JP4526284B2 - Endoscope device - Google Patents
Endoscope device Download PDFInfo
- Publication number
- JP4526284B2 JP4526284B2 JP2004079263A JP2004079263A JP4526284B2 JP 4526284 B2 JP4526284 B2 JP 4526284B2 JP 2004079263 A JP2004079263 A JP 2004079263A JP 2004079263 A JP2004079263 A JP 2004079263A JP 4526284 B2 JP4526284 B2 JP 4526284B2
- Authority
- JP
- Japan
- Prior art keywords
- bending
- pulley unit
- unit
- pulley
- protrusion
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
- 0 C(C1)C2C1*CCC2 Chemical compound C(C1)C2C1*CCC2 0.000 description 1
Images

































Landscapes
- Instruments For Viewing The Inside Of Hollow Bodies (AREA)
- Endoscopes (AREA)
Description
本発明は、細長な内視鏡の挿入部の先端部分に湾曲部を有する内視鏡装置に関する。 The present invention relates to an endoscope apparatus having a curved portion at a distal end portion of an insertion portion of an elongated endoscope.
近年、内視鏡は、医療分野及び工業用分野において広く利用されている。医療分野において用いられる内視鏡は、細長い挿入部を体腔内に挿入することによって、体腔内の臓器を観察したり、必要に応じて処置具の挿通チャンネル内に挿入した処置具を用いて各種処置をしたりすることができる。 In recent years, endoscopes are widely used in the medical field and the industrial field. Endoscopes used in the medical field include various types of treatment tools that are used to observe organs in a body cavity by inserting an elongated insertion portion into a body cavity, or inserted into an insertion channel of a treatment tool as necessary. Can be treated.
また、工業用分野において用いられる内視鏡は、細長い挿入部をボイラー,ガスタービンエンジン,または化学プラント等の配管,自動車エンジンのボディ等に挿入することによって、被検部位の傷及び腐蝕等の観察、並びに検査等を行うことができる。 In addition, endoscopes used in the industrial field are designed to prevent damage and corrosion of a test site by inserting a long and thin insertion portion into piping of a boiler, a gas turbine engine, or a chemical plant, or the body of an automobile engine. Observation, inspection, etc. can be performed.
このような内視鏡の挿入部の先端には、湾曲部及び先端部が設けられている。使用者は、内視鏡内に挿通された湾曲部から延出する操作ワイヤ等の牽引部材を、内視鏡の操作部の所定操作により牽引弛緩させることにより、湾曲部を湾曲させ、先端部内に配設された観察光学系の対物レンズの観察方向を変更させることができる。 A bending portion and a distal end portion are provided at the distal end of the insertion portion of such an endoscope. The user bends and pulls a pulling member such as an operation wire extending from the bending portion inserted into the endoscope by a predetermined operation of the operation portion of the endoscope, thereby bending the bending portion, It is possible to change the observation direction of the objective lens of the observation optical system disposed in the.
また、内視鏡には、湾曲部を所定の湾曲動作の範囲においてのみ動作させるために、操作ワイヤの動きを制限する停止部材又は制御回路が設けられるものがある。 Some endoscopes are provided with a stop member or a control circuit for restricting the movement of the operation wire in order to operate the bending portion only within a predetermined bending operation range.
例えば、実公平6−41532号公報に開示されている内視鏡の湾曲操作装置は、操作ワイヤが装置内部に設けられた回転ドラムによって進退移動し、内視鏡の湾曲部の湾曲動作を行う。また、この湾曲操作装置には、停止部材である第1のストッパ機構が過大な回転ドラムの回動量によって内視鏡の湾曲部に必要以上の負荷を与えないように、操作ワイヤの進退移動が制限される停止部材及び衝当部材が設けられている。さらに、この湾曲部操作装置には、想定以上の過負荷でも湾曲部の動きを規制できるように、回転ドラムの回動を制限する、第1のストッパ機構よりも強固な第2のストッパ機構が設けられている。 For example, in an endoscope bending operation device disclosed in Japanese Utility Model Publication No. 6-41532, an operation wire is moved forward and backward by a rotating drum provided inside the device, and the bending portion of the endoscope is bent. . Further, in this bending operation device, the operation wire moves forward and backward so that the first stopper mechanism as a stop member does not apply an excessive load to the bending portion of the endoscope due to an excessive amount of rotation of the rotating drum. Restricted stop members and impact members are provided. Further, the bending portion operating device has a second stopper mechanism that is stronger than the first stopper mechanism and restricts the rotation of the rotating drum so that the movement of the bending portion can be restricted even with an overload more than expected. Is provided.
次に、上記制御回路は、例えば、特許第3092980号号公報に開示されている。この制御回路を有する内視鏡は、ユーザの手動によるプーリの回動ではなく、モータなどを用いた電動式の駆動手段によってプーリが回動されることによって、内視鏡の湾曲部が湾曲操作される。この内視鏡には、プーリを回動させる駆動手段を電気的に制御する制御装置が備わっている。制御装置は、プーリの回動量を制御し、プーリの最大回動量の範囲を制限している。
しかしながら、実公平6−41532号公報に示される第1及び第2のストッパ機構を有する内視鏡は、第1のストッパ機構に加えられる負荷が高くなるとともに、第1停止部材と第1衝当部材の夫々の溝と突部との当接量が所定量だけ必要とされる。さらに、夫々の溝と突部が当接する十分な操作ワイヤの進退移動停止のための当接面が確保されず、操作ワイヤの移動時の停止強度が低下する問題がある。 However, in the endoscope having the first and second stopper mechanisms disclosed in Japanese Utility Model Publication No. 6-41532, the load applied to the first stopper mechanism is increased, and the first stop member and the first abutment are applied. A predetermined amount of contact between each groove and the protrusion of the member is required. Furthermore, there is a problem that a sufficient abutment surface for stopping the advancement / retraction movement of the operation wire with which the respective grooves and the projections abut is not secured, and the stop strength when the operation wire is moved is lowered.
具体的には、湾曲部を湾曲動作させる操作ワイヤが巻回される回転ドラムは、滑らかに回動するために厚さ方向に所定以上のクリアランスが設けられることが必要である。そのクリアランス内において、回転ドラムは、厚さ方向に遊動でき、第1のストッパ機構の第1停止部材と第1衝当部材の夫々の溝と突部及び第2のストッパ機構の第2停止部材の周溝と第2衝当部材の当接量が変動する。これら当接量が少ない場合には、第1及び第2のストッパ機構により操作ワイヤの進退移動を停止する強度が低下する恐れがある。これらを防ぐ手段として、夫々の溝の深さ及び突部の高さを十分確保し、いかなる状況でも所定の当接量を確保する必要がある。しかし、当接量を増す為に、第1のストッパ機構の第1停止部材と第1衝当部材を大きくして夫々の当接量を確保すると、上記クリアランスのために、夫々の溝底面と突部先端部がぶつかり、回転体の回動抵抗が大きくなり、回動に支障が生じる場合がある。また、第2のストッパ機構の第2停止部材の周溝を深くし、第2衝当部材の衝当面を大きくした場合は、形成する部分の厚さなどを増す必要があり、ストッパ機構が大きくなるという問題がある。 Specifically, a rotating drum around which an operation wire for bending the bending portion is wound needs to have a predetermined clearance or more in the thickness direction in order to smoothly rotate. Within the clearance, the rotary drum can move in the thickness direction, and the first stop member of the first stopper mechanism, the respective grooves and protrusions of the first abutting member, and the second stop member of the second stopper mechanism. The amount of contact between the circumferential groove and the second abutting member varies. When these contact amounts are small, there is a possibility that the strength for stopping the advancement / retraction movement of the operation wire by the first and second stopper mechanisms may be reduced. As a means for preventing these, it is necessary to ensure a sufficient depth of each groove and a height of the protrusion, and to ensure a predetermined amount of contact in any situation. However, if the first stop member and the first abutting member of the first stopper mechanism are enlarged to secure the respective contact amounts in order to increase the contact amount, There is a case where the tip of the protrusion collides, and the rotational resistance of the rotating body increases, which hinders the rotation. Further, when the peripheral groove of the second stop member of the second stopper mechanism is deepened and the abutting surface of the second abutting member is enlarged, it is necessary to increase the thickness of the portion to be formed, etc. There is a problem of becoming.
つまり、実公平6−41532号公報に示される第1及び第2のストッパ機構を有する内視鏡は、第1のストッパ機構の第1停止部材と第1衝当部材の夫々の溝と突部及び第2のストッパ機構の第2停止部材の周溝と第2衝当部材の夫々の溝と突部との当接量において、回転体の遊動位置によって溝と突部の当接量が異なる為、状況に応じてストッパ強度にばらつきがあるという問題がある。また、この内視鏡は、第1及び第2のストッパ機構を有するため、使用される部材数も多くなるという問題もある。 That is, the endoscope having the first and second stopper mechanisms disclosed in Japanese Utility Model Publication No. 6-41532 is provided with a groove and a protrusion of each of the first stop member and the first abutting member of the first stopper mechanism. In the contact amount between the circumferential groove of the second stop member of the second stopper mechanism and the respective groove and protrusion of the second abutting member, the contact amount of the groove and the protrusion varies depending on the floating position of the rotating body. Therefore, there is a problem that the stopper strength varies depending on the situation. Moreover, since this endoscope has the first and second stopper mechanisms, there is also a problem that the number of members used increases.
さらに、特許第3092980号公報に開示される内視鏡は、内部の制御装置にジョイスティックのフルスケールと湾曲部の湾曲角度の情報が規定される。 Furthermore, in the endoscope disclosed in Japanese Patent No. 3092980, information on the joystick full scale and the bending angle of the bending portion is defined in the internal control device.
通常、この情報を基に、内視鏡の湾曲部は、電動湾曲回路部に記憶された回動範囲においてプーリユニットは回動し、所定の湾曲角度まで湾曲することができる。しかし、違った情報が制御装置に規定された場合、内視鏡の湾曲部は、所望の湾曲範囲を超える動作をすることが考えられる。内視鏡装置の湾曲装置は、内視鏡の湾曲部が所望の湾曲範囲を超える動作を防止するような、安定性を高めた工夫がされるとなお良い。 Normally, based on this information, the bending unit of the endoscope can be bent to a predetermined bending angle by rotating the pulley unit within the rotation range stored in the electric bending circuit unit. However, when different information is defined in the control device, the bending portion of the endoscope may be operated beyond the desired bending range. It is further preferable that the bending device of the endoscope apparatus is devised with improved stability so as to prevent the bending portion of the endoscope from exceeding the desired bending range.
本発明は、上記問題に鑑みてなされたものであり、内視鏡の湾曲部に加えられる所定以上の負荷を与えず、ストッパ機構を小型化しても所定のストッパ強度が保たれ、多様な寸法設定に影響されること無く、安定性に富んだ簡単な構成のストッパ部材を有する内視鏡装置を提示することを目的とする。 The present invention has been made in view of the above problems, and does not give a load exceeding a predetermined value applied to the bending portion of the endoscope, and the predetermined stopper strength is maintained even if the stopper mechanism is miniaturized, and various dimensions are provided. It is an object of the present invention to provide an endoscope apparatus having a stopper member with a simple configuration that is rich in stability without being affected by settings.
本発明に係る第1の内視鏡装置は、可撓性を有し、細長な挿入部を備えた内視鏡と、該内視鏡の先端部分に設けられる湾曲操作される湾曲部と、該湾曲部から夫々延出し、前記湾曲部を少なくとも2つの方向に湾曲操作する一対の操作ワイヤと、該一対の操作ワイヤが巻回され、2枚のフランジ部が対向配置されているプーリユニットと、前記プーリユニットを回動自在に支軸する軸部材と、が設けられている内視鏡装置であって、前記プーリユニットの回転軸に略直交する平面内において、前記プーリユニットの前記2枚のフランジ部の外周面から夫々突起する2つの第1の突部と、前記2枚のフランジ部の外周面から離間した位置で、且つ前記プーリユニットと共に回動する前記第1の突部が当接する位置に設けられ、前記第1の突部が当接して前記プーリユニットの最大回動量を規制して、前記湾曲部の最大湾曲角度を規定する第2の突部と、前記プーリユニットを軸支する前記軸部材、および前記第2の突部が設けられるベース体と、を備え、前記2枚のフランジ部の少なくとも1つの前記第1の突部を前記回転軸から外周側に向けた突起する方向を変更自在とし、前記第1の突部が前記第2の突部に当接することで規制される前記プーリユニットの時計回りと反時計回り方向の回動範囲を変更することで、前記湾曲部が略直線状態となる前記一対の操作ワイヤが初期状態とされている基準位置から前記プーリユニットの時計回りの最大回動量の範囲と反時計回りの最大回動量の範囲が夫々異なるよう変更され、前記湾曲部の相対的に湾曲する方向の最大湾曲角度が異なるように設定自在とした。
また、本発明に係る第2の内視鏡装置は、可撓性を有し、細長な挿入部を備えた内視鏡と、該内視鏡の先端部分に設けられる湾曲操作される湾曲部と、該湾曲部から夫々延出し、前記湾曲部を少なくとも2つの方向に湾曲操作する一対の操作ワイヤと、該一対の操作ワイヤが巻回され、2枚のフランジ部が対向配置されているプーリユニットと、前記プーリユニットを回動自在に支軸する軸部材と、が設けられている内視鏡装置であって、前記プーリユニットの回転軸に略直交する平面内において、前記プーリユニットの前記2枚のフランジ部の夫々の外周面から同じ方向に夫々突起する2つの第1の突部と、前記2枚のフランジ部の外周面から離間した位置で、且つ前記プーリユニットと共に回動する前記2つの第1の突部が当接する位置に設けられ、前記湾曲部が略直線状態となる前記一対の操作ワイヤが初期状態とされている基準位置から前記2つの第1の突部が当接して前記プーリユニットの最大回動量を規制して、前記湾曲部の最大湾曲角度を規定する第2の突部と、前記プーリユニットを軸支する前記軸部材、および前記第2の突部が設けられるベース体と、を有している。
A first endoscope apparatus according to the present invention has a flexible endoscope having an elongated insertion portion, a bending portion that is provided at a distal end portion of the endoscope and is operated for bending, A pair of operation wires that respectively extend from the bending portion and operate to bend the bending portion in at least two directions; a pulley unit in which the pair of operation wires are wound and two flange portions are opposed to each other ; the a shaft member of the pulley unit to the support shaft rotatably, an endoscopic device is provided, in a plane substantially perpendicular to the axis of rotation of said pulley unit, said two of said pulley unit The two first protrusions projecting from the outer peripheral surface of the flange portion , and the first protrusion rotating with the pulley unit at a position spaced from the outer peripheral surfaces of the two flange portions. Provided in a contact position, and the first protrusion is Contact by regulating the maximum rotation amount of the pulley unit, and a second projection defining the maximum bending angle of the bending portion, wherein the shaft member for pivotally supporting said pulley unit, and the second protrusion A base body provided, wherein a direction in which at least one of the first protrusions of the two flange portions protrudes from the rotating shaft toward the outer peripheral side is changeable, and the first protrusion is By changing the clockwise and counterclockwise rotation range of the pulley unit that is regulated by contacting the second protrusion, the pair of operation wires in which the bending portion is in a substantially linear state The range of the maximum clockwise rotation amount of the pulley unit and the range of the maximum counterclockwise rotation amount of the pulley unit from the reference position in the initial state are changed to be different from each other. Different bending angles Sea urchin set was freely.
In addition, a second endoscope apparatus according to the present invention includes an endoscope having flexibility and an elongated insertion portion, and a bending portion that is provided at a distal end portion of the endoscope and is operated for bending. A pair of operation wires extending from the bending portion and bending the bending portion in at least two directions, and a pulley in which the pair of operation wires are wound and the two flange portions are opposed to each other An endoscope apparatus provided with a unit and a shaft member that pivotally supports the pulley unit, wherein the pulley unit has a plane substantially perpendicular to the rotation axis of the pulley unit. The two first protrusions projecting in the same direction from the respective outer peripheral surfaces of the two flange portions, and the position rotating away from the outer peripheral surfaces of the two flange portions and rotating together with the pulley unit Position where the two first protrusions abut The two first protrusions are in contact with each other from a reference position where the pair of operation wires in which the bending portion is in a substantially linear state is in an initial state, and the maximum rotation amount of the pulley unit is regulated. And a second protrusion that defines a maximum bending angle of the bending portion, the shaft member that pivotally supports the pulley unit, and a base body on which the second protrusion is provided.
本発明は、内視鏡の湾曲部に加えられる所定以上の負荷を与えず、ストッパ機構を小型化しても所定のストッパ強度が保たれ、多様な寸法設定に影響されること無く、安定性に富んだ簡単な構成のストッパ部材を有する内視鏡装置を実現することができる。特に、本発明の内視鏡装置は、湾曲部が必要以上の湾曲がされないため、この湾曲部の内部の部材、外皮などの損傷も防止できる。 This onset Ming not give endoscope load of a predetermined or more applied to the curved portion of, even when the size of the stopper mechanism prescribed stopper strength is maintained, as it not to be affected by a variety of sizing, stability It is possible to realize an endoscope apparatus having a stopper member with a simple configuration rich in a large number of objects. In particular, in the endoscope apparatus of the present invention, since the bending portion is not bent more than necessary, damage to members inside the bending portion, the outer skin, and the like can be prevented.
(第1の実施の形態)
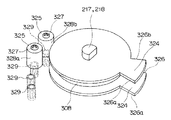
図1は、本発明の第1の実施の形態に係る内視鏡装置の斜視図である。
図1に示すように、内視鏡装置1は、例えば工業用の内視鏡(以下、内視鏡と称す)2と、収納ケース8とにより、主要部が構成されている。収納ケース8は、箱体81と、この箱体81の上部に開閉自在に接続された蓋体82とにより構成され、未使用の際には内視鏡2等が収納される。
(First embodiment)
FIG. 1 is a perspective view of an endoscope apparatus according to the first embodiment of the present invention.
As shown in FIG. 1, an endoscope apparatus 1 includes, for example, an industrial endoscope (hereinafter referred to as an endoscope) 2 and a storage case 8, and main parts are configured. The storage case 8 includes a box body 81 and a
収納ケース8の箱体81は、内部に収納した内視鏡2に外部から加わる衝撃力を吸収する緩衝材等を備えている。また、箱体81の内部には、内視鏡2の収納の際には、内視鏡2の後述する挿入部21を外周面部31に巻き取る収納部であるドラム部3、光源部32、カメラコントロールユニット(以下、CCUと称す)33、電動湾曲駆動部34、電動湾曲回路部35等が収納されたフレーム部4が配設されている。
The box 81 of the storage case 8 includes a cushioning material that absorbs an impact force applied from the outside to the
また、フレーム部4は、ドラム部3を回動自在に支持している。さらに、ドラム部3は、後述する側面板203、204及び外周面部31(いずれも図6参照)を有する管状部材201(図5参照)により構成されている。
Moreover, the frame part 4 is supporting the
箱体81の上部には、各種スイッチ類、コネクタ類及び給排気用ダクトが配設されたフロントパネル5が設けられている。具体的には、フロントパネル5の上面からは、フレーム部4の内部に収納された各種部材及び内視鏡2に電源を供給するためのACケーブル51が延出されている。
A front panel 5 in which various switches, connectors, and air supply / exhaust ducts are provided is provided on the top of the box 81. Specifically, from the upper surface of the front panel 5, various members housed in the frame portion 4 and an
また、フロントパネル5の上面には、内視鏡2によって撮像された被検部位の画像を表示するモニタ7を回動自在に支持する伸縮式のポール71が設けられている。さらにフロントパネル5の上面には、リモートコントローラ(以下、リモコンと称す)6のケーブル61が着脱自在に接続されている。
In addition, on the upper surface of the front panel 5, an
リモコン6には、ジョイスティック62が設けられており、ジョイスティック62は、内視鏡2の後述する挿入部21の湾曲部23を湾曲操作する際の湾曲入力制御部となる。また、リモコン6には、フレーム部4の内部に収納された各種機器及び内視鏡2用の電源オン釦63が設けられている。
The remote control 6 is provided with a
さらに、フロントパネル5の上面には、内視鏡2の挿入部21を箱体81に対して出し入れするための開口が形成された座屈防止用のゴム部材52が配設されている。座屈防止用のゴム部材52は、内視鏡2の挿入部21が箱体81から取り出された際、内視鏡2の挿入部21がフロントパネル5の出口付近において座屈するのを防止する。
Further, on the upper surface of the front panel 5, a buckling
内視鏡2は、柔軟性を有する細長の挿入部21を備えており、内視鏡2を使用する際は、挿入部21は、フロントパネル5から座屈防止用のゴム部材52を介して延出される。挿入部21には、先端側から順に硬質の先端部本体22、湾曲部23及び細長の柔軟性を有する可撓管部24が連設されている。
The
湾曲部23は、多方向に湾曲自在となるよう構成されており、湾曲部23は、リモコン6の操作により湾曲操作されることにより、先端部本体22内に配設された、後述する観察光学系の対物光学系116(図3参照)の観察方向を所望の方向に変更させることができる。
The bending
また、内視鏡2の挿入部21の先端部本体22の先端には、視野方向及び視野角等の光学特性を変換する各種光学アダプタ25が着脱自在に接続されている。
Various
次に、内視鏡2及びこの内視鏡2が巻き付けられるドラム部3の構成について図2〜図4を用いて説明する。図2は、図1のドラム部3の内部の構成を示した正面図、図3は、図1の内視鏡2の構成を示した横断面図、図4は、図3のIV−IV線に沿う縦断面図である。
Next, the configuration of the
ドラム部3の側面板203とする円板状部材、側面板204とする円板状部材、及び外周面部31(いずれも図6参照)によって形成された内部の空間には、図2に示すように、光源部32、CCU33、及び電動湾曲駆動部34、電動湾曲回路部35等の機器が収納されている。
As shown in FIG. 2, an internal space formed by the disk-shaped member serving as the
光源部32は、ランプ部221と点灯装置222とにより、主要部が構成されている。光源部32は、後述するライトガイド受け部37に連結されることにより、内視鏡2の挿入部21に挿通されたライトカイド111の基端面に照明光を照射する。
The
CCU33は、内視鏡2の挿入部21の先端部本体22に配設された、後述する電荷結合素子型固体撮像素子(以下、CCDと称す)117(図3参照)に対する信号処理を行う。
The
電動湾曲駆動部34は、内視鏡2の挿入部21の湾曲部23を湾曲させる際に、駆動力を発生する装置を有し、湾曲部23を湾曲動作させるものである。なお、電動湾曲駆動部34は、後に図5以降において詳細に説明する。
The electric
電動湾曲回路部35は、リモコン6のジョイスティック62から入力された操作指示信号に基づき、電動湾曲駆動部34を駆動制御して、内視鏡2の湾曲部23の湾曲状態を制御する回路等を有する。
The electric
先端部本体22に着脱自在である光学アダプタ25は、図3に示すように、アダプタ本体101に、アダプタ側光学系102と照明光学系103とが配設されて構成されている。
As shown in FIG. 3, the
また、挿入部21内には、光源部32から供給された照明光を被検部位に伝送するライトガイド111が挿通されている。ライトガイト111の基端は、図2に示すように、口金となるライトガイドコネクタ112に固定されている。ライトガイドコネクタ112は、ライトガイトコネクタ受け部37に組み付けられており、ライトガイトコネクタ受け部37は、光源部32に連結されている。
Further, a
図3に戻って、先端部本体22には、先端に照明窓113が配設されている。照明窓113には、照明用レンズ114が固定されている。照明用レンズ114の基端側には、ライトガイト111の先端が位置されている。
Returning to FIG. 3, the distal end
よって、光源部32から供給された照明光は、ライトガイト111内を伝送し、ライトガイド111の先端面から照明用レンズ114を透過して、光学アダプタ25の照明光学系103をさらに透過して被検部位に照射される。
Therefore, the illumination light supplied from the
また、先端部本体22の先端には、さらに、照明窓113に隣接して撮像窓である観察窓115が配設されており、この観察窓115の基端側には、対物光学系116が配設されている。対物光学系116の結像位置には、CCD117が配設されている。
Further, an
CCD117の外周には、複数の信号線118の夫々の一端が接続されており、複数の信号線118の夫々の他端は、図2に示すように、CCU33に接続されている。CCU33は、信号線118を介して送信されたCCD117によって撮像され光電変換された信号から標準的な映像信号を生成してモニタ7に出力する(図1参照)。このことにより、モニタ7の画面上には、被検部位の像である内視鏡撮像画像が表示される。
One end of each of the plurality of
内視鏡2の湾曲部23は、環状に形成した複数の湾曲駒121を光軸方向に沿って回動自在に連接したものに、網管122及びチューブ体123が被覆されることにより構成されている。湾曲駒121の先端部は、先端部本体22の基端側の後端部に固定されている。
The bending
内視鏡2の湾曲部23の内部には、ライトガイド111及び信号線118が、図4に示すように、湾曲上下方向に対して縦列又は若干左右方向にずれる位置に配設されている。なお、チューブ体123の外周には、挿入部21の基端部までの略全域に沿って、外皮124が被覆されている。
Inside the bending
湾曲駒121の円環部の円周を略4等分する薄肉部内の上下、左右に対応する位置には、図4に示すように、孔部125が、例えば4つ形成されている。4つの孔部125の内部には、アングルワイヤである湾曲操作ワイヤ131,132,133,134の挿入部側ワイヤ135,136,137,138が摺動可能に挿通されている。
As shown in FIG. 4, for example, four
挿入部側ワイヤ135〜138の先端部は、湾曲駒121の先端部の上下、左右方向に対応する位置にそれそれ固定されている。このため、各方向に対応する挿入部側ワイヤ135〜138が夫々電動湾曲駆動部34により牽引弛緩されることによって、内視鏡2の湾曲部23が上下左右の所望の方向に湾曲操作される。
The distal end portions of the insertion
よって、先端部本体22内に配設された、後述する観察光学系の対物光学系116(図3参照)の観察方向を上下左右の所望の方向に変更させることができるようになっている。また、挿入部側ワイヤ135〜138は、夫々、挿入部側ワイヤ135,136を一対とし、挿入部側ワイヤ137,138を一対として、主にステンレス等の2本の金属製の案内管139により、内視鏡2の挿入部21の基端側まで案内される。
Therefore, the observation direction of the objective optical system 116 (see FIG. 3) of the observation optical system, which will be described later, disposed in the distal end
挿入部側ワイヤ135〜138は、電動湾曲駆動部34に接続される。この接続を図5を用いて詳細に説明する。図5は、図2のドラム部3の電動湾曲駆動部34を詳細に示した部分正面図である。
同図に示すように、一対の挿入部側ワイヤ135,136は、電動湾曲駆動部34上において、一対の電動湾曲駆動部側ワイヤ141,142に連結されている。また、図5には、図示されないが、一対の挿入部側ワイヤ137,138は、電動湾曲駆動部34上において、一対の電動湾曲駆動部側ワイヤ143,144に連結されている。
The insertion
As shown in the figure, the pair of insertion
なお、電動湾曲駆動部34には、内視鏡2の湾曲部23を、例えば上下方向、左右方向に湾曲させる、全く同じ機構である後述する一対のプーリユニット153が配設されている。
The electric
挿入部側ワイヤ135〜138と、電動湾曲駆動部側ワイヤ141〜144とは、湾曲操作ワイヤ131〜134を構成している。
なお、以下一対の挿入部側ワイヤ135,136を内視鏡2の湾曲部23の上下方向の湾曲用ワイヤとし、一対の挿入部側ワイヤ137,138を内視鏡2の湾曲部23の左右方向の湾曲用ワイヤとする。
The insertion
Hereinafter, the pair of insertion
案内管139の基端部は、コネクタ部9まで導出し、その基端部は、ドラム部3の、ここでは、板金からなる係合部167(以下、係合板金167という。)によって係合支持されている。さらに、一対の挿入部側ワイヤ135,136と、一対の電動湾曲駆動部側ワイヤ141,142とは、係合板金167とプーリユニット153,154との中途位置において接続されており、その接続は雄ねじを有する雄ねじ口金168と、雌ねじを有する雌ねじ口金169とによってなされている。なお、挿入部側ワイヤ137,138と、電動湾曲駆動部側ワイヤ143,144との接続も同様である。
The proximal end portion of the
雄ねじ口金168、雌ねじ口金169には、ネジロック等の化学的な緩み防止手段が設けられている。さらに、上記接続箇所には、雄ねじ口金168、雌ねじ口金169を被覆する熱収縮チューブを設けるようにしてもよい。
The
なお、電動湾曲駆動部側ワイヤ141〜144は、挿入部側ワイヤ135〜138に比べ径の太いワイヤを使用している。つまり、電動湾曲駆動部側ワイヤ141〜144には、繰り返し曲げ耐性の高い、太くしなやかなワイヤを用いている。
In addition, the electric curve drive part side wires 141-144 are using a wire with a diameter larger than the insertion part side wires 135-138. That is, the electric bending drive
具体的に、挿入部側ワイヤ135〜138には、径寸法0.2〜0.5mm程度までの1×3、1×7本撚りのワイヤを使用し、電動湾曲駆動部側ワイヤ141〜144には、挿入部側ワイヤ135〜138よりも太径の、7×7、3×7、7×19本撚り等のワイヤを使用している。
Specifically, for the insertion
さらに、電動湾曲駆動部側ワイヤ141〜144の基端部側には、電動湾曲駆動部側ワイヤ141〜144よりも径の大きい口金部である係止口金310が夫々形成されている。
Furthermore, the locking
電動湾曲駆動部34には、一対の挿入部側ワイヤ135,136に夫々接続される一対の電動湾曲駆動部側ワイヤ141,142が巻き付けられるプーリユニット153が配設されており、さらに、一対の挿入部側ワイヤ137,138に接続される一対の電動湾曲駆動部側ワイヤ141,142が巻き付けられる、プーリユニット153と同一の構成を有するプーリユニット154が配設されている。
The electric
よって、以下の説明では、内視鏡2の湾曲部23の上下方向の湾曲を行う、一対の挿入部側ワイヤ135,136に接続される一対の電動湾曲駆動部側ワイヤ141,142が巻き付けられるプーリ本体を有するプーリユニット153を中心に説明を行う。
Therefore, in the following description, the pair of electric bending drive
プーリユニット153,154が回動することにより、夫々湾曲操作ワイヤ131〜134の牽引弛緩が行われる。プーリユニット153,154は、夫々、電動湾曲駆動部34に配設されたモータユニット211,212の出力軸217,218に回動自在に軸支されている。
As the
ここで、図5に示すように、電動湾曲駆動部34が収納されたドラム部3は、外周面部31を有する管状部材201と、1組の円板部材202とにより構成されている。管状部材201には、内視鏡2を、箱体81(図1参照)に収納する際、内視鏡2の挿入部21が管状部材201の外周面部31に巻き付けられる。1組の円板部材202は、管状部材201の図中表面及び裏面の開口を閉鎖している。
Here, as shown in FIG. 5, the
なお、円板部材202は、図2に示すドラム部3の表面の開口を塞ぐ円板部材202を、側面板203とし、ドラム部3の裏面の開口を塞ぐ円板部材202を側面板204とする。
The
また、電動湾曲駆動部34は、電動湾曲回路部35にケーブル165,230により接続されている。次に、電動湾曲駆動部34を図6を用いて詳細に説明する。図6は、図5のVI−VI線に沿う縦断面図である。
図6に示すように、側面板203,側面板204,管状部材201によって形成された、ドラム部3の内部には、側面板203と側面板204とを連結する取付板323が配設されており、また取付板323と管状部材201とを連結する一対のベース体322が配設されている。
In addition, the electric
As shown in FIG. 6, a mounting
一対のベース体322には、夫々モータユニット211,212が固定されており、モータユニット211の出力軸217には、プーリユニット153が回動自在に軸支されている。また、モータユニット211には、出力軸217の回転角を検出する可変抵抗器であるポテンショメータ151が接続されている。
モータユニット211は、駆動力を発生させる駆動源となるモータ部320と、このモータ部320の駆動力を出力軸217まで伝達する平歯車や遊星歯車等の歯車列によって構成された減速ギヤ部321とにより、主要部が構成されている。また、モータユニット211は、プラス端子とマイナス端子を有し、両極端子から導出したケーブル230が電動湾曲回路部35に接続されている。
The
ポテンショメータ151は、自身の抵抗値の上限、下限を示す第1,第2の端子及び回転位置に相応した抵抗値を示す第3の端子を夫々有している。この3つの端子は、ケーブル165を介して、電動湾曲回路部35に接続されている。
The
なお、モータユニット212側の構成及び接続態様は、上述したモータユニット211側の構成及び接続態様と構成が同じであるため、その説明は省略する。
The configuration and connection mode on the
ドラム部3の電動湾曲回路部35は、ポテンショメータ151が検出した出力軸217の現時点の回転位置情報と、リモコン6のジョイスティック62(いずれも図1参照)から伝送される操作指示信号とに基づいて、図6に示す電動湾曲駆動部34のモータユニット211,212を駆動制御する。このことにより、後述する機構により、内視鏡2の湾曲部23は、所望の方向へ湾曲される。
The electric
なお、内視鏡2の湾曲部23の最大湾曲角度となるポテンショメータ151,152の回転位置情報は、電動湾曲回路部35上にデフォルト値として記憶されている。つまり、その値までは、後述するプーリユニット153,154が回動自在となる。但し、デフォルト値といってもその数値を変更できない訳ではなく、内視鏡装置1に、図示しないパーソナルコンピュータを接続することにより、任意の値に修正できる。さらに付け加えると、電動湾曲回路部35に間違った値を任意の値として入力されたとしても、プーリユニット153,154の回動量は、後述するベース体側ストッパ322及びフランジ側ストッパ324が当接し、規制される。その結果、内視鏡2の湾曲部23は、問題のない湾曲範囲内だけ、湾曲動作を行える。
Note that the rotational position information of the
なお、電動湾曲駆動部34、電動湾曲回路部35は、上述したように、ドラム部3内に収納され、フレーム部4に対し回動自在となっている。
また、図7は、ドラム部3及び、その内部に収納される電動湾曲駆動部34を上方側、つまり、フロントパネル5側から見た部分断面図である。さらに、図8は、図7に示される電動湾曲駆動部34を拡大した図である。これら図7及び図8は、上述の電動湾曲駆動部34の構成についての説明補足図とされたい。
The electric
FIG. 7 is a partial cross-sectional view of the
次に、プーリユニット153,154について図9〜図12を用いて詳細に説明する。図9は、図5のプーリユニット153,154のVII−VII線に沿う横断面図、図10は、図9のVIII−O−VIII線に沿う断面図である。また、図11は、ドラム部3の内部に収納される電動湾曲駆動部34をフロントパネル5側から見た部分断面図、図12は、図9のIX−IX線に沿う部分横断面図である。ここで、図12は、以下に説明するプーリユニット153,154の説明補足図とされたい。
Next, the
図9に示すように、プーリユニット153は、出力軸217に回動自在に軸支された出力軸217の外周に当接する位置に外向鍔部301F(図10参照)を有し、略円板状部を有するプーリ本体301と、このプーリ本体301の外向鍔部301F以外の部位を挟接する中空の2枚の略円板状のフランジ部302と、これら2枚のフランジ部302の夫々に配設された係止部である係止部材303a、303b(以下、単に係止部材303ということもある。)により主要部が構成されている。
As shown in FIG. 9, the
フランジ部302は、第1の突部として、その回転軸に略直交する平面内であって、外周方向に向けて突起するフランジ側ストッパ324を有している。このフランジ側ストッパ324は、その略円板状の突起する方向に略直交する方向の両側面に後述する当接部326a、326bを有している。
The
ベース体322(図11参照)には、プーリユニット153のフランジ部302の外周から所定の離間した位置であって、電動湾曲駆動部側ワイヤ141と電動湾曲駆動部側ワイヤ142の間に2つのベース体側ストッパ325が設けられている。この2つのベース体側ストッパ325は、ベース体322の面に対して、すなわち、フランジ部302の平面に対して垂直方向に突起するようにビス327(図12参照)などの固定部材によって固定される。さらに、2つのベース体側ストッパ325は、夫々に筒状形状を有する周面部328a、328bを有し、これら周面部328a、328bの外周面がフランジ側ストッパ324の当接部326a、326bに当接できる位置に位置決めされている。一方の周面部328aは、フランジ側ストッパ324の当接部326aに、もう一方の周面部328bは、フランジ側ストッパ324の当接部326bに夫々対応して当接される。
The base body 322 (see FIG. 11) is located at a predetermined distance from the outer periphery of the
また、図11に示すように、プーリユニット153は、滑らかな回転動作ができるように、ベース体322と外向鍔部301Fが対向する面、取付板323と外向鍔部301Fが対向する面との間に距離△hにおいてその厚さ方向に夫々離間するようにクリアランスを有している。このクリアランスの距離△hの範囲において、プーリユニット153は、その厚さ方向に移動できる。そのため、ベース体側ストッパ325の周面部328a、328bは、このプーリユニット153が厚さ方向に移動しても、その外周面が、フランジ側ストッパ324の当接部326a、326bと必ず当接できる筒長を有している。
Further, as shown in FIG. 11, the
係止部材303a,303bは、断面が台形の回転体形状を有する本体と、この本体の下面に形成された、円板状の脚部306a,306bとにより、構成されている。即ち、係止部材303a,303bは、はす歯形状を有している。
The locking
図10に示す係止部材303a,303bの本体の外周面は、夫々斜面部309a,309bを形成しており、また、係止部材303a,303bの下面の脚部306a、306b上に、溝状の係止溝307a,307bが夫々形成されている。
The outer peripheral surfaces of the main bodies of the
また、係止部材303a,303bの上記本体であって、斜面部309a,309bの一部には、プーリ本体153に一対の電動湾曲駆動部側ワイヤ141,142が巻き付けられた際、一対の電動湾曲駆動部側ワイヤ141,142の基端部側に形成された係止口金310a,310bが係止される係止面311a,311bが図9に示すように夫々形成されている。
In addition, when the pair of electric bending drive
さらに、図9と図10を参照し、フランジ部302に設けられる孔部305a、305bの位置を説明する。2枚のフランジ部302の一方には、孔部305aが形成されており、他方のフランジ部302には、図9に示すIX−IX線の線分に対して線対称となる位置に孔部305bが形成されている。
Further, the positions of the
係止部材303aの脚部306aは、一方のフランジ部302の孔部305aに回動自在に嵌入しており、係止部材303bの脚部306bは、他方のフランジ部302の孔部305bに回動自在に嵌入している。
The
プーリ本体301の外周面には、出力軸217の中心軸800に直交する軸900の図10中下側であって、一方のフランジ部302の孔部305aが形成された近傍に、溝部304aが外周面に沿って形成されている。溝部304aには、係止部材303aの上記本体の一部が回動自在に嵌入している。
On the outer peripheral surface of the pulley
また、プーリ本体301の外周面であって、出力軸217の中心軸800に直交する軸900の図10中上側であって、一方のフランジ部302の孔部305aが形成された近傍には、電動湾曲駆動部側ワイヤ142が巻き付けられる巻回面308aが形成されている。
Further, on the outer peripheral surface of the
さらに、プーリ本体301の外周面には、厚み方向の中点よりも裏面側、即ち出力軸217の中心軸800に直交する軸900の図10中上側であって、他方のフランジ部302の孔部305bが形成された近傍に、溝部304bが外周面に沿って形成されている。溝部304bには、係止部材303bの上記本体の一部が回動自在に嵌入している。
Further, on the outer peripheral surface of the pulley
また、プーリ本体301の外周面であって、溝部304bが形成されていない厚み方向の中点よりも表面側、即ち出力軸217の中心軸800に直交する軸900の図10中下側であって、一方のフランジ部302の孔部305bが形成された近傍には、電動湾曲駆動部側ワイヤ141が巻き付けられる巻回面308bが形成されている。
Further, the outer peripheral surface of the
このように構成されたプーリユニット153のプーリ本体301には、一対の電動湾曲駆動部側ワイヤ141,142が巻き付けられている。詳しくは、電動湾曲駆動部側ワイヤ141は、係止部材303aの係止溝307a、及び係止部材303bの斜面部309bに案内されてプーリ本体301の外周面の巻回面308bに巻き付けられる。
A pair of electric bending
また、電動湾曲駆動部側ワイヤ142は、係止部材303bの係止溝307b、及び係止部材303aの斜面部309aに案内されてプーリ本体301の外周面の巻回面308aに巻き付けられている。
なお、プーリユニット154は、プーリユニット153と同一の構成を有しているので、その説明は省略する。
Further, the electric bending drive
Since the
次に、このように構成された内視鏡装置1の使用方法について説明する。
まず、使用者は、収納ケース8の蓋体82を開け、ACケーブル51を電源に接続する。次いで、使用者は、リモコン6を取り出した後、内視鏡2の挿入部21の先端部本体22の近傍を把持して、ゆっくりと挿入部21を引き出す。
Next, a method for using the endoscope apparatus 1 configured as described above will be described.
First, the user opens the
使用者が挿入部21を引き出すことにより、挿入部21が外周面部31に巻き付けられているドラム部3が回転する。よって、ドラム部3は、収納ケース8から座屈防止用のゴム部材52を介して収納ケース8の外方に挿入部21を供給する。なお、この作業は、リモコン6を用いて電動によって行っても良い。
When the user pulls out the
さらに、使用者は、検査に必要な光学アダプタ25を選択してこの光学アダプタ25を先端部本体22に取り付け、リモコン6の電源オン釦63をオンにする。このことによって、内視鏡2は検査可能な状態となる。
Further, the user selects the
次に、検査の際の内視鏡2の湾曲部23の湾曲操作及びリモコン6の操作による電動湾曲駆動部34の駆動動作について説明する。
使用者によって、リモコン6のジョイスティック62が上下左右の所望する方向に操作されると、ジョイスティック62の傾き角度に相応した信号が、図5,図6に示す電動湾曲回路部35に伝送される。
Next, the bending operation of the bending
When the user operates the
電動湾曲回路部35は、ジョイスティック62の操作信号を受けて、電動湾曲駆動部34のモータユニット211,212のモータ部320(いずれも図6参照)の上記操作信号に相応する回転量を演算処理して算出する一方、この演算結果に対応する回転指示信号をモータユニット211,212に送信する。
The electric
モータユニット211,212は、電動湾曲回路部35から伝送された上記回転指示信号を受けて出力軸(図示せず)を回転する。モータユニット211,212のモータ部320の回転は、減速ギヤ部321を介して出力軸217,218に伝達され、出力軸217,218が回転する。出力軸217,218の回転に伴い、プーリユニット153,154が夫々回転する。
The
ここで、プーリユニット153,154の回転について説明する。図13は、回転前のプーリユニットの状態を示す横断面図、図14は、プーリユニット153,154が図13に示す位置から時計回りに一定量回転したことを示す横断面図、図15は、プーリユニット153,154が図14に示す位置から時計回りに一定量回動したことを示す横断面図、図16は、プーリユニット153,154が図15に示す位置から時計回りに一定量回転し、時計周りの回転の限界に達したことを示す横断面図である。
Here, the rotation of the
図13に示すプーリユニット153の回動前の状態において、電動湾曲駆動部側ワイヤ141,142は、所定の張力が掛けられている初期状態であり、このとき内視鏡2の湾曲部23は真直ぐな状態である。
In the state before the rotation of the
まず、プーリユニット153の回動により電動湾曲駆動部側ワイヤ141を巻き取る方向について説明する。図13に示す位置から、プーリユニット153の出力軸217が時計周りに回動すると、プーリユニット153のプーリ本体301が一体となって時計回りに回動される。
First, the direction in which the electric bending drive
つまり、プーリユニット153は、このプーリユニット153に配設された係止部材303aの係止溝307a(図10参照)に電動湾曲駆動部側ワイヤ141を挿通させ、係止面311a(図9参照)にて、電動湾曲駆動部側ワイヤ141の係止口金310aを係止した状態において、図13に示す位置から図14,図15に示す位置を経て図16に示す位置まで、時計周りに回動していく。このことにより、プーリユニット153は、電動湾曲駆動部側ワイヤ141をプーリ本体301の巻回面308bに巻き取る。
That is, the
よって、電動湾曲駆動部側ワイヤ141が牽引される為、雄ねじ口金168、雌ねじ口金169によって接続された挿入部側ワイヤ135が牽引される。このことにより、内視鏡2の湾曲部23は、挿入部側ワイヤ135によって牽引された方向、例えば上方向に湾曲される。
Accordingly, since the electric bending drive
その後、図16に示すように、雌ねじ口金169が、フランジ部302に当接する直前まで、電動湾曲駆動部側ワイヤ141の牽引によるプーリユニット153の時計周りの回動する。
After that, as shown in FIG. 16, the
一方、係止部材303bの係止溝307b(図10参照)に挿通され、巻回面308aに一部が巻き付けられている、巻き取られない電動湾曲駆動部側ワイヤ142は、プーリ本体301が、図13に示す位置から時計回りに回動することにより、電動湾曲駆動部側ワイヤ142の係止口金310bが、係止部材303bの係止面311bから、図14に示すように離間する。その結果、電動湾曲駆動部側ワイヤ142に接続された挿入部側ワイヤ136は弛緩される。
On the other hand, the non-winding electric bending drive
その後、電動湾曲駆動部側ワイヤ142が、係止溝307bを摺動する。またその際、プーリ本体301は、図14,図15に示す位置を経て図16に示す位置において、
このとき、電動湾曲駆動部側ワイヤ142及びこれに接続された挿入部側ワイヤ136は、わずかに挿入部側に引き込まれるものの積極的に押し戻している訳ではないため、徐々に電動湾曲駆動部側ワイヤ142に、図15に示すように、余剰部142Tが発生することとなる。
Thereafter, the electric bending drive
At this time, the electric bending drive
そして、図15に示すように、徐々に係止口金310bが、係止部材303bから遠ざかり、電動湾曲駆動部側ワイヤ142の余剰部142Tは、挿入部21側とは反対の側であるプーリユニット153の基端側に移動する。
Then, as shown in FIG. 15, the locking
その後、図16に示すように、プーリユニット153が時計周りの回動の限界に達した際には、電動湾曲駆動部側ワイヤ142は直線状となり、電動湾曲駆動部側ワイヤ142の曲げ負荷は、ほぼ0(ゼロ)となる。
After that, as shown in FIG. 16, when the
なお、係止部材303は、フランジ部302に対して回動自在であるため、電動湾曲駆動部側ワイヤ141,142の軌道に応じて、図13乃至図16に示すように向きを回動できるため、プーリユニット153の回動による電動湾曲駆動部側ワイヤ141,142への負荷を軽減することができる。
Since the locking member 303 is rotatable with respect to the
このような構成によれば、プーリユニット153の回動による挿入部側ワイヤ135,136の牽引弛緩によって、挿入部側ワイヤ135,136に接続された電動湾曲駆動部側ワイヤ141,142にたるみが発生することがない。よって、挿入部側ワイヤ135,136及び電動湾曲駆動部側ワイヤ141,142によって構成される湾曲操作ワイヤ131,132の消耗を防止することができる。
According to such a configuration, the electric bending drive
なお、プーリユニット153を回動させるプーリ出力軸217の回動量は、上述したように、ポテンショメータ151により検知される。詳しくは、モータ部320(図6参照)は、常時、出力軸217の回動位置をポテンショメータ151においてモニタリングされた状態にて動作するようになっている。
The rotation amount of the
従って、電動湾曲回路部35は、演算処理して回動量の算出した算出値と、ポテンショメータ151によって検知した出力軸217の回動位置とが一致した段階において、モータ部320の動作が停止するようモータ部320を制御する。
Therefore, the electric
以上の操作によって、ジョイスティック62(図1参照)が操作された際、内視鏡2の湾曲部23は、所望の方向に湾曲されて、湾曲部23は、先端部本体22内に配設された、後述する観察光学系の対物光学系116(図3参照)の観察方向を所望の方向に変更させることができる。このことを用いて、検査対象物の観察を行うことができる。
When the joystick 62 (see FIG. 1) is operated by the above operation, the bending
従って、作業者は、プーリユニット153が通常の回動動作の操作を行い、検査対象物の検査を行った後、挿入部21を配管などから引き出し、ドラム部3に挿入部21を巻き付け、その後、蓋体82を閉めることにより、内視鏡装置1の片付けが完了となる。
Therefore, the operator operates the
上述したようにプーリユニット153は、操作指示された通りに回動する。しかしながら、電動湾曲回路部35上のデフォルト値が任意に決められるため、プーリユニット153は、その回動量が自在に設定される。つまり、電動湾曲回路部35には、プーリユニット153の所定の回動量を超える設定が誤ってされ、内視鏡2の湾曲部23が最大湾曲角度を超える湾曲動作がされる場合もある。
As described above, the
そこで、プーリユニット153は、内視鏡2の湾曲部23の湾曲角度が過大な角度にならない微小角度に設定湾曲角度を超える程度に回動し、図17のように、フランジ側ストッパ324の当接部326aとベース体側ストッパ325の周面部328aが当接して時計回り方向の回動が阻止される。
Accordingly, the
また、反時計回りの場合においては、プーリユニット153は、フランジ側ストッパ324の当接部326bとベース体側ストッパ325の周面部328bが当接して反時計回り方向の回動が阻止される。
Further, in the case of counterclockwise rotation, the
以上のプーリユニット153の時計回り方向の動作は、プーリユニット153が反時計回り方向の回動によって電動湾曲駆動部側ワイヤ142を牽引し、電動湾曲駆動部側ワイヤ141を弛緩する場合においても同様であるため説明は省略する。さらに、プーリユニット154の回動の動作については、同一の構成を有しているので、その動作説明は省略する。
The above-described clockwise operation of the
以上の結果、本実施の形態に係る内視鏡装置1は、フランジ側ストッパ324の当接部326a又は326bの少なくとも一部の面がプーリユニット153、154の両方向への最大回動量において、必ずベース体側ストッパ325の周面部328a又は周面部328bに当接する。そのため、内視鏡2の湾曲部23は、フランジ側ストッパ324とベース体側ストッパ325の安定した保持力でプーリユニット153、154の回動を阻止できるため、いかなる状況であっても所望の方向に操作される性能を確保される。
As a result of the above, in the endoscope apparatus 1 according to the present embodiment, at least a part of the
また、内視鏡2の湾曲部23は、必要以上の湾曲がされないため、湾曲部23の内部の部材及び外皮などの損傷が防止される。
In addition, since the bending
さらにまた、湾曲操作ワイヤ131,132,133,134、挿入部側ワイヤ135,136,137,138、係止部材303a,303b、係止口金310a,310b、雄ねじ口金168及び雌ねじ口金169などは、プーリユニット153,154の回動によって必要以上の張力が与えられないため、夫々の損傷が防止される。
Furthermore, the bending
特に、ドラム式の内視鏡装置1においては、電動湾曲駆動部34の位置がドラム部3の回動位置に応じて様々な位置に変わる。つまり、プーリユニット153,154は、電動湾曲駆動部34の位置に係わらず、フランジ側ストッパ324とベース体側ストッパ325によって略均一の回動停止性能が保たれる。
In particular, in the drum type endoscope apparatus 1, the position of the electric
なお、ベース体322(図11参照)は、図18に示すように、ビス327と螺合されるねじ穴部329を複数有し、ベース体側ストッパ325はプーリユニット153のフランジ部302の外周から所定の離間した位置に選択的にねじ穴部329によって固定され、配置されるようにしても良い。この場合、ベース体側ストッパ325は、内視鏡装置1の機種毎に配置位置が変えられるため、プーリユニット153、154の回動に適した位置に配置することができる。また、同じ内視鏡装置1の機種においても、ベース体側ストッパ325は、湾曲操作ワイヤ131,132,133,134の張力量調整のために、プーリユニット153、154の回動範囲の変更によって、その配置位置を変えられる。
As shown in FIG. 18, the base body 322 (see FIG. 11) has a plurality of
さらに、ベース体側ストッパ325は、フランジ側ストッパ324に対し2つ設けられているが、フランジ側ストッパ324に対し1つがベース体322に設けられても良い。
Further, two base
さらにまた、図19に示すように、プーリユニット153,154の2つのフランジ側ストッパ324は、その突起する方向が変えるようにしても良い。この場合、夫々のフランジ側ストッパ324の当接部326は、ベース体側ストッパ325に当接する回動量である距離が変えられ、内視鏡装置1の機種によっては、プーリユニット153,154の時計回りの回動範囲と反時計回りの回動範囲が夫々異なるものについて使用することができる。つまり、内視鏡2の湾曲部23は、直棒状態の軸に対して、一方向の湾曲角度よりも他方向の湾曲角度を夫々異なる角度に設定することができる。
Furthermore, as shown in FIG. 19, the two
また、図20に示すように、フランジ部302には、別部材の突部片343が設けられ、その表面にビス344などの固定手段によってフランジ部302の円板面に固定されるものでも良い。フランジ部302と突部片343の固定手段は、接着、溶接などによって固定されるものでも良い。この突部片343の材質は、フランジ302と同じ材質でもよく、例えば、真鍮、ステンレスのような金属又はABS樹脂、ポリカーボネート、ポリフェニレンサルファイドなどのような樹脂でも良い。なお、フランジ部302の円板面は、図示しない雌ねじ部を複数有し、任意の雌ねじ部の位置において、ビス344などによって突部片343が固定されても良い。
Further, as shown in FIG. 20, the
さらに、図21に示すように、巻回面308には、その外表面上に電動湾曲駆動部側ワイヤ141,142が巻回される位置としない部分に、凹部346を有し、その凹部346に突部片345が圧入されても良い。この場合においても、巻回面308と突部片345は、同じ質材でも異なった質材でも良く、上述のように突部片345は、金属でも樹脂でも良い。さらにまた、巻回面308は、突部片345を任意の位置で固定できるよう、複数の凹部346が設けられても良い。また、突部片345は、巻回面308の凹部346へ圧入によって固定されること限らず、接着、溶接、半田又はビスなどによる固定手段によって固定されても良い。
Furthermore, as shown in FIG. 21, the winding
また、図22に示すように、2枚のフランジ部302のどちらか一方が、その回転軸に略直交する平面内であって、外周方向に向けて突起するフランジ側ストッパ324を1つ有してもよい。
Further, as shown in FIG. 22, either one of the two
さらに、図23(a)に示すように、2枚のフランジ部302は、夫々の突起側の平面端部に垂直方向の面部分によって連結されていても良い。つまり、2枚のフランジ部302は、2つのフランジ側ストッパ324が垂直に連結される面部分によって一体となるコの字状に折り曲げた略円板形状をしている。このとき、図23(a)に示すようにベース体322(図11参照)には、プーリユニット153のフランジ部302の外周から所定の離間した位置であって、対向する電動湾曲駆動部側ワイヤ141と電動湾曲駆動部側ワイヤ142の間と逆の外側に位置決めされる2つのベース体側ストッパ325が設ける必要がある。
Furthermore, as shown in FIG. 23 (a), the two
従って、プーリユニット153,154は、当接部326a,326bがベース体側ストッパ325の周面部328a、328bに当接する面積が大きくなり、さらに、2枚のフランジ部302が上記面部分によって連結されていることから、回動停止力の機能が高くなる。また、プーリユニット153,154に巻回する電動湾曲駆動部側ワイヤ141,142は、フランジ部302から離脱されることが無くなるため、安定した内視鏡2の湾曲部23の湾曲操作を行うことができる。
Accordingly, the
また、図25は、プーリユニット153又は154が図24に示す位置から時計回りに一定量回動したことを示す横断面図である。図26は、図25に示す位置から時計回りに一定量回動し、回動の限界に達したことを示す横断面図である。
FIG. 25 is a cross-sectional view showing that the
これらの図24〜図26は、上述した図13〜図16のプーリユニット153と同じ動作をするため参考図とされたい。
These FIG. 24 to FIG. 26 should be used as reference views because they perform the same operation as the
また、図27に示す、2つのフランジ側ストッパ324が垂直に連結されるプーリユニット153においても、内視鏡2の湾曲部23の角度が過大とならないように、フランジ側ストッパ324の当接部326aとベース体側ストッパ325の周面部328aが当接して時計回り方向の回動が阻止される。
Also, in the
また、プーリユニット153,154は、プーリ本体301とフランジ部302を一体形成されるものでも良い。
The
さらに、図23(b)に示すように、ベース体側ストッパ325aは、ベース体322のねじ穴部329(図18参照)と螺合するねじ溝を有し、このねじ溝と反対側の端面部には、螺合量を調整するマイナスドライバーなどと係合するための回転溝を有するものでも良い。
Further, as shown in FIG. 23 (b), the base
(第2の実施の形態)
本実施の形態に係る内視鏡装置1は、第1の実施の形態の変形例であって、第1の実施の形態と同一の構成については、同符号を付し、その構成、動作及び効果を有する事項については、説明を省略する。
(Second Embodiment)
An endoscope apparatus 1 according to the present embodiment is a modification of the first embodiment, and the same components as those in the first embodiment are denoted by the same reference numerals, and the configuration, operation, and Description of matters having effects is omitted.
まず、本実施の形態に係るプーリユニット153について図26、図27及び図28を用いて説明する。
First, the
図28及び図29に示すように、プーリユニット153の2枚のフランジ部302は、ベース体322の表面と対向する外表面に、ストッパ円板340を有する。また、ストッパ円板340は、その回転軸に略直交する平面内であって、外周方向に向けて突起する第1の突部として当接部342を有する円板側ストッパ341を有している。
As shown in FIGS. 28 and 29, the two
図28に示すように、ベース体322には、第2の突部として円柱部336(図30参照)を有する円柱形状のベース体側ストッパ332が設けられている。このベース体側ストッパ332は、ビス(図示しない)などの固定部材によってベース体322に固定されている。また、ベース体側ストッパ332は、ベース体322の表面から垂直方向、つまり、プーリユニット153の表面方向に突起する略円柱の形状の部材である。このベース体側ストッパ332の外周面が円板側ストッパ341の当接部342が当接できる位置であって(図29参照)、フランジ部302の円板外表面とベース体322の外表面が対向する間の空間に位置決めされ、突出している。
As shown in FIG. 28, the
さらに、図30に示すように、プーリユニット153は、滑らかな回動動作ができるように、ベース体322と円板側ストッパ341が対向する面、取付板323と外向鍔部301F(図10参照)が対向する面との間に距離△hにおいてその厚さ方向に夫々離間するようにクリアランスを有している。このクリアランスの距離△hの範囲において、プーリユニット153は、その厚さ方向に移動する。そのため、ベース体側ストッパ332は、このプーリユニット153が厚さ方向に移動しても、その円柱部336が、円板側ストッパ324の当接部342と必ず当接できる筒長であって、突出する側の端面がフランジ部302の円板外表面に接触しない筒長を有している。
Further, as shown in FIG. 30, the
なお、プーリユニット154は、プーリユニット153と同一の構成を有しているので、その説明は省略する。
Since the
次に、本実施の形態に係る内視鏡装置1の動作について説明するが、第1の実施の形態において説明した動作については省略する。 Next, the operation of the endoscope apparatus 1 according to the present embodiment will be described, but the operation described in the first embodiment will be omitted.
通常において、第1の実施の形態と同様に、ここでは、プーリユニット153は、操作指示された通りに時計回りに回動する。しかしながら、電動湾曲回路部35には、プーリユニット153の所定の回動量を超える設定が誤ってされ、内視鏡2の湾曲部23が最大湾曲角度を超える湾曲動作がされる場合もある。
Normally, as in the first embodiment, here, the
そこで、プーリユニット153は、内視鏡2の湾曲部23の湾曲角度が過大な角度にならない微小角度に設定湾曲角度を超える程度に回動し、図29のように、円板側ストッパ341の当接部342とベース体側ストッパ332の円柱部336が当接して時計回り方向の回動が阻止される。
Therefore, the
また、反時計回りの場合においても、プーリユニット153の当接部342は、上述と同様にベース体側ストッパ332の円柱部336が当接して、プーリユニット153の反時計回り方向の回動が阻止される。
Even in the case of counterclockwise rotation, the abutting
以上のプーリユニット153の時計回り方向の動作は、プーリユニット153が反時計回り方向の回動によって電動湾曲駆動部側ワイヤ142を牽引し、電動湾曲駆動部側ワイヤ141を弛緩する場合においても同様であるため説明は省略する。さらに、プーリユニット154の回動の動作については、同一の構成を有しているので、その動作説明は省略する。
The above-described clockwise operation of the
以上の結果、第1の実施の形態の効果に加え、フランジ部302は、突起する突部を取り除かれたことによって、仮に電動湾曲駆動部側ワイヤ141,142が夫々のワイヤ長の伸縮によるだぶつきが生じた場合においても、フランジ部302の突部が引っ掛けられることはない。そのため、内視鏡2の湾曲部23は、その湾曲動作に影響を与えられなくなる。
As a result of the above, in addition to the effects of the first embodiment, the
また、電動湾曲駆動部側ワイヤ141,142及びプーリユニット153は、上述のようなフランジ部302の突部が電動湾曲駆動部側ワイヤ141,142に引っ掛けられることによるプーリユニット153の損傷を防止できる。
Further, the electric bending drive
さらに、フランジ部302の円板外周形状は、小型化にできるため、プーリユニット153のプーリ本体301の小型化にできると共に、プーリユニット153を安定した回動阻止機能を保つことができる。
Furthermore, since the disc outer peripheral shape of the
なお、プーリ本体のプーリユニット153とストッパ円板340は、一体部材となるようにしても良い。
さらに、第1の実施の形態及び第2の実施の形態に係わるプーリユニット153,154を回動させる手段は、モータユニット211、212による回動伝達に係わらず、手動による回動手段の操作ノブに連結されてもよい。
The
Further, the means for rotating the
(第3の実施の形態)
本実施の形態に係る内視鏡装置1について、図31及び図32を参照しながら、以下に説明する。また、本実施の形態の内視鏡装置1に説明において、第1の実施の形態及び第2の実施の形態と同一の構成については、同符号を付し、その構成、動作及び効果を有する事項については、説明を省略し、主に電動湾曲駆動部34の構成、動作及び効果を説明する。なお、プーリユニット154は、プーリユニット153と同一の構成を有しているのため、その説明は省略する。
(Third embodiment)
The endoscope apparatus 1 according to the present embodiment will be described below with reference to FIGS. 31 and 32. FIG. In the description of the endoscope apparatus 1 of the present embodiment, the same components as those of the first embodiment and the second embodiment are denoted by the same reference numerals, and have the configuration, operation, and effect. Description of items will be omitted, and the configuration, operation, and effects of the electric
図31は、内視鏡装置1の内部に設けられるモータユニット211がベース体322に取り付けられ、プーリユニット153が出力軸217に係合される電動湾曲駆動部34の周辺の分解組立て図である。図32は、図31の各種部材が組立てられた後の、電動湾曲駆動部34の周辺の部分断面図である。
FIG. 31 is an exploded view of the periphery of the electric
図31に示すように、板状のベース体322は、略円形の孔部1005と、この孔部1005の周辺に4つの皿孔1007とを有している。これら4つの皿孔1007は、夫々に4つの皿ねじ1006が挿通され、後述するモータユニット211のねじ孔部1015と皿ねじ1006が螺合できるように、4つのねじ孔部1015の夫々と重なる位置に設けられている。
As shown in FIG. 31, the plate-
モータ部320を有するモータユニット211の減速ギヤ部321は、この減速ギア部321の外装であるケーシング1000に覆われている。
The
このケーシング1000の一面には、4つのねじ孔部1015と、少なくとも1つのビス孔1002を有している。このねじ孔部1015は、ケーシング1000の一面に直交する方向に突起している筒形状をしている。
One surface of the
このビス孔1002は、後述する出力軸217に係合するストッパ円板1004の外周面と所定の距離に離間したケーシング1000の一面に設けられるねじ孔である。
The
ストッパ円板1004は、第1の突部として、その回転軸に略直交する平面内であって、外周方向に向けて突起する円板側ストッパ1003を有している。このストッパ円板1004は、その中心に側面が面取りされた略半円形状の出力軸217の断面と同じ形状の孔を有している。さらに、ストッパ円板1004は、出力軸217に向かって係合する側の面とその面と対向する出力軸217の面取り部の終端面と当接する。
The
また、ビス孔1002には、第2の突部として、略円柱状のモータユニット側ストッパ1001が螺合して固定される。
In addition, a substantially cylindrical motor
ねじ孔部1015の筒長は、モータユニット側ストッパ1001の螺合するねじ部分を除いた長手方向のモータユニット側ストッパ1001の長さよりも短い長さを有する。これら4つのねじ孔部1015の端面にベース体322の一面が当接し、ベース体322とモータユニット211は、皿ねじ1006によって一体となるように夫々固定される。
The cylinder length of the
さらに、モータユニット211は、モータ部320側のケーシング1000の面にポテンションメータ151を有し、ポテンションメータ151のある面と反対側のケーシング1000の面と直交する方向に突出する出力軸217を有している。
Further, the
この出力軸217が突出する方向、つまり、出力軸217の先端側から略円板状のストッパ円板1004が出力軸217に係合される。
A substantially disc-shaped
モータユニット側ストッパ1001及びストッパ円板1004などから構成される電動湾曲駆動部34の周辺は、図32に示すような状態となる。図32に示すように、モータユニット側ストッパ1001及びストッパ円板1004の夫々の一面は、夫々ベース体322の孔部1005の孔厚、つまり、ベース体322の板厚の範囲内に収められる。
The periphery of the electric
さらに詳しく説明すれば、モータユニット側ストッパ1001の端面、つまり、モータユニット211のケーシング1000(図31参照)に螺合する側と反対側の面は、べース体322のプーリユニット153の一面と対向する面と略同等の面上に位置する。また、ストッパ円板1004の両面は、ベース体322の両面と略同等の面上に位置する。言いかえれば、ストッパ円板1004は、ベース体322の孔部1005内に収まるように位置している。
More specifically, the end surface of the motor
本実施の形態の内視鏡装置1の動作は、第1の実施の形態及び第2の実施の形態の内視鏡装置1と同じ動作であるため、その説明は省略する。 Since the operation of the endoscope apparatus 1 of the present embodiment is the same as that of the endoscope apparatus 1 of the first embodiment and the second embodiment, the description thereof is omitted.
つまり、通常において、第1の実施の形態及び第2の実施の形態と同様に、ここでは、プーリユニット153は、操作指示された通りに時計回りに回動する。しかしながら、電動湾曲駆動部34の電動湾曲回路部35(図2参照)には、プーリユニット153の所定の回動量を超える設定が誤ってされ、内視鏡2の湾曲部23が最大湾曲角度を超える湾曲動作がされる場合もある。
In other words, normally, as in the first and second embodiments, here, the
そこで、プーリユニット153は、内視鏡2の湾曲部23の湾曲角度が過大な角度にならない微小角度に設定湾曲角度を超える程度に回動し、円板側ストッパ1003の側面である当接部とモータユニット側ストッパ1001の外周面である円柱部が当接して時計回り方向又は半時計回りの回動が阻止される。
Accordingly, the
その結果、第1の実施の形態及び第2の実施の形態の効果に加え、本実施の形態の内視鏡装置1は、ベース体322の板厚内にモータユニット側ストッパ1001の一部とストッパ円板1004が収められるため、電動湾曲駆動部34の周辺のスペースを小さくすることができる。
As a result, in addition to the effects of the first embodiment and the second embodiment, the endoscope apparatus 1 of the present embodiment has a portion of the motor
なお、ビス孔1002は、モータユニット211のケーシング1000の一面に複数設けても良い。つまり、内視鏡2の湾曲特性に合った、所望の湾曲角度位置に選択できるようにモータユニット側ストッパ1001がモータユニット211のケーシング1000に取り付けることができる。
A plurality of
次に、本実施形態の変形例を図33及び図34を使って説明する。図33及び図34に示すように、ベース体322とモータユニット211の間に板状の保持板1008が設けられている。
Next, a modification of this embodiment will be described with reference to FIGS. As shown in FIGS. 33 and 34, a plate-
図33は、湾曲操作駆動部34の周辺の分解組立図であって、図34は、図33の各種部材が組立てられた後の、電動湾曲駆動部34の周辺の部分断面図である。
33 is an exploded view of the periphery of the bending
図33に示す保持板1008は、中央に出力軸217が貫通する軸孔部1025と、保持板側ストッパ1001aが螺合するねじ孔1009と、4つの皿ねじ1006が夫々入る4つの皿孔1007と、4つのビス1010が夫々貫通する4つの孔部1020とを有している。
A holding
この保持板1008は、4つの皿ねじ1006によってモータユニット211と固定され、4つのビス1010によってベース体322と固定される。詳しくは、保持板1008の4つの皿孔1007に皿ねじ1006が夫々通され、これら4つの皿ねじ1006がモータユニット211のケーシング1000の一表面に設けられる4つのねじ孔部1015と夫々に螺合する。従って、保持板1008とモータユニット211とは、一体となるように固定される。また、保持板1008の4つの孔部1020にビス1010が夫々通され、これら4つのビス1010がベース体322のビス孔1011と夫々に螺合し、保持板1008とベース体322とが一体となるように固定される。
The holding
その結果、モータユニット211、保持板1008及びベース体322は、一体となる。なお、保持板1008の4つの孔部1020と4つの皿孔1007は、皿ねじ1006又はビス1010が夫々に対応するモータユニット211又はベース体322のねじ孔部1015又はビス孔1011と螺合できるような位置に設けられる。
As a result, the
保持板1008のねじ孔1009に螺合する保持板側ストッパ1001aは、略円柱形状をしており、ストッパ円板1004の円板側ストッパ1003の側面である当接部が当接する面を有している。また、このねじ孔1009は、後述する出力軸217に係合するストッパ円板1004の外周と所定の距離に離間した位置の保持板1008に設けられるねじ溝である。
A holding plate-
図34に示すように、保持板側ストッパ1001a及びストッパ円板1004の夫々の一面は、夫々ベース体322の孔部1005の孔厚、つまり、ベース体322の板厚内に収められる。さらに詳しく説明すれば、保持板側ストッパ1001aの端面、つまり、保持板1008に螺合する側と反対側の面は、べース体322のプーリユニット153の一面と対向する面と略同等の面上に位置する。また、ストッパ円板1004の両面は、ベース体322の両面と略同等の面上に位置する。言いかえれば、ストッパ円板1004は、ベース体322の孔部1005内に位置している。
As shown in FIG. 34, one surface of each of the holding
この保持板1008を設けることによって、前述のモータユニット211のケーシング1000には、ビス孔1002を設ける必要が無くなる。しかし、保持板1008の厚保さ分だけ、電動湾曲駆動部34の周辺が大きくなるが、保持板1008の広い範囲に渡る任意の位置にねじ孔1009を設けることが可能となる。さらに、電動湾曲駆動部34の周辺の強度が強くなる。
By providing the
なお、ねじ孔1009は、保持板1008に複数設けても良い。つまり、作業者は、内視鏡2の湾曲特性に合った所望の湾曲角度位置に選択できるように保持板側ストッパ1001aを保持板1008に取りつけることができる。
Note that a plurality of
ケーシング1000の強度を変えることなく、内視鏡2の湾曲特性に応じた位置に保持板側ストッパ1001aを所望の位置に設けることができる。
Without changing the strength of the
なお、上述の第1の実施の形態から第3の実施の形態に係る本発明の内視鏡装置1は、それら実施の形態の趣旨を逸脱しない範囲で実施例を組替えて使用しても良い。 Note that the endoscope apparatus 1 of the present invention according to the first to third embodiments described above may be used by rearranging the examples without departing from the spirit of these embodiments. .
3…ドラム部(収納部),21…挿入部,23…湾曲部,131,132…湾曲操作ワイヤ(一対の操作ワイヤ),133,134…湾曲操作ワイヤ(一対の操作ワイヤ),135,136…挿入部側ワイヤ(一対の操作ワイヤ),137,138…挿入部側ワイヤ(一対の操作ワイヤ),141,142…電動湾曲駆動部側ワイヤ(一対の操作ワイヤ),143,144…電動湾曲駆動部側ワイヤ(一対の操作ワイヤ),153…プーリユニット,154…プーリユニット,301…プーリ本体(プーリ),303…係止部材(係止部),303a,303b…係止部材(一対の係止部),310a…係止口金(口金部),310b…係止口金(口金部),324…フランジ側ストッパ(第1の突部),325…ベース体側ストッパ(第2の突部),326a,326b…当接部,327…ビス,328a,328b…周面部,390…プーリユニット,391…プーリユニット,401…プーリ本体(プーリ),403…係止部材(係止部)(1つの係止部),409a…係止口金(口金部),409b…係止口金(口金部),509a…係止口金(口金部)
代理人 弁理士 伊 藤 進
DESCRIPTION OF
Agent Patent Attorney Susumu Ito
Claims (15)
該内視鏡の先端部分に設けられる湾曲操作される湾曲部と、
該湾曲部から夫々延出し、前記湾曲部を少なくとも2つの方向に湾曲操作する一対の操作ワイヤと、該一対の操作ワイヤが巻回され、2枚のフランジ部が対向配置されているプーリユニットと、
前記プーリユニットを回動自在に支軸する軸部材と、
が設けられている内視鏡装置であって、
前記プーリユニットの回転軸に略直交する平面内において、前記プーリユニットの前記2枚のフランジ部の外周面から夫々突起する2つの第1の突部と、
前記2枚のフランジ部の外周面から離間した位置で、且つ前記プーリユニットと共に回動する前記第1の突部が当接する位置に設けられ、前記第1の突部が当接して前記プーリユニットの最大回動量を規制して、前記湾曲部の最大湾曲角度を規定する第2の突部と、
前記プーリユニットを
軸支する前記軸部材、および前記第2の突部が設けられるベース体と、
を備え、
前記2枚のフランジ部の少なくとも1つの前記第1の突部を前記回転軸から外周側に向けた突起する方向を変更自在とし、前記第1の突部が前記第2の突部に当接することで規制される前記プーリユニットの時計回りと反時計回り方向の回動範囲を変更することで、前記湾曲部が略直線状態となる前記一対の操作ワイヤが初期状態とされている基準位置から前記プーリユニットの時計回りの最大回動量の範囲と反時計回りの最大回動量の範囲が夫々異なるよう変更され、前記湾曲部の相対的に湾曲する方向の最大湾曲角度が異なるように設定自在としたことを特徴とする内視鏡装置。 An endoscope having flexibility and an elongated insertion portion;
A bending portion that is provided at a distal end portion of the endoscope and is operated to bend;
A pair of operation wires that respectively extend from the bending portion and operate to bend the bending portion in at least two directions; a pulley unit in which the pair of operation wires are wound and two flange portions are opposed to each other; ,
A shaft member for pivotally supporting the pulley unit;
An endoscope apparatus provided with
Two first protrusions that respectively protrude from outer peripheral surfaces of the two flange portions of the pulley unit in a plane substantially orthogonal to the rotation axis of the pulley unit;
The pulley unit is provided at a position spaced apart from the outer peripheral surfaces of the two flange portions and at a position where the first protrusion that rotates together with the pulley unit contacts, and the first protrusion contacts the pulley unit. A second protrusion that regulates the maximum turning angle of the bending portion and regulates the maximum bending angle of the bending portion,
The shaft member that pivotally supports the pulley unit, and a base body provided with the second protrusion;
With
The direction in which at least one of the first protrusions of the two flange portions protrudes from the rotating shaft toward the outer peripheral side can be changed, and the first protrusion abuts on the second protrusion. By changing the range of clockwise and counterclockwise rotation of the pulley unit that is restricted by this, the pair of operation wires in which the bending portion is in a substantially straight state is changed from the reference position in the initial state. The range of the maximum clockwise rotation amount of the pulley unit and the range of the maximum counterclockwise rotation amount are changed so as to be different from each other, and the maximum bending angle in the relatively bending direction of the bending portion can be set to be different. An endoscopic device characterized by that.
該内視鏡の先端部分に設けられる湾曲操作される湾曲部と、
該湾曲部から夫々延出し、前記湾曲部を少なくとも2つの方向に湾曲操作する一対の操作ワイヤと、
該一対の操作ワイヤが巻回され、2枚のフランジ部が対向配置されているプーリユニットと、
前記プーリユニットを回動自在に支軸する軸部材と、
が設けられている内視鏡装置であって、
前記プーリユニットの回転軸に略直交する平面内において、前記プーリユニットの前記2枚のフランジ部の夫々の外周面から同じ方向に夫々突起する2つの第1の突部と、
前記2枚のフランジ部の外周面から離間した位置で、且つ前記プーリユニットと共に回動する前記2つの第1の突部が当接する位置に設けられ、前記湾曲部が略直線状態となる前記一対の操作ワイヤが初期状態とされている基準位置から前記2つの第1の突部が当接して前記プーリユニットの最大回動量を規制して、前記湾曲部の最大湾曲角度を規定する第2の突部と、
前記プーリユニットを軸支する前記軸部材、および前記第2の突部が設けられるベース体と、
を有していることを特徴とする内視鏡装置。 An endoscope having flexibility and an elongated insertion portion;
A bending portion that is provided at a distal end portion of the endoscope and is operated to bend;
A pair of operation wires respectively extending from the bending portion and bending the bending portion in at least two directions;
A pulley unit in which the pair of operation wires are wound, and the two flange portions are arranged to face each other;
A shaft member for pivotally supporting the pulley unit;
An endoscope apparatus provided with
Two first protrusions projecting in the same direction from the respective outer peripheral surfaces of the two flange portions of the pulley unit in a plane substantially perpendicular to the rotation axis of the pulley unit;
The pair of the two flange portions provided at positions spaced apart from the outer peripheral surfaces of the two flange portions and at positions where the two first protrusions rotating together with the pulley unit come into contact with each other, and the curved portions are in a substantially linear state. The second first protrusions come into contact with each other from the reference position in which the operation wire is in the initial state to regulate the maximum amount of rotation of the pulley unit to define the maximum bending angle of the bending portion. With protrusions,
The shaft member that pivotally supports the pulley unit, and a base body provided with the second protrusion;
An endoscope apparatus characterized by comprising:
前記プーリユニットは、前記各口金部を係脱自在に保持することにより、前記一対の操作ワイヤを牽引弛緩して前記湾曲部を湾曲操作する係止部を有していることを特徴とする請求項1から請求項3のいずれかに記載の内視鏡装置。 Each of the pair of operation wires has a base portion provided at a base end portion,
The pulley unit includes an engaging portion that pulls and loosens the pair of operation wires to bend and operate the bending portion by holding the base portions detachably. The endoscope apparatus according to any one of claims 1 to 3.
前記第1の突部は、前記少なくとも1つの前記第2の突部と当接することを特徴とする請求項1から請求項4のいずれかに記載の内視鏡装置。 Having at least one second protrusion,
The endoscope apparatus according to claim 1, wherein the first protrusion is in contact with the at least one second protrusion.
前記湾曲部が略直線状態となる前記一対の操作ワイヤが初期状態とされている位置を基準位置として、前記2つの第2の突部は、当接される前記第1の突部の一方向の最大回動量と、前記第1の突部の前記一方向と逆の方向の最大回動量が同じになるように夫々位置決めされ、前記ベース体の前記固定部に固定されていることを特徴とする請求項3に記載の内視鏡装置。 Two second protrusions,
The two second protrusions are in one direction with which the two second protrusions are brought into contact with each other, with a position where the pair of operation wires in which the curved portions are in a substantially straight state being in an initial state as a reference position The maximum rotation amount of the first protrusion and the maximum rotation amount in the direction opposite to the one direction of the first protrusion are respectively positioned and fixed to the fixing portion of the base body. The endoscope apparatus according to claim 3 .
前記湾曲部が略直線状態となる前記一対の操作ワイヤが初期状態とされている位置を基準位置として、前記2つの第2の突部は、当接される前記第1の突部の一方向の最大回動量と、前記第1の突部の前記一方向と逆の方向の最大回動量が異なるように夫々位置決めされ、前記ベース体の前記固定部に固定されていることを特徴とする請求項3に記載の内視鏡装置。 Two second protrusions,
The two second protrusions are in one direction with which the two second protrusions are brought into contact with each other, with a position where the pair of operation wires in which the curved portions are in a substantially straight state being in an initial state as a reference position The maximum rotation amount of the first protrusion and the maximum rotation amount in the direction opposite to the one direction of the first protrusion are respectively positioned and fixed to the fixing portion of the base body. Item 5. The endoscope apparatus according to Item 3 .
前記プーリユニットは、前記各口金部を係脱自在に保持することにより、前記一対の操作ワイヤを牽引弛緩して前記湾曲部を湾曲操作する係止部を有していることを特徴とする請求項6に記載の内視鏡装置。The pulley unit includes an engaging portion that pulls and loosens the pair of operation wires to bend and operate the bending portion by holding the base portions detachably. The endoscope apparatus according to Item 6.
前記プーリユニットは、前記各口金部を係脱自在に保持することにより、前記一対の操作ワイヤを牽引弛緩して前記湾曲部を湾曲操作する係止部を有していることを特徴とする請求項7に記載の内視鏡装置。The pulley unit includes an engaging portion that pulls and loosens the pair of operation wires to bend and operate the bending portion by holding the base portions detachably. Item 8. The endoscope apparatus according to Item 7.
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2004079263A JP4526284B2 (en) | 2004-03-18 | 2004-03-18 | Endoscope device |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2004079263A JP4526284B2 (en) | 2004-03-18 | 2004-03-18 | Endoscope device |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2005261688A JP2005261688A (en) | 2005-09-29 |
| JP2005261688A5 JP2005261688A5 (en) | 2007-04-12 |
| JP4526284B2 true JP4526284B2 (en) | 2010-08-18 |
Family
ID=35086825
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2004079263A Expired - Fee Related JP4526284B2 (en) | 2004-03-18 | 2004-03-18 | Endoscope device |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP4526284B2 (en) |
Families Citing this family (13)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP5097347B2 (en) * | 2005-12-26 | 2012-12-12 | オリンパスメディカルシステムズ株式会社 | Endoscope and endoscope system |
| US9173550B2 (en) | 2006-01-13 | 2015-11-03 | Olympus Corporation | Medical apparatus |
| US8556805B2 (en) | 2006-01-13 | 2013-10-15 | Olympus Medical Systems Corp. | Rotational force transmission mechanism, force-attenuating apparatus, medical device, and medical instrument-operation mechanism |
| US9308049B2 (en) | 2006-01-13 | 2016-04-12 | Olympus Corporation | Medical treatment endoscope |
| US8617054B2 (en) | 2006-01-13 | 2013-12-31 | Olympus Medical Systems Corp. | Medical treatment endoscope |
| US9289112B2 (en) | 2006-01-13 | 2016-03-22 | Olympus Corporation | Medical treatment endoscope having an operation stick formed to allow a procedure instrument to pass |
| KR100959567B1 (en) * | 2008-01-31 | 2010-05-27 | 주식회사 액츠비전 | Endoscope |
| US20090287054A1 (en) * | 2008-05-19 | 2009-11-19 | Olympus Medical Systems Corp. | Bending tube and medical apparatus |
| JP2010119556A (en) * | 2008-11-19 | 2010-06-03 | Hoya Corp | Bending operation device for endoscope |
| WO2016189964A1 (en) * | 2015-05-28 | 2016-12-01 | オリンパス株式会社 | Endoscope |
| WO2019220732A1 (en) * | 2018-05-14 | 2019-11-21 | オリンパス株式会社 | Endoscope bending operation mechanism |
| JP7412253B2 (en) * | 2020-04-02 | 2024-01-12 | Hoya株式会社 | endoscope equipment |
| CN115105213A (en) * | 2022-06-20 | 2022-09-27 | 江苏唯德康医疗科技有限公司 | Flexible robot device for assisting endoscopic surgery |
Family Cites Families (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS58139111U (en) * | 1982-03-15 | 1983-09-19 | オリンパス光学工業株式会社 | Intrabody ultrasound diagnostic device |
| JPS6133012U (en) * | 1984-07-27 | 1986-02-28 | 三菱電線工業株式会社 | fiber scope |
| JPS63161930A (en) * | 1986-12-25 | 1988-07-05 | 三菱電線工業株式会社 | Objective part operation apparatus of fiberscope |
| JP2918171B2 (en) * | 1990-04-25 | 1999-07-12 | 旭光学工業株式会社 | Endoscope bending operation device |
| JPH0975301A (en) * | 1995-09-19 | 1997-03-25 | Toshiba Corp | Remote manipulator |
-
2004
- 2004-03-18 JP JP2004079263A patent/JP4526284B2/en not_active Expired - Fee Related
Also Published As
| Publication number | Publication date |
|---|---|
| JP2005261688A (en) | 2005-09-29 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP4526284B2 (en) | Endoscope device | |
| EP1088510B1 (en) | Endoscope with objective lens drive mechanism | |
| US9339171B2 (en) | Endoscope | |
| US7285088B2 (en) | Endoscope apparatus | |
| US20080171910A1 (en) | Medical apparatus | |
| JP2006218232A (en) | Flexible tube for endoscope and endoscope | |
| US11311179B2 (en) | Endoscope | |
| JP2011177383A (en) | Operation wire connecting device of endoscope, and endoscope | |
| WO2022008442A1 (en) | Deflection control mechanism for a steerable flexible endoscope, steerable flexible endoscope, endoscope assembly set, and method for assembling a flexible endoscope | |
| US10117566B2 (en) | Driving force transmission mechanism for medical devices | |
| JP3572975B2 (en) | Endoscope with objective lens moving mechanism | |
| EP4316346A1 (en) | Endoscope having friction control part | |
| EP4316347A1 (en) | Endoscope having tension adjustment part | |
| JP2011067381A (en) | Endoscope apparatus | |
| JP2005218569A (en) | Endoscope | |
| JP3572976B2 (en) | Endoscope with objective lens moving mechanism | |
| JPH0482529A (en) | Endoscope | |
| JP4658536B2 (en) | Endoscope device | |
| JP3557936B2 (en) | Endoscope with objective lens moving mechanism | |
| JP4575110B2 (en) | Endoscope device | |
| JPH0560734B2 (en) | ||
| JP2003000533A (en) | Endoscopic apparatus | |
| JP4520194B2 (en) | Endoscope | |
| JP2006061176A (en) | Bending device | |
| JP2006068448A (en) | Endoscope apparatus |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20070228 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20070228 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20091027 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20091222 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20100126 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20100329 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20100413 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20100427 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20100525 |
|
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20100601 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20130611 Year of fee payment: 3 |
|
| R151 | Written notification of patent or utility model registration |
Ref document number: 4526284 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R151 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20130611 Year of fee payment: 3 |
|
| S531 | Written request for registration of change of domicile |
Free format text: JAPANESE INTERMEDIATE CODE: R313531 |
|
| R350 | Written notification of registration of transfer |
Free format text: JAPANESE INTERMEDIATE CODE: R350 |
|
| LAPS | Cancellation because of no payment of annual fees |