁石に多極着磁したものを用いても構わない。
また、ウエハ搬送ロボットにおけるモータに限らず、一般的な回転子に界磁極を持った回転型モータにも微弱な磁界の変動が許されないそれの用途に適用できる。
1c、1d 管状磁性体リング
2 フレーム
3 電機子コア
4 コイル
5 永久磁石
6 回転子ヨーク
7 アダプタ
8 軸受
9 シャフト
10 ブラケット
11 磁気センサ
12 スリットディスク
距離A 永久磁石5の軸方向端面から磁性体リング1a、1bまでの距離
距離B 電機子コア3の内周面と永久磁石5の表面との間の距離
距離C 永久磁石5の半径方向端面から管状磁性体リング1c、1dまでの距離
距離D 電機子コア3と永久磁石5の対向面間の距離
Claims (9)
- 円板状のアダプタと、
前記円板状のアダプタの中心を貫通して前記アダプタを固着しているシャフトと、
前記アダプタの内側面に固定された円筒状をした磁性体の回転子ヨークと、
前記円筒状の回転子ヨークの円筒外周面にそれぞれ隣り合う磁極が互いに異極となるように取付けられた複数の界磁用の永久磁石と、
前記シャフトを軸受を介して回転自在に支承している固定子側のブラケットと、
前記ブラケットの反軸受側の端部に連結される円筒状のフレームと、
前記円筒状のフレームの円筒内周面に嵌合される円筒状をした電機子コアと、
前記電機子コアの円筒内周面に、通電時の電気的位相によって決定された間隔及び相順をもって円周方向に配置されると共に前記永久磁石の表面との間にラジアル方向のクリアランスを設けて配置される複数のコイルと、を備えたモータにおいて、
前記永久磁石の長さ方向の両側から前記永久磁石を挟むように前記永久磁石と所定の間隔をあけて前記回転子ヨークに機械的かつ磁気的に結合されることにより前記電機子コアの両端部分を通る磁束を通過させて閉ループを形成させる2枚の環状磁性体リングと、
前記アダプタの前記回転子ヨーク固定面の反対面で前記環状磁性体リングの近傍に配置された磁性体のスリットディスクと、
前記スリットディスクの回転に伴う磁気抵抗の変化を検出する磁気センサと、をさらに備えたことを特徴とするモータ。 - 前記電機子コアの軸方向の長さを、前記2枚の環状磁性体リング間の距離の長さとしたことを特徴とする請求項1記載のモータ。
- 前記環状磁性体リングはそれぞれ前記永久磁石の前記環状磁性体リング側の端面から環状磁性体リングまでの距離が、前記電機子コアの内周面と前記永久磁石の表面との間の距離と等しくなる位置に設けられていることを特徴とする請求項1又は2記載のモータ。
- 前記環状磁性体リングの外周端部が前記永久磁石の表面の延長面まで延びていることを特徴とする請求項1〜3のいずれか1項記載のモータ。
- 円板状のアダプタと、
前記円板状のアダプタの中心を貫通して前記アダプタを固着しているシャフトと、
前記アダプタの内側面に固定された円板状をした磁性体の回転子ヨークと、
前記円筒状の回転子ヨークの表面にそれぞれ隣り合う磁極が互いに異極となるように取付けられた複数の界磁用の永久磁石と、
前記シャフトを軸受を介して回転自在に支承している固定子側のブラケットと、
前記ブラケットの内側に設けられた円板状の電機子コアと、
前記電機子コアの表面に、通電時の電気的位相によって決定された間隔及び相順をもって円周方向に配置されると共に前記永久磁石の表面との間に軸方向のクリアランスを設けて配置される複数のコイルと、を備えたモータにおいて、
前記永久磁石の長さ方向の両側から前記永久磁石を挟むように前記永久磁石と所定の間隔をあけて前記回転子ヨークに機械的かつ磁気的に結合されることにより前記電機子コアの両端部分を通る磁束を通過させて閉ループを形成させる内径のそれぞれ異なる2個の管状磁性体リングと、
前記アダプタの前記回転子ヨーク固定面の反対面で前記管状磁性体リングの近傍に配置された磁性体のスリットディスクと、
前記スリットディスクの回転に伴う磁気抵抗の変化を検出する磁気センサと、をさらに備えたことを特徴とするモータ。 - 前記電機子コアの半径方向の長さを、前記2個の管状磁性体リング間の距離の長さとしたことを特徴とする請求項5記載のモータ。
- 前記管状磁性体リングは、それぞれ前記永久磁石の前記管状磁性体リング側の端面から前記管状磁性体リングまでの距離が、前記電機子コアと前記永久磁石の対向面間の距離と等しくなる位置に設けられていることを特徴とする請求項5又は6記載のモータ。
- 前記管状磁性体リングの管先端部が前記永久磁石の前記コイル表面の延長面まで延びていることを特徴とする請求項5〜7のいずれか1項記載のモータ。
- 請求項1〜8のいずれか1項記載のモータを駆動機構として用いたことを特徴とするウエハ搬送ロボット。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2005135305A JP4792807B2 (ja) | 2005-05-06 | 2005-05-06 | モータ、およびこれを備えたウエハ搬送ロボット |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2005135305A JP4792807B2 (ja) | 2005-05-06 | 2005-05-06 | モータ、およびこれを備えたウエハ搬送ロボット |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2006314157A JP2006314157A (ja) | 2006-11-16 |
| JP4792807B2 true JP4792807B2 (ja) | 2011-10-12 |
Family
ID=37535416
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2005135305A Expired - Fee Related JP4792807B2 (ja) | 2005-05-06 | 2005-05-06 | モータ、およびこれを備えたウエハ搬送ロボット |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP4792807B2 (ja) |
Families Citing this family (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN115424964A (zh) * | 2015-07-13 | 2022-12-02 | 博鲁可斯自动化美国有限责任公司 | 基底传输设备 |
Family Cites Families (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP3551036B2 (ja) * | 1997-09-12 | 2004-08-04 | 松下電器産業株式会社 | 動圧流体軸受を備えたスピンドル装置 |
| JP4600858B2 (ja) * | 2000-12-20 | 2010-12-22 | 株式会社安川電機 | リニアモータ |
| JP2004254477A (ja) * | 2003-02-21 | 2004-09-09 | Sayama Precision Ind Co | モータ |
-
2005
- 2005-05-06 JP JP2005135305A patent/JP4792807B2/ja not_active Expired - Fee Related
Also Published As
| Publication number | Publication date |
|---|---|
| JP2006314157A (ja) | 2006-11-16 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US6268674B1 (en) | Magnetic bearing apparatus | |
| KR101475555B1 (ko) | 액추에이터 | |
| JP4964303B2 (ja) | モータの回転位置検出装置 | |
| EP2397821B1 (en) | Method of magnetizing magnetic encoder and magnetizing apparatus | |
| JP4427938B2 (ja) | スラスト磁気軸受装置 | |
| US11204038B2 (en) | Vacuum pump, and magnetic bearing device and annular electromagnet used in vacuum pump | |
| JP4204294B2 (ja) | 回転角検出装置 | |
| CN110731041B (zh) | 具有可转动的磁杆的永磁激励式电动机 | |
| JP6244424B2 (ja) | 真空ポンプ又は回転ユニットの漂遊ベクトル磁場の減少の為の方法並びに真空ポンプ及び回転ユニット | |
| JP2020129951A (ja) | 電動機およびその製造方法 | |
| JP4792807B2 (ja) | モータ、およびこれを備えたウエハ搬送ロボット | |
| JP6054011B1 (ja) | 磁気センサ及び回転装置 | |
| US6362549B1 (en) | Magnetic bearing device | |
| JP2012016180A (ja) | アクチュエータ | |
| JP2005076792A (ja) | 磁気軸受装置 | |
| CN113632350B (zh) | 转子和马达 | |
| US7719152B2 (en) | Magnetic levitation actuator | |
| JP2011182569A (ja) | インナーロータ型モータ | |
| JP4073758B2 (ja) | 車両用回転電機 | |
| JP5426935B2 (ja) | リニアアクチュエータ | |
| JP2010141991A (ja) | 回転モーター | |
| JP2005210808A (ja) | 永久磁石埋め込み型同期機 | |
| JP3096072B2 (ja) | 着磁ヨーク装置 | |
| JPH07143717A (ja) | 超高速スピンドルモータ | |
| JP2007110864A (ja) | モータ |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| RD04 | Notification of resignation of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7424 Effective date: 20071127 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20080411 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20110412 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20110606 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20110628 |
|
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20110711 |
|
| R150 | Certificate of patent (=grant) or registration of utility model |
Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| FPAY | Renewal fee payment (prs date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20140805 Year of fee payment: 3 |
|
| LAPS | Cancellation because of no payment of annual fees |