JP4709268B2 - 車両制御用マルチコアシステムまたは内燃機関の制御装置 - Google Patents
車両制御用マルチコアシステムまたは内燃機関の制御装置 Download PDFInfo
- Publication number
- JP4709268B2 JP4709268B2 JP2008303369A JP2008303369A JP4709268B2 JP 4709268 B2 JP4709268 B2 JP 4709268B2 JP 2008303369 A JP2008303369 A JP 2008303369A JP 2008303369 A JP2008303369 A JP 2008303369A JP 4709268 B2 JP4709268 B2 JP 4709268B2
- Authority
- JP
- Japan
- Prior art keywords
- core
- cores
- failure
- arithmetic processing
- vehicle control
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
Images



























Classifications
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06F—ELECTRIC DIGITAL DATA PROCESSING
- G06F11/00—Error detection; Error correction; Monitoring
- G06F11/07—Responding to the occurrence of a fault, e.g. fault tolerance
- G06F11/16—Error detection or correction of the data by redundancy in hardware
- G06F11/18—Error detection or correction of the data by redundancy in hardware using passive fault-masking of the redundant circuits
- G06F11/187—Voting techniques
- G06F11/188—Voting techniques where exact match is not required
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06F—ELECTRIC DIGITAL DATA PROCESSING
- G06F11/00—Error detection; Error correction; Monitoring
- G06F11/07—Responding to the occurrence of a fault, e.g. fault tolerance
- G06F11/16—Error detection or correction of the data by redundancy in hardware
- G06F11/1695—Error detection or correction of the data by redundancy in hardware which are operating with time diversity
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06F—ELECTRIC DIGITAL DATA PROCESSING
- G06F11/00—Error detection; Error correction; Monitoring
- G06F11/07—Responding to the occurrence of a fault, e.g. fault tolerance
- G06F11/16—Error detection or correction of the data by redundancy in hardware
- G06F11/1629—Error detection by comparing the output of redundant processing systems
- G06F11/1637—Error detection by comparing the output of redundant processing systems using additional compare functionality in one or some but not all of the redundant processing components
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06F—ELECTRIC DIGITAL DATA PROCESSING
- G06F11/00—Error detection; Error correction; Monitoring
- G06F11/07—Responding to the occurrence of a fault, e.g. fault tolerance
- G06F11/16—Error detection or correction of the data by redundancy in hardware
- G06F11/1629—Error detection by comparing the output of redundant processing systems
- G06F11/165—Error detection by comparing the output of redundant processing systems with continued operation after detection of the error
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06F—ELECTRIC DIGITAL DATA PROCESSING
- G06F11/00—Error detection; Error correction; Monitoring
- G06F11/07—Responding to the occurrence of a fault, e.g. fault tolerance
- G06F11/16—Error detection or correction of the data by redundancy in hardware
- G06F11/18—Error detection or correction of the data by redundancy in hardware using passive fault-masking of the redundant circuits
- G06F11/181—Eliminating the failing redundant component
Description
Ti=K×Qa/Ne×Coef+Ts
Ti:燃料噴射パルス幅(ms)
K:比例定数
Qa:吸入空気量(kg/s)
Ne:エンジン回転数(r/min)
Coef:空燃比補正係数
Ts:無効噴射パルス幅(ms)
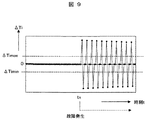
ΔTimin=−α×|移動平均値|
〔数3〕
ΔTimax=+α×|移動平均値|
R=W1×C1+W2×C2+・・・+Wn×Cn
R:集計値
Wn:n番目のコアに対する重み付け(0〜1)
Cn:n番目のコアの判定結果値。正常判定時=0,故障判定時=1
ΔIAMINn=−αian×|IAn|
〔数6〕
ΔIAMAXn=+αian×|IAn|
ΔIAMINn:n番目の入力値の判定用範囲の下限値
ΔIAMAXn:n番目の入力値の判定用範囲の上限値
αian:n番目の入力値の判定用範囲算出係数
IAn:n番目の入力値の移動平均値
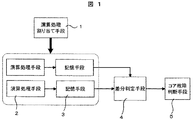
2 演算処理手段
3 記憶手段
4 差分判定手段
5 コア故障判断手段
6 制御コントロールユニット(C/U)
7 マイクロコンピュータ(CPU)
8 読み取り専用記憶装置(ROM)
9 読み書き可能記憶装置(RAM)
10 車両
11 車両に備えられたセンサ
12 車両に備えられたアクチュエータ
13 入出力装置(I/O)
14〜17 コアA〜D
18 データバス
19 I/Oポート
20 データ読み込みポート
21 データ書き込みポート
22 車両の制御に関わる処理関数A
23 故障判定処理
Claims (21)
- 複数のコアを用いて車両に搭載された機器を制御するための車両制御用マルチコアシステムであって、
連続的に変化する入力値を取得し、前記機器の制御に必要な出力値を演算する演算処理手段を備え、
前記演算処理手段が前記複数のコア中の特定のコアにおいて特定のタイミングで演算処理を行った出力値と、
前記特定のコアとは異なる、前記複数のコア中の他のコアにおいて、
前記演算処理手段が前記特定のタイミングとは異なるタイミングで演算処理を行った出力値と、
の比較を行い、前記特定のコアに故障が生じていると判断するコア故障判断手段を備えることを特徴とする車両制御用マルチコアシステム。 - 前記コア故障判断手段は、
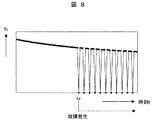
前記演算処理手段の演算処理が実行されるコアが切り替わることによって、
前記演算処理手段の出力値の連続性が失われたときに、
前記特定のコアに故障が生じていると判断することを特徴とする請求項1に記載の車両制御用マルチコアシステム。 - 前記コア故障判断手段は、連続した演算周期での演算処理手段の出力値を比較することを特徴とする請求項1または2いずれかに記載の車両制御用マルチコアシステム。
- 前記車両制御用マルチコアシステムは、実行するコアとタイミングとがそれぞれ異なる出力値の差分を求め、前記差分が所定の範囲内にあるかどうかを判定する差分判定手段を備え、前記コア故障判断手段は前記差分判定手段の判定結果によって、
前記特定のコアに故障が生じていると判断することを特徴とする請求項1から3いずれかに記載の車両制御用マルチコアシステム。 - 前記車両制御用マルチコアシステムは、少なくとも2回以上の演算処理を行った出力値の移動平均値を計算し、前記移動平均値と、前記特定のタイミングにおいて前記演算処理手段が演算処理を行った出力値との差分を求め、前記差分が所定の範囲内にあるかどうかを判定する差分判定手段を備え、前記差分判定手段の判定結果によって前記特定のコアに故障が生じていると判断することを特徴とする請求項1から3いずれかに記載の車両制御用マルチコアシステム。
- 前記差分判定手段の判定に用いる所定の範囲は、少なくとも2回以上の演算処理を行った出力値の移動平均値に基づいて求めることを特徴とする請求項4から5いずれかに記載の車両制御用マルチコアシステム。
- 前記コア故障判断手段は、前記差分判定手段による前記特定のコアの判定結果が所定の範囲内でないときに故障カウンタを増加し、前記故障カウンタが所定回数を超えたときに前記特定のコアに故障が生じていると判断することを特徴とする請求項4から6いずれかに記載の車両制御用マルチコアシステム。
- 前記車両制御用マルチコアシステムは、前記演算処理手段を分割し、実行されるタイミングによって演算処理が実行されるコアが切り替わるように前記複数のコアに割り当てる演算処理割り当て手段を備え、
前記演算処理割り当て手段は、前記コア故障判断手段によって前記特定のコアに故障が生じていると判断された場合、前記特定のコアを割り当ての対象から除外して再度割り当てることを特徴とする請求項1から7のいずれかに記載の車両制御用マルチコアシステム。 - 前記コア故障判断手段は、前回の演算周期において前記コア故障判断手段によって正常であると判断されたコアで行うことを特徴とする請求項1から8いずれかに記載の車両制御用マルチコアシステム。
- 前記差分判定手段は、前回の演算周期において前記コア故障判断手段によって正常であると判断されたコアで行うことを特徴とする請求項4から9のいずれかに記載の車両制御用マルチコアシステム。
- 前記差分判定手段および前記コア故障判断手段は、少なくとも3つ以上の奇数のコアで重複して実施され、前記実施の結果の多数決によってコア故障判断を行うことを特徴とする請求項4から10のいずれかに記載の車両制御用マルチコアシステム。
- 前記差分判定手段および前記コア故障判断手段は、少なくとも2つ以上のコアで重複して実施し、前記少なくとも2つ以上のコア中の各コアそれぞれの判定結果を重み付けして集計し、前記集計の結果を用いてコア故障判断を行うことを特徴とする請求項4から10のいずれかに記載の車両制御用マルチコアシステム。
- 前記差分判定手段および前記コア故障判断手段は、少なくとも3つ以上のコアで重複して実施し、前記少なくとも3つ以上のコア中の1つのコアだけが前記特定のコアは故障であると判定し、前記少なくとも3つ以上のコア中の他のコアが前記特定のコアは正常であると判定した場合は、故障であると判定したコアに故障が生じていると判断し、前記少なくとも3つ以上のコア中の1つのコアだけが前記特定のコアは正常であると判定し、前記少なくとも3つ以上のコア中の他のコアが前記特定のコアは故障であると判定した場合は、正常であると判定したコアと前記特定のコアとの両方に故障が生じていると判断することを特徴とする請求項4から12記載の車両制御用マルチコアシステム。
- 前記車両の運転モードを少なくとも2つ以上規定する運転モード切替手段を持ち、前記運転モード切替手段によって前記運転モードが変更されたときは、前記コア故障判断を所定時間行わないことを特徴とする請求項1から13いずれかに記載の車両制御用マルチコアシステム。
- 前記車両制御用マルチコアシステムは、前記演算処理手段に使用する少なくとも1つ以上の入力値を検出し、前記コア故障判断手段は、前記入力値のいずれかまたは複数に関して、特定の入力タイミングの入力値と、前記特定の入力タイミングより前の入力タイミングの入力値との差分が所定の範囲内にあるかどうかを判定する入力値差分判定手段を備え、前記入力値差分判定手段によって差分が所定の範囲外であると判定されたときには、前記コア故障判断を所定時間行わないことを特徴とする請求項1から14のいずれかに記載の車両制御用マルチコアシステム。
- 前記入力値差分判定手段は、少なくとも2回以上のタイミングにおいて得られた入力値の移動平均値を計算し、前記入力値の移動平均値と、前記特定の入力タイミングにおける入力値との差分が所定の範囲内にあるかどうかを判定することを特徴とする請求項15に記載の車両制御用マルチコアシステム。
- 前記入力値差分判定手段の判定に用いる所定の範囲は、前記入力値の移動平均値に基づいて求めることを特徴とする請求項16に記載の車両制御用マルチコアシステム。
- 前記演算処理手段が前記複数のコアに割り当てられて、
演算処理を行うタイミングは、
前記機器の動作に同期して決定することを特徴とする請求項1から17いずれかに記載の車両制御用マルチコアシステム。 - 内燃機関を制御するための複数のコアを備えた内燃機関の制御装置であって、連続的に変化する入力値を取得し、前記内燃機関の制御に必要な出力値を演算する演算処理手段を備え、前記演算処理手段が前記複数のコア中の特定のコアにおいて特定のタイミングで演算処理を行った出力値と、
前記特定のコアとは異なる、前記複数のコア中の他のコアにおいて、
前記演算処理手段が前記特定のタイミングとは異なるタイミングで演算処理を行った出力値と、の比較を行い、前記特定のコアに故障が生じていると判断するコア故障判断手段を備えることを特徴とする内燃機関の制御装置。 - 前記コア故障判断手段は、
前記演算処理手段の演算処理が実行されるコアが切り替わることによって、
前記演算処理手段の出力値の連続性が失われたときに、
前記特定のコアに故障が生じていると判断する
ことを特徴とする請求項19に記載の内燃機関の制御装置。 - 前記演算処理手段を分割し、実行されるタイミングによって
演算処理が実行されるコアが切り替わるように前記複数のコアに割り当てる、
演算処理割り当て手段を備え、
前記演算処理割り当て手段は、
前記演算処理手段を前記複数のコアに割り当てるタイミングを、
前記内燃機関の動作に同期して決定することを特徴とする請求項19または20いずれかに記載の内燃機関の制御装置。
Priority Applications (4)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2008303369A JP4709268B2 (ja) | 2008-11-28 | 2008-11-28 | 車両制御用マルチコアシステムまたは内燃機関の制御装置 |
| US12/625,266 US8417990B2 (en) | 2008-11-28 | 2009-11-24 | Multi-core processing system for vehicle control or an internal combustion engine controller |
| EP09177078A EP2192489B1 (en) | 2008-11-28 | 2009-11-25 | Multi-core processing system for vehicle control or an internal combustion engine controller |
| AT09177078T ATE545086T1 (de) | 2008-11-28 | 2009-11-25 | Multi-core-verarbeitungssystem zur fahrzeugsteuerung oder eine verbrennungsmotorsteuerung |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2008303369A JP4709268B2 (ja) | 2008-11-28 | 2008-11-28 | 車両制御用マルチコアシステムまたは内燃機関の制御装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2010126012A JP2010126012A (ja) | 2010-06-10 |
| JP4709268B2 true JP4709268B2 (ja) | 2011-06-22 |
Family
ID=41718918
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2008303369A Expired - Fee Related JP4709268B2 (ja) | 2008-11-28 | 2008-11-28 | 車両制御用マルチコアシステムまたは内燃機関の制御装置 |
Country Status (4)
| Country | Link |
|---|---|
| US (1) | US8417990B2 (ja) |
| EP (1) | EP2192489B1 (ja) |
| JP (1) | JP4709268B2 (ja) |
| AT (1) | ATE545086T1 (ja) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US10430301B2 (en) | 2016-03-14 | 2019-10-01 | Electronics And Telecommunications Research Institute | Processor system and fault detection method thereof |
Families Citing this family (20)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN102562798B (zh) | 2010-06-01 | 2016-08-03 | 日本精工株式会社 | 滑动装置 |
| US20120221884A1 (en) * | 2011-02-28 | 2012-08-30 | Carter Nicholas P | Error management across hardware and software layers |
| JP5341957B2 (ja) * | 2011-07-20 | 2013-11-13 | トヨタ自動車株式会社 | 内燃機関の制御装置 |
| CN103797235B (zh) * | 2011-09-12 | 2017-02-15 | 丰田自动车株式会社 | 内燃机的控制装置 |
| US9619309B2 (en) * | 2012-12-28 | 2017-04-11 | Intel Corporation | Enforcing different operational configurations for different tasks for failure rate based control of processors |
| KR101457557B1 (ko) | 2013-01-18 | 2014-11-04 | 연세대학교 산학협력단 | 멀티코어 장치, 테스트 장치 및 고장 진단 방법 |
| US9135126B2 (en) * | 2013-02-07 | 2015-09-15 | International Business Machines Corporation | Multi-core re-initialization failure control system |
| JP6268071B2 (ja) * | 2014-09-17 | 2018-01-24 | 日立オートモティブシステムズ株式会社 | 電子制御装置 |
| JP2016125436A (ja) * | 2015-01-07 | 2016-07-11 | 日立オートモティブシステムズ株式会社 | エンジン制御システム |
| JP6393628B2 (ja) * | 2015-01-21 | 2018-09-19 | 日立オートモティブシステムズ株式会社 | 車両制御装置 |
| US9694765B2 (en) * | 2015-04-20 | 2017-07-04 | Hitachi, Ltd. | Control system for an automotive vehicle |
| JP2017033236A (ja) * | 2015-07-31 | 2017-02-09 | 日立オートモティブシステムズ株式会社 | 車両制御装置 |
| DE102015222321A1 (de) * | 2015-11-12 | 2017-05-18 | Siemens Aktiengesellschaft | Verfahren zum Betrieb eines Mehrkernprozessors |
| DE102017201032A1 (de) * | 2017-01-23 | 2018-05-03 | Zf Friedrichshafen Ag | Redundante Prozessorarchitektur |
| US10672206B2 (en) * | 2017-12-11 | 2020-06-02 | GM Global Technology Operations LLC | Systems, methods and apparatuses for diagnostic fault detection by parameter data using a redundant processor architecture |
| US11475723B2 (en) * | 2017-12-29 | 2022-10-18 | Robert Bosch Gmbh | Determining a fault in an electronic controller |
| US20190243698A1 (en) * | 2018-02-02 | 2019-08-08 | Robert Bosch Gmbh | Electronic Control Unit for Flexible Replacement of Replaceable Components in a Vehicle |
| US11106205B2 (en) | 2018-09-18 | 2021-08-31 | Raytheon Technologies Corporation | Vehicle control with functional redundancy |
| US11520297B2 (en) * | 2019-03-29 | 2022-12-06 | Intel Corporation | Enhancing diagnostic capabilities of computing systems by combining variable patrolling API and comparison mechanism of variables |
| JP7306865B2 (ja) * | 2019-04-19 | 2023-07-11 | 日立Astemo株式会社 | 演算装置 |
Citations (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2006164277A (ja) * | 2004-12-02 | 2006-06-22 | Robert Bosch Gmbh | プロセッサにおけるエラー除去装置および方法,プロセッサ |
| JP2006260568A (ja) * | 2005-03-15 | 2006-09-28 | Intel Corp | アクティブ及び非アクティブ実行コアを有するマルチコアプロセッサ |
| JP2008010959A (ja) * | 2006-06-27 | 2008-01-17 | Yokogawa Electric Corp | 信号処理装置及び信号処理方法 |
| JP2008518296A (ja) * | 2004-10-25 | 2008-05-29 | ローベルト ボッシュ ゲゼルシャフト ミット ベシュレンクテル ハフツング | 少なくとも2つの実行ユニットを備えるコンピュータシステムで切換をする方法及び装置 |
| JP2008257589A (ja) * | 2007-04-06 | 2008-10-23 | Toyota Motor Corp | プロセッサ異常監視機能を備えたマルチプロセッサシステム |
| JP2009516277A (ja) * | 2005-11-18 | 2009-04-16 | ローベルト ボッシュ ゲゼルシャフト ミット ベシュレンクテル ハフツング | 少なくとも2つのレジスタ付き処理ユニットを有するシステムにおいてエラーを除去する装置および方法 |
Family Cites Families (17)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US5012409A (en) * | 1988-03-10 | 1991-04-30 | Fletcher Mitchell S | Operating system for a multi-tasking operating environment |
| CA1327838C (fr) * | 1988-06-13 | 1994-03-15 | Fred Zacouto | Dispositif implantable de protection contre les affections liees a la coagulation sanguine |
| JPH07120294B2 (ja) | 1988-10-24 | 1995-12-20 | 株式会社日立製作所 | フオールトトレラント方法及びシステム |
| JPH03196232A (ja) | 1989-12-25 | 1991-08-27 | Nec Corp | マルチプロセッサ及びその異常診断方法 |
| JPH04370713A (ja) * | 1991-05-13 | 1992-12-24 | General Electric Co <Ge> | 複数個の冗長なセンサ信号から有効な信号を選択する装置と方法 |
| JPH0773059A (ja) * | 1993-03-02 | 1995-03-17 | Tandem Comput Inc | フォールトトレラント型コンピュータシステム |
| JPH06332874A (ja) | 1993-05-24 | 1994-12-02 | Fujitsu Ltd | テストプログラム起動方法 |
| JPH0916535A (ja) | 1995-06-27 | 1997-01-17 | Mitsubishi Electric Corp | マルチプロセッサ計算機 |
| US6609031B1 (en) * | 1996-06-07 | 2003-08-19 | Advanced Neuromodulation Systems, Inc. | Multiprogrammable tissue stimulator and method |
| US6735474B1 (en) * | 1998-07-06 | 2004-05-11 | Advanced Bionics Corporation | Implantable stimulator system and method for treatment of incontinence and pain |
| GB2373861B (en) * | 2001-03-30 | 2004-07-28 | Visteon Global Tech Inc | Motor vehicle engine synchronisation |
| US6928583B2 (en) * | 2001-04-11 | 2005-08-09 | Stratus Technologies Bermuda Ltd. | Apparatus and method for two computing elements in a fault-tolerant server to execute instructions in lockstep |
| JP3606281B2 (ja) * | 2002-06-07 | 2005-01-05 | オムロン株式会社 | プログラマブルコントローラ及びcpuユニット並びに特殊機能モジュール及び二重化処理方法 |
| EP1398699A1 (de) * | 2002-09-12 | 2004-03-17 | Siemens Aktiengesellschaft | Verfahren zur Ereignissynchronisation, insbesondere für Prozessoren fehlertoleranter Systeme |
| US7200443B2 (en) * | 2003-10-07 | 2007-04-03 | John Faul | Transcutaneous electrical nerve stimulator for appetite control |
| US8214047B2 (en) * | 2004-09-27 | 2012-07-03 | Advanced Neuromodulation Systems, Inc. | Method of using spinal cord stimulation to treat gastrointestinal and/or eating disorders or conditions |
| US20070294559A1 (en) * | 2004-10-25 | 2007-12-20 | Thomas Kottke | Method and Device for Delaying Access to Data and/or Instructions of a Multiprocessor System |
-
2008
- 2008-11-28 JP JP2008303369A patent/JP4709268B2/ja not_active Expired - Fee Related
-
2009
- 2009-11-24 US US12/625,266 patent/US8417990B2/en active Active
- 2009-11-25 EP EP09177078A patent/EP2192489B1/en not_active Not-in-force
- 2009-11-25 AT AT09177078T patent/ATE545086T1/de active
Patent Citations (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2008518296A (ja) * | 2004-10-25 | 2008-05-29 | ローベルト ボッシュ ゲゼルシャフト ミット ベシュレンクテル ハフツング | 少なくとも2つの実行ユニットを備えるコンピュータシステムで切換をする方法及び装置 |
| JP2006164277A (ja) * | 2004-12-02 | 2006-06-22 | Robert Bosch Gmbh | プロセッサにおけるエラー除去装置および方法,プロセッサ |
| JP2006260568A (ja) * | 2005-03-15 | 2006-09-28 | Intel Corp | アクティブ及び非アクティブ実行コアを有するマルチコアプロセッサ |
| JP2009516277A (ja) * | 2005-11-18 | 2009-04-16 | ローベルト ボッシュ ゲゼルシャフト ミット ベシュレンクテル ハフツング | 少なくとも2つのレジスタ付き処理ユニットを有するシステムにおいてエラーを除去する装置および方法 |
| JP2008010959A (ja) * | 2006-06-27 | 2008-01-17 | Yokogawa Electric Corp | 信号処理装置及び信号処理方法 |
| JP2008257589A (ja) * | 2007-04-06 | 2008-10-23 | Toyota Motor Corp | プロセッサ異常監視機能を備えたマルチプロセッサシステム |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US10430301B2 (en) | 2016-03-14 | 2019-10-01 | Electronics And Telecommunications Research Institute | Processor system and fault detection method thereof |
Also Published As
| Publication number | Publication date |
|---|---|
| JP2010126012A (ja) | 2010-06-10 |
| US20100138693A1 (en) | 2010-06-03 |
| ATE545086T1 (de) | 2012-02-15 |
| US8417990B2 (en) | 2013-04-09 |
| EP2192489A1 (en) | 2010-06-02 |
| EP2192489B1 (en) | 2012-02-08 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP4709268B2 (ja) | 車両制御用マルチコアシステムまたは内燃機関の制御装置 | |
| JP5867495B2 (ja) | 電子制御装置 | |
| JPH05147477A (ja) | 自動車の制御装置 | |
| JP5316128B2 (ja) | 故障診断システム、電子制御ユニット、故障診断方法 | |
| JP5515792B2 (ja) | 内燃機関制御装置 | |
| US20180259577A1 (en) | Electronic control apparatus and method | |
| EP2910759A1 (en) | Torque control device for vehicle | |
| JP2003323353A (ja) | メモリ診断装置及び制御装置 | |
| KR20070068405A (ko) | 가변 클록 속도를 갖는 데이터 처리 시스템 | |
| JP2012218467A (ja) | 電子制御装置 | |
| US8954794B2 (en) | Method and system for detection of latent faults in microcontrollers | |
| JP5226653B2 (ja) | 車載制御装置 | |
| JP5978873B2 (ja) | 電子制御装置 | |
| JP6094387B2 (ja) | 制御装置 | |
| JP4820679B2 (ja) | 車両用電子制御装置 | |
| JP4664367B2 (ja) | 機能モジュールの管理システムを動作させる方法 | |
| JP6466269B2 (ja) | 電子制御装置及びスタック領域の使用監視方法 | |
| US9740584B2 (en) | Method and device for testing a computer core in a processor having at least two computer cores | |
| JPH0717337A (ja) | 電子制御ユニットの故障判定方法及び故障判定装置 | |
| JP6771272B2 (ja) | 車載電子制御装置及びスタック使用方法 | |
| CN103423011A (zh) | 半导体数据处理装置和引擎控制装置 | |
| JPH06305376A (ja) | 車輌用制御装置 | |
| JPH1131011A (ja) | 電子制御システムの故障検出装置 | |
| JP2009282849A (ja) | マイクロコンピュータ | |
| JP2021152338A (ja) | 制御装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20100908 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20100908 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20101109 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20110104 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20110215 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20110317 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 4709268 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| S533 | Written request for registration of change of name |
Free format text: JAPANESE INTERMEDIATE CODE: R313533 |
|
| R350 | Written notification of registration of transfer |
Free format text: JAPANESE INTERMEDIATE CODE: R350 |
|
| LAPS | Cancellation because of no payment of annual fees |