JP4586026B2 - 照明及び画像キャプチャの狭域及び広域モードを支援するハンド・サポート可能なイメージング・ベース・バーコード・シンボル読取り装置 - Google Patents
照明及び画像キャプチャの狭域及び広域モードを支援するハンド・サポート可能なイメージング・ベース・バーコード・シンボル読取り装置 Download PDFInfo
- Publication number
- JP4586026B2 JP4586026B2 JP2006540001A JP2006540001A JP4586026B2 JP 4586026 B2 JP4586026 B2 JP 4586026B2 JP 2006540001 A JP2006540001 A JP 2006540001A JP 2006540001 A JP2006540001 A JP 2006540001A JP 4586026 B2 JP4586026 B2 JP 4586026B2
- Authority
- JP
- Japan
- Prior art keywords
- subsystem
- illumination
- mode
- image
- bar code
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Lifetime
Links
- 238000005286 illumination Methods 0.000 title claims description 732
- 238000003384 imaging method Methods 0.000 title claims description 507
- 238000012545 processing Methods 0.000 claims description 327
- 238000000034 method Methods 0.000 claims description 253
- 238000001514 detection method Methods 0.000 claims description 249
- 230000003287 optical effect Effects 0.000 claims description 167
- 230000008569 process Effects 0.000 claims description 89
- 230000006870 function Effects 0.000 claims description 76
- 238000005259 measurement Methods 0.000 claims description 72
- 230000004913 activation Effects 0.000 claims description 51
- 230000005540 biological transmission Effects 0.000 claims description 33
- 230000003139 buffering effect Effects 0.000 claims description 30
- 230000004044 response Effects 0.000 claims description 28
- 239000000872 buffer Substances 0.000 claims description 21
- 230000010354 integration Effects 0.000 claims description 14
- 230000033001 locomotion Effects 0.000 claims description 14
- 230000015572 biosynthetic process Effects 0.000 claims description 6
- 238000005096 rolling process Methods 0.000 claims description 4
- HZHFFEYYPYZMNU-UHFFFAOYSA-K gadodiamide Chemical compound [Gd+3].CNC(=O)CN(CC([O-])=O)CCN(CC([O-])=O)CCN(CC([O-])=O)CC(=O)NC HZHFFEYYPYZMNU-UHFFFAOYSA-K 0.000 description 84
- 239000013598 vector Substances 0.000 description 64
- 230000001960 triggered effect Effects 0.000 description 61
- 238000010586 diagram Methods 0.000 description 52
- 239000010410 layer Substances 0.000 description 46
- 238000013461 design Methods 0.000 description 44
- 238000003491 array Methods 0.000 description 26
- 239000003550 marker Substances 0.000 description 25
- 238000009432 framing Methods 0.000 description 22
- 238000004422 calculation algorithm Methods 0.000 description 20
- 230000007704 transition Effects 0.000 description 19
- 230000007246 mechanism Effects 0.000 description 15
- 238000003672 processing method Methods 0.000 description 15
- 230000000694 effects Effects 0.000 description 14
- 239000012634 fragment Substances 0.000 description 13
- 238000004458 analytical method Methods 0.000 description 12
- 239000002131 composite material Substances 0.000 description 12
- 238000004364 calculation method Methods 0.000 description 11
- 238000004891 communication Methods 0.000 description 11
- 230000008901 benefit Effects 0.000 description 10
- 230000008859 change Effects 0.000 description 10
- 239000011159 matrix material Substances 0.000 description 10
- 239000012792 core layer Substances 0.000 description 9
- 238000012546 transfer Methods 0.000 description 9
- 230000001276 controlling effect Effects 0.000 description 8
- 238000007726 management method Methods 0.000 description 8
- 230000003595 spectral effect Effects 0.000 description 8
- 230000003044 adaptive effect Effects 0.000 description 7
- 238000000605 extraction Methods 0.000 description 6
- 230000008685 targeting Effects 0.000 description 6
- 230000000007 visual effect Effects 0.000 description 6
- 238000005516 engineering process Methods 0.000 description 5
- 230000001976 improved effect Effects 0.000 description 5
- 238000004519 manufacturing process Methods 0.000 description 5
- 238000013507 mapping Methods 0.000 description 5
- 238000012015 optical character recognition Methods 0.000 description 5
- 230000008093 supporting effect Effects 0.000 description 5
- 230000004075 alteration Effects 0.000 description 4
- 230000006835 compression Effects 0.000 description 4
- 238000007906 compression Methods 0.000 description 4
- 238000004590 computer program Methods 0.000 description 4
- 230000002829 reductive effect Effects 0.000 description 4
- 229920006395 saturated elastomer Polymers 0.000 description 4
- 230000009471 action Effects 0.000 description 3
- 230000032683 aging Effects 0.000 description 3
- 238000001444 catalytic combustion detection Methods 0.000 description 3
- 238000009826 distribution Methods 0.000 description 3
- 238000001914 filtration Methods 0.000 description 3
- 239000011521 glass Substances 0.000 description 3
- 238000007689 inspection Methods 0.000 description 3
- 238000005192 partition Methods 0.000 description 3
- 238000005070 sampling Methods 0.000 description 3
- 238000007493 shaping process Methods 0.000 description 3
- 238000009416 shuttering Methods 0.000 description 3
- 238000012360 testing method Methods 0.000 description 3
- 102100026816 DNA-dependent metalloprotease SPRTN Human genes 0.000 description 2
- 101710175461 DNA-dependent metalloprotease SPRTN Proteins 0.000 description 2
- 101100074177 Schizosaccharomyces pombe (strain 972 / ATCC 24843) laf2 gene Proteins 0.000 description 2
- 230000003213 activating effect Effects 0.000 description 2
- 238000013459 approach Methods 0.000 description 2
- 230000006399 behavior Effects 0.000 description 2
- 239000003990 capacitor Substances 0.000 description 2
- 238000009795 derivation Methods 0.000 description 2
- 238000011161 development Methods 0.000 description 2
- 230000018109 developmental process Effects 0.000 description 2
- 238000010191 image analysis Methods 0.000 description 2
- 230000005055 memory storage Effects 0.000 description 2
- 238000012986 modification Methods 0.000 description 2
- 230000004048 modification Effects 0.000 description 2
- 230000036961 partial effect Effects 0.000 description 2
- 238000012805 post-processing Methods 0.000 description 2
- 238000012882 sequential analysis Methods 0.000 description 2
- 238000000638 solvent extraction Methods 0.000 description 2
- 238000012795 verification Methods 0.000 description 2
- 230000002618 waking effect Effects 0.000 description 2
- 206010010071 Coma Diseases 0.000 description 1
- 229910002319 LaF3 Inorganic materials 0.000 description 1
- 230000002159 abnormal effect Effects 0.000 description 1
- 239000008186 active pharmaceutical agent Substances 0.000 description 1
- 201000009310 astigmatism Diseases 0.000 description 1
- 238000005452 bending Methods 0.000 description 1
- 238000004140 cleaning Methods 0.000 description 1
- 230000001427 coherent effect Effects 0.000 description 1
- 238000013481 data capture Methods 0.000 description 1
- 238000013479 data entry Methods 0.000 description 1
- 230000007547 defect Effects 0.000 description 1
- 230000001419 dependent effect Effects 0.000 description 1
- 230000000881 depressing effect Effects 0.000 description 1
- 230000000994 depressogenic effect Effects 0.000 description 1
- 239000006185 dispersion Substances 0.000 description 1
- 238000007687 exposure technique Methods 0.000 description 1
- 239000000284 extract Substances 0.000 description 1
- 230000001815 facial effect Effects 0.000 description 1
- 238000007429 general method Methods 0.000 description 1
- 230000036039 immunity Effects 0.000 description 1
- 230000006872 improvement Effects 0.000 description 1
- 238000010348 incorporation Methods 0.000 description 1
- 230000001939 inductive effect Effects 0.000 description 1
- 230000000977 initiatory effect Effects 0.000 description 1
- 230000000670 limiting effect Effects 0.000 description 1
- 238000012886 linear function Methods 0.000 description 1
- 239000000203 mixture Substances 0.000 description 1
- 238000012544 monitoring process Methods 0.000 description 1
- 238000001579 optical reflectometry Methods 0.000 description 1
- 230000008447 perception Effects 0.000 description 1
- 230000002085 persistent effect Effects 0.000 description 1
- 238000007781 pre-processing Methods 0.000 description 1
- 238000002360 preparation method Methods 0.000 description 1
- 230000005855 radiation Effects 0.000 description 1
- 238000010223 real-time analysis Methods 0.000 description 1
- 230000009467 reduction Effects 0.000 description 1
- 230000001105 regulatory effect Effects 0.000 description 1
- 238000012958 reprocessing Methods 0.000 description 1
- 230000000717 retained effect Effects 0.000 description 1
- 230000002441 reversible effect Effects 0.000 description 1
- 230000011218 segmentation Effects 0.000 description 1
- 239000004065 semiconductor Substances 0.000 description 1
- 230000035939 shock Effects 0.000 description 1
- 230000011664 signaling Effects 0.000 description 1
- 239000007787 solid Substances 0.000 description 1
- 238000011351 state-of-the-art imaging technique Methods 0.000 description 1
- 239000000758 substrate Substances 0.000 description 1
- 239000000725 suspension Substances 0.000 description 1
- 230000001360 synchronised effect Effects 0.000 description 1
- 230000009466 transformation Effects 0.000 description 1
- 238000000844 transformation Methods 0.000 description 1
- 238000012384 transportation and delivery Methods 0.000 description 1
- BYMUNNMMXKDFEZ-UHFFFAOYSA-K trifluorolanthanum Chemical compound F[La](F)F BYMUNNMMXKDFEZ-UHFFFAOYSA-K 0.000 description 1
Images





































































































































Classifications
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06K—GRAPHICAL DATA READING; PRESENTATION OF DATA; RECORD CARRIERS; HANDLING RECORD CARRIERS
- G06K7/00—Methods or arrangements for sensing record carriers, e.g. for reading patterns
- G06K7/10—Methods or arrangements for sensing record carriers, e.g. for reading patterns by electromagnetic radiation, e.g. optical sensing; by corpuscular radiation
- G06K7/10544—Methods or arrangements for sensing record carriers, e.g. for reading patterns by electromagnetic radiation, e.g. optical sensing; by corpuscular radiation by scanning of the records by radiation in the optical part of the electromagnetic spectrum
- G06K7/10712—Fixed beam scanning
- G06K7/10722—Photodetector array or CCD scanning
-
- G—PHYSICS
- G02—OPTICS
- G02B—OPTICAL ELEMENTS, SYSTEMS OR APPARATUS
- G02B13/00—Optical objectives specially designed for the purposes specified below
- G02B13/001—Miniaturised objectives for electronic devices, e.g. portable telephones, webcams, PDAs, small digital cameras
- G02B13/0015—Miniaturised objectives for electronic devices, e.g. portable telephones, webcams, PDAs, small digital cameras characterised by the lens design
- G02B13/005—Miniaturised objectives for electronic devices, e.g. portable telephones, webcams, PDAs, small digital cameras characterised by the lens design having spherical lenses only
-
- G—PHYSICS
- G02—OPTICS
- G02B—OPTICAL ELEMENTS, SYSTEMS OR APPARATUS
- G02B13/00—Optical objectives specially designed for the purposes specified below
- G02B13/001—Miniaturised objectives for electronic devices, e.g. portable telephones, webcams, PDAs, small digital cameras
- G02B13/008—Miniaturised objectives for electronic devices, e.g. portable telephones, webcams, PDAs, small digital cameras designed for infrared light
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06K—GRAPHICAL DATA READING; PRESENTATION OF DATA; RECORD CARRIERS; HANDLING RECORD CARRIERS
- G06K7/00—Methods or arrangements for sensing record carriers, e.g. for reading patterns
- G06K7/10—Methods or arrangements for sensing record carriers, e.g. for reading patterns by electromagnetic radiation, e.g. optical sensing; by corpuscular radiation
- G06K7/10544—Methods or arrangements for sensing record carriers, e.g. for reading patterns by electromagnetic radiation, e.g. optical sensing; by corpuscular radiation by scanning of the records by radiation in the optical part of the electromagnetic spectrum
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06K—GRAPHICAL DATA READING; PRESENTATION OF DATA; RECORD CARRIERS; HANDLING RECORD CARRIERS
- G06K7/00—Methods or arrangements for sensing record carriers, e.g. for reading patterns
- G06K7/10—Methods or arrangements for sensing record carriers, e.g. for reading patterns by electromagnetic radiation, e.g. optical sensing; by corpuscular radiation
- G06K7/10544—Methods or arrangements for sensing record carriers, e.g. for reading patterns by electromagnetic radiation, e.g. optical sensing; by corpuscular radiation by scanning of the records by radiation in the optical part of the electromagnetic spectrum
- G06K7/10712—Fixed beam scanning
- G06K7/10722—Photodetector array or CCD scanning
- G06K7/10732—Light sources
Landscapes
- Physics & Mathematics (AREA)
- Engineering & Computer Science (AREA)
- Electromagnetism (AREA)
- General Physics & Mathematics (AREA)
- Toxicology (AREA)
- General Health & Medical Sciences (AREA)
- Health & Medical Sciences (AREA)
- Artificial Intelligence (AREA)
- Computer Vision & Pattern Recognition (AREA)
- Theoretical Computer Science (AREA)
- Optics & Photonics (AREA)
- Image Input (AREA)
- Facsimile Scanning Arrangements (AREA)
Description
本発明のこれら及びその他の目的は、この後で及びここに添付した特許請求の範囲において、より明白に理解されるようになるであろう。
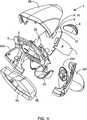
図1A〜図1Kを参照して、実施形態では、図6A2に示された光透過特性を有している高域通過(赤色波長反射)光学フィルタ素子4Aを有する光透過窓3が設けられたハンドル部分2A及びヘッド部分2Bを有しているハンド-サポータブル筐体2を備えている、本発明の第1の実施形態のハンド-サポータブル・デジタル・イメージング・ベース・バーコード・シンボル読取りデバイス1を詳細に示す。以後、詳細に記述されるように、高域通過光フィルタ素子4Aは、高域通過光フィルタ素子4Aと協力する、図6A1に特性が示された内側に取り付けられた低域通過光フィルタ素子4B内で協力する。これらの高域及び低域通過フィルタ素子4A及び4Bは、筐体のヘッド部分に組込みかつイメージング動作中に照明の狭帯域(例えば、633ナノメートル)だけを筐体から出し入れさせる狭帯域光フィルタ・システム4を供給するように協力する。
図2A1のシステム設計モデルに示されているように、実施形態のハンド-サポータブ・デジタル・イメージング・ベース・バーコード・シンボル読取りデバイス1は、図示するように、IRベース物体存在及び範囲検出サブシステム12;画像キャプチャの狭領域モード、画像キャプチャの近視野広領域モード、及び画像キャプチャの遠視野広領域モードを有しているマルチ-モード領域型画像形成及び検出(即ち、カメラ)サブシステム13;照明の狭領域モード、照明の近視野広領域モード、及び照明の遠視野広領域モードを有しているマルチ-モードLEDベース照明サブシステム14;自動露光測定及び照明制御サブシステム15;画像キャプチャリング及びバッファリング・サブシステム16;図2A2に示しかつ上記に詳述した画像処理ベース・バーコード・シンボル読取りの5つのモードを有しているマルチ-モード画像処理バーコード・シンボル読取りサブシステム17;入出力サブシステム18;ユーザ開始制御起動信号をデバイスに送るための手動起動可能トリガ・スイッチ2C;システム・モード構成パラメータ・テーブル(表)70;及び上述したサブシステムの各々と組み込まれたシステム制御サブシステム18を備えている。
各サブシステムの詳細な構造及び機能は、上記のように詳細にここに記述されるであろう。
図2Bは、図1A〜図1Lに示したハンド-サポータブル・デジタル・イメージ・ベース・バーコード読取りデバイス1に対するシステム実施の略図を示す。このシステム実施に示すように、バーコード・シンボル読取りデバイスは、
LEDベース・マルチ-モード照明サブシステム14及び自動露光測定及び照明制御サブシステム15によって実行される電子機能を実現しているコンポーネント(構成要素)を担持している照明ボード33;ランダム的にアクセス可能な興味領域(ROI)ウィンドウ機能を有する1280*1024解画像度で7フレーム/秒で、25Mhzマスタ・クロックで実行される高解画像度(1280×1024 8ビット 6マイクロン画素サイズ)CMOS画像感知アレイ22を担持し、マルチ-モード画像形成及び検出サブシステム13によって実行される電子機能を実現しているCMOSカメラ・ボード34;(i)16ビット 100Mhz外部バス・スピードを有する200mHz 1.0コア電圧で実行されるインテル・サビナール(Intel Sabinal)32ビットマイクロプロセッサPXA210 36、(ii)拡張可能(例えば、8+メガバイト)インテルJ3非同期16ビット・フラッシュ・メモリ37、(iii)100MHzの16メガバイトSDRAM38、(iv)50Mhzクロック周波数及び60MB/秒 データ速度で実行され、カメラ・タイミングを制御しかつ画像収集処理を駆動するように構成された、ザイリンクス・スパルタン(Xilinx Spartan)II FPGA FIFO39、(v)システムの他方のサブシステムを実現するための、マルチメディア・カード・ソケット40、(vi)I2Cバスによって調整可能なMCU用パワー管理モジュール41、及び(vii)一対のUARTs42A及び42B(一つがIRDAポート用、そして一つがJTAGポート用)、を含んでいるCPUボード35(即ち、コンピューティング・プラットフォーム);I/Oサブシステム18によって実行される機能を実現するためのインターフェイス・ボード43;及びサブシステム12を実現するためのIRベース物体存在及び範囲検出回路44、を備えている多数のハードウェア・コンポーネント(構成要素)を用いて実現される。
図3B〜図3Eに示すように、マルチ-モード画像形成及び検出(IFD)サブシステム13は、動作の狭領域画像キャプチャ・モード(即ち、画像感知アレイの中心の回りの画素のいくつかの中央の行だけがイネーブルされる)及び広領域画像キャプチャ・モード(即ち、画像感知アレイの全ての画素がイネーブルされる)を有する。画像形成及び検出サブシステム13のCMOS画像感知アレイ22は、照明されかつ画像形成される物体上の視野(FOV)23を画像感知アレイに設置する画像形成光学系21を有する。図示するように、このFOVは、バーコード読取り装置内に組み込まれたマルチ-モード照明サブシステム14によって照明される。
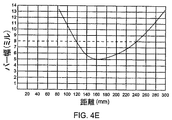
画像形成及び検出サブシステム13の画像形成(即ち、カメラ)光学系の機能は、画像感知アレイ22上に形成される物体の画像を、可能な限り正確的に、形成しかつ投影することである。画像の品質が様々な影響によって制限されるので、実際には、情報の損失なしで物体の絶対的に完全な画像再生を得ることは不可能である。これらの影響は、(i)回折、最良のレンズでさえも常に存在する;(ii)収差、存在するならば、一般的に、最小化されるだけで、消去されない;(iii)物体までの距離の変化、特にレンズがその焦点を動的に調整できないならば;等を含む。レンズ・アアセンブリを生成するために時間及びお金を費やす前に、本発明のバーコード・シンボル読取り装置に対する所与のレンズ設計は、アプリケーションの必要事項を満たすために十分によく動作するということを決定する必要がある。そこで、(i)レンズ性能を定量化するために一つ以上の設計基準を設定すること、及び(ii)所望の性能が達成されるまでこれらの基準の周りの設計を最適化することは、非常に有用である。
図4D〜図4I3を参照して、新規なソフトウェア対応設計ツール及び方法をここで記述する。
実施態様において、LEDベース・マルチ-モード照明サブシステム14は、狭領域照明アレイ27;近視野広領域照明アレイ28;及び遠視野広領域照明アレイ29を備えている。サブシステム14の3つの照明アレイによって生成された狭帯域照明の3つのフィールドを図5A1に概略的に示す。図27及び図28を参照して、以後に記述されるように、狭領域照明アレイ27は、2つの別々に動作可能なアレイ、具体的には:動作の広領域イメージング・モード中に自動IRベース物体存在及び範囲検出サブシステム12の近視野及び遠視野内で目標物体がそれぞれ検出された場合に起動される、近視野狭領域照明アレイ及び遠視野狭領域照明アレイとして実現することができる。しかしながら、説明の目的のために、本発明の第1の実施形態は、図5A1に示すように、実質的にシステムの動作範囲全体にわたり照明するように設計された単一フィールド狭領域(線形)照明アレイだけを採用する。
図5A1に示すように、狭領域(線形)照明フィールド24は、システムの動作範囲内で約30mmから約200mmまで延伸し、かつシステムの近視野及び遠視野の両方の範囲に及ぶ。近視野広領域照明フィールド25は、システムの動作範囲内で約0mmから約100mmまで延伸する。遠視野広領域照明フィールド26は、システムの動作範囲内で約100mmから約200mmまで延伸する。図5A2に示すテーブル(表)は、本発明のマルチ-モードLEDベース照明サブシステム14によって支持される各照明モードの幾何学的特性及び特徴を特定する。
LEDベース・マルチ-モード照明サブシステム14に採用された近視野広領域照明アレイ28は、図5A1に定義されるように、イメージング・ベース・バーコード・シンボル・リーダの視野(FOV)の近視野部分にわたり広い領域を照明するように光学的に設計されている。以後に詳細に説明するように、近視野広領域照明フィールド28は、(1)IRベース物体存在及び範囲検出システム12によるシステムの近視野内の物体の検出;及び(2)以下の事象の一つ以上を含む、例えば、(i)狭領域照明モード中に線形バーコード・シンボルを成功裏に復号処理することの画像プロセッサの故障(障害);(ii)2-Dバーコード・シンボルに関連付けられた制御ワードのようなコード素子の検出;及び/又は(iii)物体が集束の状態でキャプチャされたことを示す画像における画素データの検出;に応じてLEDベース・マルチ-モード照明サブシステム14によって自動的に生成される。
マルチ-モードLEDベース照明サブシステム14に採用される遠視野広領域照明アレイ26は、図5A1に定義されるように、イメージング・ベース・バーコード・シンボル・リーダの視野(FOV)の遠視野部分にわたり広い領域を照明するように光学的に設計されている。以後に詳述するように、遠視野広領域照明フィールド26は、(1)IRベース物体存在及び範囲検出サブシステム12によるシステムの近視野内の物体の検出;及び(2)一つ以上の以下の事象、例えば、(i)狭領域照明モード中に線形バーコード・シンボルを成功裏に復号処理することの画像プロセッサの故障(障害);(ii)2Dバーコード・シンボルに関連付けられた制御ワードのようなコード素子の検出;及び/又は(iii)物体が集束の状態でキャプチャされたことを示す画像における画素データの検出を含む:に応じてLEDベース・マルチ-モード照明サブシステム14によって自動的に生成される。一般的に、IRベース物体存在及び範囲検出サブシステム12の物体検出フィールド及び画像検出及び形成サブシステム13のFOV23は、空間的に同一の広がりを持ちかつ物体検出フィールド20は、イメージング・ベース・バーコード・シンボル・リーダの動作距離全体に沿ってFOV23と空間的に重なる。上述した一つ以上の事象に応じて生成された、遠視野広領域照明フィールド26は、その内に物体が存在する、図5Aに定義されたような、イメージング・ベース・バーコード・シンボル・リーダの視野(FOV)の遠視野部分にわたり広い領域を照明し、かつ物体の2-D画像は、ある配向で、かつ実質的にバーコード・シンボロジーの、その内に表されうる1Dまたは2-Dバーコード・シンボルを読取るために(画像感知アレイ22の全ての行によって)迅速にキャプチャされ、バッファされかつ処理されうる。物体照明及び画像キャプチャ動作中の遠視野広領域照明の強度は、遠視野広領域照明アレイ29に関連付けられたLEDsがマルチ-モード照明サブシステム14によって電気的に駆動される方法によって決定される。LEDsが駆動される程度(即ち、接合電流で測定された)は、自動露光測定及び照明制御サブシステム15によって画像形成平面の近くで測定された反射光の強度によって決定される。自動露光測定及び照明制御サブシステム15の光検出器における反射光の強度が弱く、物体が低光反射率特性を示しかつ画像感知アレイ22における十分な露光を確実にするためにより強い大きさの照明がLEDsによって生成されることが必要であることを示すならば、自動露光測定及び照明制御サブシステム15は、LEDsをより強く駆動する(即ち、より高い動作電流で)。
図6A1に示すように、本発明のバーコード・リーダのハンド-サポータブル筐体は、その筐体内に組み込まれた、狭帯域マルチ-モード照明サブシステム14から生成される可視照明の波長の非常に狭い帯域(例えば、620-700ナノメートル)だけを実質的に透過し、かつどのようにしても生成された(即ち、周囲光源)この狭い光学帯域の外側の全ての他の光学波長を拒絶する狭帯域光学フィルタ・サブシステム4を有する。図示するように、狭帯域光学フィルタ・サブシステム4は、ハンド-サポータブル筐体の前面に形成されたその光透過開口3内に組み込まれた赤色波長反射(高帯域通過)イメージング・ウィンドウ・フィルタ4A;及びCMOS画像感知アレイ22の前に配置された低帯域通過光学フィルタ4Bを備えている。これらの光学フィルタ4A及び4Bは、上述した目的に対して協力して狭帯域光学フィルタ・サブシステム4を形成する。図6A2に示すように、低域通過光学フィルタ素子4Bに関連付けられた光透過特性(エネルギー対波長)は、620ナノメートル以下の光学波長がそれを通って通過される一方で、620ナノメートル以上の光学波長は、実質的にブロックされる(即ち、吸収または反射される)ことを示す。図6A3に示すように、高帯域通過イメージング・ウィンドウ・フィルタ素子4Aに関連付けられた光透過特性(エネルギー対波長)は、700ナノメートル以上の光学波長がそれを通って通過され、それによりユーザに赤色外観を生成する一方で、700ナノメートル以下の光学波長は、光学フィルタ4Aによって実質的にブロックされる(即ち、吸収または反射される)ことを示す。
自動露光測定及び照明制御サブシステム15の主な機能は、(i)CMOSイメージング感知アレイ22の画像平面における露光を測定すること及び(ii)マルチ-モード照明サブシステム14が起動されたLED照明アレイから生成された狭帯域照明で目標物体を照明する時間分を制御することによって収集した画像の輝度(明るさ)及びコントラストを制御することである。そこで、自動露光測定及び照明制御サブシステム15は、CMOSベース画像感知アレイ22に対する複雑なシャッタリング機構の必要性を除去する。この新規な機構は、本発明のイメージング・ベース・バーコード・シンボル・リーダが要求の多いエンド・ユーザ・アプリケーションにおいて高速かつ信頼性がある画像ベース・バーコード復号を保障すべく十分な輝度(明るさ)及びコントラストを有する非飽和(non-saturated)画像を生成することを確実にする。
実施形態では、CMOS画像感知アレイ22は、図7Dに示すように(即ち、その連続フレーム・シャッター・モードよりも)その単一フレーム・シャッター・モードで動作され、かつCMOS画像感知アレイ22の画素の全ての行が共通集積時間を有し、それにより物体が高速運動の状態にある場合でも高品質画像をキャプチャすることを確実にする新規な露出制御方法を採用する。この新たな露出制御技法は、本発明の“汎用露出制御方法”と呼ばれ、かつ図7E1及び7E2のフローチャートは、この方法が実施形態のイメージング・ベース・バーコード・シンボル・リーダにおいて実現される方法を明確にかつ詳細に記述する。以下に汎用露出制御方法をいま詳細に記述する。
図8Aに示すように、IR波長ベース自動物体存在及び範囲検出サブシステム12は、図1Jに示すように、光学系ベンチ6の前方部分に取り付けられたコンパクト光学系モジュール76の型で実現される。
図9に示すように、このデジタル・イメージング・ベース・バーコード・シンボル読取りデバイスに採用されたCMOS画像感知アレイ22は、図2Bに示した(FPGAにより実現される)FIFO39及びシステム・バスを通してそのマイクロプロセッサ36に動作可能に接続される。図示するように、SDRAM38も、また、システム・バスにより、マイクロプロセッサ36に動作可能に接続され、それにより、マイクロプロセッサ36内の直接メモリ・アクセス(DMA)モジュールの制御下のSDRAM38へのCMOS画像感知アレイ22によりキャプチャされた画素データのマッピングを可能にする。
図11に示すように、本発明のハンド-サポータブル・デジタル・イメージング・ベース・バーコード・シンボル読取りデバイス1は、以下のソフトウェア・モジュールを備えている三層ソフトウェア・アーキテクチャが設けられている:(1)それぞれがソフトウェア・アーキテクチャのアプリケーション層内に存在している、主タスク・モジュール、コードゲート・タスク・モジュール、メトロセット・タスク・モジュール、アプリケーション・イベント・マネージャ・モジュール、ユーザ・コマンド・テーブル・モジュール、及びコマンド・ハンドラ・モジュール;(2)それぞれがソフトウェア・アーキテクチャのシステム・コア(SCORE)層内に存在している、タスク・マネージャ・モジュール、イベント・ディスパッチャー・モジュール、入出力マネージャ・モジュール、ユーザ・コマンド・マネージャ・モジュール、タイマー・サブシステム・モジュール、入出力サブシステム・モジュール及びメモリ制御サブシステム・モジュール;及び(3)それぞれがソフトウェア・アーキテクチャのオペレーティング・システム(OS)層内に存在している、リナックス・カーネル・モジュール、リナックス・ファイル・システム・モジュール、及びデバイス・ドライバ・モジュール。
SCORE層は、多数のサービスをアプリケーション層に供給する。
タスク・マネージャは、製品アプリケーション実行中にいつでも特定のアプリケーション・タスク(スレッド)を実行しかつ取消す手段を供給する。
save[filename[compr]]
ここで
(1)saveは、コマンド名である。
(2)filenameは、画像がその中に保存されるファイルの名前である。省略されたならば、デフォルトのfilenameは、“image.bmp”である。
(3)comprは、0から10までの圧縮数字である。省略されたならば、デフォルトの圧縮数字は、0であり、圧縮なしを意味する。圧縮数字が高い程、画像圧縮比が高く、画像伝送が速いが、画像がより歪むようになる。
このシステム内に採用された画像処理ソフトウェアは、画素データを備えているキャプチャされた画像のフレーム内のバーコードを見付け出しかつ認識することによってそのバーコード読取り機能を実行する。画像処理ソフトウェアのモジュール設計は、光学文字認識(OCR)及び光学文字検証(OCV);様々な表面上の直接マークが付けられたシンボルを読取りかつ検証すること;顔(人相)認識及び他のバイオメトリクス識別:のような、バーコード・シンボル読取りに関するかまたは関しない他の潜在的なアプリケーションに対する将来で利用することができる、豊富な組の画像処理機能を供給する。
トリガ・ドライバ(駆動装置)を含む、デバイス・ドライバ・ソフトウェア・モジュールは、イメージング・ベース・デバイスに採用されるハードウェア・ベース手動始動式トリガ・スイッチ2Cとのソフトウェア接続を設定するための手段と、イメージング・ベース・デバイスに載せられた画像収集機能性を実現するための画像収集ドライバと、及びイメージング・ベース・デバイスに載せられた物体検出機能性を実現するためのIRドライバとを供給する。
図13A〜図13Lにおいて、本発明のデジタル・イメージング・ベース・バーコード読取りデバイスの三層ソフトウェア・アーキテクチャによって支持された基本システム動作を概略的に示す。特に、これら基本動作は、ここの開示した画像収集及び処理プラットフォームを用いて、図23に一覧に示しかつ以下に詳細を説明したシステム動作の多数のプログラマブル・モードを実現するために様々な組合せに組み合せることができる、本発明のシステム・アーキテクチャを有する機能的モジュール(または構築ブロック)を示す。本発明の説明、及び不明化の回避の目的で、これら基本システム動作は、システム動作12番目のプログラマブル・モード:マルチ-モード・バーコード読取りサブシステム17のノー-ファインダー・モード及び手動又は自動モードを参照して以下に説明する。
図13N1〜図13N3を参照して、本発明による、鏡面反射なしで物体を照明する方法を、ここで詳細に説明する。この制御ルーチンは、図13Jに示す、主タスク・ルーチンの広領域画像ステップの収集中にコールすることができる。
図14は、本発明のハンド-サポータブル・デジタル・イメージング・ベース・バーコード・シンボル読取りデバイス内に採用されたマルチ-モード・バーコード・シンボル読取りサブシステム17によって支持される様々なバーコード・シンボロジーを一覧表に示す(リストする)。そこに示したように、これらのバーコード・シンボロジーは、Code 128; Code 39; I2 of I5; Code 93; Codabar; UPC/EAN; Telepen; UK-Plessey; Trioptic; Matrix 2 of 5; Ariline 2 of 5; Straight 2 of 5; MSI-Plessey; Code 11;及びPDF 417を含む。
図15に示すように、実施形態のマルチ-モード画像処理ベース・バーコード・シンボル読取りサブシステム17は、動作の5つの主要モード、具体的には:動作の自動モード;動作の手動モード;動作のROI-特定モード;動作のファインダー無しモード;及び動作のオムニスキャン(Omniscan)・モード、を支持する。ここに詳細に説明するように、本発明の画像処理ベース・バーコード読取り処理の寿命中にこれら動作のモードの様々な組合せを用いることができる。
その動作の自動モードにおいて、マルチ-モード・バーコード・シンボル読取りサブシステム17は、増分する方法でその中に表された一つ異常のバーコードをサーチし、かつ画像全体が処理されるまでサーチすることを継続するように、その完全なバッファリングの前に、デジタル画像データのキャプチャされたフレームを処理することを自動的に開始するように設定されている。
その動作の手動モードでは、マルチ-モード・バーコード・シンボル読取りサブシステム17は、ユーザがバーコード・リーダの照準を定める画像の中心またはスウィープ・スポットから開始して、その中に表された少なくとも一つのバーコード・シンボルをサーチする(即ち、見出す)ように、デジタル画像データのキャプチャされたフレームを自動的に処理するように設定されている。自動モードとは異なり、これは、抽出された画像特徴データのフレームまたはブロックを通して螺旋的な方法でサーチし、そしてそれにマークを付けかつバーコード・シンボルが画像データのキャプチャされたフレーム内で認識される/読取られるまで対応する生デジタル画像データを画像処理することによって行われる。
その動作のROI-特定モードでは、マルチ-モード・バーコード・シンボル読取りサブシステム17は、マルチ-モード・バーコード・シンボル読取りサブシステム17内の先に動作のモード中に収集した座標によって特定された、キャプチャされた画像の興味領域(ROI)から開始して、デジタル画像データのキャプチャされたフレームを自動的に処理するように設定されている。手動モードとは異なり、これは、動作の先のファインダー無しモード、自動モード、又はOmniスキャン・モードのいずれかの間中に導き出された受信したROI-特定座標を分析することによって行われ、そして画像特徴データを処理することが直ぐに開始され、かつバーコード・シンボルが画像データのキャプチャされたフレーム内で認識される/読取られるまで対応する生デジタル画像データを画像-処理する。それゆえに、典型的には、ROI-特定モードがマルチ-モード・バーコード・シンボル読取りサブシステム17の他のモードと共に用いられる。
その動作のファインダー無しモードにおいて、マルチ-モード・バーコード・シンボル読取りサブシステム17は、その中に表された一つ以上のバーコード・シンボルを読取るように、自動、手動及びROI特定モードで用いられた特徴抽出及びマーキング動作なしで、デジタル画像データのキャプチャされた狭領域(線形)フレームを自動的に処理するように設定されている。
その動作のOmniスキャン・モードでは、マルチ-モード・バーコード・シンボル読取りサブシステム17は、処理された画像に表された単一のバーコード・シンボルを読取るように、自動、手動及びROI-特定モードで用いられる特徴抽出及びマーキング動作なしで、一つ以上の所定の仮想スキャン・ライン配向に沿ってデジタル画像データのキャプチャされたフレームを自動的に処理するように設定されている。
図17Aに示すように、その動さの自動モード中にマルチ-モード・バーコード・シンボル読取りサブシステムによって実行された画像処理方法は、以下の主要な動作のステップを具備する、具体的には:(1)処理の第1のステージは、高解画像度画像データのキャプチャされたフレームの低解画像度画像を処理することによって興味領域(ROIs)をサーチすること(即ち、見付けること)、低解画像度画像をN×Nブロックに区分すること、空間派生ベースの画像処理技法を用いて各ブロックに対する特徴ベクトル(Fv)を生成すること、高変調の領域に対して特徴ベクトルを検査することによってROIsにマークを付けること、(2)処理の第2のステージは、バーコード配向を計算し、かつROIとしてバーコードの3つのコーナーにマークを付けることを含む、そして(3)処理の第3のステージは、バーコード画像データをトラバースすることによってROI内に表されたバーコード・シンボルを読取ること、特徴ベクトルを更新すること、フィルタされた画像データの零交叉を検査すること、バー及びスペース・パターンを生成すること、及び通常の復号アルゴリズムを用いてバー及びスペース・パターンを復号することを含む。
その動作の自動モード中に、マルチ-モード・バーコード・シンボル読取りサブシステム17における処理の第1のステージは、(i)図18Aに示すように、高解画像度画像データのキャプチャされたフレームの低解画像度G画像を処理することによって興味領域(ROIs)をサーチすること(即ち、見付けること);(ii)図18Bに示すように、パッケージ・ラベルの低解画像度画像をN×Nブロックに区分すること;(iii)勾配ベクトル、エッジ密度量、並行エッジ・ベクトルの数、エドゲル(edgels)のセントロイド、強度変化、及び低解画像度からキャプチャされた強度のヒストグラムを用いて図18Cに示すように、低解画像度画像データの各ブロックに対する特徴ベクトルを生成すること、(iv)図18Dに示すように(空間派生ベース画像処理技法を用いて)高変調、高エッジ密度、多数の並行エッジ・ベクトル及び大きな強度変化の検出によって並行線に対する領域に対する特徴ベクトルを検査すること;及び(v)ROIsにマークを付けること、を具備する。一般に、この処理のステージは、全デジタル画像データ・フレームの全てのラインがメモリにバッファされる前に開始され、かつ読取り処理を始めることができる前にメモリにバッファされるべき所与の(第1の)特徴ブロックにおける行の数だけを典型的に必要とする。
図17BのブロックA、B、C、C1及びXXに示すように、トラッカー・モジュール100の第1の呼出しは、ファインダ・モジュール101、マーケット・モジュール102、及びデコーダ・モジュール103サブコンポーネントをそれらの初期状態にリセットする(ブロックAのように);それは、特徴ベクトル・アレイFv(ブロックDで)及び興味領域(ROI)の数をリセットする。全ての後続の呼出しは、3つのブロックのそれぞれの最大処理ライン数を画像の現行y次元(current y-dimension)にセットする。トラッカー・モジュールは、マルチ-モード・バーコード・シンボル読取りサブシステムを中止することまたは休止することを容易にするために又は作動中にパラメータを変更するために任意のコールバック機能(ポーズ・チェッカー)を呼出す。
図17BのブロックD〜Yに示すように、ファインダ・モジュール101(処理ブロック)は、画像を、それぞれがそれに関連付けられた特徴ベクトル・アレイ(Fv)素子を有する、N×Nブロックに分割する。Fv素子は、その画像ブロック内の並行線の存在の高い可能性を識別する一組の数字を包含する。ブロックD〜Yに示すように、ファインダ・モジュール101は、より低い空間解画像度で画像を処理する;それは、選択された線のそれぞれの内のn番目毎の線及びn番目毎の画素を処理し、それによりnでダウン-サンプルされた(down-sampled-by-n)最初の画像で計算を実行する。各選択された線に対してそれは、以下の計算をする:

Nx=供給された(副)画像のx-次元である。
n=Fvブロックiの内側のedgelの数
動作の自動モード中、マルチ-モード・バーコード・シンボル読取りサブシステム17における処理の第2のステージは、(i)並行線に対する特徴ベクトルを分析することによってバーコード配向を計算すること、及び(ii)x、y座標により、ROIとしてバーコードの4つのコーナーにマークを付けることを含む。
図2A2に示すマルチ-モード・バーコード・シンボル読取りサブシステム17内で、図17BのブロックZ〜ブロックKKで示されたマーカー・モジュールは、ファインダ・モジュールに取って代わり、かつROIの完全な大きさ(程度)を決定すべく各ROIを検査する。次いで、ファインダ・モジュールは、ROIのセントロイドの位置をチェックしかつそれをメモリの累積された画像のライン番号と比較する。
Ny=累積画像のy-次元
vi=画素Iで始まるn画素の組の分散
処理の第3のステージは、バーコードを横断しかつ特徴ベクトルを更新することによってROI内に表されたバーコード・シンボルを読取ること、フィルタされた画像の零交叉を検査すること、バー及びスペース・パターンを生成すること、及びバー及びスペース・パターンを復号することを含む。
図17BのブロックLL〜AAAに示されるように、デコーダ・モジュールは、マーカー・モジュールに取って代わりかつマーカー・モジュールによって先に定義された各ROIを検査する。各ROIに対して、デコーダ・モジュールは、(可能なクワイエット・ゾーンの方向に向けて)潜在的なバーコードのより長い端(より高い先端)を計算するために四角形境界座標{x,y}を用いる。次いで、デコーダ・モジュールは、以下のように可能なスキャン・ラインの最大数を計算する:
ならば、デコーダ・モジュールは、“スペースからバーへの遷移”が発生したという結論に達する。
図19Aは、その動作の手動モード中にマルチ-モード・バーコード・シンボル読取りサブシステムによって実行される処理に含まれるステップ(段階)を示す。この動作の手動モード中に、処理の第1のステージは、高解画像度画像データのキャプチャされたフレームの低解画像度画像を処理することによって興味領域(ROIs)をサーチしかつ見付けること、低解画像度画像をN×Nブロックに区分すること、及び空間派生ベース画像処理技法を用いて中間部ロックに対する特徴ベクトルを生成することを含む。そして、処理の第2のステージは、高変調の領域に対する特徴ベクトルを検査することによってROIsにマークを付けかつ(螺旋的な方法で)中間ブロックを取り囲んでいる他のブロックに対する特徴ベクトルを生成するために第1のステージに戻り、バーコード配向(方位)を計算しかつROIとしてバーコードの4つのコーナーに結果としてマークを付けることを含み、そして(3)処理の第3のステージは、バーコードをトラバースすることによってROI内に表されたバーコード・シンボルを読取ること、特徴ベクトルを更新すること、フィルタされた画像の零交叉を検査すること、バー及びスペース・パターンを生成すること、及びバー及びスペース・パターンを復号することを含む。
図20Aは、その動作のファインダ無し(NoFinder)モード中のマルチ-モード・バーコード・シンボル読取りサブシステムによって実行される画像処理が、動作の自動、手動及びROI-特定モードとは異なり、画像処理の単一のステージを実質的に含むことを示す。このファインダ無し(NoFinder)モード中、サブシステム17は、トラッカー・モジュール、ファインダ・モジュール又はマーカー・モジュールを採用せず、(i)その中間から開始して、一度にスキャン・データの一つのラインだけ、バーコード・リーダによってキャプチャされた狭領域高解画像度画像を直接処理し、(ii)フィルタされた画像の零交叉を検査し、(iii)それからバー及びスペース・パターンを生成し、そして(iv)通常の復号アルゴリズムを用いてバー及びスペース・パターンを復号するためにデコーダ・モジュールだけを代わりに呼出す。読取り処理が成功しなかったならば、サブシステム17は、キャプチャされた狭領域画像の画素高さと見なされるROIの一定の最大高さを仮定して計算される画素オフセットnから開始して、キャプチャされた狭領域画像内のスキャン・データの別のラインをトラバースする。
図21Aは、その動作のオムニスキャン(Omniscan)・モード中のマルチ-モード・バーコード・シンボル読取りサブシステムによって実行される画像処理方法が、動作の自動、手動及びROI-特定モードとは異なり、画像処理の単一のステージを実質的に含むことを示す。このオムニスキャン・モード中、デコーダ・モジュールは、トラッカー・モジュール、ファインダ・モジュールまたはマーカー・モジュールを採用せず、代わりに、サブシステム17によってキャプチャされた画像データの2Dフレーム全体を通して横断している複数の離間された(例えば、50画素)仮想スキャニング・ラインに沿って、バーコード・リーダによってキャプチャされた狭領域高解画像度画像を直接処理する。動作のオムニスキャン・モード中、デコーダ・モジュールは、画像形成されたバーコード・シンボルが、1:1アスペクト比を有する(例えば、1"高さ×1"幅)キャプチャされた広領域高解画像度画像の中心に存在すると仮定する。これらの仮定に基づき、サブシステム17は、第1の所定の角度配向(例えば、0、30、60、90、120または150度)で開始し、そして:(i)(N×N画素(ここで、1<N<10)のスポット-サイズ・ウィンドウを用いて)一組の並行に離間された(例えば、50画素)仮想スキャン・ラインに沿って高解画像度画像を直接処理し;(ii)これらの仮想スキャン・ラインに沿って零交叉を検査し;(iii)それからバー及びスペース・パターンを生成し;そして(iv)バー及びスペース・パターンを復号処理する。選択した角度配向に沿って画像処理がバーコード・シンボルを読取ることに失敗したならば、サブシステム17は、先に処理した一組の仮想スキャン・ライン(例えば、0、30、60、90、120または150度)とは異なる角度で配向された異なる組の並行に離間された仮想スキャン・ラインに沿って高解画像度を自動的に再処理する。この処理サイクルは、単一のバーコード・シンボルが処理された画像内で読取られるまで継続する。
図22Aは、その動作のROI-特定モード中のマルチ-モード・バーコード・シンボル読取りサブシステムによって実行される画像処理方法に含まれるステップを示す。特に、動作のROI-特定モードは、それが、動作の異なるモード、例えば、動作のファインダー無しモードまたはオムニスキャン・モード中にキャプチャされた画像・フレームの処理中に先に識別された特定の“興味領域”(ROI)を自動的に処理するために用いられるということを除いて、動作の手動モードに類似する。
図23は、それがその動作の第1のマルチ-リード(例えば、オムニスキャン/ROI-特定)モードに駆動される場合のマルチ-モード・バーコード・シンボル読取りサブシステム17の動作を記述する。この動作の第1のマルチ-リード・モードでは、サブシステム17は、ここの教示される、適応学習技法を適用して、高速でキャプチャされた高解画像度画像を適応的に処理しかつ読取る。
図24は、適応学習技法を適用して、高速で、キャプチャされた高解画像度画像を適応的に処理しかつ読取るようにそれがその動作の第2のマルチ-リード(例えば、ファインダー無し/ROI-特定)モードに駆動される場合のマルチ-モード・バーコード・シンボル読取りサブシステム17を示す。
図25は、適応学習技法を適用して、高速で、キャプチャされた高解画像度画像を適応的に処理しかつ読取るようにそれがその動作の第3のマルチ-リード(ファインダー無し/オムニスキャン/ROI-特定)モードに駆動される場合のマルチ-モード・バーコード・シンボル読取りサブシステム17を示す。
図26に示すように、本発明のイメージング・ベース・バーコード・シンボル・リーダは、少なくとも17の(17)動作のプログラマブル・システム・モード、具体的には:システム動作のプログラムされたモード第1番目--マルチ-モード・バーコード読取りサブシステムのファインダー無しモードを採用している手動トリガ式単一-試み1D単一-読取りモード;システム動作のプログラムされたモード第2番目--マルチ-モード・バーコード読取りサブシステムのファインダー無しモードを採用している手動トリガ式複数-試み1D単一-読取りモード;システム動作のプログラムされたモード第3番目--マルチ-モード・バーコード読取りサブシステムのファインダー無しモード及び自動又は手動モードを採用している手動トリガ式単一-試み1D/2D単一-読取りモード;システム動作のプログラムされたモード第4番目--マルチ-モード・バーコード読取りサブシステムのファインダー無しモード及び自動又は手動モードを採用している手動トリガ式複数-試み1D/2D単一-読取りモード;システム動作のプログラムされたモード第5番目--マルチ-モード・バーコード読取りサブシステムのファインダー無しモード及び自動又は手動モードを採用している手動トリガ式複数-試み1D/2D複数-読取りモード;システム動作のプログラムされたモード第6番目--マルチ-モード・バーコード読取りサブシステムのファインダー無しモードを採用している自動トリガ式単一-試み1D単一-読取りモード;システム動作のプログラムされたモード第7番目--マルチ-モード・バーコード読取りサブシステムのファインダー無しモードを採用している自動トリガ式複数-試み1D単一-読取りモード;システム動作のプログラムされたモード第8番目--マルチ-モード・バーコード読取りサブシステムのファインダー無しモード及び手動及び/又は自動モードを採用している自動トリガ式複数-試み1D/2D単一-読取りモード;システム動作のプログラムされたモード第9番目--マルチ-モード・バーコード読取りサブシステムのファインダー無しモード及び手動及び/又は自動モードを採用している自動トリガ式複数-試み1D/2D複数-読取りモード;システム動作のプログラムされたモード第10番目--マルチ-モード・バーコード読取りサブシステムの手動、自動またはオムニスキャン・モードを採用している自動トリガ式複数-試み1D/2D単一-読取りモード;システム動作のプログラムされたモード第11番目--マルチ-モード・バーコード読取りサブシステムのファインダー無しモード及び自動又は手動モードを採用している半自動トリガ式単一-試み1D/2D単一-読取りモード;システム動作のプログラムされたモード第12番目--マルチ-モード・バーコード読取りサブシステムのファインダー無しモード及び自動又は手動モードを採用している半自動トリガ式複数-試み1D/2D単一-読取りモード;システム動作のプログラムされたモード第13番目--マルチ-モード・バーコード読取りサブシステムのファインダー無しモード及び自動又は手動モードを採用している半自動トリガ式複数-試み1D/2D複数-読取りモード;システム動作のプログラムされたモード第14番目--マルチ-モード・バーコード読取りサブシステムのファインダー無しモード及びオムニスキャン・モードを採用している半自動トリガ式複数-試み1D/2D複数-読取りモード;システム動作のプログラムされたモード第15番目--マルチ-モード・バーコード読取りサブシステムの自動、手動またはオムニスキャン・モードを採用している連続的自動トリガ式複数-試み1D/2D複数-読取りモード;システム動作のプログラムされたモード第16番目イメージング・ベース・バーコード・リーダ動作の診断モード;及びシステム動作のプログラムされたモード第17番目イメージング・ベース・バーコード・リーダ動作のライブ・ビデオ・モード、を有している。
このバーコード・リーダが起動した場合、そのFPGAは、12.5/50/25MHzクロック・ファームウェアで自動的にプログラムされかつ全ての必要なデバイス・ドライバもまた自動的に設置される。また、オペレーティング・システムへのログインもユーザ“ルート(root)”に対して自動的に行われ、そしてユーザは、the/root/directoryに自動的に指向される。自動物体検出を採用しているほとんど全てのプログラマブル・システム動作モードに対して、IR物体検出ソフトウェア・ドライバが自動的に設置される。また、狭領域照明モードを採用している全てのプログラマブル・システム動作モードに対して、狭領域照明ソフトウェア・ドライバが自動的に設置されて、パルス幅変調(PWM)が狭領域LEDベース照明アレイ27を駆動するために用いられる。バーコード・リーダ動作を開始するために、オペレーティング・システムは、まずthe/tmp/directory(“cd/tmp”)をコールし、そしてthe/root/directoryがフラッシュROMに配置され、かつキャプチャされた画像を保存するために、RAMに配置される、the directory/tmp/がホストへの遷移で画像が記憶される現行のディレクトリであるべきであるから、/root/directoryに配置されたfocusapp プログラムが実行される。
本発明のハンド-サポータブル画像処理バーコード・シンボル・リーダは、図26Aの1番目〜5番目で示される、多数の異なる“手動トリガ式”システム動作モードのいずれか一つで動作するようにプログラムすることができる。しかしながら、これら手動トリガ式動作モードのそれぞれの間中、画像処理バーコード・シンボル・リーダは、手動トリガ式動作の汎用方法に従ってそのサブシステム構成要素を制御しかつ調整する。
(i)画像キャプチャリング及びバッファリング・サブシステムは、前記マルチ-モード画像形成及び検出サブシステムの狭領域画像キャプチャ・モード中に、FOV内で狭帯域照明の狭領域フィールドを用いて物体の狭領域デジタル画像を自動的にキャプチャしかつバッファし;そして
(ii)画像処理バーコード・シンボル読取りサブシステムは、その中に表された1Dバーコード・シンボルを読取るために狭領域デジタル画像を処理することを試みる前記1Dデジタル画像を自動的に処理し、かつその中の1Dバーコード・シンボルを成功裏に復号することにより、その表現であるシンボル文字データを自動的に生成する。
(i)マルチ-モードLEDベース照明サブシステムは、マルチ-モード画像形成及び検出サブシステムのFOV内で狭帯域照明の広領域フィールドを自動的に請求項製し、
(ii)画像キャプチャリング及びバッファリング・サブシステムは、画像キャプチャリング及びバッファリングの広領域画像キャプチャ・モード中に、広領域デジタル画像をキャプチャしかつバッファし、そして
(iii)画像処理バーコード・シンボル読取りサブシステムは、その中に表される1D又は2Dバーコード・シンボルを読取るために広領域デジタル画像を処理し、かつその中の1D又は2Dバーコード・シンボルを成功裏に復号することにより、その表現であるシンボル文字データを自動的に生成する。
システム動作1番目のプログラムされたモードは、以下のようなシステムの設定を含む:IRベース物体存在及び範囲検出サブシステム12を無効にすること;そして手動トリガ起動の使用、マルチ-モード照明サブシステム14内の狭領域照明モード、画像形成及び検出サブシステム13の狭領域画像キャプチャ・モード、及びマルチ-モード・バーコード読取りサブシステム17のファインダー無しモードを有効にすること。
システム動作2番目のプログラムされたモードは、以下のシステムの設定を含む:IRベース物体存在及び範囲検出サブシステム12を無効にすること;そして手動トリガ起動の使用、マルチ-モード照明サブシステム14内の狭領域照明モード、画像形成及び検出サブシステム13の狭領域画像キャプチャ・モード、及びマルチ-モード・バーコード読取りサブシステム17のファインダー無しモードを有効にすること。
システム動作3番目のプログラムされたモードは、以下のシステムの設定を含む:IRベース物体存在及び範囲検出サブシステム12を無効にすること;そして手動トリガ起動の使用、マルチ-モード照明サブシステム14内の狭領域及び広領域照明モード、画像形成及び検出サブシステム13の狭領域及び広領域画像キャプチャ・モード、及びマルチ-モード・バーコード読取りサブシステム17のファインダー無しモード及び手動、ROI-特定及び/又は自動モードを有効にすること。
システム動作4番目のプログラムされたモードは、以下のシステムの設定を含む:IRベース物体存在及び範囲検出サブシステム12を無効にすること;そして手動トリガ起動の使用、マルチ-モード照明サブシステム14内の狭領域及び広領域照明モード、画像形成及び検出サブシステム13の狭領域及び広領域画像キャプチャ・モード、及びマルチ-モード・バーコード読取りサブシステム17のファインダー無しモード及び手動、ROI-特定及び/又は自動モードを有効にすること。
システム動作5番目のプログラムされたモードは、以下のシステムの設定を含む:IRベース物体存在及び範囲検出サブシステム12を無効にすること;そして手動トリガ起動の使用、マルチ-モード照明サブシステム14内の狭領域及び広領域照明モード、画像形成及び検出サブシステム13の狭領域及び広領域画像キャプチャ・モード、及びマルチ-モード・バーコード読取りサブシステム17のファインダー無しモード及び手動、ROI-特定及び/又は自動モードを有効にすること。
システム動作6番目のプログラムされたモードは、以下のシステムの設定を含む:手動トリガ起動の使用を無効にすること;そしてIRベース物体存在及び範囲検出サブシステム12、マルチ-モード照明サブシステム14内の狭領域照明モードのみ、画像形成及び検出サブシステム13の狭領域画像キャプチャ・モードのみ、及びマルチ-モード・バーコード読取りサブシステム17のファインダー無しモードを有効にすること。
システム動作7番目のプログラムされたモードは、以下のシステムの設定を含む:手動トリガ起動の使用を無効にすること;そしてIRベース物体存在及び範囲検出サブシステム12、マルチ-モード照明サブシステム14内の狭領域照明モード、画像形成及び検出サブシステム13の狭領域画像キャプチャ・モード、及びマルチ-モード・バーコード読取りサブシステム17のファインダー無しモードを有効にすること。
システム動作8番目のプログラムされたモードは、以下のシステムの設定を含む:システム動作の全てのフェーズ中の手動トリガ起動の使用を無効にすること;そしてIRベース物体存在及び範囲検出サブシステム12、マルチ-モード照明サブシステム14内の狭領域照明モード、画像形成及び検出サブシステム13の狭領域画像キャプチャ・モード、及びマルチ-モード・バーコード読取りサブシステム17のファインダー無しモード及び手動、ROI-特定及び/又は自動モードを有効にすること。
システム動作9番目のプログラムされたモードは、以下のシステムの設定を含む:システム動作の全てのフェーズ中の手動トリガ起動の使用を無効にすること;そしてIRベース物体存在及び範囲検出サブシステム12、マルチ-モード照明サブシステム14内の狭領域照明モード、画像形成及び検出サブシステム13の狭領域画像キャプチャ・モード、及びマルチ-モード・バーコード読取りサブシステム17のファインダー無しモード及び手動又は自動モードを有効にすること。
システム動作10番目のプログラムされたモードは、以下のシステムの設定を含む:システム動作の全てのフェーズ中の手動トリガ起動の使用を無効にすること;そしてIRベース物体存在及び範囲検出サブシステム12、マルチ-モード照明サブシステム14内の狭領域照明モード、画像形成及び検出サブシステム13の狭領域画像キャプチャ・モード、及びマルチ-モード・バーコード読取りサブシステム17の手動、ROI-特定、自動又はオムニスキャン・モードを有効にすること。
システム動作11番目のプログラムされたモードは、以下のシステムの設定を含む:システム動作のフェーズ中の手動トリガ起動の使用を無効にすること;そしてIRベース物体存在及び範囲検出サブシステム12、マルチ-モード照明サブシステム14内の狭領域及び広領域照明モード、画像形成及び検出サブシステム13の狭領域及び広領域画像キャプチャ・モード、及びマルチ-モード・バーコード読取りサブシステム17のファインダー無しモード及び手動、ROI-特定、及び/又は自動モードを有効にすること。
システム動作12番目のプログラムされたモードは、以下のシステムの設定を含む:システム動作のフェーズ中の手動トリガ起動の使用を無効にすること;そしてIRベース物体存在及び範囲検出サブシステム12、マルチ-モード照明サブシステム14内の狭領域及び広領域照明モード、画像形成及び検出サブシステム13の狭領域及び広領域画像キャプチャ・モード、及びマルチ-モード・バーコード読取りサブシステム17のファインダー無しモード及び手動、ROI-特定、及び/又は自動モードを有効にすること。
フォーカスIRモジュールが物体検出フィールド20の前方で物体を検出する場合、それは、アプリケーション層にOBJECT_DETECT_ONイベントをポスト(掲示)する。このイベントを処理する役目があるアプリケーション層ソフトウェアは、コード・ゲート・タスクを始動する。ユーザがトリガ・スイッチ2Cを引いた場合、TRIGGER_ONイベントがアプリケーションにポストされる。このイベントを処理する役目があるアプリケーション層ソフトウェアは、コード・ゲート・タスクが実行されているかどうかをチェックし、そして実行されているならば、それは、それを取消して主タスクを始動する。ユーザがトリガ・スイッチ2Cを解放した場合、TRIGGER_OFFイベントがアプリケーションにポストされる。このイベントを処理する役目があるアプリケーション層ソフトウェアは、主タスクが実行されているかどうかをチェックし、そして実行されているならば、それは、それを取消す。物体が物体検出フィールド20内にまだあるならば、アプリケーション層は、再びコード・ゲート・タスクを始動する。
システム動作13番目のプログラムされたモードは、以下のシステムの設定を含む:動作のシステム起動フェーズ中の手動トリガ起動の使用を無効にすること;そしてIRベース物体存在及び範囲検出サブシステム12、マルチ-モード照明サブシステム14内の狭領域及び広領域照明モード、画像形成及び検出サブシステム13の狭領域及び広領域画像キャプチャ・モード、及びマルチ-モード・バーコード読取りサブシステム17のファインダー無しモード及び手動、ROI-特定、及び/又は自動モードを有効にすること。
システム動作14番目のプログラムされたモードは、以下のシステムの設定を含む:動作のシステム起動フェーズ中の手動トリガ起動の使用を無効にすること;そしてIRベース物体存在及び範囲検出サブシステム12、マルチ-モード照明サブシステム14内の狭領域及び広領域照明モード、画像形成及び検出サブシステム13の狭領域及び広領域画像キャプチャ・モード、及びマルチ-モード・バーコード読取りサブシステム17のファインダー無しモード及びオムニスキャン・モードを有効にすること。
システム動作15番目のプログラムされたモードは、以下のシステムの設定を含む:システム動作の全フェーズ中の手動トリガ起動の使用を無効にすること;そしてIRベース物体存在及び範囲検出サブシステム12、マルチ-モード照明サブシステム14内の広領域照明モード、画像形成及び検出サブシステム13の広領域画像キャプチャ・モード、及びマルチ-モード・バーコード読取りサブシステム17の手動、ROI-特定、自動又はオムニスキャン・モードを有効にすること。
システム動作16番目のプログラムされたモードは、診断モードである。認定されたユーザは、バーコード・リーダでコマンド・ライン・インターフェイス(CLI)を開始するためにバーコード・リーダに特別のコマンドを送信することができる。バーコード・リーダがユーザから係る要求を受信する場合、それは、スキャナがユーザ・コマンドを受け入れる準備が整っているというハンドシェーキング表示としてプロンプト“MTLG>”をユーザに送り戻す。次いで、ユーザは、いずれかの有効コマンドをバーコード・リーダに入力しかつその実行の結果を見る(ビューする)ことができる。RS232のように通信回路にわたり診断モードのリーダと通信するために、ユーザは、例えば、Windows HyperTerminal(ウィンドウズ・ハイパーターミナル)のような、あらゆる標準通信プログラムを用いることができる。この動作のモードは、新たに導入された特徴をテスト/デバッグか又はバーコード・リーダ設定パラメータを見る(ビューする)/変更するために用いることができる。それは、また、リーダ・メモリからホスト・コンピュータに画像及び/又は先に復号されたバーコード・データのバックログをダウンロードするために用いることができる。
システム動作17番目のプログラム・モードは、他の支持イメージング・モードとの組合せで用いることができる。このモードでは、バーコード・リーダによって収集された画像は、サブシステム17による画像処理ベース・バーコード・シンボル読取りの結果(係る結果が利用可能であるならば)と一緒にリアルタイムでホスト・コンピュータに送信される。
上述した第1の実施形態では、マルチ-モード照明サブシステム14は、照明の3つの主要モードを有していた:(1)狭領域照明モード;(2)近視野広領域照明モード;及び(3)遠視野広領域照明モード。
代替的に、本発明のイメージング・ベース・バーコード・シンボル読取り装置は、様々なアプリケーション環境でバーコード・シンボルの読取りを支持するあらゆる種類のフォーム・ファクタ(形状因子)を実質的に有することができる。本発明のバーコード・シンボル読取りデバイスに対する一つの代替的フォーム・ファクタを図29A〜29Cに示し、そこでは、本発明のポータブル・デジタル・イメージング・ベース・バーコード・シンボル読取りデバイス1が様々な斜視図から示され、同時に存在モードに配置されている(即ち、プログラムされたシステム・モード12番目に設定された)。
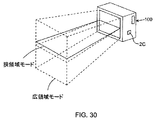
図30に示すように、本発明のデジタル・イメージング・ベース・バーコード読取り装置1´、1"は、様々な種類の情報収集及び処理システムに容易に組み合せる(統合する)ことができるデジタル・イメージング・ベース・バーコード読取りエンジン100の型でも実現することができる。特に、図30に示すトリガ・スイッチ2Cは、エンジン設計の筐体に象徴的に表され、かつこのトリガ・スイッチ2C又は機能的に同等なデバイスは、ユーザがエンジンと対話(相互作用)できかつそれを起動することができるようにエンジンが組み込まれる、結果として得られたシステムの筐体と典型的に組み合される(統合される)ということが理解される。本発明による係るエンジンは、様々な形状及び大きさで実現することができかつここの教示した様々な画像キャプチャ及び処理機能を必要とする(要求する)様々な種類のシステム及びデバイス内に組み込むことができる。
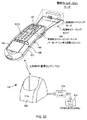
図31、32及び33は、ここに記述した本発明のデジタル・イメージング・ベース・バーコード・シンボル読取りエンジン100を採用しているバーコード駆動式PDT150;及び受話器台供給基地局155を備えている:本発明による無線バーコード駆動式ポータブル・データ端末(PDT)システム140を示す。
図1〜図34に示したシステムでは、自動照明制御は、露出中のLED照明の存続時間を正確に制御することによって供給され、それにより、よく照明された画像をキャプチャする。しかしながら、ある状況では、より大きな程度の照明制御が必要になり図35〜36に示した方法が有用でありうる。
上述したハンド-ヘルド画像処理バーコード・シンボル・リーダは、システムの狭領域視野の近傍でユーザへ可視表示を供給する狭領域照明光線を採用する。しかしながら、動作のその広領域画像キャプチャ・モード中にシステムを動作すると同時に、特定のアプリケーションにおいて、システムの広領域視野の可視表示を供給することが望ましいであろう。係るターゲティング/マーキング機能を供給するための様々な技法がこの技術分野で知られているが、図37〜39を参照して新規な方法を以下に説明する。
本発明の代替的実施形態では、マルチ-モード照明サブシステム14内で採用された照明アレイ27、28及び29は、例えば、Metrologic Instruments, Inc.を出願人としてかつここの完全に示されるかのように、その全てが参照文献としてここに採用された、2002年5月30日に発行された、WIPO公報No.WO02/43195A2に詳細が教示される、可視レーザ・ダイオード(VLDs)のような、LED以外のソリッドステートの光源を用いて実現されうる。しかしながら、本発明のイメージング・ベース・バーコード・シンボル・リーダにVLDベース照明技法を用いる場合、物体照明及びイメージング動作中にコヒーレント照明源を用いる場合に画像検出アレイ22で生成されるスペックル・ノイズを除去するかさもなければ実質的に低減するために大いなる注意が払われなければならない。上記WIPO公報No.WO02/43195A2は、VLD-ベース照明アレイを用いる場合に画像形成及び検出中にスペックル・ノイズを除去するか又は実質的に低減するための様々な方法及び装置を提供する。
Claims (34)
- ハンド-サポータブル・デジタル・イメージング・ベース・バーコード・シンボル読取りデバイスであって、
物体が画像形成される視野(FOV)を生成する画像形成光学系、及び画像感知アレイの画素が有効にされる画像キャプチャ・モードの照明動作中に物体から反射された画像形成された光を検出するCMOS領域型画像感知アレイを有している画像形成及び検出サブシステムと;
LEDベース照明アレイを有しており、その画像キャプチャ・モード中に画像形成及び検出サブシステムのFOV内の狭領域照明のフィールドを生成するマルチ-モードLEDベース照明サブシステムと;
前記画像形成及び検出サブシステムのFOV内の物体検出フィールドを生成する自動物体存在決定サブシステムと;
前記FOVの中心部分に入射する露光を自動的に測定し、かつ前記LEDベース・マルチ-モード照明サブシステムの動作を制御する自動露光測定及び照明制御サブシステムと;
前記画像形成及び検出サブシステムによって検出された2-D画像をキャプチャリングしかつバッファリングする画像キャプチャリング及びバッファリング・サブシステムと;
前記画像キャプチャリング及びバッファリング・サブシステムによってキャプチャされかつバッファされた画像を処理しかつ表された1-D及び2-Dバーコード・シンボルを読取るマルチモード画像処理ベース・バーコード・シンボル読取りサブシステムと;
外部ホスト・システムまたは他の情報受信または応答デバイスへ処理した画像データを出力する入出力サブシステムと;及び
上述した前記サブシステム構成要素を起動しかつ制御する一又はそれ以上のシステム制御サブシステムと
、を備え、
一度前記CMOS領域型画像感知アレイが前記システム制御サブシステムによって起動され、かつ前記CMOS領域型画像感知アレイの全ての行が集積の状態にある場合、前記システム制御サブシステムは、前記自動露光測定及び照明制御サブシステムを自動的に起動し、当該自動露光測定及び照明制御サブシステムは、それに応じて、前記CMOS領域型画像感知アレイの全ての行が集積の状態にありかつ共通の集積時間を有する場合、、正確な方法で前記LEDベース照明サブシステムに関連付けられたLEDベース照明アレイを自動的に駆動して、前記CMOSアレイ領域型画像感知アレイの画素の全ての行を同時に、前記LEDベース照明に露出し、それによりに、前記ハンド−サポータブル・デジタル・イメージング・ベース・バーコード・シンボル読取りデバイスと物体との間の相対運動に係わりなくデジタル画像をキャプチャするために前記画像キャプチャリング及びバッファリング・サブシステムを有効にする、ことを特徴とするハンド-サポータブル・デジタル・イメージング・ベース・バーコード・シンボル読取りデバイス。 - 前記ハンド-サポータブル筐体は、イメージング・ウィンドウを有し、かつ前記LEDベース照明サブシステムは、前記イメージング・ウィンドウに配置された赤色波長反射高域レンズ素子を備え、低域フィルタは、前記CMOS領域型画像感知アレイの前に配置され、前記ハンド-サポータブル筐体に組み込まれた狭帯域透過型光学フィルタ・システムを形成して、前記照明の狭領域内に包含された光の光学構成要素だけを透過すると同時に、周囲光の全ての他の構成要素は、前記CMOS領域型画像検知アレイでの画像検出の前に実質的に拒まれる、
ことを特徴とする請求項1に記載のハンド-サポータブル・デジタル・イメージング・ベース・バーコード・シンボル読取りデバイス。 - 前記自動露光測定及び照明制御サブシステムは、前記ハンド-サポータブル筐体内に配列された球光収集ミラー及び光ダイオードを備え、かつ
入射照明は、前記光収集ミラーを用いて前記FOVの中心の選択された部分から収集され、そして前記LEDベース照明サブシステムによって生成された照明を制御するために反射された照明の強度の検出及び前記自動露光測定及び照明制御サブシステムによる後続の処理のために光ダイオードに集束される、
ことを特徴とする請求項2に記載のハンド-サポータブル・デジタル・イメージング・ベース・バーコード・シンボル読取りデバイス。 - 照明は、CMOS領域型画像感知アレイが十分な輝度の照明された物体のデジタル画像を生成するように、前記LEDベース照明アレイを、適当な強度で、駆動するための制御信号を生成するように前記FOVの中心から収集されかつ自動的に検出される、
ことを特徴とする請求項3に記載のハンド-サポータブル・デジタル・イメージング・ベース・バーコード・シンボル読取りデバイス。 - 前記CMOS領域型画像感知アレイは、その単一フレーム・シャッター・モードで動作され、かつ前記CMOS領域型画像感知アレイの画素の全ての行が共通集積時間を有するということを確実にする照明制御方法を採用し、それにより物体が移動の状態にある場合でも高品質画像をキャプチャするために前記画像キャプチャリング及びバッファリング・サブシステムを有効にする(物体が移動の状態にある場合でも前記画像キャプチャリング及びバッファリング・サブシステムがデジタル画像をキャプチャできるようにする)、
ことを特徴とする請求項1に記載のハンド-サポータブル・デジタル・イメージング・ベース・バーコード・シンボル読取りデバイス。 - 前記汎用照明制御方法は、
(a)CMOS領域型イメージング感知アレイに対して動作の単一フレーム・シャッター・モードを選択し;
(b)後続処理のために、FOVの部分からの照明を連続的に収集し、収集された照明の強度を検出し、かつ検出された強度に対応している電気アナログ信号を生成するために前記自動露光測定及び照明制御サブシステムを使用し;
(c)その画素の行が前記画像形成光学系により前記CMOS領域型画像感知アレイに光学画像の形成に応じて光的に生成された電荷を集積することを開始するように前記CMOS領域型画像感知アレイを起動し;
(d)自動的に(i)画像感知アレイの画素の全ての行が集積の状態で動作される場合に電子ローリング・シャッターデジタル・パルス信号を生成し、かつ(ii)その中の露光測定及び照明制御機能/動作を起動するように前記自動露光測定及び照明制御サブシステムに前記電子ローリング・シャッターパルス信号を供給するために、前記CMOS画像感知アレイを使用し;
(e)サブシステム内の露光測定及び照明制御機能の起動により、(i)その中で連続的に生成されている電気アナログ信号を処理し、(ii)(光収集光学系によって決定された)FOVの中心部分内の露光レベルを測定し、そして(iii)前記LEDベース照明アレイからの可視照明の生成を制御するために自動露出制御信号を生成し;
(f)前記CMOS領域型画像感知アレイの画素の全ての行が集積の状態にあるまさにその場合に、前記LEDベース照明アレイを駆動しかつそれが設定されうるあらゆる画像キャプチャ・モードにおける前記CMOS画像感知アレイの視野を照明するために自動露出制御振動を使用し、それにより前記CMOS領域型画像感知アレイの画素の全ての行が共通集積時間を有することを確実にする、
ことを具備する、ことを特徴とする請求項5に記載のハンド-サポータブル・デジタル・イメージング・ベース・バーコード・シンボル読取りデバイス。 - ハンド-サポータブル・デジタル・イメージング・ベース・バーコード・シンボル読取りデバイスであって、
ハンド-サポータブル筐体と;
物体が画像形成される視野(FOV)を生成する画像形成光学系、及び画像感知アレイの画素の行が有効にされる画像キャプチャ・モードの照明動作中に物体から反射された画像形成された光を検出するCMOS領域型画像感知アレイ、を有している領域型画像形成及び検出サブシステムと;
(i)前記LEDベース照明サブシステムから伝送され、(ii)前記照明された物体から散乱され、かつ(iii)前記ハンド-サポータブル筐体内に組み込まれた狭帯域伝送型光学フィルタ・サブシステムを通して伝送された、可視LEDベース照明だけが、前記CMOS領域型画像感知アレイによって検出されると同時に、周囲光の全ての他の構成要素が拒まれるように、画像キャプチャ・モード中に前記FOV内の狭帯域照明の狭領域及び広領域フィールドを生成するLEDベース照明サブシステムと;
前記画像形成及び検出サブシステムによって検出された2-D画像をキャプチャリングしかつバッファリングする画像キャプチャリング及びバッファリング・サブシステムと;
前記画像キャプチャリング及びバッファリング・サブシステムによってキャプチャされかつバッファされた画像を処理しかつ表された1-D及び2-Dバーコード・シンボルを読取る画像処理ベース・バーコード・シンボル読取りサブシステムと;
処理した画像データを外部ホスト・システムまたは他の情報受信または応答デバイスに出力する入出力サブシステムと;及び
一又はそれ以上の上述した前記サブシステムを制御するシステム制御サブシステムと;
を備え、
前記CMOS領域型画像感知アレイの全ての行が集積の状態にあり、かつ共通の集積時間を有する場合のみに、前記LED照明アレイは、正確な方法で駆動され、前記CMOS領域型画像検出アレイの画素の全ての行が、同時に狭帯域の前記LEDベース照明に露出される、
ことを特徴とするハンド-サポータブル・デジタル・イメージング・ベース・バーコード・シンボル読取りデバイス。 - 前記FOV内の物体検出フィールドを生成する物体存在及び範囲検出サブシステムと;
前記FOVの中心部分に入射する露光を自動的に測定し、かつ前記LEDベース照明サブシステムの動作を制御する自動露光測定及び照明制御サブシステムと、
を更に備えている、
ことを特徴とする請求項7に記載のハンド-サポータブル・デジタル・イメージング・ベース・バーコード・シンボル読取りデバイス。 - 前記ハンド-サポータブル筐体は、前面及び当該前面に形成された光透過開口を有し;
かつ
前記狭帯域透過型光学フィルタ・サブシステムは、前記狭帯域マルチ-モード照明サブシステムから生成された可視照明の620〜700ナノメートルの波長だけを透過し、かつしかしながら生成されたこの狭い光学帯域以外の全ての他の光学波長(即ち、周囲光源)を拒み;
前記狭帯域透過型光学フィルタ・サブシステムは、波長の第1の帯域を透過する前記光透過開口内に組み込まれた第1の光学フィルタと、波長の第2の帯域する、前記CMOS画像感知アレイの前に配置された、第2の光学フィルタとを含み;かつ
前記第1及び第2の光学フィルタは、波長の前記狭帯域を透過する前記狭帯域透過型光学フィルタ・サブシステムを形成すべく協調する、
ことを特徴とする請求項7に記載のハンド-サポータブル・デジタル・イメージング・ベース・バーコード・シンボル読取りデバイス。 - 前記第1の光学フィルタ素子は、620ナノメートル以下の光学波長を透過し、かつ620nm以上の光学波長を阻止し、
前記第2の光学フィルタ素子は、700ナノメートルを超える光学波長を透過し、かつ700nmを下回る光学波長を阻止する、
ことを特徴とする請求項9に記載のハンド-サポータブル・デジタル・イメージング・ベース・バーコード・シンボル読取りデバイス。 - 前記第1の光学フィルタ素子は、ユーザに対して赤色に見えるようにする、
ことを特徴とする請求項9に記載のハンド-サポータブル・デジタル・イメージング・ベース・バーコード・シンボル読取りデバイス。 - 既定の作動範囲を有しているデジタル・イメージング・ベース・バーコード・シンボル読取りデバイスであって、
物体が画像形成される視野(FOV)を生成する画像形成光学系、及び画像感知アレイの全ての行が有効にされる画像キャプチャ・モードにおいて照明動作中に物体から反射された画像形成された光を検出し、かつ前記領域型画像感知アレイの画素の全ての行が集積動作の状態にある場合に、第1の制御起動信号を自動的に生成する領域型画像感知アレイを有している画像形成及び検出サブシステムと;
LED照明アレイから前記FOV内でLEDベース照明を自動的に生成するLEDベース照明サブシステムと;
前記デバイスの作動範囲内で前記FOVの相当な部分を空間的に取り囲む物体検出フィールドを自動的に生成し、かつ前記FOV内で物体の存在を検出しかつそれに応じて前記第2の制御起動信号を生成する自動物体存在検出サブシステムと;
前記LED照明アレイからLEDベース照明を生成しかつ物体照明及び帯画像キャプチャ動作中にそれにより前記検出された物体を照明するように、前記第1及び第2の制御起動信号の両方の生成に応じて、前記LED照明アレイの動作を制御し、前記CMOS領域型画像感知アレイの全ての行が集積の状態にありかつ共通の集積時間を有する場合のみに、前記LED照明のアレイは、正確な方法で駆動され、前記CMOS領域型画像検出アレイにおける画素の全ての行が、同時に狭帯域の前記LEDベース照明に露出される自動露光測定及び照明制御サブシステムと;
前記照明された物体のデジタル画像をキャプチャリングしかつバッファリングする画像キャプチャリング及びバッファリング・サブシステムと;
前記画像キャプチャリング及びバッファリング・サブシステムによってキャプチャされかつバッファされた前記デジタル画像を処理し、かつその中に図式的に表された1D及び2Dバーコード・シンボルを読取る画像処理ベース・バーコード・シンボル読取りサブシステムと;
処理された画像データを外部ホスト・システムまたは他の情報受信または応答デバイスへ出力する入出力サブシステムと;
前記サブシステムの動作を制御しかつ協調させるシステム制御サブシステムと;及び
前記サブシステムを収容し、そしてそれを通して前記FOVが拡張し、前記LEDベース照明が投影され、かつ前記物体から反射されかつ散乱された光が透過されるイメージング・ウィンドウを有する光透過パネルを有している筐体とを備えている、
ことを特徴とするデジタル・イメージング・ベース・バーコード・シンボル読取りデバイス。 - 前記第1のLED照明アレイは、前記光透過パネルの上下部分に取り付けられた、レンズなしの二組の(フラットトップ)LED光源を含む、
ことを特徴とする請求項12に記載のデジタル・イメージング・ベース・バーコード・シンボル読取りデバイス。 - 前記第2のLED照明アレイは、前記光透過パネルの上下部分に取り付けられた、球面(即ち、平凸)レンズが設けられた二組のLED光源を更に含む、
ことを特徴とする請求項13に記載のデジタル・イメージング・ベース・バーコード・シンボル読取りデバイス。 - 前記物体検出フィールド及び前記FOVは、前記所定の作動範囲の相当な部分に沿って空間的に重なり合う、
ことを特徴とする請求項12に記載のデジタル・イメージング・ベース・バーコード・シンボル読取りデバイス。 - 前記自動物体存在検出サブシステムは、前記物体検出フィールドが近視野部分及び遠視野部分を有しているIRベース物体検出フィールドである、IRベース自動物体存在及び範囲検出サブシステムである、
ことを特徴とする請求項12に記載のデジタル・イメージング・ベース・バーコード・シンボル読取りデバイス。 - 前記自動物体存在検出サブシステムは、物体に対して前記物体検出フィールドを連続的に監視するためにシステム開始で起動されかつ前記システム制御サブシステムに前記物体検出フィールドの遠及び近部分の両方内で物体の状態に関する情報を供給する、
ことを特徴とする請求項16に記載のデジタル・イメージング・ベース・バーコード・シンボル読取りデバイス。 - 前記領域型画像感知アレイは、CMOS領域感知アレイを備えている、
ことを特徴とする請求項12に記載のデジタル・イメージング・ベース・バーコード・シンボル読取りデバイス。 - 前記筐体は、ハンド-サポータブルである、
ことを特徴とする請求項12に記載のデジタル・イメージング・ベース・バーコード・シンボル読取りデバイス。 - 前記筐体は、カウンタートップ-サポータブルである、
ことを特徴とする請求項12に記載のデジタル・イメージング・ベース・バーコード・シンボル読取りデバイス。 - 作動範囲を有しているハンド-サポータブル・デジタル・イメージング・ベース・バーコード・シンボル読取りデバイスであって、
イメージング・ウィンドウを有する光透過パネルを有しているハンド-サポータブル筐体と;
(i)前記イメージング・ウィンドウを通りかつ物体が画像形成される視野(FOV)を生成する画像形成光学系、及び(ii)画像感知アレイの全ての行が有効にされる画像キャプチャ・モードにおいて照明動作中に物体から反射された画像形成された光を検出し、かつ前記CMOS領域型画像感知アレイの画素の全ての行が集積動作の状態にある場合に、第1の制御起動信号を自動的に生成するCMOS領域型画像感知アレイを有している画像形成及び検出サブシステムと;
前記LED照明アレイから、前記イメージング・ウィンドウを通って前記FOVに投影される狭帯域LEDベース照明のフィールドを自動的に生成するLEDベース照明サブシステムと;
前記作動範囲の相当な部分にわたり前記FOVと空間的に重なり合う物体検出フィールドを自動的に生成し、かつ前記物体検出フィールド内で物体の存在を自動的に検出しかつそれに応じて前記第2の制御起動信号を生成する自動物体存在検出サブシステムと;
(i)前記FOVの中心部分に入射する露光を自動的に測定する露光測定回路と、及び(ii)前記CMOS領域型画像検出アレイの画素の実質的に全ての行が集積の状態にありかつ共通の集積時間を有する場合にだけ前記CMOS領域型画像検出アレイの画素の全ての行が、前記狭帯域LEDベース照明に同時に露出される正確な方法で、前記LED照明アレイが駆動されるように、前記第1及び第2の制御起動信号の両方の生成に応じて前記LED照明アレイの動作を制御するLED照明ドライバ回路とを有している、自動露光測定及び照明制御サブシステムと;
前記バーコード・シンボル読取りデバイスと前記照明された物体との間の相対運動に係わりなく前記照明された物体のデジタル画像をキャプチャリングしかつバッファリングする画像キャプチャリング及びバッファリング・サブシステムと;
前記画像キャプチャリング及びバッファリング・サブシステムによってキャプチャされかつバッファされた前記デジタル画像を処理し、かつその中に図式的に表された1D及び2Dバーコード・シンボルを読取る画像処理ベース・バーコード・シンボル読取りサブシステムと;
一又はそれ以上の前記サブシステムの動作を制御しかつ協調させるシステム制御サブシステムとを備えている、
ことを特徴とするハンド-サポータブル・デジタル・イメージング・ベース・バーコード・シンボル読取りデバイス。 - 処理された画像データを外部ホスト・システムまたは他の情報受信または応答デバイスへ出力する入出力サブシステムを更に備えている、
ことを特徴とする請求項21に記載のハンド-サポータブル・デジタル・イメージング・ベース・バーコード・シンボル読取りデバイス。 - 前記第1のLED照明アレイは、前記光透過パネルの上下部分に取り付けられた、レンズなしの二組の(フラットトップ)LED光源を含む、
ことを特徴とする請求項21に記載のハンド-サポータブル・デジタル・イメージング・ベース・バーコード・シンボル読取りデバイス。 - 前記第2のLED照明アレイは、前記光透過パネルの上下部分に取り付けられた、球面(即ち、平凸)レンズが設けられた二組のLED光源を更に含む、
ことを特徴とする請求項23に記載のハンド-サポータブル・デジタル・イメージング・ベース・バーコード・シンボル読取りデバイス。 - 前記物体検出フィールドは、IRベース物体存在検出フィールドであり、かつ前記IRベース物体存在検出フィールドは、前記作動範囲の相当な部分にわたり前記FOVと空間的に重なり合う、
ことを特徴とする請求項21に記載のハンド-サポータブル・デジタル・イメージング・ベース・バーコード・シンボル読取りデバイス。 - 作動範囲を有しているデジタル・イメージング・ベース・バーコード・シンボル読取りシステムであって、
イメージング・ウィンドウを有する光透過パネルを有しているハンド-サポータブル筐体と;
その上に物体が画像形成される視野(FOV)を生成する画像形成光学系、及び画像感知アレイの全ての行が有効にされる画像キャプチャ・モードにおいて照明動作中に物体から反射された画像形成された光を検出し、かつ前記CMOS領域型画像感知アレイの画素の全ての行が集積動作の状態にある場合に、第1の制御起動信号を自動的に生成するCMOS領域型画像感知アレイを有している画像形成及び検出サブシステムと;
(i)前記LEDベース照明サブシステムから伝送された、(ii)前記照明された物体から反射/散乱された、及び(iii)前記CMOS領域型画像感知アレイの前に配置された狭帯域伝送型光学フィルタ・サブシステムを通って伝送された、狭帯域照明だけが前記CMOS領域型画像感知アレイによって検出されると同時に、周囲光の全ての他の構成要素が拒まれるように、前記画像キャプチャ・モード中にLED照明アレイから前記FOV内で狭帯域照明のフィールドを自動的に生成するLEDベース照明サブシステムと;
前記作動範囲の相当な部分に沿って前記FOVを空間的に取り囲む物体検出フィールドを自動的に生成し、かつ前記物体検出フィールド内で物体の存在を自動的に検出しかつそれに応じて前記第2の制御起動信号を生成する自動物体存在検出サブシステムと;
前記FOVの中心部分に入射する露光を自動的に測定し、かつ前記CMOS領域型画像検出アレイの画素の全ての行が集積の状態にありかつ共通の集積時間を有する場合にだけ前記CMOS領域型画像検出アレイの画素の全ての行が、前記狭帯域照明に同時に露出される正確な方法で前記LED照明アレイが駆動されるように、物体照明及びイメージング動作中に前記LED照明アレイの動作を制御する自動露光測定及び照明制御サブシステムと;
前記CMOS領域型画像検出アレイが前記狭帯域照明に露出する時間分は、前記LED照明アレイが前記第1及び第2の制御起動信号の生成に応じて狭帯域照明の前記フィールドを生成する時間を制御している前記自動露光測定及び照明制御サブシステムによって管理され;
前記システムと前記照明された物体との間の相対運動に係わりなく前記照明された物体のデジタル画像をキャプチャリングしかつバッファリングする画像キャプチャリング及びバッファリング・サブシステムと;
前記画像キャプチャリング及びバッファリング・サブシステムによってキャプチャされかつバッファされた前記デジタル画像を処理し、かつその中に図式的に表された1D及び2Dバーコード・シンボルを読取る画像処理ベース・バーコード・シンボル読取りサブシステムと;
一又はそれ以上の前記サブシステムの動作を制御しかつ協調させるシステム制御サブシステムと;
前記サブシステムを収容し、そしてそれを通して前記FOVが拡張し、前記狭帯域照明が投影され、かつ前記物体から反射されかつ散乱された狭帯域照明が前記CMOS領域型画像感知アレイの方向に再透過されるイメージング・ウィンドウを有する光透過パネルを有している筐体と、
を備えている、
ことを特徴とするデジタル・イメージング・ベース・バーコード・シンボル読取りシステム。 - 前記LED照明アレイは、前記光透過パネルの上下部分に取り付けられた、レンズなしの二組の(フラットトップ)LED光源を含む、
ことを特徴とする請求項26に記載のデジタル・イメージング・ベース・バーコード・シンボル読取りシステム。 - 前記LED照明アレイは、前記光透過パネルの上下部分に取り付けられた、球面(即ち、平凸)レンズが設けられた二組のLED光源を更に含む、
ことを特徴とする請求項27に記載のデジタル・イメージング・ベース・バーコード・シンボル読取りシステム。 - 処理された画像データを外部ホスト・システムまたは他の情報受信または応答デバイスへ出力する入出力サブシステムを更に備えている、
ことを特徴とする請求項26に記載のデジタル・イメージング・ベース・バーコード・シンボル読取りシステム。 - 前記物体検出フィールドは、IRベース物体検出フィールドであり、かつ前記IRベース物体検出フィールド及び前記FOVは、前記システムの作動範囲の相当な部分に沿って前記FOVと空間的に重なり合うフィールドである、
ことを特徴とする請求項29に記載のデジタル・イメージング・ベース・バーコード・シンボル読取りシステム。 - 前記自動物体存在検出サブシステムは、前記物体検出フィールドの近部分又は遠部分内で検出された物体の範囲を検出する手段を更に備え、かつ前記第2の制御起動信号は、(i)検出された物体が前記物体検出フィールドの前記近部分内で検出されることを示す第1の型の第2の制御起動信号と、及び(ii)検出された物体が前記物体検出フィールドの前記遠部分内で検出されることを示す第2の型の第2の制御起動信号とを備えている、
ことを特徴とする請求項29に記載のデジタル・イメージング・ベース・バーコード・シンボル読取りシステム。 - 前記LED照明アレイは、前記物体検出フィールドの前記近部分にわたり狭帯域照明のフィールドを生成する第1のLED照明アレイと、前記物体検出フィールドの前記遠部分にわたり狭帯域照明のフィールドを生成する第2のLED照明アレイとを備え;かつ
前記自動露光測定及び照明制御サブシステムは、CMOS領域型画像感知アレイが前記第1又は第2のLEDベース照明アレイからの狭帯域照明に露出される時間分は、LEDベース照明アレイが前記第1及び第2の制御起動信号に応じて狭帯域照明を生成する時間を制御することによって管理されるように、前記第1又は第2のLED照明アレイのいずれかを自動的に駆動するために前記第1の制御起動信号及び第1及び第2の型の第2の制御起動信号に応答する、
ことを特徴とする請求項31に記載のデジタル・イメージング・ベース・バーコード・シンボル読取りシステム。 - 前記筐体は、ハンド-サポータブルである、
ことを特徴とする請求項26に記載のデジタル・イメージング・ベース・バーコード・シンボル読取りシステム。 - 前記筐体は、カウンタートップ-サポータブルである、
ことを特徴とする請求項26に記載のデジタル・イメージング・ベース・バーコード・シンボル読取りシステム。
Applications Claiming Priority (27)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| US10/712,787 US7128266B2 (en) | 2003-11-13 | 2003-11-13 | Hand-supportable digital imaging-based bar code symbol reader supporting narrow-area and wide-area modes of illumination and image capture |
| US10/893,800 US7273180B2 (en) | 2003-11-13 | 2004-07-16 | Hand-supportable imaging-based bar code symbol reader having a multi-mode bar code symbol image processor dynamically reconfigurable in response to real-time image processing operations carried out on captured images |
| US10/893,797 US7188770B2 (en) | 2003-11-13 | 2004-07-16 | Hand-supportable semi-automatic imaging-based bar code reading system wherein an led-based illumination subsystem automatically illuminates a detected target object in a narrow-area field of illumination, and illuminates the detected target object in a wide-area field of illumination upon manual activation of a trigger switch |
| US10/893,798 US7185817B2 (en) | 2003-11-13 | 2004-07-16 | Hand-supportable digital imaging-based bar codes symbol reader employing multi-mode subsystems |
| US10/894,476 US7178733B2 (en) | 2003-11-13 | 2004-07-16 | Hand-supportable imaging-based bar code symbol reader employing automatic object presence and range detection to control the generation of near-field and far-field wide-area illumination during bar code symbol imaging operations |
| US10/894,478 US7357325B2 (en) | 2003-11-13 | 2004-07-19 | Hand-supportable imaging-based bar code symbol reader employing a CMOS-type image sensor using global exposure techniques |
| US10/894,412 US7213762B2 (en) | 2003-11-13 | 2004-07-19 | Hand-supportable imaging-based bar code symbol reader employing a CMOS-type image sensing array in combination with a band-pass optical filter subsystem, narrow-band illumination subsystem, and automatic light exposure measurement and illumination control subsystem |
| US10/894,477 US7360706B2 (en) | 2003-11-13 | 2004-07-19 | Hand-supportable imaging-based auto-discriminating 1D/2D bar code symbol reader employing a multi-mode image processing bar code symbol reading subsystem having a plurality of modes of operation which are dynamically reconfigurable in response to real-time image analysis |
| US10/895,271 US7216810B2 (en) | 2003-11-13 | 2004-07-20 | Hand-supportable multi-mode digital imaging-based bar code symbol reader employing an automatic illumination and exposure control subsystem that automatically controls the operation of a multi-mode led-based illumination subsystem so that detected objects are sufficiently illuminated and good quality digital images thereof are formed and detected |
| US10/895,811 US7225988B2 (en) | 2003-11-13 | 2004-07-20 | Hand-supportable imaging-based bar code symbol reader employing a tri-mode led-based illumination subsystem |
| US10/897,390 US7237722B2 (en) | 2003-11-13 | 2004-07-22 | Hand-supported imaging-based bar code symbol reader employing a multi-mode image-processing based bar code reading subsystem with modular image-processing architecture |
| US10/897,389 US7225989B2 (en) | 2003-11-13 | 2004-07-22 | Method of performing auto-discrimination of 1D/2D bar code symbologies in a semi-automatic hand-supportable imaging-based bar code symbol reader having narrow-area and wide-area image capture modes of operation |
| US10/901,426 US7278575B2 (en) | 2003-11-13 | 2004-07-27 | Hand-supportable image-based bar code symbol reader employing helically-sweeping feature-extraction analysis on a captured digital image of an object referenced from the center thereof |
| US10/901,446 US7428998B2 (en) | 2003-11-13 | 2004-07-27 | Automatic hand-supportable image-based bar code symbol reader having image-processing based bar code reading subsystem employing simple decode image processing operations applied in an outwardly-directed manner referenced from the center of a captured narrow-area digital image of an object bearing a 1D bar code symbol |
| US10/901,463 US7086595B2 (en) | 2003-11-13 | 2004-07-27 | Method of and apparatus for processing captured digital images of objects within a semi-automatic hand-supportable imaging-based bar code symbol reader so as to read 1d and/or 2d bar code symbols graphically represented therein |
| US10/901,428 US7293714B2 (en) | 2003-11-13 | 2004-07-28 | Hand-supportable digital imaging-based bar code symbol reading system automatically processing captured images along parallel virtual scan lines based on the maximum pixel height of the region of interest (ROI) |
| US10/901,427 US7267282B2 (en) | 2003-11-13 | 2004-07-28 | Hand-supportable imaging-based bar code symbol reader capable of exposing an automatically detected object to a field of narrow-band LED-based illumination only when substantially all rows of pixels in a CMOS image sensing array are in a state of integration |
| US10/901,445 US7240844B2 (en) | 2003-11-13 | 2004-07-28 | Hand-suportable imaging-based bar code symbol reader employing an automatic light exposure measurement and illumination control subsystem for measuring illumination exposure on CMOS image sensing array and controlling LED illumination array driver circuitry |
| US10/901,429 US7243847B2 (en) | 2003-11-13 | 2004-07-28 | Digital imaging-based bar code symbol reader employing an LED-based illumination subsystem driven by an automatic light exposure measurement and illumination control subsystem |
| US10/901,461 US7320431B2 (en) | 2003-11-13 | 2004-07-28 | Digital imaging-based bar code symbol reading system employing a multi-mode illumination subsystem with far-field and near field led-based illumination arrays |
| US10/902,710 US7281661B2 (en) | 2003-11-13 | 2004-07-29 | Hand-supportable digital imaging-based bar code symbol reading system employing a method of intelligently illuminating an object so as to generate a digital image thereof which is substantially free of noise caused by specular-type reflection |
| US10/901,914 US7325738B2 (en) | 2003-11-13 | 2004-07-29 | Method of and system for determining the lower limit of decoding resolution in an imaging-based bar code symbol reader |
| US10/902,709 US7270272B2 (en) | 2003-11-13 | 2004-07-29 | Digital image-based bar code symbol reading system employing a multi-mode image-processing symbol reading subsystem |
| US10/909,255 US7299986B2 (en) | 2003-11-13 | 2004-07-30 | Digital imaging-based bar code symbol driven portable data terminal system |
| US10/903,904 US7255279B2 (en) | 2003-11-13 | 2004-07-30 | Hand-supportable digital imaging-based bar code reading system wherein, during each imaging cycle, a single frame of pixel data is automatically detected by a CMOS area-type image sensing array when substantially all rows of pixels therein are in a state of integration and have a common integration time, and then pixel data is transmitted from said CMOS area-type image sensing array into a FIFO buffer, and then mapped into memory for subsequent image processing |
| US10/909,270 US7284705B2 (en) | 2003-11-13 | 2004-07-30 | Hand-supportable semi-automatic digital imaging-based bar code symbol reading system realized upon a multi-tier modular software platform |
| PCT/US2004/038389 WO2005050390A2 (en) | 2003-11-13 | 2004-11-15 | Hand-supportable imaging-based bar code symbol reader supporting narrow-area and wide-area modes of illumination and image capture |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2007521575A JP2007521575A (ja) | 2007-08-02 |
| JP2007521575A5 JP2007521575A5 (ja) | 2007-12-27 |
| JP4586026B2 true JP4586026B2 (ja) | 2010-11-24 |
Family
ID=34624197
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2006540001A Expired - Lifetime JP4586026B2 (ja) | 2003-11-13 | 2004-11-15 | 照明及び画像キャプチャの狭域及び広域モードを支援するハンド・サポート可能なイメージング・ベース・バーコード・シンボル読取り装置 |
Country Status (4)
| Country | Link |
|---|---|
| EP (1) | EP1690162B1 (ja) |
| JP (1) | JP4586026B2 (ja) |
| CA (1) | CA2546289A1 (ja) |
| WO (1) | WO2005050390A2 (ja) |
Families Citing this family (37)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US7954719B2 (en) | 2000-11-24 | 2011-06-07 | Metrologic Instruments, Inc. | Tunnel-type digital imaging-based self-checkout system for use in retail point-of-sale environments |
| US9092841B2 (en) | 2004-06-09 | 2015-07-28 | Cognex Technology And Investment Llc | Method and apparatus for visual detection and inspection of objects |
| US8891852B2 (en) | 2004-06-09 | 2014-11-18 | Cognex Technology And Investment Corporation | Method and apparatus for configuring and testing a machine vision detector |
| US8127247B2 (en) | 2004-06-09 | 2012-02-28 | Cognex Corporation | Human-machine-interface and method for manipulating data in a machine vision system |
| US8243986B2 (en) | 2004-06-09 | 2012-08-14 | Cognex Technology And Investment Corporation | Method and apparatus for automatic visual event detection |
| US20050276445A1 (en) | 2004-06-09 | 2005-12-15 | Silver William M | Method and apparatus for automatic visual detection, recording, and retrieval of events |
| US9292187B2 (en) | 2004-11-12 | 2016-03-22 | Cognex Corporation | System, method and graphical user interface for displaying and controlling vision system operating parameters |
| US7636449B2 (en) | 2004-11-12 | 2009-12-22 | Cognex Technology And Investment Corporation | System and method for assigning analysis parameters to vision detector using a graphical interface |
| US7568628B2 (en) | 2005-03-11 | 2009-08-04 | Hand Held Products, Inc. | Bar code reading device with global electronic shutter control |
| US7770799B2 (en) | 2005-06-03 | 2010-08-10 | Hand Held Products, Inc. | Optical reader having reduced specular reflection read failures |
| KR20060129117A (ko) | 2005-06-10 | 2006-12-15 | 삼성전자주식회사 | 바코드를 이용하는 전자레인지의 제어장치 및 방법 |
| US8181878B2 (en) | 2006-01-25 | 2012-05-22 | Cognex Technology And Investment Corporation | Method and apparatus for providing a focus indication for optical imaging of visual codes |
| JP5115131B2 (ja) * | 2007-10-11 | 2013-01-09 | 株式会社デンソーウェーブ | 光学的情報読取装置 |
| EP2071490A1 (de) * | 2007-12-07 | 2009-06-17 | Agfa HealthCare NV | Vorrichtung und Verfahren zum Identifizieren eines Objekts |
| US8353457B2 (en) | 2008-02-12 | 2013-01-15 | Datalogic ADC, Inc. | Systems and methods for forming a composite image of multiple portions of an object from multiple perspectives |
| US8608076B2 (en) | 2008-02-12 | 2013-12-17 | Datalogic ADC, Inc. | Monolithic mirror structure for use in a multi-perspective optical code reader |
| EP2248069B1 (en) | 2008-02-12 | 2013-08-28 | Datalogic ADC, Inc. | Systems and methods for forming a composite image of multiple portions of an object from multiple perspectives |
| US8678287B2 (en) | 2008-02-12 | 2014-03-25 | Datalogic ADC, Inc. | Two-plane optical code reader for acquisition of multiple views of an object |
| US8261990B2 (en) | 2008-12-26 | 2012-09-11 | Datalogic ADC, Inc. | Data reader having compact arrangement for acquisition of multiple views of an object |
| US8322621B2 (en) | 2008-12-26 | 2012-12-04 | Datalogic ADC, Inc. | Image-based code reader for acquisition of multiple views of an object and methods for employing same |
| EP2382583B1 (en) | 2008-12-26 | 2016-09-21 | Datalogic ADC, Inc. | Systems and methods for imaging |
| EP2545491B1 (en) | 2010-03-11 | 2015-05-06 | Datalogic IP TECH S.r.l. | Image capturing device |
| US10498933B2 (en) | 2011-11-22 | 2019-12-03 | Cognex Corporation | Camera system with exchangeable illumination assembly |
| US8947590B2 (en) | 2011-11-22 | 2015-02-03 | Cognex Corporation | Vision system camera with mount for multiple lens types |
| US11366284B2 (en) | 2011-11-22 | 2022-06-21 | Cognex Corporation | Vision system camera with mount for multiple lens types and lens module for the same |
| US9651499B2 (en) | 2011-12-20 | 2017-05-16 | Cognex Corporation | Configurable image trigger for a vision system and method for using the same |
| US8847150B2 (en) | 2012-10-08 | 2014-09-30 | Symbol Technologies, Inc. | Object detecting system for imaging-based barcode readers |
| US9746636B2 (en) | 2012-10-19 | 2017-08-29 | Cognex Corporation | Carrier frame and circuit board for an electronic device |
| US9111163B2 (en) | 2013-07-31 | 2015-08-18 | Symbol Technologies, Llc | Apparatus for and method of electro-optically reading a selected target by image capture from a picklist of targets |
| US9269454B1 (en) * | 2014-12-03 | 2016-02-23 | Winbound Electronics Corporation | Counter using one-time-programmable memory |
| CN106874818B (zh) | 2016-08-30 | 2019-11-22 | 阿里巴巴集团控股有限公司 | 一种数字对象唯一标识符doi识别方法与装置 |
| JP6994413B2 (ja) * | 2018-03-05 | 2022-01-14 | 東芝テック株式会社 | 撮像装置および商品撮像装置 |
| CN109559305B (zh) * | 2018-11-26 | 2023-06-30 | 易思维(杭州)科技有限公司 | 一种基于soc-fpga的线结构光图像快速处理系统 |
| CN111243500B (zh) * | 2018-11-29 | 2022-02-11 | 上海和辉光电股份有限公司 | 显示面板 |
| US11592809B2 (en) | 2019-11-29 | 2023-02-28 | Rohde & Schwarz Gmbh & Co. Kg | System and method for measurement data management in a distributed environment |
| CN111695257B (zh) * | 2020-06-11 | 2023-04-11 | 业成科技(成都)有限公司 | Led布局的生成方法、装置、计算机设备和可读存储介质 |
| US11314959B1 (en) * | 2021-06-30 | 2022-04-26 | Datalogic Ip Tech S.R.L. | System and method for identification and quantification of types of failure in automated reading of barcodes |
Family Cites Families (9)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US5140146A (en) * | 1989-11-20 | 1992-08-18 | Symbol Technologies, Inc. | Bar code symbol reader with modulation enhancement |
| US5258605A (en) * | 1990-03-13 | 1993-11-02 | Symbol Technologies, Inc. | Scan generators for bar code reader using linear array of lasers |
| EP0631679B1 (en) * | 1992-03-12 | 1999-10-13 | Norand Corporation | Reader for decoding two-dimensional optical information |
| US5446271A (en) * | 1993-08-06 | 1995-08-29 | Spectra-Physics Scanning Systems, Inc. | Omnidirectional scanning method and apparatus |
| JP2781716B2 (ja) * | 1993-09-28 | 1998-07-30 | 株式会社テック | シンボル読取装置 |
| US5521366A (en) * | 1994-07-26 | 1996-05-28 | Metanetics Corporation | Dataform readers having controlled and overlapped exposure integration periods |
| JPH09259215A (ja) * | 1996-03-26 | 1997-10-03 | Tec Corp | コードリーダ |
| CA2288758C (en) * | 1997-05-05 | 2007-07-17 | Alexander R. Roustaei | Optical scanner and image reader for reading images and decoding optical information including one and two dimensional symbologies at variable depth of field |
| EP1717728B1 (en) * | 2001-01-22 | 2010-09-01 | Hand Held Products, Inc. | Optical reader having partial frame operating mode |
-
2004
- 2004-11-15 JP JP2006540001A patent/JP4586026B2/ja not_active Expired - Lifetime
- 2004-11-15 WO PCT/US2004/038389 patent/WO2005050390A2/en active Application Filing
- 2004-11-15 CA CA002546289A patent/CA2546289A1/en not_active Abandoned
- 2004-11-15 EP EP04811195A patent/EP1690162B1/en not_active Expired - Lifetime
Also Published As
| Publication number | Publication date |
|---|---|
| CA2546289A1 (en) | 2005-06-02 |
| EP1690162A2 (en) | 2006-08-16 |
| WO2005050390A2 (en) | 2005-06-02 |
| EP1690162A4 (en) | 2010-06-09 |
| EP1690162B1 (en) | 2012-01-18 |
| WO2005050390A3 (en) | 2006-04-27 |
| JP2007521575A (ja) | 2007-08-02 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP4586026B2 (ja) | 照明及び画像キャプチャの狭域及び広域モードを支援するハンド・サポート可能なイメージング・ベース・バーコード・シンボル読取り装置 | |
| US7490778B2 (en) | Method of reading code symbols using a hand-supportable digital image capturing and processing device employing a micro-computing platform supporting an event-driven multi-tier modular software architecture | |
| US7624926B2 (en) | Method of automatically reading code symbols on objects present within the field of view (FOV) of a hand-supportable digital-imaging based code symbol reader, by simultaneously projecting an image cropping zone (ICZ) framing pattern and a field of illumination within the FOV during object illumination and imaging operations | |
| US7270272B2 (en) | Digital image-based bar code symbol reading system employing a multi-mode image-processing symbol reading subsystem |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20071108 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20071108 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20091119 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20091214 |
|
| A601 | Written request for extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A601 Effective date: 20100303 |
|
| A602 | Written permission of extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A602 Effective date: 20100310 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20100614 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20100806 |
|
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20100906 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 4586026 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20130910 Year of fee payment: 3 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |