JP4635779B2 - データ処理装置およびデータ処理方法、並びにプログラム - Google Patents
データ処理装置およびデータ処理方法、並びにプログラム Download PDFInfo
- Publication number
- JP4635779B2 JP4635779B2 JP2005237575A JP2005237575A JP4635779B2 JP 4635779 B2 JP4635779 B2 JP 4635779B2 JP 2005237575 A JP2005237575 A JP 2005237575A JP 2005237575 A JP2005237575 A JP 2005237575A JP 4635779 B2 JP4635779 B2 JP 4635779B2
- Authority
- JP
- Japan
- Prior art keywords
- pixel
- region
- image data
- value
- horizontal
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
Images











Classifications
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T5/00—Image enhancement or restoration
- G06T5/70—Denoising; Smoothing
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T5/00—Image enhancement or restoration
- G06T5/20—Image enhancement or restoration using local operators
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T7/00—Image analysis
- G06T7/10—Segmentation; Edge detection
- G06T7/136—Segmentation; Edge detection involving thresholding
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N19/00—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals
- H04N19/10—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using adaptive coding
- H04N19/102—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using adaptive coding characterised by the element, parameter or selection affected or controlled by the adaptive coding
- H04N19/117—Filters, e.g. for pre-processing or post-processing
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N19/00—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals
- H04N19/10—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using adaptive coding
- H04N19/134—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using adaptive coding characterised by the element, parameter or criterion affecting or controlling the adaptive coding
- H04N19/136—Incoming video signal characteristics or properties
- H04N19/14—Coding unit complexity, e.g. amount of activity or edge presence estimation
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N19/00—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals
- H04N19/10—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using adaptive coding
- H04N19/169—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using adaptive coding characterised by the coding unit, i.e. the structural portion or semantic portion of the video signal being the object or the subject of the adaptive coding
- H04N19/17—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using adaptive coding characterised by the coding unit, i.e. the structural portion or semantic portion of the video signal being the object or the subject of the adaptive coding the unit being an image region, e.g. an object
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N19/00—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals
- H04N19/10—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using adaptive coding
- H04N19/169—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using adaptive coding characterised by the coding unit, i.e. the structural portion or semantic portion of the video signal being the object or the subject of the adaptive coding
- H04N19/182—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using adaptive coding characterised by the coding unit, i.e. the structural portion or semantic portion of the video signal being the object or the subject of the adaptive coding the unit being a pixel
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N19/00—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals
- H04N19/85—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using pre-processing or post-processing specially adapted for video compression
- H04N19/86—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using pre-processing or post-processing specially adapted for video compression involving reduction of coding artifacts, e.g. of blockiness
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T2207/00—Indexing scheme for image analysis or image enhancement
- G06T2207/20—Special algorithmic details
- G06T2207/20004—Adaptive image processing
- G06T2207/20012—Locally adaptive
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T2207/00—Indexing scheme for image analysis or image enhancement
- G06T2207/20—Special algorithmic details
- G06T2207/20172—Image enhancement details
- G06T2207/20192—Edge enhancement; Edge preservation
Landscapes
- Engineering & Computer Science (AREA)
- Multimedia (AREA)
- Signal Processing (AREA)
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Theoretical Computer Science (AREA)
- Computer Vision & Pattern Recognition (AREA)
- Image Processing (AREA)
- Compression Or Coding Systems Of Tv Signals (AREA)
- Facsimile Image Signal Circuits (AREA)
- Picture Signal Circuits (AREA)
- Image Analysis (AREA)
Description
・・・(3)
・・・(4)
Claims (4)
- 画像データを処理するデータ処理装置において、
前記画像データを構成する画素ごとに、画素値の散らばりの度合いを表す分散情報を計算する分散情報計算手段と、
前記分散情報を平滑化し、平滑化値を出力する平滑化手段と、
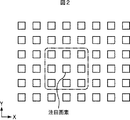
前記画像データを構成する画素のうちの、注目している注目画素を含む、前記注目画素の周辺に位置する画素の前記平滑化値の変化量を計算する変化量計算手段と、
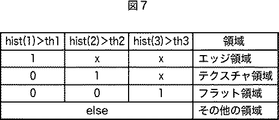
前記変化量のヒストグラムを計算するヒストグラム計算手段と、
前記ヒストグラムに基づいて、前記注目画素が属する領域を判定し、その領域を表す領域情報を出力する領域判定手段と、
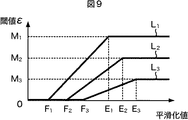
前記領域情報と前記平滑化値とに基づいて、前記画像データを構成する画素ごとに、ノイズ除去処理のパラメータを決定するパラメータ決定手段と、
前記画素ごとに決定された前記パラメータに基づき、前記画像データに前記ノイズ除去処理を施すノイズ除去手段と
を備えることを特徴とするデータ処理装置。 - 前記判定手段は、前記画素が属する領域が、エッジ領域、テクスチャ領域、またはフラット領域のうちのいずれであるかを判定する
ことを特徴とする請求項1に記載のデータ処理装置。 - 画像データを処理するデータ処理方法において、
前記画像データを構成する画素ごとに、画素値の散らばりの度合いを表す分散情報を計算する分散情報計算ステップと、
前記分散情報を平滑化し、平滑化値を出力する平滑化ステップと、
前記画像データを構成する画素のうちの、注目している注目画素を含む、前記注目画素の周辺に位置する画素の前記平滑化値の変化量を計算する変化量計算ステップと、
前記変化量のヒストグラムを計算するヒストグラム計算ステップと、
前記ヒストグラムに基づいて、前記注目画素が属する領域を判定し、その領域を表す領域情報を出力する領域判定ステップと、
前記領域情報と前記平滑化値とに基づいて、前記画像データを構成する画素ごとに、ノイズ除去処理のパラメータを決定するパラメータ決定ステップと、
前記画素ごとに決定された前記パラメータに基づき、前記画像データに前記ノイズ除去処理を施すノイズ除去ステップと
を含むことを特徴とするデータ処理方法。 - 画像データを処理するデータ処理をコンピュータに実行させるプログラムにおいて、
前記画像データを構成する画素ごとに、画素値の散らばりの度合いを表す分散情報を計算する分散情報計算ステップと、
前記分散情報を平滑化し、平滑化値を出力する平滑化ステップと、
前記画像データを構成する画素のうちの、注目している注目画素を含む、前記注目画素の周辺に位置する画素の前記平滑化値の変化量を計算する変化量計算ステップと、
前記変化量のヒストグラムを計算するヒストグラム計算ステップと、
前記ヒストグラムに基づいて、前記注目画素が属する領域を判定し、その領域を表す領域情報を出力する領域判定ステップと、
前記領域情報と前記平滑化値とに基づいて、前記画像データを構成する画素ごとに、ノイズ除去処理のパラメータを決定するパラメータ決定ステップと、
前記画素ごとに決定された前記パラメータに基づき、前記画像データに前記ノイズ除去処理を施すノイズ除去ステップと
を含むことを特徴とするプログラム。
Priority Applications (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2005237575A JP4635779B2 (ja) | 2005-08-18 | 2005-08-18 | データ処理装置およびデータ処理方法、並びにプログラム |
| US11/504,041 US7657114B2 (en) | 2005-08-18 | 2006-08-15 | Data processing apparatus, data processing method, and program |
| CNB2006101114310A CN100525382C (zh) | 2005-08-18 | 2006-08-18 | 数据处理设备和数据处理方法 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2005237575A JP4635779B2 (ja) | 2005-08-18 | 2005-08-18 | データ処理装置およびデータ処理方法、並びにプログラム |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2007053618A JP2007053618A (ja) | 2007-03-01 |
| JP4635779B2 true JP4635779B2 (ja) | 2011-02-23 |
Family
ID=37738460
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2005237575A Expired - Fee Related JP4635779B2 (ja) | 2005-08-18 | 2005-08-18 | データ処理装置およびデータ処理方法、並びにプログラム |
Country Status (3)
| Country | Link |
|---|---|
| US (1) | US7657114B2 (ja) |
| JP (1) | JP4635779B2 (ja) |
| CN (1) | CN100525382C (ja) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US9704222B2 (en) | 2013-06-26 | 2017-07-11 | Olympus Corporation | Image processing apparatus |
Families Citing this family (23)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR100901354B1 (ko) * | 2007-05-31 | 2009-06-05 | 주식회사 코아로직 | 영상의 에지 보정장치 및 그 방법 |
| JP4967921B2 (ja) * | 2007-08-10 | 2012-07-04 | セイコーエプソン株式会社 | 画像処理のための装置、方法、および、プログラム |
| CN101605254B (zh) | 2008-06-13 | 2011-09-07 | 深圳Tcl新技术有限公司 | 减少视频区块效应的系统和方法 |
| US10123050B2 (en) * | 2008-07-11 | 2018-11-06 | Qualcomm Incorporated | Filtering video data using a plurality of filters |
| CN102132566B (zh) * | 2008-10-07 | 2015-05-20 | 株式会社Ntt都科摩 | 图像加工装置及方法、动态图像编码装置及方法、动态图像解码装置及方法、以及编码解码系统和方法 |
| GB2468304A (en) * | 2009-03-03 | 2010-09-08 | Sharp Kk | Video image processing method that smooths the jagged diagonal edges created by epsilon filtering |
| JP4585602B1 (ja) * | 2009-09-18 | 2010-11-24 | 株式会社東芝 | 画像処理装置、表示装置及び画像処理方法 |
| CN102202217A (zh) * | 2010-03-22 | 2011-09-28 | 北京中星微电子有限公司 | 一种jpeg编码方法和设备 |
| US8693801B2 (en) * | 2010-09-28 | 2014-04-08 | Panasonic Corporation | Image processing device, image processing method, and integrated circuit |
| US8879000B2 (en) * | 2010-12-22 | 2014-11-04 | Broadcom Corporation | Method and system for detecting analog noise in the presence of mosquito noise |
| JP5834728B2 (ja) * | 2011-09-30 | 2015-12-24 | 大日本印刷株式会社 | 雑音除去装置 |
| JP5751184B2 (ja) * | 2012-01-31 | 2015-07-22 | Nkワークス株式会社 | 画像処理プログラム、画像処理装置および画像処理方法 |
| JP5399578B2 (ja) | 2012-05-16 | 2014-01-29 | シャープ株式会社 | 画像処理装置、動画像処理装置、映像処理装置、画像処理方法、映像処理方法、テレビジョン受像機、プログラム、及び記録媒体 |
| JP5564553B2 (ja) * | 2012-10-22 | 2014-07-30 | Eizo株式会社 | 画像処理装置、画像処理方法及びコンピュータプログラム |
| US9639771B2 (en) * | 2013-09-06 | 2017-05-02 | Sharp Kabushiki Kaisha | Image processing device |
| JP6338408B2 (ja) * | 2014-03-14 | 2018-06-06 | 三菱電機株式会社 | 画像符号化装置、画像復号装置、画像符号化方法及び画像復号方法 |
| US10134121B2 (en) * | 2015-03-10 | 2018-11-20 | Beamr Imaging Ltd | Method and system of controlling a quality measure |
| US20190220956A1 (en) * | 2018-01-12 | 2019-07-18 | Megvii Technology Llc | Image processing method, image processing device and nonvolatile storage medium |
| DE112018007258T5 (de) * | 2018-04-12 | 2020-12-10 | Mitsubishi Electric Corporation | Bildverarbeitungsvorrichtung, Bildverarbeitungsverfahren und Bildverarbeitungsprogramm |
| CN108765312B (zh) * | 2018-04-27 | 2021-11-02 | 西安科技大学 | 一种基于方差信息的图像去噪方法 |
| CN110400338B (zh) * | 2019-07-11 | 2022-02-18 | Oppo广东移动通信有限公司 | 深度图处理方法、装置和电子设备 |
| KR20220010297A (ko) * | 2020-07-17 | 2022-01-25 | 에스케이하이닉스 주식회사 | 엣지 기반 샤프니스 세기 제어 회로, 이미지 센싱 장치 및 그 동작방법 |
| CN115731276A (zh) * | 2021-08-25 | 2023-03-03 | 北京小米移动软件有限公司 | 图像处理方法、装置、终端及存储介质 |
Family Cites Families (10)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH04188948A (ja) * | 1990-11-22 | 1992-07-07 | Canon Inc | 画像処理装置 |
| DE69230548T2 (de) * | 1991-08-23 | 2000-06-15 | Mitsubishi Denki K.K., Tokio/Tokyo | Pixelinterpolationsschaltkreis und Anwendungen |
| JP4288805B2 (ja) * | 1999-12-28 | 2009-07-01 | ソニー株式会社 | 映像信号再生装置 |
| JP4415236B2 (ja) | 2000-02-07 | 2010-02-17 | ソニー株式会社 | 画像処理装置及び画像処理方法 |
| US6842538B2 (en) * | 2001-03-23 | 2005-01-11 | Shih-Jong J. Lee | Automatic detection of alignment or registration marks |
| US6859565B2 (en) * | 2001-04-11 | 2005-02-22 | Hewlett-Packard Development Company, L.P. | Method and apparatus for the removal of flash artifacts |
| US7003173B2 (en) * | 2001-06-12 | 2006-02-21 | Sharp Laboratories Of America, Inc. | Filter for combined de-ringing and edge sharpening |
| US7003174B2 (en) * | 2001-07-02 | 2006-02-21 | Corel Corporation | Removal of block encoding artifacts |
| JP4042563B2 (ja) * | 2002-12-27 | 2008-02-06 | セイコーエプソン株式会社 | 画像ノイズの低減 |
| JP4072491B2 (ja) * | 2003-10-23 | 2008-04-09 | キヤノン株式会社 | 画像処理装置、画像処理方法、プログラム及びコンピュータ可読媒体 |
-
2005
- 2005-08-18 JP JP2005237575A patent/JP4635779B2/ja not_active Expired - Fee Related
-
2006
- 2006-08-15 US US11/504,041 patent/US7657114B2/en not_active Expired - Fee Related
- 2006-08-18 CN CNB2006101114310A patent/CN100525382C/zh not_active Expired - Fee Related
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US9704222B2 (en) | 2013-06-26 | 2017-07-11 | Olympus Corporation | Image processing apparatus |
Also Published As
| Publication number | Publication date |
|---|---|
| CN100525382C (zh) | 2009-08-05 |
| CN1917578A (zh) | 2007-02-21 |
| US7657114B2 (en) | 2010-02-02 |
| JP2007053618A (ja) | 2007-03-01 |
| US20070110329A1 (en) | 2007-05-17 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP4635779B2 (ja) | データ処理装置およびデータ処理方法、並びにプログラム | |
| JP5839631B2 (ja) | ブロックノイズの検出方法 | |
| JP5071721B2 (ja) | 画像処理装置および方法、並びにプログラム | |
| KR101499927B1 (ko) | 불규칙성을 제거하기 위해 이미지들의 에지들을 평활화하는 시스템, 방법 및 장치 | |
| JP6101817B2 (ja) | 画像高画質化装置、画像表示装置、画像高画質化方法及びコンピュータプログラム | |
| JP4577583B2 (ja) | 画像処理装置および画像処理方法、プログラム、並びに、記録媒体 | |
| Yu et al. | A new edge detection approach based on image context analysis | |
| US20120189208A1 (en) | Image processing apparatus, image processing method, image processing program, and storage medium | |
| JP6150899B2 (ja) | 画像高画質化装置、画像表示装置、画像高画質化方法及びコンピュータプログラム | |
| JP2008278185A (ja) | データ処理装置およびデータ処理方法、並びにプログラム | |
| CN102760284A (zh) | 系数学习装置和方法、图像处理装置和方法、程序以及记录介质 | |
| CN101377849A (zh) | 图像处理方法与图像处理装置 | |
| Hong et al. | Image interpolation using interpolative classified vector quantization | |
| JP4392582B2 (ja) | 信号処理装置および信号処理方法、並びにプログラム | |
| JP3628564B2 (ja) | 帯域制限方法、フィルタ装置、および帯域制限プログラムを記録した記録媒体 | |
| JP2010211552A (ja) | 画像処理方法及びコンピュータプログラム | |
| JP5807420B2 (ja) | 映像ノイズ低減装置及び映像ノイズ低減方法 | |
| JPH1166292A (ja) | ノイズ低減装置 | |
| JPH096962A (ja) | 鮮鋭度の評価方法 | |
| KR100643229B1 (ko) | 디스플레이장치 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20080805 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20100806 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20100812 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20101006 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20101026 |
|
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20101108 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20131203 Year of fee payment: 3 |
|
| R151 | Written notification of patent or utility model registration |
Ref document number: 4635779 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R151 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20131203 Year of fee payment: 3 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| LAPS | Cancellation because of no payment of annual fees |