JP4664427B2 - 距離算出装置 - Google Patents
距離算出装置 Download PDFInfo
- Publication number
- JP4664427B2 JP4664427B2 JP2009214522A JP2009214522A JP4664427B2 JP 4664427 B2 JP4664427 B2 JP 4664427B2 JP 2009214522 A JP2009214522 A JP 2009214522A JP 2009214522 A JP2009214522 A JP 2009214522A JP 4664427 B2 JP4664427 B2 JP 4664427B2
- Authority
- JP
- Japan
- Prior art keywords
- angle
- distance
- moving
- moving object
- calculating
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
Images

















Description
このような従来技術の例として次の特許文献がある。
、現在位置から対象物までの走行距離を算出する走行距離算出手段を、距離算出装置1はさらに備えることができる。
仰角算出手段は移動物体と対象物とを結ぶ方向が水平面と成す角を仰角として算出するものであり、ピッチング角算出手段は移動物体の移動方向と鉛直方向とで決まる平面上での移動物体の回転角度をピッチング角として算出するものであり、移動距離算出手段は図1に原理を説明した実施例1におけると同様に移動物体の2つの時点間の移動距離を算出するものである。そして移動方向距離算出手段は、仰角算出手段、移動距離算出手段、およびピッチング角算出手段の出力を用いて移動物体から対象物までの直線距離の(車両の)移動方向成分を算出する。
また実施の形態においては、対象物を含む画像から対象物を認識し、その認識結果を仰角算出手段に与える対象物認識手段をさらに備えることもでき、また前述と同様の対象物認識監視手段、および対象物認識補正手段をさらに備えることもできる。
をさらに備え、ピッチング角算出手段が、傾斜角算出手段の出力を用いてピッチング角の算出を行うこともでき、あるいはさらに加速度センサを備え、ピッチング角算出手段が傾斜角算出手段の出力に加えて、加速度センサの出力を用いてピッチング角の算出を行うこともできる。
本発明において移動物体、例えば走行中の車両から、例えば直線距離が算出される固定対象物としては、信号機や道路標識をはじめとして、走行中の車両に設置されたカメラによって画像を捉えることができる看板、踏み切り、歩道橋、横断歩道、停止線などの各種の対象物までの距離が算出される。距離算出のために画像センサ、ヨーレートセンサ、車速センサ、および加速度センサなどからデータを、例えば100ms毎に取り込んで、対象物認識や方位角算出などの各種の処理を100ms毎に行い、最終的に例えば対象物までの直線距離を100ms毎に算出する。以下の説明では、信号機を対象物の具体例として実施例を説明する。
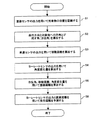
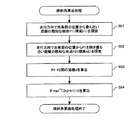
理が開始されると、まずステップS1で画像センサ11の出力を用いて対象物の位置認識、例えば信号機の赤や青の信号の画像中の座標の出力が行われ、ステップS2で車両の進行方向と対象物への方向とが成す角、すなわち方位角が算出され、ステップS3で車速センサ12の出力を用いてある2つの時点の間の車両の移動距離、すなわち処理間隔100msの間の移動距離が算出され、ステップS4でヨーレートセンサ13の出力を用いて車両の鉛直軸周りの角度変化量が算出される。
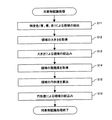
で円形度の大きさによる領域の絞込み、すなわち円形度の値があらかじめ定められた閾値、例えば0.8よりも大きい時にのみ、その領域が信号機の信号光の領域として認識される。そして処理結果として、画像中の信号機の信号光の領域の中心の座標が出力される。ここで円形度は完全な円に対しては1となるが、ここではステップS13で抽出されたすべての領域の中で円形度が閾値より大きい領域の中心の座標が出力されるものとする。座標が複数出力されることも考えられるが、その場合出力された座標それぞれに関して、方位角等の算出を行うものとする。
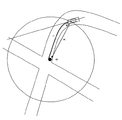
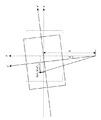
の方位角をθ2とする。A1のときの車両の進行方向にA2から垂線を下ろし、交点をA
2’とする。A1−A2’の距離をD’、A2−A2’の距離をdとすると、移動距離算出部16により算出された移動距離Dと角度変化量算出部17により算出された角度変化量γにより、D’とdを近似的に表すと、
D’=Dcosγ
d=Dsinγ
A1のときの進行方向にSから垂線を下ろし、交点をOとする。A2’地点からOまでの距離をX’とすると、下記の式が成り立つ。
これにX’について解くと
X’=(D’tanθ1−d)/(tan(θ2+γ)−tanθ1)
=(Dcosγtanθ1−Dsinγ)/(tan(θ2+γ)−tanθ1)
A2からSまでの距離Xは以下の式によって表される。
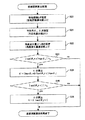
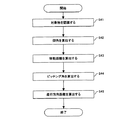
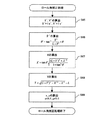
図7は直線距離算出部18による、車両から対象物までの直線距離算出処理のフローチャートである。同図において処理が開始されるとステップS20で移動距離算出部16によって移動距離Dが、ステップS21で方位角算出部15によって方位角θ1、θ2が、ステップS22で角度変化量算出部17によってγの値が設定され、ステップS23でX’の算出式の分母の絶対値がある閾値t1が大きいか否かが判定される。この分母が0であ
る場合、X’の値を求めることができず、分母が0に近い場合にもX’を正確に求めることができないため、そのような場合には直ちに処理を終了する。
でXの算出式の分母がある閾値t2より大きいか否かが判定され、大きくない場合には直
ちに処理を終了し、大きい場合にはステップS26でXの値が算出されて処理を終了する。
合には、過去の車両と対象物までの距離、およびその後の車両の車速やヨーレートなどを用いて車両の現在位置を予測し、対象物までの直線距離を算出することができる。図6においてA1地点から信号機Sまでの距離をX”とすると、X’は次式によって与えられ、前述のX’をこの値で置き換えてXを算出することも可能である。
図7のステップS25でXの分母が閾値t2以下である時には、Xの算出を行うことが
できないが、速度が極端が遅く、移動距離があまりない時には、X”の値からDの値を減算し、Xの値を近似的に求めることが可能である。
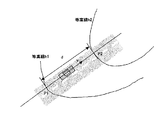
ルの総和が対象物の位置Sに達するまで演算を繰り返すことによって、ベクトルの長さの総和を取り、対象物までの走行距離を予測する。
た垂線の足をS’とすると、最初のベクトルl0がS’の方向と成す角は、角速度ωと微
小時間Δtの積となる。次のベクトルl1とS’方向の成す角は、2ωと微小時間Δtと
の積となる。同様にして各ベクトルの方向を求め、また各ベクトルの長さを現在の車両の速度vと微小時間Δtとの積として計算することによって、各ベクトルの長さとその方向が決定され、対象物の位置Sに達するまでの走行距離の予測が行われる。
識部14、車速センサ12の出力を用いる移動距離算出部16、現在位置センサ21の出力を用いるデータベース22に加えて、対象物認識部14の出力を用いて対象物方向の仰角を算出する仰角算出部25、データベース22の出力を用いて車両の傾斜角を算出する傾斜角算出部26、傾斜角算出部の26の出力を用いて車両のピッチング角を算出するピッチング角算出部27を備え、直線距離算出部18に代わる進行方向距離算出部28は、仰角算出部25、移動距離算出部16、およびピッチング角算出部27の出力を用いて対象物までの直線距離の車両の進行方向成分を算出する。
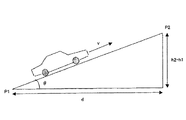
傾斜角算出部26は、現在位置センサ21により検出された現在位置周辺の地図データがデータベース22から与えられることにより、現在位置周辺で標高値のわかっている2つの地点の標高の差に基づいて、自車両周辺位置の傾斜角を算出し、ピッチング角算出部27に与えるものであり、傾斜角算出方法の詳細については後述する。
標高の値がわかっている2つの地点P1とP2が存在するものとする。
図16の傾斜角算出処理のフローチャートにおいて処理が開始されると、まずステップS51、S52で自車両の現在の位置から最も距離が近く、標高の値の既知な2つの地点P1、P2が探索され、ステップS53で2つの地点の間の地図上での距離dが算出され、ステップS54で傾斜角θの算出が行われて処理を終了する。
Xについて解くと、
X=Dtanφ1/(tanφ2−tanφ1)
となり、対象物までの距離が算出できる。カメラの光軸方向が車両の進行方向に比べ仰角ρcだけ上を向いている(カメラの設置時に設定)場合でも、距離Xは以下の式によって
表される。
また、A1地点においてピッチング角算出部27により算出したピッチング角をρ1、
A2地点においてピッチング角算出部27により算出したピッチング角をρ2とする。こ
のとき、距離Xは以下の式によって表される。
このように、進行方向距離算出部28は、仰角算出部25により算出された仰角、移動距離算出部16により算出した移動距離およびピッチング角算出部27により算出したピッチング角に基づき、車両と対象物の距離の車両の進行方向と平行な成分を算出する。
、t1以下の値であるときには直ちに処理を終了し、閾値を超えている場合にはステップ
S60でXの値が算出されて処理を終了する。ステップS59でXを算出する式の分母の絶対値が0、または0に近い時、Xを正確に算出することはできないが、車両の速度が極
端に遅く、移動距離Dが小さい時には1つ前の時点で算出した距離Xから移動距離Dを減算して、進行方向距離Xを近似的に求めることもできる。
てこの直線距離を用いることによって、走行距離算出部23は対象物までの走行距離を算出することができる。
X、YとX’、Y’の関係により以下の2式が成立する。
(L+Y)2+X2=(L+Y’)2+X’2

x=X/l、y=Y/l
図26は、ロール角補正処理のフローチャートである。同図において、ステップS65でロール角θが生じた場合の対象物の座標(x’、y’)から、対象物の画像の中心からの距離X’、Y’が算出され、ステップS66でθ’の値が算出され、ステップS67で補正後の対象物の画像の中心からの距離X、ステップS68でYが算出され、ステップS69で補正後の画像上の座標(x、y)が算出されて処理を終了する。
力やその変化率の異常が通知された時に、ヨーレートセンサの出力値に代わって、過去のヨーレートや速度の値などに基づき線形予測やカルマンフィルタによる予測の結果を利用して補正されたヨーレートの値を角度変化量算出部17に与える。
(付記1)
移動物体と固定対象物との間の距離を算出する装置において、
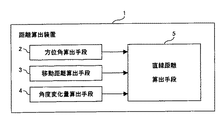
移動物体と対象物とを結ぶ方向と該移動物体の移動方向とが水平面上で成す角を方位角として算出する方位角算出手段と、
該移動物体の2つの時点間の移動距離を算出する移動距離算出手段と、
該2つの時点間の移動物体の重心を通る垂直軸回りの移動物体の回転角度を、移動方向の角度変化量として算出する角度変化量算出手段と、
該方位角算出手段、移動距離算出手段、および角度変化量算出手段の出力を用いて、移動物体と対象物との間の直線距離を算出する直線距離算出手段とを備えることを特徴とする距離算出装置。
(付記2)
前記移動物体の現在位置を検出する現在位置センサと、
該現在位置センサの出力に応じて、該現在位置周辺の道路を含む地図情報を出力するデータベース手段と、
該データベース手段、前記方位角算出手段、および直線距離算出手段の出力を用いて、現在位置から前記対象物までの移動軌道上の距離を算出する走行距離算出手段をさらに備えることを特徴とする付記1記載の距離算出装置。
(付記3)
前記対象物を含む画像から対象物を認識し、該認識結果を前記方位角算出手段に与える対象物認識手段をさらに備えることを特徴とする付記1記載の距離算出装置。
(付記4)
前記対象物認識手段の出力が、あらかじめ定められた範囲を逸脱したか否かを監視する対象物認識監視手段と、
該対象物認識監視手段が該逸脱を検出した時、該対象物認識手段の出力を補正して前記方位角算出手段に与える対象物認識補正手段をさらに備えることを特徴とする付記3記載の距離算出装置。
(付記5)
前記移動物体の現在位置を検出する現在位置センサと、
該現在位置センサの出力に応じて、該現在位置周辺の道路を含む地図情報を出力するデータベース手段と、
移動物体の速度を前記移動距離算出手段に与える速度センサと、
該データベース手段と速度センサとの出力を用いて、移動物体の移動方向軸の回りの回転角度をロール角として算出するロール角算出手段と、
該ロール角算出手段と前記対象物認識手段との出力を用いて、対象物の認識結果としての座標を補正し、前記方位角算出手段に与えるロール角補正手段とをさらに備えることを特徴とする付記3記載の距離算出装置。
(付記6)
前記移動物体の鉛直軸回りの回転角速度を検出し、前記角度変化量算出手段に与えるヨーレートセンサと、
該ヨーレートセンサと前記直線距離算出手段との出力を用いて、移動物体から前記対象物までの移動軌道上の距離を予測する距離予測手段をさらに備えることを特徴とする付記1記載の距離算出装置。
(付記7)
前記ヨーレートセンサの出力値、および/または出力値の変化率があらかじめ定められた出力値の範囲、および/または出力値の変化率の範囲を逸脱したか否かを監視するヨーレートセンサ監視手段と、
ヨーレートセンサ監視手段が該逸脱を検出した時、過去のヨーレートセンサの出力と移動物体の速度の値に基づいて、ヨーレートセンサの出力値を補正して前記角度変化量算出手段に与えるヨーレート補正手段をさらに備えることを特徴とする付記6記載の距離算
出装置。
(付記8)
移動物体と固定対象物との間の距離を算出する装置において、
移動物体と対象物とを結ぶ方向が水平面と成す角を仰角として算出する仰角算出手段と、
移動物体の2つの時点間の移動距離を算出する移動距離算出手段と、
移動物体の移動方向と鉛直方向とで決まる平面上での移動物体の回転角度をピッチング角として算出するピッチング角算出手段と、
該仰角算出手段、移動距離算出手段、およびピッチング角算出手段の出力を用いて、移動物体から対象物までの直線距離の移動方向成分を算出する移動方向距離算出手段とを備えることを特徴とする距離算出装置。
(付記9)
前記移動物体の現在位置を検出する現在位置センサと、
該現在位置センサの出力に応じて、該現在位置周辺の道路を含む地図情報を出力するデータベース手段と、
移動物体と対象物とを結ぶ方向と移動物体の移動方向とが水平面上で成す角を方位角として算出する方位角算出手段と、
該データベース手段、方位角算出手段、および前記移動方向距離算出手段の出力を用いて、現在位置から前記対象物までの移動軌道上の距離を算出する走行距離算出手段をさらに備えることを特徴とする付記8記載の距離算出装置。
(付記10)
前記対象物を含む画像から対象物を認識し、該認識結果を前記仰角算出手段に与える対象物認識手段をさらに備えることを特徴とする付記8記載の距離算出装置。
(付記11)
前記移動物体の現在位置を検出する現在位置センサと、
該現在位置センサの出力に応じて、該現在位置周辺の道路を含む地図情報を出力するデータベース手段と、
移動物体の速度を前記移動距離算出手段に与える速度センサと、
該データベース手段と速度センサとの出力を用いて移動物体の移動方向の回りの回転角度をロール角として算出するロール角算出手段と、
該ロール角算出手段と前記対象物認識手段との出力を用いて対象物の認識結果としての座標を補正し、前記仰角算出手段に与えるロール角補正手段とをさらに備えることを特徴とする付記10記載の距離算出装置。
(付記12)
前記移動物体の現在位置を検出する現在位置センサと、
該現在位置センサの出力に応じて、該現在位置周辺の道路を含む地図情報を出力するデータベース手段と、
該データベース手段の出力を用いて、該移動物体の現在位置付近の移動方向の傾斜角を算出する傾斜角算出手段とをさらに備え、
前記ピッチング角算出手段が、該傾斜角算出手段の出力を用いてピッチング角の算出を行うことを特徴とする付記8記載の距離算出装置。
(付記13)
前記移動物体の移動方向の加速度を検出する加速度センサをさらに備え、
前記ピッチング角算出手段が、前記傾斜角算出手段の出力に加えて、該加速度センサの出力を用いてピッチング角の算出を行うことを特徴とする付記12記載の距離算出装置。
(付記14)
前記移動物体の移動方向の加速度を検出する加速度センサをさらに備え、
前記ピッチング角算出手段が、該加速度センサの出力を用いてピッチング角の算出を行うことを特徴とする付記8記載の距離算出装置。
(付記15)
前記移動物体の鉛直軸回りの回転角速度を検出し、前記角度変化量算出手段に与えるヨーレートセンサと、
移動物体と対象物とを結ぶ方向と移動物体の移動方向とが水平面で成す角を方位角として算出する方位角算出手段と、
該ヨーレートセンサ、方位角算出手段、および前記移動方向距離算出手段の出力を用いて、移動物体から前記対象物までの移動軌道上の距離を予測する距離予測手段をさらに備えることを特徴とする付記8記載の距離算出装置。
(付記16)
移動物体と固定対象物との間の距離を算出する計算機によって使用されるプログラムにおいて、
移動物体と対象物とを結ぶ方向と該移動物体の移動方向とが水平面上で成す角を方位角として算出する手順と、
該移動物体の2つの時点間の移動距離を算出する手順と、
該2つの時点間の移動物体の重心を通る垂直軸回りの移動物体の回転角度を、移動方向の角度変化量として算出する手順と、
該算出された方位角、移動距離、および角度変化量を用いて、移動物体と対象物との間の直線距離を算出する手順とを計算機に実行させるための距離算出プログラム。
(付記17)
移動物体と固定対象物との間の距離を算出する計算機によって使用される記憶媒体において、
移動物体と対象物とを結ぶ方向と該移動物体の移動方向とが水平面上で成す角を方位角として算出するステップと、
該移動物体の2つの時点間の移動距離を算出するステップと、
該2つの時点間の移動物体の重心を通る垂直軸回りの移動物体の回転角度を、移動方向の角度変化量として算出するステップと、
該算出された方位角、移動距離、および角度変化量を用いて、移動物体と対象物との間の直線距離を算出するステップとを計算機に実行させるためのプログラムを格納した計算機読出し可能可搬型記憶媒体。
(付記18)
移動物体と固定対象物との間の距離を算出する計算機によって使用されるプログラムにおいて、
移動物体と対象物とを結ぶ方向が水平面と成す角を仰角として算出する手順と、
移動物体の2つの時点間の移動距離を算出する手順と、
移動物体の移動方向と鉛直方向とで決まる平面上での移動物体の回転角度をピッチング角として算出する手順と、
該算出された仰角、移動距離、およびピッチング角を用いて、移動物体から対象物までの直線距離の移動方向成分を算出する手順とを計算機に実行させるための距離算出プログラム。
(付記19)
移動物体と固定対象物との間の距離を算出する計算機によって使用される記憶媒体において、
移動物体と対象物とを結ぶ方向が水平面と成す角を仰角として算出するステップと、
移動物体の2つの時点間の移動距離を算出するステップと、
移動物体の移動方向と鉛直方向とで決まる平面上での移動物体の回転角度をピッチング角として算出するステップと、
該算出された仰角、移動距離、およびピッチング角を用いて、移動物体から対象物までの直線距離の移動方向成分を算出するステップとを計算機に実行させるためのプログラムを格納した計算機読出し可能可搬型記憶媒体。
Claims (2)
- 移動物体と固定対象物との間の距離を算出する装置において、
前記対象物を含む画像から前記対象物を認識する対象物認識手段と、
前記画像の撮影に用いられたレンズの位置を通る水平面上で前記移動物体の進行方向に垂直な方向であるx方向のピクセル単位の座標であって前記対象物認識手段による認識結果として得られる前記画像中の前記対象物の座標xと、前記水平面に垂直なy方向のピクセル単位の座標であって前記対象物認識手段による認識結果として得られる前記画像中の前記対象物の座標yに基づいて、前記画像の撮像面上での前記x方向および前記y方向のピクセルの寸法sと、前記レンズの焦点距離Fとを用いて、前記移動物体と前記対象物とを結ぶ方向が水平面と成す角を仰角tan−1(|ys|/((xs)2+F2)1/2)として算出する仰角算出手段と、
前記移動物体の2つの時点間の移動距離Dを算出する移動距離算出手段と、
前記移動物体の移動方向と鉛直方向とで決まる平面上での前記移動物体の回転角度をピッチング角として算出するピッチング角算出手段と、
前記移動物体の進行方向に対する前記レンズの光軸方向の仰角ρc、前記仰角算出手段が前記2つの時点それぞれについて算出した仰角φ1およびφ2、前記移動距離算出手段が算出した前記移動距離D、ならびに前記ピッチング角算出手段が前記2つの時点それぞれについて算出したピッチング角ρ1およびρ2を用いて、
X=Dtan(φ1+ρc+ρ1)/(tan(φ2+ρc+ρ2)−tan(φ1+ρc+ρ1))
なる式により前記移動物体から前記対象物までの直線距離の移動方向成分Xを算出する移動方向距離算出手段とを備え、
前記ピッチング角算出手段は、
前記移動物体が水平面上を一定の加速度で走行している時のピッチング角を、複数の加速度について予め測定した測定結果から得られる、加速度とピッチング角との第1の関係に基づいて、前記移動物体の前記進行方向の加速度から前記ピッチング角を算出するか、
前記移動物体が一定の傾斜角の斜面を一定の加速度で走行している時のピッチング角を、複数の傾斜角と複数の加速度について予め測定した測定結果から得られる、傾斜角と加速度の組とピッチング角との第2の関係に基づいて、前記移動物体が走行している面の傾斜角と前記移動物体の前記進行方向の加速度から前記ピッチング角を算出するか、または、
前記移動物体が一定の傾斜角の斜面に停止している時のピッチング角を、複数の傾斜角について予め測定した測定結果から得られる、傾斜角とピッチング角との第3の関係に基づいて、前記移動物体が走行している面の傾斜角から前記ピッチング角の第1の成分を算出し、前記第1の関係に基づいて、前記移動物体の前記進行方向の前記加速度から前記ピッチング角の第2の成分を算出し、前記第1の成分と前記第2の成分から前記ピッチング角を算出する、
ことを特徴とする距離算出装置。 - 前記移動物体の現在位置を検出する現在位置センサと、
該現在位置センサの出力に応じて、該現在位置周辺の道路を含む地図情報を出力するデータベース手段と、
前記移動物体の速度を前記移動距離算出手段に与える速度センサと、
前記データベース手段と前記速度センサとの出力を用いて前記移動物体の移動方向の回りの回転角度をロール角として算出するロール角算出手段と、
該ロール角算出手段と前記対象物認識手段との出力を用いて前記対象物の認識結果としての座標を補正し、前記仰角算出手段に前記座標xおよび前記座標yとして与えるロール角補正手段と、
をさらに備えることを特徴とする請求項1記載の距離算出装置。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2009214522A JP4664427B2 (ja) | 2009-09-16 | 2009-09-16 | 距離算出装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2009214522A JP4664427B2 (ja) | 2009-09-16 | 2009-09-16 | 距離算出装置 |
Related Parent Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2005510146A Division JP4398430B2 (ja) | 2003-10-31 | 2003-10-31 | 距離算出装置および算出プログラム |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2009300457A JP2009300457A (ja) | 2009-12-24 |
| JP4664427B2 true JP4664427B2 (ja) | 2011-04-06 |
Family
ID=41547465
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2009214522A Expired - Fee Related JP4664427B2 (ja) | 2009-09-16 | 2009-09-16 | 距離算出装置 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP4664427B2 (ja) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| RU2557808C1 (ru) * | 2014-04-09 | 2015-07-27 | Федеральное государственное образовательное бюджетное учреждение высшего профессионального образования "Санкт-Петербургский государственный университет телекоммуникаций им. проф. М.А. Бонч-Бруевича" | Способ определения наклонной дальности до движущейся цели пассивным моностатическим пеленгатором |
Families Citing this family (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP5834395B2 (ja) * | 2010-11-02 | 2015-12-24 | アイシン精機株式会社 | 距離推定装置、距離推定方法及びプログラム |
| JP5639874B2 (ja) * | 2010-12-24 | 2014-12-10 | 株式会社日立製作所 | 運転支援装置 |
| JP2013145168A (ja) * | 2012-01-13 | 2013-07-25 | Denso Corp | 車載用ジャイロの角速度誤差補正装置 |
| KR20140044964A (ko) | 2012-09-07 | 2014-04-16 | 주식회사 만도 | 차량간 거리 연산 장치 및 그 거리 연산 방법 |
| KR101709317B1 (ko) * | 2015-07-31 | 2017-02-22 | 부경대학교 산학협력단 | 단일 카메라와 gps를 이용한 영상 내 객체의 좌표 산출 방법 |
| JP6657753B2 (ja) * | 2015-10-14 | 2020-03-04 | 富士通株式会社 | 加速度補正プログラム、路面状態評価プログラム、加速度補正方法および加速度補正装置 |
| CN105416290B (zh) * | 2015-11-30 | 2017-11-14 | 奇瑞汽车股份有限公司 | 检测车距的方法和装置 |
Citations (9)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH05196437A (ja) * | 1992-01-20 | 1993-08-06 | Nippon Telegr & Teleph Corp <Ntt> | 3次元情報入力装置 |
| JPH05314243A (ja) * | 1992-04-03 | 1993-11-26 | Sony Corp | 3次元形状復元方法 |
| JPH0735560A (ja) * | 1993-07-23 | 1995-02-07 | Nippondenso Co Ltd | ナビゲーション装置 |
| JPH10341458A (ja) * | 1997-06-10 | 1998-12-22 | Toyota Motor Corp | 車載ステレオカメラの校正方法、および、その方法を適用した車載ステレオカメラ |
| JPH1163949A (ja) * | 1997-08-20 | 1999-03-05 | Ricoh Co Ltd | 3次元形状復元装置及び方法 |
| JP2000161915A (ja) * | 1998-11-26 | 2000-06-16 | Matsushita Electric Ind Co Ltd | 車両用単カメラ立体視システム |
| JP2001187553A (ja) * | 1999-10-21 | 2001-07-10 | Matsushita Electric Ind Co Ltd | 駐車支援装置 |
| JP2002501349A (ja) * | 1998-01-06 | 2002-01-15 | インテル・コーポレーション | 3−d視覚画像を作成するために相対的なカメラ向き位置を決定する方法 |
| JP4398430B2 (ja) * | 2003-10-31 | 2010-01-13 | 富士通株式会社 | 距離算出装置および算出プログラム |
-
2009
- 2009-09-16 JP JP2009214522A patent/JP4664427B2/ja not_active Expired - Fee Related
Patent Citations (9)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH05196437A (ja) * | 1992-01-20 | 1993-08-06 | Nippon Telegr & Teleph Corp <Ntt> | 3次元情報入力装置 |
| JPH05314243A (ja) * | 1992-04-03 | 1993-11-26 | Sony Corp | 3次元形状復元方法 |
| JPH0735560A (ja) * | 1993-07-23 | 1995-02-07 | Nippondenso Co Ltd | ナビゲーション装置 |
| JPH10341458A (ja) * | 1997-06-10 | 1998-12-22 | Toyota Motor Corp | 車載ステレオカメラの校正方法、および、その方法を適用した車載ステレオカメラ |
| JPH1163949A (ja) * | 1997-08-20 | 1999-03-05 | Ricoh Co Ltd | 3次元形状復元装置及び方法 |
| JP2002501349A (ja) * | 1998-01-06 | 2002-01-15 | インテル・コーポレーション | 3−d視覚画像を作成するために相対的なカメラ向き位置を決定する方法 |
| JP2000161915A (ja) * | 1998-11-26 | 2000-06-16 | Matsushita Electric Ind Co Ltd | 車両用単カメラ立体視システム |
| JP2001187553A (ja) * | 1999-10-21 | 2001-07-10 | Matsushita Electric Ind Co Ltd | 駐車支援装置 |
| JP4398430B2 (ja) * | 2003-10-31 | 2010-01-13 | 富士通株式会社 | 距離算出装置および算出プログラム |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| RU2557808C1 (ru) * | 2014-04-09 | 2015-07-27 | Федеральное государственное образовательное бюджетное учреждение высшего профессионального образования "Санкт-Петербургский государственный университет телекоммуникаций им. проф. М.А. Бонч-Бруевича" | Способ определения наклонной дальности до движущейся цели пассивным моностатическим пеленгатором |
Also Published As
| Publication number | Publication date |
|---|---|
| JP2009300457A (ja) | 2009-12-24 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP4398430B2 (ja) | 距離算出装置および算出プログラム | |
| JP4664427B2 (ja) | 距離算出装置 | |
| US11113544B2 (en) | Method and apparatus providing information for driving vehicle | |
| US8239131B2 (en) | Navigation device, navigation method, and navigation program | |
| US6753902B1 (en) | Image processing apparatus, image processing method, navigation apparatus, program storage device and computer data signal embodied in carrier wave | |
| CN103718224B (zh) | 三维物体检测装置和三维物体检测方法 | |
| US9448074B2 (en) | Curve modeling device, curve modeling method, and vehicular navigation device | |
| RU2668459C1 (ru) | Устройство оценки положения и способ оценки положения | |
| JP5639874B2 (ja) | 運転支援装置 | |
| JP6881369B2 (ja) | 自車位置推定装置 | |
| JP2001331787A (ja) | 道路形状推定装置 | |
| JP5088401B2 (ja) | 道路構造測定方法および道路面測定装置 | |
| CN101576387B (zh) | 导航信息修正方法及其导航装置 | |
| EP3499187B1 (en) | Method and apparatus for determining object position | |
| EP4001844A1 (en) | Method and apparatus with localization | |
| CN111238490B (zh) | 视觉定位方法、装置以及电子设备 | |
| US11908206B2 (en) | Compensation for vertical road curvature in road geometry estimation | |
| JP7234840B2 (ja) | 位置推定装置 | |
| JP6422431B2 (ja) | 慣性センサの改良 | |
| JP4375549B2 (ja) | 車両位置特定装置 | |
| JP6522270B1 (ja) | 支援画像表示装置、支援画像表示方法及び支援画像表示プログラム | |
| US11543257B2 (en) | Navigation apparatus and operation method of navigation apparatus | |
| JP6037351B2 (ja) | 車両画像処理装置および車両画像処理方法 | |
| JP3081788B2 (ja) | 局地的位置把握装置 | |
| US11971257B2 (en) | Method and apparatus with localization |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20101228 |
|
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20110106 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 4664427 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20140114 Year of fee payment: 3 |
|
| LAPS | Cancellation because of no payment of annual fees |