JP4457971B2 - 光ディスク装置 - Google Patents
光ディスク装置 Download PDFInfo
- Publication number
- JP4457971B2 JP4457971B2 JP2005150328A JP2005150328A JP4457971B2 JP 4457971 B2 JP4457971 B2 JP 4457971B2 JP 2005150328 A JP2005150328 A JP 2005150328A JP 2005150328 A JP2005150328 A JP 2005150328A JP 4457971 B2 JP4457971 B2 JP 4457971B2
- Authority
- JP
- Japan
- Prior art keywords
- track
- track jump
- error signal
- tracking error
- signal
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
Images






Landscapes
- Moving Of The Head For Recording And Reproducing By Optical Means (AREA)
Description
前記アクチュエータにトラック1本移動用の固定電圧を印加し、トラックジャンプ動作をした後、再び負帰還制御を再開する。以上のトラックジャンプ動作をN回繰り返すことでNトラックのトラック移動を実現している。
また、前記トラッキングエラー信号観測手段は、前記トラックジャンプ終了から所定期間のトラッキングエラー信号のオーバーシュート量を観測する構成とした。
また、前記トラッキングエラー信号の過渡波形の対象性が所定値以下になるようにトラックジャンプ制御手段のアクチュエータに印加する駆動電圧の時間幅を変化させる構成とした。
図1において、1は光ディスク、2はスピンドルモータ、3はスピンドルサーボ部、4はピック部、5はトラックアクチュエータ、6はフォーカスアクチュエータ、7はスライダ機構、8はスライダ用モータ、9は再生処理部、10は補償器、11はホールドアンプ部、12はドライバ部、13は平均処理部、14はドライバ部、15はメモリ部、16はトラックジャンプ制御部、17はトラックジャンプ駆動波形生成部、18はスイッチ回路、19は過渡波形判定部、20は波形メモリ部、21はスイッチ回路部、22はフォーカスサーボ部である。
一方、トラックからの偏差量を示すトラッキングエラー信号(TE信号)は、補償器10により、位相補償された後、ホールドアンプ部11へ入力される。ホールドアンプ部11は、トラックジャンプ制御部16からのトラックジャンプ期間を示す信号(JGT信号)によりトラックジャンプ中は、トラッキング信号をホールドするように動作する。
図4(2)は、対物レンズのトラック方向アクチュエータの駆動機構の一例を示す。100は対物レンズ、101はコイル、102−a、102−bは、つりばね兼コイルへの電流路、103はマグネット、104はレンズホルダーである。トラック駆動信号として例えばDC電流をコイル101に印加し、その電流値を増やしていくと、コイル101はマグネット103に吸引されてF1の方向にレンズホルダーが変移していく。
2……スピンドルモータ
3……スピンドルサーボ部
4……ピック部
5……トラックアクチュエータ
6……フォーカスアクチュエータ
7……スライダ機構
8……スライダ用モータ
9……再生処理部
10……補償器
11……ホールドアンプ部
12……ドライバ部
13……平均処理部
14……ドライバ部
15……メモリ部
16……トラックジャンプ制御部
17……トラックジャンプ駆動波形生成部
18……スイッチ回路
19……過渡波形判定部
20……波形メモリ部
21……スイッチ回路部
22……フォーカスサーボ部
30……入力端子
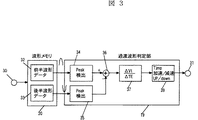
32……前半波形データ格納部
33……後半波形データ格納部
34、35……ピーク検出部
36……加算器
37……係数器
39……Tjmp加速/減速部
Claims (6)
- 半導体レーザの光源と、
対物レンズを駆動するアクチュエータと、
前記光源からのレーザ光を前記対物レンズで集光した光スポットと、
記録媒体のトラック中心との位置誤差をトラッキングエラー信号として検出するトラッキングエラー信号検出手段と、
前記トラッキングエラー信号を用いて前記光スポットをトラック中心に追従するように前記アクチュエータを制御するトラッキング制御手段と、
近傍のトラックに光スポットをトラックジャンプ移動させるトラックジャンプ制御手段と、
前記トラックジャンプ終了から所定期間のトラッキングエラー信号を取得するトラッキングエラー信号観測手段を備え、
前記トラックジャンプ終了から所定期間のトラッキングエラー信号のオーバーシュート量に応じて、前記トラックジャンプ制御手段のトラック駆動信号を変更することを特徴とした光ディスク装置。 - 請求項1記載の光ディスク装置において、
前記トラッキングエラー信号の過渡波形の対象性が所定値以下になるように、
前記トラックジャンプ制御手段のアクチュエータ駆動電圧値を増減することを特徴とした光ディスク装置。 - 請求項1記載の光ディスク装置において、
前記トラッキングエラー信号の過渡波形の対象性が所定値以下になるように、
前記トラックジャンプ制御手段のアクチュエータに印加する駆動電圧の時間幅を変化させることを特徴とした光ディスク装置。 - 請求項1記載の光ディスク装置において、
前記トラッキングエラー信号観測手段の結果に応じて、前記トラックジャンプ制御手段のトラック駆動信号を変更することを特徴とした光ディスク装置。 - 請求項4記載の光ディスク装置において、
前記トラッキングエラー信号観測手段は、トラックジャンプ期間における前記トラッキングエラー信号の過渡波形の対象性を観測することを特徴とした光ディスク装置。 - 請求項4記載の光ディスク装置において、
前記トラッキングエラー信号の過渡波形の対象性が所定値以下になるように、
トラックジャンプ制御手段のアクチュエータ駆動電圧値を増減することを特徴とした光ディスク装置。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2005150328A JP4457971B2 (ja) | 2005-05-24 | 2005-05-24 | 光ディスク装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2005150328A JP4457971B2 (ja) | 2005-05-24 | 2005-05-24 | 光ディスク装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2006331481A JP2006331481A (ja) | 2006-12-07 |
| JP4457971B2 true JP4457971B2 (ja) | 2010-04-28 |
Family
ID=37553036
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2005150328A Expired - Fee Related JP4457971B2 (ja) | 2005-05-24 | 2005-05-24 | 光ディスク装置 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP4457971B2 (ja) |
-
2005
- 2005-05-24 JP JP2005150328A patent/JP4457971B2/ja not_active Expired - Fee Related
Also Published As
| Publication number | Publication date |
|---|---|
| JP2006331481A (ja) | 2006-12-07 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP4457971B2 (ja) | 光ディスク装置 | |
| CN1259656C (zh) | 光盘装置 | |
| KR101070000B1 (ko) | 광 픽업장치와, 광 픽업 제어장치 및, 광 픽업 제어방법 | |
| JP3484039B2 (ja) | ディスク装置 | |
| US7391682B2 (en) | Optical disk system with improved signal regulation capability | |
| JP3257655B2 (ja) | 光学的情報記録再生装置 | |
| KR20080033337A (ko) | 적응 제어신호를 발생할 수 있는 광학장치 | |
| JP4573329B2 (ja) | 光ディスク装置 | |
| US7583568B2 (en) | Focus control device and method of adjusting focus gain prior to focus-servo operation | |
| EP2293296A1 (en) | Focus jump method and optical disc apparatus | |
| JP6596093B2 (ja) | 光記憶装置における光学ヘッドのトラッキングサーボシステムの適応制御装置 | |
| US20080159101A1 (en) | Optical disk device and control method thereof | |
| JP2010135018A (ja) | 光ディスク装置およびトラック位置誤差検出方法並びにプログラム | |
| JP2007305248A (ja) | 光ディスク装置 | |
| JP2011233204A (ja) | 最適サーボパラメータの検出装置、最適サーボパラメータの検出方法、および、その検出方法によって検出された最適サーボパラメータが記録された光ピックアップ装置 | |
| JPWO2008132784A1 (ja) | チルト制御方法、集積回路、および光ディスク装置 | |
| JP2009238329A (ja) | 光ディスク装置及びその制御方法 | |
| JPH0612692A (ja) | 光ディスク装置 | |
| JP2006059410A (ja) | 光ディスク装置 | |
| JPH1116304A (ja) | 光ディスク装置 | |
| JP2005166088A (ja) | 光ディスク装置 | |
| JPH05250683A (ja) | フォーカス・サーボ引き込み制御方法 | |
| JP2007134005A (ja) | 光ディスク装置の記録方法および光ディスク装置 | |
| JPH11306553A (ja) | トラッキング制御方法および光ディスク装置 | |
| JP2006164460A (ja) | 光ディスク装置におけるトラッキング特性調整装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20080131 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20091104 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20091110 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20091221 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20100119 |
|
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20100201 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20130219 Year of fee payment: 3 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20130219 Year of fee payment: 3 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20140219 Year of fee payment: 4 |
|
| S111 | Request for change of ownership or part of ownership |
Free format text: JAPANESE INTERMEDIATE CODE: R313111 |
|
| LAPS | Cancellation because of no payment of annual fees |