次に、添付図面を参照して、本発明による歩行装置の種々の実施形態について説明する。
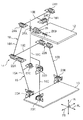
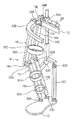
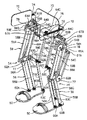
先ず、図1を参照すると、そこには、本発明による歩行装置の第1の実施形態が図示され、この歩行装置は二足歩行ロボットの右脚を構成する。なお、図1には図示されないが、二足歩行ロボットの左脚の歩行装置についてはその垂直中心軸線に対して該右脚の歩行装置の対象構造となる。
図1では、歩行装置を構成する主要な構成要素は象徴化されて図示され、その象徴化された構成要素について解説する。歩行装置は多数のリンク部材から成り、個々のリンク部材は太目の実線で図示される。また、多数のリンク部材は3つのタイプの関節継手、即ち一軸関節継手、二軸関節継手及び全方向継手によって適宜連結される。
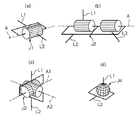
一軸関節継手は図2(a)に参照符号J1で示すように象徴化され、この一軸関節継手J1によって2つのリンクL1及びL2が連結されたとき、リンクL1及びL2は一軸関節継手J1の回動軸線Aの回りで互いに回動し得る。また、一軸関節継手は図2(b)に参照符号J2で示すようにも象徴化され、この一軸関節継手J2によって連結された3つのリンク部材L1、L2及びL3は一軸関節継手J2の回動軸線Aの回りで回動させられる。なお、双方の一軸関節継手J1及びJ2の代表的な形態としては、2つ以上のリンク部材の端部に挿通させられたピボット軸を挙げることができる。
また、二軸関節継手は図2(c)に参照符号J3で示すように象徴化され、この二軸関節継手J3によって2つのリンクL1及びL2が連結されたとき、リンクL1及びL2は二軸関節継手J3の互いに直交する2つの回動軸線A1及びA2の回りで互いに回動し得る。二軸関節継手J3の代表的な例としては、ユニバーサル継手が挙げられる。
更に、全方向継手は図2(d)に参照符号J4で示すように象徴化され、この全方向関節継手J4によって連結された2つのリンクL1及びL2は互いに全方向に対して回動し得る。全方向継手の代表的な形態としては、スイベル継手及びボール継手等が挙げられる。
図1に示す歩行装置には駆動源として2つのタイプのアクチュエータ、即ち直線駆動アクチュエータ及び回転駆動アクチュエータが用いられる。
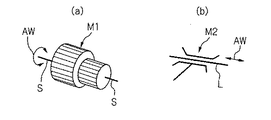
回転駆動アクチュエータは図3(a)に参照符号M1で示すように象徴化され、この回転駆動アクチュエータM1によりその出力シャフトSは矢印AWで示す回転方向のいずれかの向きに選択的に駆動させられる。回転駆動アクチュエータの代表的な形態としては、適当な電動モータ例えばサーボモータやステッピングモータ、流体回転モータ等が挙げられる。
直線駆動アクチュエータは図3(b)に参照符号M2で示すように象徴化され、この直線駆動アクチュエータM2によりリンク部材Lは矢印AWで示すようにその長さ方向に沿ういずれかの向きに選択的に駆動させられる。直線駆動アクチュエータM2の代表的な形態としては、流体シリンダ、電磁ソレノイド等が挙げられる。また、回転駆動力を直線駆動力に変換する機構例えばボールねじ機構、ラックピニオン機構、往復スライダクランク機構等を回転駆動アクチュエータに組み込んだものを直線駆動アクチュエータとして使用することもできる。なお、図3(b)の例では、直線駆動アクチュエータM2はリンク部材Lをその長さ方向に沿って駆動させるものとして説明されているが、図3(a)に示すような回転駆動アクチュエータM1をその出力シャフトSの長さ方向に駆動させるためにも使用され得るものである。
再び図1に戻って本発明による歩行装置の第1の実施形態について説明すると、この歩行装置は足部10と、腰部12と、その間に設けられた脚部14とを具備する。足部10及び腰部12は適当な剛性材料から形成される。脚部14は下腿部リンク機構16及び大腿部リンク機構18から成る。なお、図1では、足部10及び腰部12はそれぞれ足部板及び腰部板として図示される。
下腿部リンク機構16は3つのリンク部材16A、16B及び16Cを包含し、これらリンク部材16A、16B及び16Cのそれぞれの下端は二軸関節継手20A、20B及び20Cを介して足部板10上に適宜に固着される。図1から明らかなように、二軸関節継手20A、20B及び20Cの各々はその互いに直交する回動軸線が矢印FBで示される前後方向及び矢印RLで示される左右方向にそれぞれ延在するように配置され、このとき二軸関節継手20A及び20Bの双方の前後方向の回動軸線は互いに同軸とされ、二軸関節継手20A及び20Cの双方の左右方向の回動軸線は互いに同軸とされる。
大腿部リンク機構18は3つのリンク部材18A、18B及び18Cを包含する。リンク部材18A及び18Bのそれぞれの下端は一軸関節継手22A及び22Bを介してリンク部材16A及び16Bの上端に連結され、このとき一軸関節継手22A及び22Bの各々はその回動軸線が矢印RLで示される左右方向に延在するように配置される。リンク部材18Cの下端は全方向関節継手22Cを介してリンク部材16Aにその上端側に接近した個所で適宜固着されると共にリンク部材18Cはその下端側に接近した個所で二軸関節継手22Dを介して駆動リンク部材16Cの上端に適宜固着され、このとき二軸関節継手22Dはその互いに直交する回動軸線が矢印FBで示される前後方向及び矢印RLで示される左右方向にそれぞれ延在するように配置される。
大腿部リンク機構18はリンク部材18A、18B及び18Cに加えて更に2つのリンク部材18D及び18Eを包含する。リンク部材18Dの両端のそれぞれは上述の一軸関節継手22A及び22Bを介してリンク部材18A及び18Bの下端に連結される。リンク部材18Eの両端のそれぞれは一軸関節継手24A及び24Bを介してリンク部材18A及び18Bの上端に連結され、このとき一軸関節継手24A及び24Bの各々はその回動軸線が矢印RLで示される左右方向に延在するように配置される。
図1に示すように、大腿部リンク機構18のリンク部材18Cの上端側には直線駆動アクチュエータ26Aが設けられ、これによりリンク部材18Cはその長さ方向に沿って駆動させられる。直線駆動アクチュエータ26Aは回転駆動アクチュエータ28の一方の出力シャフトに固着され、このとき回転駆動アクチュエータ28はその双方の出力シャフトが矢印RLで示される左右方向に延在するように配置される。また、回転駆動アクチュエータ28の他方の出力シャフトには直線駆動アクチュエータ26Bが設けられ、この直線駆動アクチュエータ26Bは腰部板12に適宜固着される。要するに、リンク部材18Cは直線駆動アクチュエータ26Aでその長さ方向に沿って駆動させられると共に回転駆動アクチュエータ28によってその出力シャフトの回りで回動させられ、しかも直線駆動アクチュエータ26Bにより回転駆動アクチュエータ28は矢印RLで示される左右方向に沿って駆動させられ、その結果リンク部材18Cも左右方向(RL)に沿って移動させられる。
大腿部リンク機構18のリンク部材18Eの中間部は一軸関節継手24Cを介して腰部板12に適宜固着され、このとき一軸関節継手24Cはその回動軸線が矢印RLで示される左右方向に延在するように配置される。即ち、リンク部材18Eは一軸関節継手24Cの回動軸線の回りで回動自在とされる。
本実施形態では、足部板10と、下腿部リンク機構16のリンク部材16A及び16Bと、大腿部リンク機構18のリンク部材18Dとが下腿部側平行四辺形リンク機構を構成し、また大腿部リンク機構18のリンク部材18A、18B、18D及び18Eが大腿部側平行四辺形リンク機構を構成する。図1に示す歩行装置を人間の右脚に譬えるとすると、下腿部側平行四辺形リンク機構及び大腿部側平行四辺形機構はそれぞれの下腿骨格及び大腿骨格に対応する。また、3つの二軸関節継手20A、20B及び20Cは足首関節に対応し、2つの一軸関節継手22A及び22Bと、全方向継手22Cと、二軸関節継手22Dとは膝関節に対応し、一軸関節継手24A、24B及び24Cは股関節に対応する。一方、リンク部材16C及び18Cは駆動リンク機構を構成し、リンク部材16Cは駆動リンク部材として下腿筋に対応し、リンク部材18Cは駆動リンク部材として大腿筋に対応する。
即ち、図1に示す歩行装置の構成上の特徴について言及すると、関節継手20A、20B、22A及び22Bは変形自在な平行四辺形の頂点を成し、関節継手22A、22B、24A及び24Bも変形自在な平行四辺形の頂点を成す。更に、図1に示す歩行装置の構成上の特徴としては、関節継手20A、20C、22C及び22Dが変形自在な四辺形の頂点を成すことも挙げられる。
図1に示す歩行装置の構成上の更に別な特徴として、本歩行装置が初期状態にあるとき、即ち足部板10が図1に示すように平坦な地面或いは床面に置かれているとき、一軸関節継手24Aの回転軸線と回転駆動アクチュエータ28の回転軸線とが互いに一致させられている点も挙げられる。なお、本歩行装置の動作時には、駆動リンク部材16Cが直線駆動アクチュエータ26Aにより駆動されて大腿部リンク機構18のリンク部材18Eが一軸関節継手24Cの回動軸線の回りで回動させられると、一軸関節継手24Aの回動軸線と回転駆動アクチュエータ28の回転軸線とは互いに交差することとなる。また、関節継手22A、22C及び24Aは変形自在な三角形の頂点を形成し、駆動リンク部材16C及び18Cを直線駆動アクチュエータ26Aにより駆動しない限り、該三角形は変形されず、膝関節(22A、22B、22C、22D)を曲げることはできない。
以上で説明したような歩行装置の構成によれば、足部板10は腰部板12に対して常に平行状態を維持しつつ、矢印FB、RL及びULのそれぞれで示す前後方向、左右方向及び上下方向に沿って移動することが可能である。
詳述すると、駆動リンク部材18Cがその長さ方向に沿って直線駆動アクチュエータ26Aで駆動させられると、関節継手20A、20B、22A及び22Bによって形成される平行四辺形が関節継手22A、22B、24A及び24Bによって形成される平行四辺形を実質的に変形させることなく変形させられ、これにより足部板10は前後方向(FB)に沿う若干の並進運動を伴ないつつ上下方向(UL)の並進運動を行うことになる。
また、直線駆動アクチュエータ26A(従って、駆動リンク部材18C)が回転駆動アクチュエータ28でその出力シャフトの回りで回転駆動させられると、関節継手22A、22B、24A及び24Bにより形成される平行四辺形が変形させられ、これにより足部板10は腰部板12に対して前後方向(FB)に沿って回動運動を行うことになる。
更に、回転駆動アクチュエータ28(従って、駆動リンク部材18C)がその出力シャフトの軸線方向に沿って直線駆動アクチュエータ36Bで駆動させられると、関節継手20A、20C、22C及び22Dにより形成される平行四辺形が変形させられ、これにより足部板10は上下方向(UL)に沿う若干の並進運動を伴ないつつ左右方向(RL)の並進運動を行うことになる。
要するに、直線駆動アクチュエータ26A及び26B及び回転駆動アクチュエータ28の駆動を選択的に適宜制御することにより、足部板10は腰部板12に対して平行状態を維持しつつ、上下方向(UL)、前後方向(FB)及び左右方向(RL)の三方向に沿って並進運動を行うことになり、これにより歩行装置のスムーズな歩行動作が保証される。勿論、先にも述べたが、二足歩行ロボットの歩行のためには、図1に示す歩行装置の対象構造となる左脚としての歩行装置も必要である。
本発明による歩行装置の第1の実施形態によれば、下腿部リンク機構16及び大腿部リンク機構18のそれぞれには平行四辺形リンク機構が含まれるので、シリアルリンク機構を用いる従来の歩行装置に比べると、一層大きな構造上の強度が得られ、腰部板12上に大きな荷重を担うことが可能である。また、本発明による歩行装置では、3つの駆動アクチュエータ(26A、26B、28)がすべて腰部板12の付近に纏めて設置されるので、従来の歩行装置の構成、即ちシリアルリンク機構の足首関節部、膝関節部に駆動アクチュエータを設けなければならない構成に比べると、本発明による歩行装置では、その設計上の自由度が大幅に改善され得ることになる。
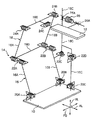
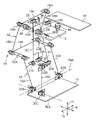
図4を参照すると、図1に示す歩行装置の具体的な構成が図示され、同図では、図1に示す構成要素と同様な構成要素については、同じ参照符号が用いられている。図4に示す歩行装置の補足的な事項について以下に説明する。
先ず、図4に示す歩行装置では、図1に図示された腰部板12に対応する構成要素として、一軸関節継手24Cに枢着された矩形ロッド部材が用いられる。
図4に示す歩行装置では、直線駆動アクチュエータ26Aとして、流体シリンダが用いられ、この流体シリンダ26Aの作動ロッドは駆動リンク部材18Cの一部を成す。なお、図4では、流体シリンダ26Aに加圧流体を供給するための加圧流体配管については省かれている。一方、図4では、直線駆動アクチュエータ26Bは矩形ロッド部材12に沿って摺動自在に装着された摺動板を具備し、この摺動板26Bは矩形ロッド部材12に適宜支持された流体シリンダ(図示されない)の作動ロッドに接続される。また、回転駆動アクチュエータ28については流体回転モータが使用され、この流体回転モータ28の出力シャフトは流体シリンダ26Aに適宜固着される。
図5を参照すると、図1に示す歩行装置と構造的に等価な歩行装置が示され、この歩行装置は例えば歩行機能に障害を持つ障害者の歩行支援装置として用いられるものである。なお、図5では、図1に示す構成要素に対応する構成要素については、同じ参照符号が用いられている。
図5に示す歩行支援装置は歩行機能に障害を持つ障害者の右脚に装着されるようになっており、その右脚の装着のためのスペースを確保するために、駆動リンク機構を構成する駆動リンク部材16C及び18Cは腰部板12の後方側に配置される。詳述すると、二軸関節継手20Cは足部板10の後方側に二軸関節継手20Bと並んで配置され、駆動リンク部材16Cの下端はその後方側の二軸関節継手20Cを介して足部板10上に適宜固着される。また、駆動リンク部材18Cの下端は全方向関節継手22Cを介してリンク部材16Bにその上端側に接近した個所で適宜固着されると共に駆動リンク部材18Cはその下端側に接近した個所で二軸関節継手22Dを介して駆動リンク部材16Cの上端に適宜固着される。図1に示す歩行装置の場合と同様に、図5に示す歩行支援装置でも、足部板10と、下腿部リンク機構16のリンク部材16A及び16Bと、大腿部リンク機構18のリンク部材18Dとが下腿部側平行四辺形リンク機構を構成し、また大腿部リンク機構18のリンク部材18A、18B、18D及び18Eが大腿部側平行四辺形リンク機構を構成する。要するに、関節継手20B、20C、22C及び22Dが変形自在な平行四辺形の頂点を成し、この平行四辺形の変形により腰部板12に対する足部板10の左右方向(RL)の並進運動が保証される。
図1に示す歩行装置の場合と同様に、図5に示す歩行支援装置でも、本歩行支援装置が初期状態にあるとき、即ち足部板10が図5に示すように平坦な地面或いは床面におかれているとき、一軸関節継手24Bの回動軸線と回転駆動アクチュエータ28の回転軸線とが互いに一致させられ、本歩行支援装置の動作時には、駆動リンク部材16Cが直線駆動アクチュエータ26Aにより駆動されて大腿部リンク機構18のリンク部材18Eが一軸関節継手24Cの回動軸線の回りで回動させられると、一軸関節継手24Aの回動軸線と回転駆動アクチュエータ28の回転軸線とは互いに交差することとなる。また、関節継手22B、22C及び24Bは変形自在な三角形の頂点を形成し、駆動リンク部材16Cを直線駆動アクチュエータ26Aにより駆動しない限り、該三角形は変形されず、膝関節(22A、22B、22C、22D)を曲げることはできない。
図6を参照すると、図5に示す歩行支援装置の具体的構成が図示され、同図では、図5に示す構成要素と同様な構成要素については、同じ参照符号が用いられている。図6に示す歩行支援装置の補足的な事項について以下に説明する。
先ず、図6に示す歩行支援装置では、図4に示した歩行装置の場合と同様に、図5に図示された腰部板12に対応する構成要素として、一軸関節継手24Cに枢着された矩形ロッド部材12が用いられる。
図4に示した歩行装置の場合と同様に、図6に示した歩行支援装置でも、直線駆動アクチュエータ26Aとして、流体シリンダが用いられ、この流体シリンダ26Aの作動ロッドは駆動リンク部材18Cの一部を成し、また直線駆動アクチュエータ26Bも矩形ロッド部材12に沿って摺動自在に装着された摺動板を具備するが、図6では、該摺動板は矩形ロッド部材12に隠れて見ることはできない。更に、図4の歩行装置の場合と同様に、回転駆動アクチュエータ28についても流体回転モータが使用され、この流体回転モータ28の出力シャフトは流体シリンダ26Aに適宜固着される。
なお、図6には、歩行機能に障害を持つ障害者の右脚に歩行支援装置を装着させるための装着具が参照符号30A、30B、30C及び30Dで象徴的に図示されているが、これら装着具装着具30A、30B、30C及び30Dは例えば歩行支援装置の適当な個所に取り付けられた装着バンドとして構成され得るものである。
なお、上述した歩行支援装置については健常者が装着してもよく、この場合には歩行支援装置は所謂パワースーツとして機能することになる。
上述したように、本発明による歩行(支援)装置の第1の実施形態にあっては、その歩行動作については、足部板10を常に腰部板12に対して平行状態としつつ、矢印FB、RL及びULのそれぞれで示す前後方向、左右方向及び上下方向に沿って移動させることにより達成させられる。要するに、第1の実施形態においては、足部板10には腰部板12に対する前後方向(FB)、左右方向(RL)及び上下方向(UL)の並進三自由度が与えられるだけなので、歩行(支援)装置の歩行動作は平坦な床面或いは地面だけに限定されることになる。
図7を参照すると、本発明による歩行装置の第2の実施形態が示され、この歩行装置はその歩行動作が起伏(スロープ)や凹凸(小石や窪み等)のある床面或いは地面でも保証されるように構成される。図7でも、図1の場合と同様に、歩行装置を構成する主要な構成要素は図2及び図3を参照して説明したように象徴化されて図示されている。なお、第2の実施形態は図1及び図5に示す第1の実施形態の基本構成を含み、その基本構成の構成要素については同じ参照符号が用いられている。
第2の実施形態では、大腿部リンク機構18の駆動リンク部材18Cの下端は全方向関節継手22Cを介してリンク部材16Aにその上端側に接近した個所で固着される点については上述の第1の実施形態と同様であるが、しかし駆動リンク部材18Cは先ずその下端側に接近した個所で追加の一軸関節継手30A及び30Bと二軸関節継手22Dとを介して駆動リンク部材16Cの上端に連結される。
詳述すると、先ず、リンク部材18Cの下端側は一軸関節継手30Aに適宜固着され、このとき一軸関節継手30Aはその回動軸線が矢印FBで示される前後方向に延在するように配置される。次いで、一軸関節継手30Aはリンク部材32を介して一軸関節継手30Bと互いに連結され、このとき一軸関節継手30Bもその回動軸線が矢印RLで示される左右方向に延在するように配置される。続いて、一軸関節継手30Bはその回転軸線が二軸関節継手22Dの一方の回動軸線即ち矢印RLで示される左右方向に延在する回動軸線の回りで回動自在となるように該二軸関節継手22Dに連結される。
また、第2の実施形態では、大腿部リンク機構18には駆動リンク部材18Cに加えて駆動リンク部材34が更に設けられ、この駆動リンク部材34は駆動リンク部材16C及び18Cと共に駆動リンク機構を構成する。駆動リンク部材34の下端は一軸関節継手30Bに適宜連結され、駆動リンク部材34の上端側には直線駆動アクチュエータ36が設けられる。一方、駆動リンク部材18Cの上端には一軸関節継手38が適宜連結され、このとき一軸関節継手38はその回動軸線が矢印FBで示される前後方向に沿って延在するように配置される。図7から明らかなように、一軸関節継手38はその回動軸線の回りで直線駆動アクチュエータ36が回動自在となるように該直線駆動アクチュエータ36に適宜固着される。かくして、駆動リンク部材34は一軸関節継手38の回動軸線の回りで回動自在とされた状態でその長さ方向に沿って該直線駆動アクチュエータ36により駆動させられる。
上述の第1の実施形態では、大腿部リンク機構18のリンク部材18Eの中間部が一軸関節継手24Cを介して腰部板12に適宜固着されるが(図1)、しかし第2の実施形態では、一軸関節継手24Aが回転駆動アクチュエータ40及び一軸関節継手24Cを介して腰部板12に適宜固着される。
詳述すると、先ず、回転駆動アクチュエータ40はその一方の出力シャフトが一軸関節継手24Aの回動軸線と共軸となるように該一軸関節継手24Aに連結させられる。次いで、回転駆動アクチュエータ40の他方の出力シャフトは前後方向(FB)に延在するリンク部材42の一端に連結され、そのリンク部材42の他端は腰部板12上に固着された一軸関節継手24Cに連結させられる。要するに、図7から明らかなように、リンク部材42自体は一軸関節継手24Cの回動軸線の回りで回動自在とされる。
また、第1の実施形態の場合と同様に、第2の実施形態が初期状態にあるとき、即ち足部板10が図7に示すように平坦な地面或いは床面におかれているとき、回転駆動アクチュエータ40の回転軸線と回転駆動アクチュエータ28の回転軸線とが互いに一致させられ、歩行動作時には、駆動リンク部材16Cが直線駆動アクチュエータ26Aにより駆動されて大腿部リンク機構18のリンク部材18Eが一軸関節継手24Cの回動軸線の回りで回動させられると、回転駆動アクチュエータ40と回転駆動アクチュエータ28の回転軸線とは互いに交差することとなる。
上述したように、図7に示す第2の実施形態は図1及び図5に示す第1の実施形態の基本構成を含むので、足部板10には腰部板12に対する前後方向(FB)、左右方向(RL)及び上下方向(UL)の並進三自由度が保証され、この並進三自由度に加えて、足部板10には前後方向軸線回りでの回動運動と左右方向軸線回りの回動運動とが保証される。即ち、駆動リンク部材34がその長さ方向に沿って直線駆動アクチュエータ36で駆動させられると、足部板10は二軸関節継手20A及び20Bの前後方向軸線FBAの回りで回動させれ、回動駆動アクチュエータ40が駆動させられると、足部板10は二軸関節継手20A及び20Cの左右方向軸線RLAの回りで回動させられる。かくして、図7に示す第2の実施形態においては、起伏(スロープ)や凹凸(小石や窪み等)のある床面或いは地面でも安定した歩行動作が保証され得ることになる。
なお、図5及び図6に示すような歩行支援装置についても、第2の実施形態の場合と同様に、足部板10に対して前後方向軸線回りでの回動運動と左右方向軸線回りでの回動運動とを保証し得るように構成され得ることは勿論である。
図8を参照すると、本発明による歩行装置の第3の実施形態が示され、この歩行装置は歩行中にその歩行方向を容易に変え得るように構成される。図8でも、図1の場合と同様に、歩行装置を構成する主要な構成要素は図2及び図3を参照して説明したように象徴化されて図示されている。なお、第3の実施形態は上述の第2の実施形態の構成全体を含むものであり、図8では、図7に示す構成要素については同じ参照符号が用いられている。
図8に示すように、第3の実施形態では、腰部板12を第1の腰部板として定義すると、第1の腰部板12上に第2の腰部板44が平行に設けられ、この第2の腰部板44と第1の腰部板とは回転駆動アクチュエータ46によって互いに連結される。回転駆動アクチュエータ46は第1及び第2の腰部板12及び44のいずれか一方をその他方に対して垂直軸線の回りで相対的に回動するように構成される。例えば、回転駆動アクチュエータ46の駆動により、第1の腰部板12が第2の腰部板44に対して該回転駆動アクチュエータ46の回動軸線の回りで回動させられる。歩行装置の歩行行動中、回転駆動アクチュエータ46を駆動することにより、歩行方向を容易に変更することが可能となる。
なお、第3の実施形態で用いられる第2の腰部板44及び回転駆動アクチュエータ46については、図1に示す第1の実施形態の歩行装置の腰部板12に適用してもよく、勿論、この場合には、第1の実施形態の歩行装置の歩行中、その歩行方向を容易に変更することが可能となる。
図9を参照すると、上述の第3の実施形態の変形実施形態が示される。この変形実施形態では、図8に示す二軸関節継手20A、20B及び20Cがそれぞれ一対の一軸関節継手20A1及び20A2と、一対の一軸関節継手20B1及び20B2と、一対の一軸関節継手20C1及び20C2とによって置き換えられ、このとき一軸関節継手20A1、20B1及び20C1の各々はその回動軸線が左右方向(RL)に延在するように配置され、一軸関節継手20A2、20B2及び20C2の各々はその回動軸線が前後方向(FB)に延在するように配置される。一軸関節継手20A1、20B1及び20C1の各々はそれに対応した一軸関節継手(20A2、20B2、20C2)の回動軸線の回りで回動自在となるように該一軸関節継手に連結され、これにより各対の一軸関節継手(20A1及び20A2、20B1及び20B2、20C1及び20C2)はその該当二軸関節継手(20A、20B、20C)と同様に機能することになる。
また、図9に示す変形実施形態においては、図8に示す全方向関節継手22Cが3つの一軸関節継手22C1、22C2及び22C3によって置き換えられ、このとき一軸関節継手22C1はその回動軸線が左右方向(RL)に延在するように配置され、一軸関節継手22C2はその回動軸線が前後方向(FB)に延在するように配置され、一軸関節継手22C3はその回動軸線が上下方向(UL)に延在するように配置される。一軸関節継手22C1は一軸関節継手22C2の回動軸線の回りで回動自在となるように該一軸関節継手22C2に連結され、一軸関節継手22C2は一軸関節継手22C3の回動軸線の回りで回動自在となるように該一軸関節継手22C3に連結され、これにより3つの一軸関節継手22C1、22C2及び22C3は全方向関節継手22Cと同様に機能することになる。
更に、図9に示す変形実施形態においては、二軸関節継手22Dは一対の一軸関節継手22D1及び22D2によって置き換えられ、このとき一軸関節継手22D1はその回動軸線が左右方向(RL)に延在するように配置され、一軸関節継手22D2はその回動軸線が前後方向(FB)に延在するように配置される。一軸関節継手22D1は一軸関節継手22D2の回動軸線の回りで回動自在となるように該一軸関節継手22D2に連結され、これにより一対の一軸関節継手22D1及び22D2は二軸関節継手22Dと同様に機能することになる。
なお、図9の変形実施形態で説明したように、二軸関節継手を一対の一軸関節継手で置き換えること、また全方向関節継手を3つの一軸関節継手で置き換えることについては、図1及び図5にそれぞれ示す実施形態でも行い得ることである。
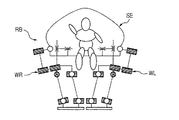
図10を参照すると、本発明による歩行装置を座椅子SEに取り付けて構成した二足歩行ロボットRBが概念的に例示される。図10の左側に示す歩行装置WRは例えば図1及び図4に示す歩行装置として構成されるものであるが、歩行装置WRは概略的に図示されている。一方、図10の右側に示す歩行装置WLは座椅子SEの中心垂直線に対して図1に示したものの対象構造となっているものである。図10には図示されていなが、座椅子SEは双方の歩行装置の腰部板(12)上に設置され、該座椅子SEには歩行機能に障害を持つ障害者或いは歩行機能の低下した高齢者HMが座れるようになっている。
このような二足歩行ロボットRBでは、左右の歩行支援装置WR及びWLのそれぞれに設けられる流体シリンダ(26A、26B)や流体回転モータ(28)を駆動するための加圧流体源としては、例えば油圧装置装置(図示されない)が使用され、このような油圧装置は座椅子SEの適当な個所に装備され得る。なお、図10に示す二足歩行ロボットRBに本発明による歩行装置の第2の実施形態(図7)或いは第3の実施形態(図8、図9)を適用し得ることは勿論である。
図11を参照すると、本発明による歩行支援装置を装着した障害者HMが概念的に例示される。勿論、障害者HMの右脚(図11の観察者にとっては左側の脚)に装着された歩行支援装置WARは図5及び図6に示したものであり、また障害者HMの左脚(図11の観察者にとっては右側の脚)に装着された歩行支援装置WALは障害者HMの中心垂直線に対して図5及び図6に示したものの対象構造となっているものである。この場合、左右の歩行支援装置WR及びWLのそれぞれに設けられる流体シリンダ(26A、26B)や流体回転モータ(28)を駆動するための加圧流体源としては、例えばエアコンプレッサ装置(図示されない)が使用され、このようなエアコンプレッサ装置は障害者或いは高齢者HMの腰回りに装着ベルトでもって保持されてもよいし、或いは障害者或いは高齢者HMによって背負われてもよい。
また、上述したような歩行支援装置は脳梗塞等で歩行機能に障害を受けた患者の機能回復訓練(リハビリテーション)に使用することもできる。この場合、流体シリンダ(26A、26B)や流体回転モータ(28)を駆動するための加圧流体源を移動自在な台車等に設置し、該加圧流体源と流体シリンダ(26A、26B)や流体回転モータ(28)との間を可撓性耐圧ホースで接続させて、その可撓性耐圧ホースを通して加圧流体を源流体シリンダ(26A、26B)や流体回転モータ(28)に供給することが好ましい。
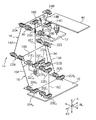
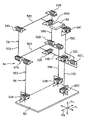
図12を参照すると、本発明による歩行装置の第4の実施形態が示される。図12でも、図1の場合と同様に、歩行装置を構成する主要な構成要素は図2及び図3を参照して説明したように象徴化されて図示される。また、図1の場合と同様に、図示の歩行装置は二足歩行ロボットの右脚を構成し、その左脚は図12に示した右脚に対して対象な構造となる。
図12に示すように、この歩行装置も上述の実施形態の場合と同様に、足部50と、腰部52と、その間に設けられた脚部54とを具備する。足部50及び腰部52は適当な構成材料から形成される。脚部54は下腿部リンク機構56及び大腿部リンク機構58から成る。なお、図12では、足部50及び腰部52はそれぞれ足部板及び腰部板として図示される。
下腿部リンク機構56は4つのリンク部材56A、56B、56C及び56Dを包含し、大腿部リンク機構58は5つのリンク部材58A、58B、58C、58D及び58Eを包含する。
下腿部リンク機構56では、リンク部材56A、56B及び56Cのそれぞれの下端は二軸関節継手60A、60B及び60Cを介して足部板10上に適宜に連結される。図12から明らかなように、二軸関節継手60A、60B及び60Cの各々はその互いに直交する回動軸線が矢印FBで示される前後方向及び矢印RLで示される左右方向にそれぞれ延在するように配置され、このとき二軸関節継手60A及び60Bの双方の前後方向の回動軸線は互いに同軸とされ、二軸関節継手60Cは二軸関節継手60A及び60Bの双方の前後方向の回動軸線に対して離間するように配置される。このような関係が維持される限り、二軸関節継手60A、60B及び60Cは必ずしも図示するように配置される必要はない。例えば、図示の配置では、二軸関節継手60Cはその左右方向の回動軸線が二軸関節継手60A及び60Bの間に延在するように配置されているが、二軸関節継手60Bが二軸関節継手60Cの左右方向の回動軸線を越えて二軸関節継手60A側に接近した位置に配置されてもよい。
また、下腿部リンク機構56においては、リンク部材56A及び56Bの上端はそれぞれ一軸関節継手62A及び62Bに連結され、このとき一軸関節継手62A及び62Bはそれぞれの回動軸線が矢印RLで示される左右方向に延在するように配置される。また、リンク部材56Cの上端は二軸関節継手62Cを介してリンク部材56Dの一端に連結され、このとき二軸関節継手62Cはその互いに直交する回動軸線が前後方向(FB)及び左右方向(RL)に延在するように配置される。また、リンク部材56Dの他端は一軸関節継手62Dを介して大腿部リンク機構58のリンク部材58Dに接続され、このとき一軸関節継手62Dはその回動軸線が前後方向(FB)に延在するように配置される。
大腿部リンク機構58では、リンク部材58A及び58Bの下端はそれぞれ一軸関節継手62A及び62Bに接続され、このとき一軸関節継手62A及び62Bの各々はその回動軸線が左右方向(RL)に延在するように配置される。大腿部リンク機構58のリンク部材58Cの下端は二軸関節継手62Eに接続され、この二軸関節継手62Eはその互いに直交する回動軸線が前後方向(FB)及び左右方向(RL)に延在するように配置される。図示するように、二軸関節継手62Eの左右方向(RL)の回動軸と二軸関節継手62Cの左右方向の左右方向(RL)の回動軸とは互いに共軸とされて連結される。大腿部リンク機構58のリンク部材58Dの一端は一軸関節継手62Aに接続され、その他端は一軸関節継手62Bに接続される。
また、大腿部リンク機構58においては、リンク部材58A及び58Bの上端はそれぞれ一軸関節継手64A及び64Bに接続され、このとき一軸関節継手64A及び64Bの各々はその回動軸線が左右方向(RL)に延在するように配置される。大腿部リンク機構58のリンク部材58Cの上端は二軸関節継手64Cに接続され、この二軸関節継手64Cはその互いに直交する回動軸線が前後方向(FB)及び左右方向(RL)に延在するように配置される。図示するように、二軸関節継手64Cの左右方向(RL)の回動軸の一端は腰部板52に連結される。大腿部リンク機構58のリンク部材58Eの一端は一軸関節継手64Aに接続され、その他端は一軸関節継手64Bに接続される。また、リンク部材58Eは一軸関節継手64Dを介して腰部板52に連結される。
図12に示す第4の本実施形態においては、足部板50と、下腿部リンク機構56のリンク部材56A及び56Bと、大腿部リンク機構58のリンク部材58Dとが第1の下腿部側平行四辺形リンク機構を構成し、また足部板50と、下腿部リンク機構56のリンク部材56B、56C及び56Dとが第2の下腿部側平行四辺形リンク機構を構成することになる。一方、大腿部リンク機構58のリンク部材58A、58B、58D及び58Eが第1の大腿部側平行四辺形リンク機構を構成し、また腰部板52と、下腿部リンク機構56のリンク部材56Dと、大腿部リンク機構58のリンク部材58B及び58Cとが第2の平行四辺形リンク機構を構成する。
図12から明らかなように、第1及び第2の下腿部側平行四辺形リンク機構は互いに実質的に直交するような態様で配置され、また第1及び第2の大腿部側平行四辺形リンク機構も互いに実質的に直交するような態様で配置され、更に第1及び第2の下腿部側平行四辺形リンク機構と第1及び第2の大腿部側平行四辺形リンク機構とは互いに協働するようになっている。
このような構成の歩行装置によれば、第1の下腿部側平行四辺形リンク機構及び第1の大腿部側平行四辺形機構のいずれか一方若しくは双方を変形させることにより、足部板50が地面或いは床面に対して平行に維持した状態で矢印FBで示す前後方向と矢印ULで示す上下方向との双方において移動させられることになる。また、第2の下腿部側平行四辺形リンク機構及び第2の大腿部側平行四辺形機構を変形させることにより、足部板50が地面或いは床面に対して平行に維持した状態で矢印RLで示す左右方向において移動させられる。なお、第1の下腿部側平行四辺形リンク機構の変形と第1の大腿部側平行四辺形機構の変形とは互いに独立しているが、第2の下腿部側平行四辺形リンク機構の変形と第2の大腿部側平行四辺形機構の変形とは互いに連動したものとなる。
図12に示す実施形態では、第1の下腿部側平行四辺形リンク機構を変形させるために、回転駆動アクチュエータ66Aが設けられ、この回転駆動アクチュエータ66Aは大腿部リンク機構のリンク部材58Bによって支持される。なお、回転駆動アクチュエータ66Aの支持態様については図示の複雑化を避けるために省かれている。回転駆動アクチュエータ66Aの出力シャフトに歯車67Aが取り付けられ、その回転駆動力は歯車67Aに掛けられた歯付き駆動伝達ベルト68Aを介して一軸関節継手62Bの回動軸に伝達させられて下腿部リンク機構56のリンク部材56Bを該回動軸の回りで回動させるようになっており、これにより第1の下腿部側平行四辺形リンク機構が変形させられることになる。本実施形態では、回転駆動アクチュエータ66Aはリンク部材58Bによって支持されるが、リンク部材58Aによって支持されてもよく、この場合には、下腿部リンク機構56のリンク部材56Aが一軸関節継手62Aの回動軸の回りで回動させられることになる。なお、図12では、回転駆動アクチュエータ66Aは便宜的にリンク部材58Bの下端側に図示されているが、実際には該リンク部材58Bの上端側に取り付ける。
また、図12に示す実施形態では、第1の大腿部側平行四辺形リンク機構を変形させるために、回転駆動アクチュエータ66Bが設けられ、この回転駆動アクチュエータ66Bは大腿部リンク機構のリンク部材58Eによって支持される。なお、回転駆動アクチュエータ66Aの場合と同様、回転駆動アクチュエータ66Bの支持態様についても図示の複雑化を避けるために省かれている。回転駆動アクチュエータ66Bの出力シャフトに歯車67Bが取り付けられ、その回転駆動力は歯車67Bに掛けられた歯付き駆動伝達ベルト68Bを介して一軸関節継手64Aの回動軸に伝達させられて大腿部リンク機構58のリンク部材58Aを該回動軸の回りで回動させるようになっており、これにより第1の大腿部側平行四辺形リンク機構が変形させられることになる。本実施形態では、回転駆動アクチュエータ66Bにより、リンク部材58Aが一軸関節継手64Aの回動軸の回りで回動させるようになっているが、必要に応じて、リンク部材58Bが一軸関節継手64Bの回動軸の回りで回動させられるようにしてもよい。
更に、図12に示す実施形態では、第2の下腿部側平行四辺形リンク機構及び第2の大腿部側平行四辺形機構の変形のために、回転駆動アクチュエータ66Cが設けられ、この回転駆動アクチュエータ66Cは腰部板52によって支持される。なお、回転駆動アクチュエータ66A及び66Bの場合と同様、回転駆動アクチュエータ66Cの支持態様についても図示の複雑化を避けるために省かれている。回転駆動アクチュエータ66Cの出力シャフトに歯車67Cが取り付けられ、その回転駆動力は歯車67Cに掛けられた歯付き駆動伝達ベルト68Cを介して一軸関節継手64Dの回動軸に伝達させられて大腿部リンク機構58のリンク部材58A及び58Bを該回動軸の回りで回動させるようになっており、これにより第2の下腿部側平行四辺形リンク機構及び第2の大腿部側平行四辺形機構が変形させられることになる。
上述した第1の実施形態の場合と同様、本発明による歩行装置の第4の実施形態においても、下腿部リンク機構56及び大腿部リンク機構58のそれぞれには平行四辺形リンク機構が含まれるので、シリアルリンク機構を用いる従来の歩行装置に比べると、一層大きな構造上の強度が得られ、腰部板52上に大きな荷重を担うことが可能である。また、本実施形態でも、3つの回転駆動アクチュエータ(66A、66B、66C)がすべて腰部板22の付近に纏めて設置されるので、従来の歩行装置の構成、即ちシリアルリンク機構の足首関節部、膝関節部に駆動アクチュエータを設けなければならない構成に比べると、本実施形態でも、その設計上の自由度が大幅に改善され得ることになる。
図13を参照すると、図12に示す歩行装置を歩行支援装置として構成した場合の具体的な構成例が図示され、同図では、図12に示す構成要素と同様な構成要素については、同じ参照符号が用いられている。図13に示す歩行装置の補足的な事項について以下に説明する。なお、図13では、歩行支援装置は右脚及び左脚の双方を持つものとして図示されている。
図13に示す歩行支援装置の補足的な事項について以下に説明する
図示された腰部板52に対応する構成要素として矩形ロッド部材が用いられ、この矩形ロッド部材52には腰当て板70がそこから延びる一対の取付棒によって固着される。また、腰当て板70の裏側にはロッド部材72が水平に固着され、このロッド部材72の両端からは前方に棒部材74が延び、各棒部材74には側板76が固着される。本歩行支援装置が人に装着されたとき、その腰部が腰当て板72及び側板76によって安定して保持され収容されることになる。
各一軸関節継手62Bの回動軸には歯車77が取り付けられ、そこには歯付き駆動伝達ベルト68Aが掛けられる。図示するように、歯車77は上述した歯車67Aよりも大径であり、このため下腿部リンク機構56のリンク部材56Bは大きなトルクで回動させられ得るようになっている。同様に、各一軸関節継手64Aの回動軸には歯車78が取り付けられ、そこには歯付き駆動伝達ベルト68Bが掛けられる。図示するように、歯車78も上述した歯車67Bよりも大径であり、このため大腿部リンク機構58のリンク部材56Aは大きなトルクで回動させられ得るようになっている。
なお、図13に示す歩行支援装置には図12に示す回転駆動アクチュエータ66Cが設けられていないが、これは該歩行支援装置が一応は自分で立つことができるが歩行が困難な高齢者等を対象としているためである。即ち、図13に示す歩行支援装置は歩行困難な高齢者等をパワーアシストするために構成されたものである。勿論、歩行機能に障害のある患者を対象とする場合には、図12に示す回転駆動アクチュエータ66Cを設けて左右方向(RL)へのパワーアシストを行うようにしてもよい。
また、図12及び13に示す第4の実施形態において、歩行方向の転換を行うためには上下方向(UL)の軸線回りでの回転が必要となるが、この場合には6つの二軸回転継手60A、60B、60C、62C、62E及び64Cを全方向関節継手(J4)、例えばスイベル継手及びボール継手等に代えることが好ましい。このような構成にすると、歩行装置の全体の構造的剛性が低減すると共に該歩行装置に弾性的な変形若しくは遊びが付与されることになり、歩行方向の転換がスムーズに行い得ることとなる。
また、上述した第4の実施形態(図13)において、回転駆動アクチュエータ66Aの回動軸を一軸関節継手64Bの回動軸となるように回転駆動アクチュエータ66Aをリンク部材58Eに固着支持させると共に歯車67Aと歯車77との間を適当な動力伝達要素例えばベルトや歯車等により連結させることにより下腿部材リンク機構56を干渉駆動させるようにしてもよい。即ち、この場合には歯車77は回転駆動アクチュエータ66Bからも回転駆動力が得られ、下腿部リンク機構56を一層大きなトルクで回動させることが可能である。
図14を参照すると、図12に示した第4の実施形態の第1の変形実施形態が示される。なお、図14では、図12に示した構成要素と同様な構成要素には同じ参照符号が用いられ、また図14からは回転駆動アクチュエータ66A、66B及び66Cが省かれている。
図14に示す第1の変形実施形態では、二軸関節継手62Eが一軸関節継手62E1でもって置き換えられ、この一軸関節継手62E1はその回動軸線が二軸軸関節継手62Cの左右方向(RL)の回動軸線と共軸となるように設けられる。この場合、リンク部材56Cはその上端で二軸回転継手62Cと一軸関節継手62E1との共軸回りで回動し得るようにその双方の関節継手に接続され、またリンク部材56Dはその一端で二軸回転継手62Cの前後方向(FB)の回動軸の回りで回動するように該二軸回転継手62Cに接続され、更にリンク部材58Cはその下端で一軸関節継手62E1に接続される。このような歩行装置は図12に示した第4の実施形態のものと構造的に等価なものである。
図15を参照すると、図12に示した第4の実施形態の第2の変形実施形態が示される。なお、図15では、図12に示した構成要素と同様な構成要素には同じ参照符号が用いられ、また図15からは回転駆動アクチュエータ66A、66B及び66Cが省かれている。
図14に示す第1の変形実施形態の場合と同様、図15に示す第2の変形実施形態でも、二軸関節継手62Eが一軸関節継手62E2でもって置き換えられ、この一軸関節継手62E2はその回動軸線が二軸軸関節継手62Cの左右方向(RL)の回動軸線と共軸となるように設けられる。この場合、リンク部材56Cはその上端で一軸関節継手62E2に接続され、またリンク部材56Dはその一端で二軸回転継手62Cの前後方向(FB)の回動軸の回りで回動するように該二軸回転継手62Cに接続され、更にリンク部材58Cはその下端で二軸回転継手62Cと一軸関節継手62E2との共軸回りで回動し得るようにその双方の関節継手に接続される。このような歩行装置も図12に示した第4の実施形態のものと構造的に等価なものである。
以上に述べた種々の実施形態では、下腿部リンク機構(16、56)及び大腿部リンク機構(18、58)のそれぞれには平行四辺形リンク機構が含まれ、これにより歩行動作中に足部板(10、50)が地面或いは床面に対して平行に維持されることが保証されているが、しかし歩行動作において足部板(10、50)が地面或いは床面に対して常に平行に維持されることは必ずしも必須の要件ではない。従って、本発明において、下腿部リンク機構(16、56)及び大腿部リンク機構(18、58)に含まれる平行四辺形リンク機構は矩形状リンク機構であってもよい。