JP4660772B2 - 検体動作制御装置、検体動作用のパラメータの取得方法、及び検体動作制御方法 - Google Patents
検体動作制御装置、検体動作用のパラメータの取得方法、及び検体動作制御方法 Download PDFInfo
- Publication number
- JP4660772B2 JP4660772B2 JP2006531248A JP2006531248A JP4660772B2 JP 4660772 B2 JP4660772 B2 JP 4660772B2 JP 2006531248 A JP2006531248 A JP 2006531248A JP 2006531248 A JP2006531248 A JP 2006531248A JP 4660772 B2 JP4660772 B2 JP 4660772B2
- Authority
- JP
- Japan
- Prior art keywords
- pipette
- specimen
- vibration
- sample
- storage unit
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images








Classifications
-
- C—CHEMISTRY; METALLURGY
- C12—BIOCHEMISTRY; BEER; SPIRITS; WINE; VINEGAR; MICROBIOLOGY; ENZYMOLOGY; MUTATION OR GENETIC ENGINEERING
- C12M—APPARATUS FOR ENZYMOLOGY OR MICROBIOLOGY; APPARATUS FOR CULTURING MICROORGANISMS FOR PRODUCING BIOMASS, FOR GROWING CELLS OR FOR OBTAINING FERMENTATION OR METABOLIC PRODUCTS, i.e. BIOREACTORS OR FERMENTERS
- C12M33/00—Means for introduction, transport, positioning, extraction, harvesting, peeling or sampling of biological material in or from the apparatus
- C12M33/04—Means for introduction, transport, positioning, extraction, harvesting, peeling or sampling of biological material in or from the apparatus by injection or suction, e.g. using pipettes, syringes, needles
-
- C—CHEMISTRY; METALLURGY
- C12—BIOCHEMISTRY; BEER; SPIRITS; WINE; VINEGAR; MICROBIOLOGY; ENZYMOLOGY; MUTATION OR GENETIC ENGINEERING
- C12M—APPARATUS FOR ENZYMOLOGY OR MICROBIOLOGY; APPARATUS FOR CULTURING MICROORGANISMS FOR PRODUCING BIOMASS, FOR GROWING CELLS OR FOR OBTAINING FERMENTATION OR METABOLIC PRODUCTS, i.e. BIOREACTORS OR FERMENTERS
- C12M21/00—Bioreactors or fermenters specially adapted for specific uses
- C12M21/06—Bioreactors or fermenters specially adapted for specific uses for in vitro fertilization
Landscapes
- Health & Medical Sciences (AREA)
- Life Sciences & Earth Sciences (AREA)
- Wood Science & Technology (AREA)
- Engineering & Computer Science (AREA)
- Bioinformatics & Cheminformatics (AREA)
- Organic Chemistry (AREA)
- Chemical & Material Sciences (AREA)
- Zoology (AREA)
- Genetics & Genomics (AREA)
- Biotechnology (AREA)
- Sustainable Development (AREA)
- Microbiology (AREA)
- Molecular Biology (AREA)
- Biochemistry (AREA)
- General Engineering & Computer Science (AREA)
- General Health & Medical Sciences (AREA)
- Biomedical Technology (AREA)
- Manipulator (AREA)
- Automatic Analysis And Handling Materials Therefor (AREA)
- Apparatus Associated With Microorganisms And Enzymes (AREA)
- Sampling And Sample Adjustment (AREA)
Description
マニピュレータを用いる方法としては、例えば、ホールディングピペットを対象物に引っ掛けてまわしたり、ホールディングピペットの内圧を変化させ、吸ったりはいたりして、偶発的に検体の姿勢を変化させるものがある。しかしながら、このような手法は熟練を要し、初心者の場合、非常に時間がかかり、効率が悪いことが知られている。このため、この方法では、対象物の姿勢や位置の調整を補助するシステムや、あるいは自動的にインジェクションするシステムが必要となるという不都合がある。
交流電場を用いる方法としては、例えば、複数の電極をシャーレ内に設置し、交流電界を印加することで、細胞などの誘電体の姿勢、および位置を制御するものがある。この方法では、電界の印加による細胞などへのダメージを考慮する必要がある。また、ガラスピペット近傍に精度よく試料を配置することが困難であり、ガラスピペットを試料に近づける必要がある。このため、交流電場を用いる方法は、非常に限定された作業でしか用いられないのが現状である。
レーザ光を用いる方法としては、レーザ光をレンズにより集光させ、透明な試料を操作するものがある。この方法では、使用するレーザ光の出力を高めることで、数μm以下の加工を行うことも出来る。この方法は、非接触での試料の操作と加工を同時に行えるが、レーザ光を使用するため、通常の顕微上での操作にそのまま用いることは出来ず、専用の装置を新たに構築する必要がある。このため、この方法を実現するには、非常に高いコストを要するという欠点がある。
振動を用いる方法の例として、ガラスピットなどの棒状の振動子を振動させ、振動子に少なくとも一つの定在波を生じさせるものがある(下記特許文献2参照)。この方法では、振動子に生じた定在波の節部に試料を捕捉し、試料の回転を行う。
前記振動部は、前記ピペットを振動させる構成となっている。前記制御部は、前記振動部に対して、前記ピペットを振動させるための振動信号を供給する構成となっている。前記記憶部は、前記振動信号を生成するためのパラメータを記憶する構成となっている。前記パラメータは、前記ピペットから所定距離内にある検体を引き寄せる波動を前記液体内において発生させる第一の振動波を生成するための情報と、引き寄せられた検体を回転させる波動を発生させる第二の振動波を生成するための情報とを含んでいる。
(1)ピペットの位置と検体の位置とを前記記憶部に記憶するステップ;
(2)前記ステップ(1)の後、前記ピペットと前記検体との距離が所定範囲内か否かを制御部により判断するステップ;
(3)前記ピペットと前記検体との距離が所定範囲内である場合には、前記ピペットを振動させ、前記検体が前記ピペットに接近した時の第一の振動波を再現するためのパラメータを前記記憶部に記憶するステップ;
(4)前記ステップ(3)の後、前記ピペットを振動させ、前記検体が回転した時の第二の振動波を再現するためのパラメータを前記記憶部に記憶するステップ。
(1)ピペットの位置と検体の位置とを前記記憶部に記憶するステップ;
(2)前記ステップ(1)の後、前記ピペットと前記検体との距離が所定範囲内か否かを制御部により判断するステップ;
(3)前記ピペットと前記検体との距離が所定範囲内である場合には、前記記憶部に記憶されたパラメータに基づいて、第一の振動波を生成し、前記ピペットを振動させて、前記検体を前記ピペットに接近させるステップ;
(4)前記ステップ(3)の後、前記憶部に記憶されたパラメータに基づいて、第二の振動波を生成し、前記ピペットを振動させて、前記検体を回転させるステップ。
(1)ピペットと検体との距離が所定範囲内か否かを制御部により判断するステップ;
(2)前記ピペットと前記検体との距離が所定範囲内である場合には、前記ピペットを振動させ、前記検体が前記ピペットに接近した時の第一の振動波を再現するためのパラメータを前記記憶部に記憶するステップ;
(3)前記ステップ(2)の後、前記ピペットを振動させ、前記検体が回転した時の第二の振動波を再現するためのパラメータを前記記憶部に記憶するステップ。
(1)ピペットと検体との距離が所定範囲内か否かを制御部により判断するステップ;
(2)前記ピペットと前記検体との距離が所定範囲内である場合には、前記記憶部に記憶されたパラメータに基づいて、第一の振動波を生成し、前記ピペットを振動させて、前記検体を前記ピペットに接近させるステップ;
(3)前記ステップ(2)の後、前記憶部に記憶されたパラメータに基づいて、第二の振動波を生成し、前記ピペットを振動させて、前記検体を回転させるステップ。
以下、本発明の一実施形態を、添付の図面を参照しながら説明する。まず、本実施形態に係る検体動作制御装置の基本的な構成を図1に基づいて説明する。前提として、この装置は、容器1内の液体2の中に配置された検体3を操作するものである。検体3とは、例えば、卵子などの細胞であるが、他の微小な検体であってもよい。検体の大きさは特に限定されない。
つぎに、本実施形態の装置を用いた、検体動作用のパラメータを取得する方法の一例を、図2のフローチャートを参照しながら説明する。なお、この取得方法は、記憶部8のROM81に格納されたプログラムおよびパラメータに基づいて実行される。また、この方法において取得されたデータ又はパラメータは、RAM82に記憶される。
まず、ピペット4の先端と検体3とを含む画像を、カメラ10により取得する。ついで、この画像を解析して、これらの位置を制御部7により解析し、結果を記憶部8のRAM82に格納する。
ついで、ピペット4の先端と検体3との距離が、規定値以内であるかどうかを、制御部7により判断する。規定値は、予めROM81に記憶しておく。
ピペット4の先端と検体3との距離が規定値を超えている場合は、ロボット6を、検体3の方向に移動させる(図3(a)参照)。その後、ステップ2−3からの手順を繰り返す。
ピペット4の先端と検体3との距離が規定値以内であれば、制御部7および振動部5によってピペット4を振動させる(図3(b)参照)。このとき、ピペット4を振動させるパラメータの範囲は、ROM82に予め記憶しておくものとする。つまり、制御部7は、予め決められた範囲において、ピペット4の振動のためのパラメータを掃引(スイープ)していく。
ステップ2−5の動作により、検体3とピペット4の先端との距離が所定の距離まで近づいた場合には(ステップ2−6)、そのような動作を引き起こしたときの振動波(この振動波が第一の振動波に相当する)を再現するためのパラメータを記憶部8のRAM82に記憶する。ステップ2−6における判断は、制御部7が、カメラ10の画像に基づいて行う。この第一の振動波を再現するためのパラメータとは、例えば、振動の振幅値や周波数であるが、これ以外の情報をさらに含んでいても良い。なお、ステップ2−6の判断において用いる所定の距離も予めROM81に記憶しておく。
つぎに、制御部7は、検体3が所定の位置において停止したかどうかを、カメラ10で取得した画像に基づいて判断する。この所定の位置も予めROM81に記憶しておく。判断結果がNoであれば、検体3の移動(接近)の動作を継続する。判断結果がYesであれば、つぎのステップ2−9へ進む。判断結果がNoであれば、所定の時間を置いた上で、ステップ2−8を繰り返す。規定時間内に停止しない時はエラーとする。
ついで、制御部7によって、振動のパラメータを変更する。変更後のパラメータも、予めROM81に記憶しておく。
ステップ2−9の動作により、ピペット4が所定の角度だけ回転した場合には、そのような動作を引き起こしたときの振動波(この振動波が第二の振動波に相当する)を再現するためのパラメータを記憶部8のRAM82に記憶する。ステップ2−10における判断も、制御部7が、カメラ10で取得された画像に基づいて行う。第二の振動波を再現するためのパラメータとは、例えば、振動の振幅値や周波数であるが、これ以外の情報をさらに含んでいても良い。なお、ステップ2−10の判断において用いる所定の角度も予めROM81に記憶しておく。ピペット4が所定の角度だけ回転しない場合は、パラメータをそのままとするか、あるいは変更した上で、振動を継続する。
つぎに、本実施形態の装置を用いて検体の動作を制御する方法について、図4を参照しながら説明する。
まず、液体2の中に検体3を投入する。ついで、ピペット4の先端と検体3とを含む画像を、カメラ10により取得する。ついで、この画像を解析して、これらの位置を制御部7により解析し、結果を記憶部8のRAM82に格納する。
ついで、ピペット4の先端と検体3との距離が、規定値以内であるかどうかを、制御部7により判断する。規定値は、予めROM81に記憶しておく。判断がNoであればステップ4−3に進み、Yesであればステップ4−4に進む。
ついで、制御部7によりロボット6を移動させて、ピペット4の先端を検体3に接近させる(図5参照)。その後、再びステップ4−2の判断及びその後の動作を行う。
ステップ4−2の判断がYes、つまり、ピペット4の先端と検体3との距離が既定値以内であれば、制御部7は、記憶部8に記憶されたパラメータ(第一の振動波を生成するためのパラメータ)に基づいて振動信号を生成し、これを振動部5に送る。振動部5は、第一の振動波を生成し、この振動波に基づいて、液体2に波動を生じて、ピペット4が振動する。ここで、第一の振動波は、前記した通り、検体3を接近させるものである。
ついで、検体3を所定の位置に捕捉できたかどうかを、制御部7により判断する。この判断は、カメラ10で取得された画像に基づいて行うことができる。
ついで、制御部7は、記憶部8に記憶された別のパラメータ(第二の振動波を生成するためのパラメータ)に基づいて振動信号を生成し、これを振動部5に送る。振動部5は、第二の振動波を生成し、この振動に基づいて、ピペット4を振動させる。前記した通り、第二の振動波は、検体3を回転させるものである。
ついで、制御部7は、検体3が所定の角度(姿勢)であるかどうかを判断する。所定の角度は予めROM81に記憶しておく。また、この判断は、カメラ10で取得した画像に基づいて行うことができる。
ステップ4−8における判断がNoであれば、ピペット4の振動パラメータを手動または自動で変更し、変更後のパラメータに基づいて振動を行い(ステップ4−7)、再びステップ4−8に進む。
ステップ4−8における判断がYesであれば、検体3をその位置で固定し、検体3に対する必要な処理を行う。検体を固定する手段は従来と同様でよい。
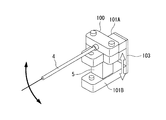
次に、振動部5の具体的構造の一例を示す。図6において、ピペット(具体的にはホールディングピペット)4は、ピペット取り付け台100に装着され、このピペット取り付け台100は基台101Aに保持される。この基台101Aは、ピエゾ素子(圧電素子)である振動部5を介して、別の基台101Bに取り付けられる。基台101Aと基台101Bは、さらに、弾性材料、例えばリン青銅板103によって、片持ち状に固定される。
前記実施形態の図3で説明した検体の動きを、図8を参照しながら、さらに具体的に説明する。この実施例2では、検体として卵子が用いられている。ピペット4が、検体(卵子)3を捕捉できる範囲Pに移動すると、ピペット4の振動により、検体3が容器1(シャーレ)の位置Bから位置Cのように移動して近づき、更に、位置Dまで引き込まれる。続いて、前記実施形態において説明したように、検体3は、回転運動を行う。
2 液体
3 検体
4 ピペット
5 振動部
6 ロボット
7 制御部
8 記憶部
81 ROM
82 RAM
9 レンズ
10 カメラ
11 キャプチャボード
12 表示部
13 I/Oインタフェース
Claims (8)
- ピペットと、振動部と、制御部と、記憶部とを備え、
前記ピペットの少なくとも一部は、液体の内部に配置されるものであり、
前記振動部は、前記ピペットを振動させる構成となっており、
前記制御部は、前記振動部に対して、前記ピペットを振動させるための振動信号を供給する構成となっており、
前記記憶部は、前記振動信号を生成するためのパラメータを記憶する構成となっており、
前記パラメータは、前記ピペットから所定距離内にある検体を引き寄せる波動を前記液体内において発生させる第一の振動波を生成するための情報と、引き寄せられた検体を回転させる波動を発生させる第二の振動波を生成するための情報とを含んでいる
ことを特徴とする検体動作制御装置。 - 前記第一の振動波を生成するための情報と、前記第二の振動波を生成させるための情報は、少なくとも、振動の振幅および周波数についての情報を含むことを特徴とする請求項1記載の検体動作制御装置。
- 以下のステップを備えることを特徴とする、請求項1記載の検体動作制御装置における検体動作用のパラメータの取得方法:
(1)前記ピペットの位置と検体の位置とを前記記憶部に記憶するステップ;
(2)前記ステップ(1)の後、前記ピペットと前記検体との距離が所定範囲内か否かを前記制御部により判断するステップ;
(3)前記ピペットと前記検体との距離が所定範囲内である場合には、前記ピペットを振動させ、前記検体が前記ピペットに接近した時の第一の振動波を再現するためのパラメータを前記記憶部に記憶するステップ;
(4)前記ステップ(3)の後、前記ピペットを振動させ、前記検体が回転した時の第二の振動波を再現するためのパラメータを前記記憶部に記憶するステップ。 - 請求項1記載の検体動作制御装置を用いて実行される以下のステップを備えることを特徴とする、検体動作制御方法:
(1)前記ピペットの位置と検体の位置とを前記記憶部に記憶するステップ;
(2)前記ステップ(1)の後、前記ピペットと前記検体との距離が所定範囲内か否かを前記制御部により判断するステップ;
(3)前記ピペットと前記検体との距離が所定範囲内である場合には、前記記憶部に記憶されたパラメータに基づいて、第一の振動波を生成し、前記ピペットを振動させて、前記検体を前記ピペットに接近させるステップ;
(4)前記ステップ(3)の後、前記憶部に記憶されたパラメータに基づいて、第二の振動波を生成し、前記ピペットを振動させて、前記検体を回転させるステップ。 - 前記振動部としてピエゾ素子が用いられていることを特徴とする請求項1又は2に記載の検体動作制御装置。
- 前記ピペットは、振動部に取り付けられており、前記振動部は、少なくともX及びY方向に移動するロボットに取り付けられていることを特徴とする請求項5記載の検体動作制御装置。
- 以下のステップを備えることを特徴とする、請求項1記載の検体動作制御装置における検体動作用のパラメータの取得方法:
(1)前記ピペットと検体との距離が所定範囲内か否かを前記制御部により判断するステップ;
(2)前記ピペットと前記検体との距離が所定範囲内である場合には、前記ピペットを振動させ、前記検体が前記ピペットに接近した時の第一の振動波を再現するためのパラメータを前記記憶部に記憶するステップ;
(3)前記ステップ(2)の後、前記ピペットを振動させ、前記検体が回転した時の第二の振動波を再現するためのパラメータを前記記憶部に記憶するステップ。 - 請求項1記載の検体動作制御装置を用いて実行される以下のステップを備えることを特徴とする、検体動作制御方法:
(1)前記ピペットと検体との距離が所定範囲内か否かを前記制御部により判断するステップ;
(2)前記ピペットと前記検体との距離が所定範囲内である場合には、前記記憶部に記憶されたパラメータに基づいて、第一の振動波を生成し、前記ピペットを振動させて、前記検体を前記ピペットに接近させるステップ;
(3)前記ステップ(2)の後、前記憶部に記憶されたパラメータに基づいて、第二の振動波を生成し、前記ピペットを振動させて、前記検体を回転させるステップ。
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2004239482 | 2004-08-19 | ||
| JP2004239482 | 2004-08-19 | ||
| PCT/JP2005/002584 WO2006018913A1 (ja) | 2004-08-19 | 2005-02-18 | 検体動作制御装置、検体動作用のパラメータの取得方法、及び検体動作制御方法 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JPWO2006018913A1 JPWO2006018913A1 (ja) | 2008-05-01 |
| JP4660772B2 true JP4660772B2 (ja) | 2011-03-30 |
Family
ID=35907310
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2006531248A Active JP4660772B2 (ja) | 2004-08-19 | 2005-02-18 | 検体動作制御装置、検体動作用のパラメータの取得方法、及び検体動作制御方法 |
Country Status (4)
| Country | Link |
|---|---|
| US (1) | US7726210B2 (ja) |
| JP (1) | JP4660772B2 (ja) |
| CA (1) | CA2577280C (ja) |
| WO (1) | WO2006018913A1 (ja) |
Families Citing this family (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP4677555B2 (ja) * | 2005-04-07 | 2011-04-27 | 国立大学法人電気通信大学 | 検体動作制御装置及び方法 |
| US20080244380A1 (en) * | 2007-03-27 | 2008-10-02 | Canon Kabushiki Kaisha | Method and device for evaluating an expression on elements of a structured document |
| US9042013B2 (en) | 2010-06-03 | 2015-05-26 | Alessi Technologies, Llc | System and method for mounting a specimen on a slide |
| US9052522B2 (en) | 2010-06-03 | 2015-06-09 | Alessi Technologies, Llc | System and method for mounting a specimen on a slide |
| JP5896104B2 (ja) * | 2011-06-24 | 2016-03-30 | 国立大学法人佐賀大学 | 細胞の立体構造体製造装置 |
| CN108303793B (zh) * | 2018-01-12 | 2020-05-05 | 北京理工大学 | 一种用于移动和旋转微小球状物体的装置及方法 |
Citations (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS63208762A (ja) * | 1987-02-25 | 1988-08-30 | Hitachi Ltd | 微粒子取扱い装置 |
| JPH0747259A (ja) * | 1992-12-02 | 1995-02-21 | Hitachi Ltd | 超音波による流体中の微粒子処理装置 |
| JP2001239500A (ja) * | 2000-02-25 | 2001-09-04 | Toshiro Higuchi | 位置決め装置および位置決め方法 |
| WO2001072951A1 (fr) * | 2000-03-28 | 2001-10-04 | School Juridical Person Nihon University | Dispositif et procede servant a commander le deplacement d'un specimen et procede servant a traiter un specimen |
| JP2003241109A (ja) * | 2002-02-20 | 2003-08-27 | Olympus Optical Co Ltd | マイクロマニピュレータ |
| JP2004283926A (ja) * | 2003-03-19 | 2004-10-14 | Canon Inc | マニピュレータ |
Family Cites Families (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| FR2810407B1 (fr) * | 2000-06-16 | 2002-08-02 | Philippe Escal | Appareil pour l'analyse d'echantillons |
-
2005
- 2005-02-18 CA CA2577280A patent/CA2577280C/en not_active Expired - Fee Related
- 2005-02-18 WO PCT/JP2005/002584 patent/WO2006018913A1/ja active Application Filing
- 2005-02-18 US US11/573,871 patent/US7726210B2/en not_active Expired - Fee Related
- 2005-02-18 JP JP2006531248A patent/JP4660772B2/ja active Active
Patent Citations (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS63208762A (ja) * | 1987-02-25 | 1988-08-30 | Hitachi Ltd | 微粒子取扱い装置 |
| JPH0747259A (ja) * | 1992-12-02 | 1995-02-21 | Hitachi Ltd | 超音波による流体中の微粒子処理装置 |
| JP2001239500A (ja) * | 2000-02-25 | 2001-09-04 | Toshiro Higuchi | 位置決め装置および位置決め方法 |
| WO2001072951A1 (fr) * | 2000-03-28 | 2001-10-04 | School Juridical Person Nihon University | Dispositif et procede servant a commander le deplacement d'un specimen et procede servant a traiter un specimen |
| JP2003241109A (ja) * | 2002-02-20 | 2003-08-27 | Olympus Optical Co Ltd | マイクロマニピュレータ |
| JP2004283926A (ja) * | 2003-03-19 | 2004-10-14 | Canon Inc | マニピュレータ |
Also Published As
| Publication number | Publication date |
|---|---|
| WO2006018913A1 (ja) | 2006-02-23 |
| US20080257074A1 (en) | 2008-10-23 |
| JPWO2006018913A1 (ja) | 2008-05-01 |
| CA2577280C (en) | 2012-01-03 |
| US7726210B2 (en) | 2010-06-01 |
| CA2577280A1 (en) | 2006-02-23 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP4660772B2 (ja) | 検体動作制御装置、検体動作用のパラメータの取得方法、及び検体動作制御方法 | |
| JP5928900B2 (ja) | マニピュレータシステム及び微小操作対象物の操作方法 | |
| JP6411735B2 (ja) | 塗布部材、塗布装置および塗布方法 | |
| JP2009202331A (ja) | マニピュレータ、マニピュレータの駆動方法、マニピュレータシステム及び微小操作対象物の操作方法 | |
| JP2013160960A (ja) | マニピュレータシステム及び微小操作対象物の操作方法 | |
| JP2007205856A (ja) | 走査型プローブ装置 | |
| JP5044290B2 (ja) | 微細加工粉除去装置及び微細加工装置並びに微細加工粉除去方法 | |
| JP2009078345A (ja) | マニピュレータ、マニピュレータシステム、マニピュレータ用画像表示装置及びマニピュレーションシステム | |
| JP4427824B2 (ja) | プローブの製造方法、プローブおよび走査型プローブ顕微鏡 | |
| JP2009211027A (ja) | マニピュレータシステム及び微小操作対象物の操作方法 | |
| JP2007271358A (ja) | プローブホルダ及び走査型プローブ顕微鏡 | |
| WO2015050205A1 (ja) | マニピュレータシステム及び微小操作対象物の操作方法 | |
| WO2019230635A1 (ja) | マニピュレーションシステム及びマニピュレーションシステムの駆動方法 | |
| JP5126675B2 (ja) | マニピュレータシステム | |
| JP5668571B2 (ja) | アクチュエータを用いた細胞の操作方法 | |
| JP5024657B2 (ja) | マニピュレータ | |
| JP2006153574A (ja) | 原子間力顕微鏡 | |
| US6959614B2 (en) | Apparatus for controlling movement of specimen, method for controlling movement of specimen, and method for processing specimen | |
| JPH06342121A (ja) | マイクロマニピュレータ | |
| JP4677555B2 (ja) | 検体動作制御装置及び方法 | |
| JP2005349496A (ja) | 基板上に微小物質を堆積させる方法 | |
| JP4555958B2 (ja) | 微細操作用マイクロマニピュレーション装置 | |
| JP6270425B2 (ja) | 位置決め装置、顕微鏡システム、及び付着物除去方法 | |
| Seyfried et al. | Microrobot-based microassembly station and its control using a graphical user interface | |
| JP2022131352A (ja) | 細胞塊の採取装置及び細胞塊の採取方法 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20080121 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20101005 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20101108 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20101207 |
|
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 |
|
| R150 | Certificate of patent or registration of utility model |
Free format text: JAPANESE INTERMEDIATE CODE: R150 |